leetcode原题 路径总和 I II III(递归实现)
路径总和 I :
给你二叉树的根节点 root 和一个表示目标和的整数 targetSum 。判断该树中是否存在 根节点到叶子节点 的路径,这条路径上所有节点值相加等于目标和 targetSum 。如果存在,返回 true ;否则,返回 false 。
要点:判断是否存在满足条件的路径,只需返回true or false。

输入:root = [5,4,8,11,null,13,4,7,2,null,null,null,1], targetSum = 22
输出:true
解释:等于目标和的根节点到叶节点路径如上图所示。
解题思路:
每遍历一个节点,就从targetsum中减去当前节点的值,当遍历到叶子节点时,如果targetsum=0,说明存在该路径,返回true。反之,返回false
class Solution {
public:bool hasPathSum(TreeNode* root, int targetSum) {if(root==nullptr) return false;targetSum-=root->val;if(root->left==nullptr&&root->right==nullptr){return targetSum==0;}//左子树和右子树有一个满足就可以,所以用||的关系return hasPathSum(root->left,targetSum)||hasPathSum(root->right,targetSum);}
};
路径总和 II:
给你二叉树的根节点 root 和一个整数目标和 targetSum ,找出所有 从根节点到叶子节点 路径总和等于给定目标和的路径。
叶子节点 是指没有子节点的节点。
要点:返回所有满足题意的路径,必须是从根节点开始,叶子节点结束。

