stm32和python串口数据收发
1-1 串口发送端(stm32)
1字符串发送
void USART_SendData(USART_TypeDef* USARTx, uint16_t Data)
{/* Check the parameters */assert_param(IS_USART_ALL_PERIPH(USARTx));assert_param(IS_USART_DATA(Data)); /* Transmit Data */USARTx->DR = (Data & (uint16_t)0x01FF);
}
/***************** 发送一个字符 **********************/
void Usart_SendByte( USART_TypeDef * pUSARTx, uint8_t ch)
{/* 发送一个字节数据到USART */USART_SendData(pUSARTx,ch);/* 等待发送数据寄存器为空 */while (USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET);
}/***************** 发送字符串 **********************/
void Usart_SendString( USART_TypeDef * pUSARTx, char *str)
{unsigned int k=0;do {Usart_SendByte( pUSARTx, *(str + k) );k++;} while(*(str + k)!='\0');/* 等待发送完成 */while(USART_GetFlagStatus(pUSARTx,USART_FLAG_TC)==RESET){}
}
/************状态:电机速度、位置和角位移传感器的速度、位置*****************/ #define LPF(x, f, c) (c*x + (1-c)*f) // 滤波motor_position = Read_Encoder_Angle(Encoder);sensor_position = Get_Adc_Average_Angle(Adc);motor_velocity = Read_Encoder_Speed(Encoder);sensor_velocity = Get_Adc_Average_Speed();pc_fil = LPF(motor_position, pc_fil,0.2f); vc_fil = LPF(motor_velocity, vc_fil,0.2f);ec_fil = LPF(sensor_position,ec_fil,0.2f);wc_fil = LPF(sensor_velocity,wc_fil,0.2f);/************** 串口发送数据方式一:使用字符串传输数据(整型和浮点型) **********************/ sprintf(data_str, "%-8.4f, %-8.4f, %-8.4f, %-8.4f\n", pc_fil, ec_fil, vc_fil, wc_fil);Usart_SendString(USART1, data_str);
2 16进制传输(整型)
/************** 串口发送数据方式二:传输数据打包-16进制传输(整型) **********************/
void USART_SendData(USART_TypeDef* USARTx, uint16_t Data)
{/* Check the parameters */assert_param(IS_USART_ALL_PERIPH(USARTx));assert_param(IS_USART_DATA(Data)); /* Transmit Data */USARTx->DR = (Data & (uint16_t)0x01FF);
}uint8_t data_array[10];data_array[0] = 0x12; // 帧头1data_array[1] = 0x34; // 帧头2data_array[2] = (int)Encoder & 0xFF; // 编码器低8位data_array[3] = ((int