输入:root = [5,4,8,11,null,13,4,7,2,null,null,5,1], targetSum = 22
输出:[[5,4,11,2],[5,8,4,5]]
解题思路:
添加一个临时数组,用来存放当前遍历到的节点走过的路径。其他的与第一题相同,找到符合题意的路径,就将临时数组存放到结果数组中,若不符合条件,需回退,注意回退时需要将将一个放到临时数组中的节点删掉。
class Solution {
public:vector<vector<int>> res;//所有路径vector<int> temp;//当前路径void dfs(TreeNode* root, int targetSum){if(root==nullptr) return;temp.push_back(root->val);//当前节点放入到temp中targetSum-=root->val;//从总和中减去//若遇到叶子节点,需判断目标值是否已经为0if(root->left==nullptr&&root->right==nullptr){//目标值=0,说明当前路径符合题意,temp放到res中if(targetSum==0){res.push_back(temp);}}//递归dfs(root->left,targetSum);dfs(root->right,targetSum);//不符合题意,将当前节点从路径中删掉temp.pop_back();}vector<vector<int>> pathSum(TreeNode* root, int targetSum) {dfs(root,targetSum);return res;}
};路径总和 III:
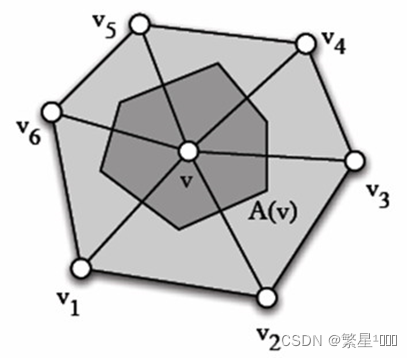
给定一个二叉树的根节点 root ,和一个整数 targetSum ,求该二叉树里节点值之和等于 targetSum 的 路径 的数目。
路径 不需要从根节点开始,也不需要在叶子节点结束,但是路径方向必须是向下的(只能从父节点到子节点)。
要点:返回的是所有符合题意的路径总条数,与第二题不一样的是,可以不是从根节点开始,也不需要在叶子节点结束。
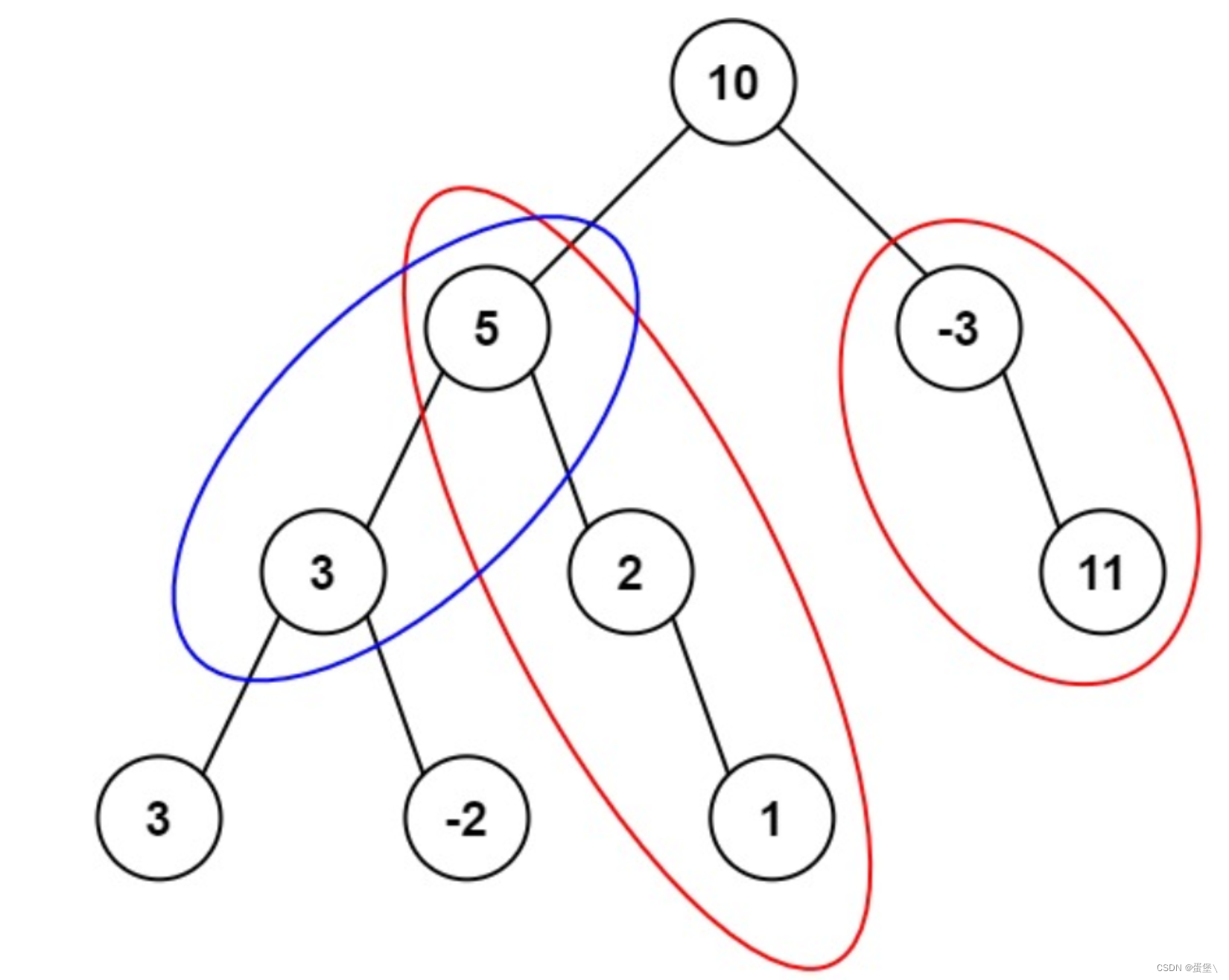
输入:root = [10,5,-3,3,2,null,11,3,-2,null,1], targetSum = 8
输出:3
解释:和等于 8 的路径有 3 条,如图所示。
解题思路:
相当于是递归套递归,构建一个找路径函数,遍历以当前节点为起始的路径中,是否存在符合题意的路径,然后再在原函数递归到每一个节点,使每一个节点都为起始节点进行找符合题意的路径。
class Solution {
public:int res=0;int pathSum(TreeNode* root, int targetSum) {if(root==nullptr) return res;find_path(root,targetSum);//以当前的root节点为起始节点,找路径pathSum(root->left,targetSum);//递归当前根节点的左子树上的节点pathSum(root->right,targetSum);//递归当前根节点的右子树上的节点return res;}//找路径函数void find_path(TreeNode* root,long targetSum){if(root==nullptr) return;targetSum -= root->val;if(targetSum==0)//只要targetsum=0,说明存在一条路径,那么res++{res+=1;}find_path(root->left,targetSum);find_path(root->right,targetSum);}
};相关文章:
leetcode原题 路径总和 I II III(递归实现)
路径总和 I : 给你二叉树的根节点 root 和一个表示目标和的整数 targetSum 。判断该树中是否存在 根节点到叶子节点 的路径,这条路径上所有节点值相加等于目标和 targetSum 。如果存在,返回 true ;否则,返回 false 。…...

【css】css设置表格样式-边框线合并
<style> table, td, th {border: 1px solid black;//设置边框线 }table {width: 100%; }td {text-align: center;//设置文本居中 } </style> </head> <body><table><tr><th>Firstname</th><th>Lastname</th><t…...

使用Flutter的image_picker插件实现设备的相册的访问和拍照
文章目录 需求描述Flutter插件image_picker的介绍使用步骤1、添加依赖2、导入 例子完整的代码效果 总结 需求描述 在应用开发时,我们有很多场景要使用到更换图片的功能,即将原本的图像替换设置成其他的图像,从设备的相册或相机中选择图片或拍…...

数学建模体系
1评价类 主观求权重:层次分析法客观求权重:TOPSIS综合评价:典型相关分析 2预测插值算法拟合多元回归分析时间序列分析、ARCH和garch模型岭回归和lasso回归 3关系相关系数典型相关分析多元回归分析灰色关联分析 4图最短路径:迪杰斯…...
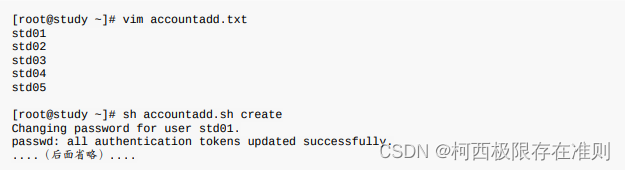
13.7 CentOS 7 环境下大量创建帐号的方法
13.7.1 一些帐号相关的检查工具 pwck pwck 这个指令在检查 /etc/passwd 这个帐号配置文件内的信息,与实际的主文件夹是否存在等信息, 还可以比对 /etc/passwd /etc/shadow 的信息是否一致,另外,如果 /etc/passwd 内的数据字段错…...
HTML5 Canvas(画布)
<canvas>标签定义图形,比如图表和其他图像,你必须用脚本来绘制图形。 在画布上( Canvas )画一个共红色矩形,渐变矩形,彩色矩形,和一些彩色文字。 什么是 Canvas? HTML5<c…...

io的异常处理以及properties
try(流对象的创建) { 对象的处理逻辑} catch(IOException e) { 异常的处理逻辑} public static void test4(){try(FileWriter fwnew FileWriter("a.txt",true); ){char[] cbuf{a};//写入一个字符串组fw.write(cbuf);}catch(IOException e){e.printStackTrace();}}上面…...
Linux下基于Dockerfile构建镜像应用(1)
目录 基于已有容器创建镜像 Dockerfile构建SSHD镜像 构建镜像 测试容器 可以登陆 Dockerfile构建httpd镜像 构建镜像 测试容器 Dockerfile构建nginx镜像 构建镜像 概述: Docker 镜像是Docker容器技术中的核心,也是应用打包构建发布的标准格式。…...

JS中常见的模块管理规范梳理
一、CommonJS规范 CommonJS规范是一种用于JavaScript模块化开发的规范,它定义了模块的导入、导出方式和加载机制,主要用在Node开发中。 1. 使用场景 服务器端开发:Node.js是使用CommonJS规范的,因此在服务器端开发中࿰…...

3维空间下按平面和圆柱面上排版设计
AR空间中将若干平面窗口排列在指定平面或圆柱体面上 平面排版思路 指定平面方向向量layout_centre ,平面上的一点作为排版版面的中心layout_position float3 layout_position = float3(0,0,-10); float3 layout_centre = float3(0,0,1...
【Spring框架】Spring AOP
目录 什么是AOP?AOP组成Spring AOP 实现步骤Spring AOP实现原理JDK Proxy VS CGLIB 什么是AOP? AOP(Aspect Oriented Programming):⾯向切⾯编程,它是⼀种思想,它是对某⼀类事情的集中处理。⽐如…...

寻找旋转排序数组中的最小值——力扣153
文章目录 题目描述解法 二分法 题目描述 解法 二分法 int findMin(vector<int>& nums){int l0, rnums.size()-1;while(l<r){int mid (lr)/2;if(nums[mid]<nums[r]) rmid;else lmid1;}return nums[l];}...
安卓逆向 - 基础入门教程
一、引言 1、我们在采集app数据时,有些字段是加密的,如某麦网x-mini-wua x-sgext x-sign x-umt x-utdid等参数,这时候我们需要去分析加密字段的生成。本篇将以采集的角度讲解入门安卓逆向需要掌握的技能、工具。 2、安卓(Androi…...
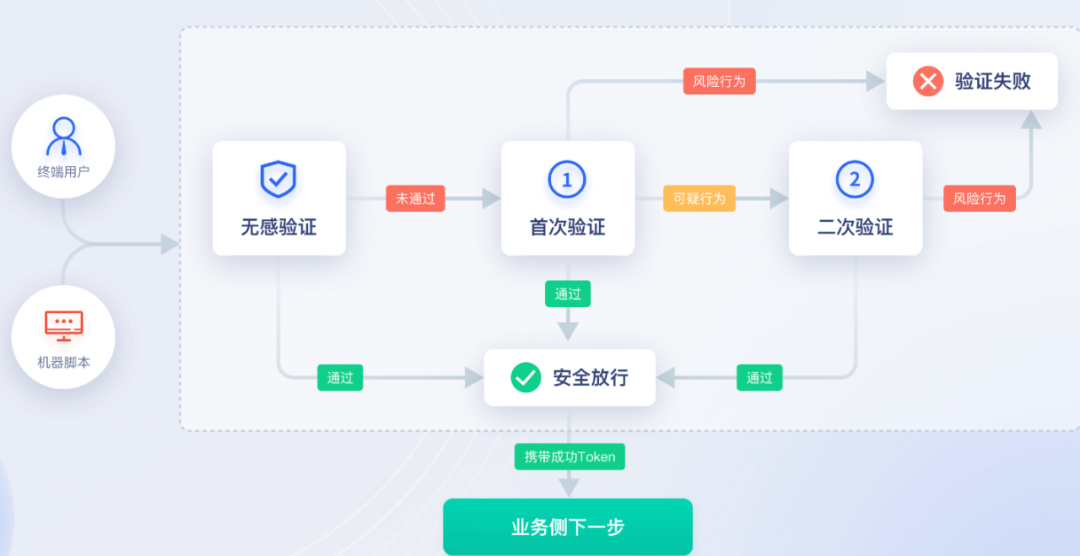
验证码安全志:AIGC+集成环境信息信息检测
目录 知己知彼,黑灰产破解验证码的过程 AIGC加持,防范黑灰产的破解 魔高一丈,黑灰产AIGC突破常规验证码 双重防护,保障验证码安全 黑灰产经常采用批量撞库方式登录用户账号,然后进行违法违规操作。 黑灰产将各种方…...
R-Meta分析教程
详情点击链接:R-Meta模型教程 一:Meta分析的选题与文献计量分析CiteSpace应用 1、Meta分析的选题与文献检索 1)什么是Meta分析? 2)Meta分析的选题策略 3)文献检索数据库 4)精确检索策略,如何检索全、检索准 5)文献的管理与…...
【3维视觉】3D空间常用算法(点到直线距离、面法线、二面角)
3D空间点到直线的距离 3D空间点到直线的距离 3D空间的曲率 三维空间有三个基本元素,点,线,面。那么曲率是如何定义的呢? 点的曲率? 线的曲率? 面的曲率? 法曲率 设曲面上的曲线在某一点处的切…...
Nodejs 第四章(Npm install 原理)
在执行npm install 的时候发生了什么? 首先安装的依赖都会存放在根目录的node_modules,默认采用扁平化的方式安装,并且排序规则.bin第一个然后系列,再然后按照首字母排序abcd等,并且使用的算法是广度优先遍历,在遍历依…...
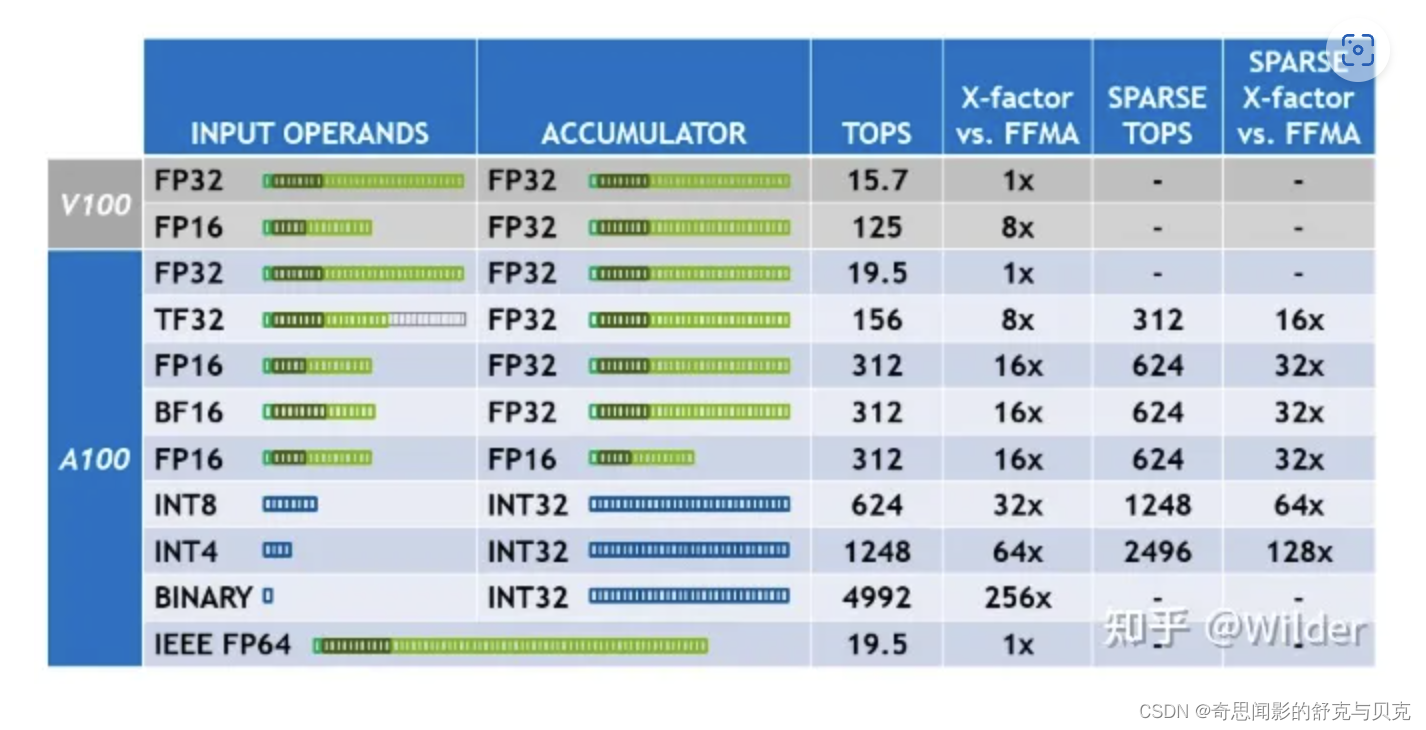
[深度学习] GPU处理能力(TFLOPS/TOPS)
计算能力换算 理论峰值 = GPU芯片数量GPU Boost主频核心数量*单个时钟周期内能处理的浮点计算次数 只不过在GPU里单精度和双精度的浮点计算能力需要分开计算,以最新的Tesla P100为例: 双精度理论峰值 = FP64 Cores *…...

js:获取浏览器默认语言
实现代码 navigator.language zh-CN参考文章 [javascript] js如何获取浏览器的语言...
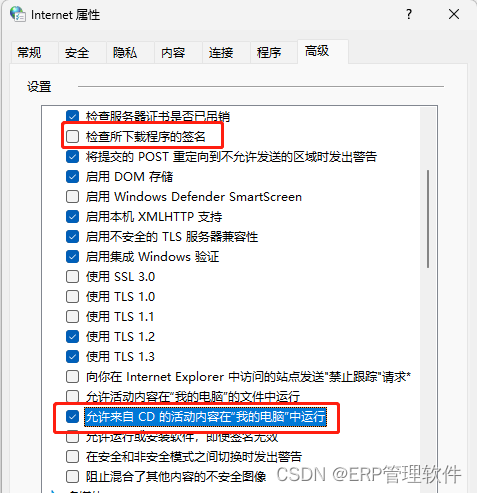
【U8+】用友U8重新注册加密锁,提示:写卡失败,请重新配置客户端控件。
【问题描述】 用友U8软件重新安装后,需要重新注册加密锁激活软件。 注册反馈提示:产品注册失败。 原因(1):写卡失败,请重新配置客户端控件。 【解决方法】 1、打开控制面板,网络和 Internet&a…...

Android 11开发避坑:为什么你的App获取的Wifi MAC地址总是变?手把手教你配置固定MAC
Android 11开发实战:彻底解决Wifi MAC地址随机化问题最近在开发一个设备管理系统时,遇到了一个棘手的问题:我们的App在Android 11设备上获取的Wifi MAC地址每次都不一样,导致基于MAC地址的设备识别功能完全失效。经过一周的深入研…...
)
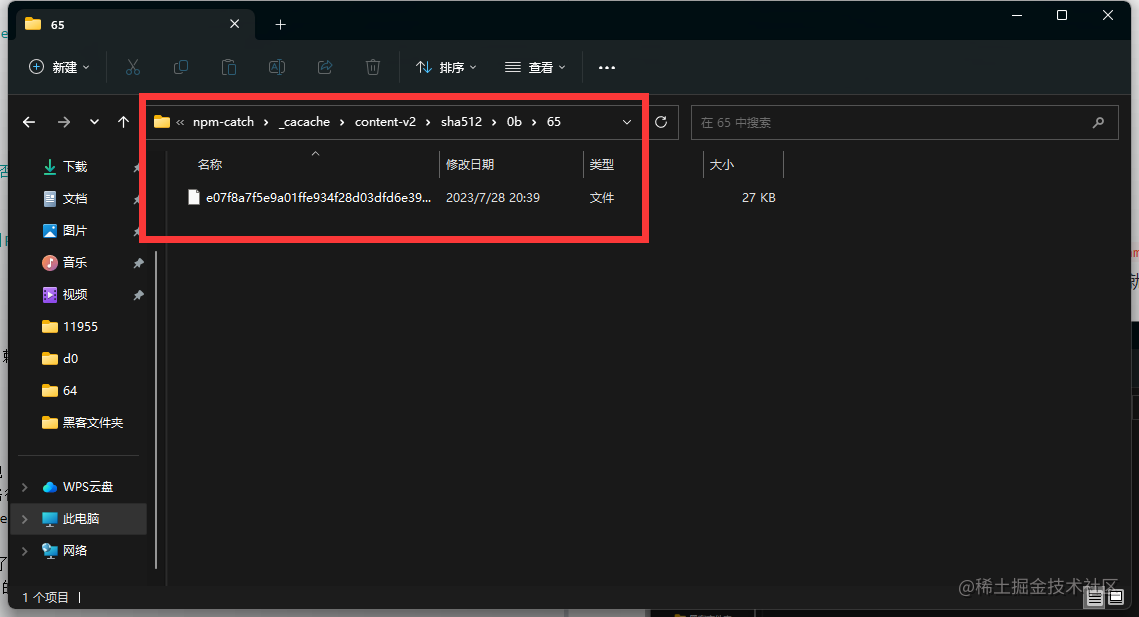
UOS系统下WPS卸载不干净?手把手教你用命令行精准清理(附dpkg/apt组合拳)
UOS系统下WPS卸载不干净?手把手教你用命令行精准清理 在UOS系统日常使用中,WPS Office作为常用办公软件,有时因版本更新或功能调整需要彻底卸载。但不少用户发现,通过图形界面或简单命令卸载后,系统中仍残留配置文件、…...

潮州东方轻奢风全屋高定找哪家
开篇引言根据《2026年中国全屋定制行业发展报告》,潮州市全屋定制市场规模同比增长38%,其中全屋高端定制细分市场同比增长52%。目前,潮州市家庭全屋定制需求占比72%,高端定制需求占比45%。为了帮助潮州市消费者选择合规、靠谱、差…...
做电影评论情感分类)
告别数据饥荒:用PyTorch手把手实现原型网络(Prototypical Networks)做电影评论情感分类
告别数据饥荒:用PyTorch手把手实现原型网络做电影评论情感分类 在自然语言处理领域,情感分析一直是热门研究方向,但现实中的开发者常面临一个尴尬困境:标注数据太少。传统深度学习方法动辄需要成千上万的标注样本,而实…...
)
GIS工程应用记录(AI辅助编程)
问题的问题:语境坍缩“从各个角度提出问题,AI做出对应积极答复和修改,结果没有什么变化。”这,就是元问题最核心的症状。你尝试了所有你已知的“高级”协作手段,但就像重拳打在棉花上,AI永远在积极回应&…...

LeagueAkari:英雄联盟终极自动化助手革命性指南
LeagueAkari:英雄联盟终极自动化助手革命性指南 【免费下载链接】League-Toolkit An all-in-one toolkit for LeagueClient. Gathering power 🚀. 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit 你是否在英雄联盟游戏中反复经历这…...
)
DeepSeek代码风格检查避坑指南(内部审计报告首次披露:37个被忽略的合规红线)
更多请点击: https://intelliparadigm.com 第一章:DeepSeek代码风格检查的合规性本质与审计背景 DeepSeek代码风格检查并非单纯的技术偏好约束,而是嵌入研发治理链条中的合规性控制节点。其本质是将编程实践与组织级安全策略、行业监管要求&…...

抖音内容批量下载实战:从零开始构建个人视频资料库
抖音内容批量下载实战:从零开始构建个人视频资料库 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback support.…...
提升你的图表专业度?)
从科研图表到商业报表:如何用Matplotlib的legend()提升你的图表专业度?
从科研图表到商业报表:如何用Matplotlib的legend()提升你的图表专业度? 在数据驱动的决策时代,图表不仅是科研论文中的证据载体,更是商业汇报中的说服工具。我曾见证一位生物统计学家将同一组临床试验数据呈现给三种不同受众&…...

Burp抓包失败的五大隐形墙与HTTPS解密断裂点排查指南
1. 这不是Burp用得不对,是环境链路断在了你没看见的地方“Burp抓不到包”——这句话我过去三年里听开发、测试、刚转安全的新人说了不下两百遍。但真正打开Burp一看,Proxy标签页里空空如也,连个localhost:8080的请求都没有,十有八…...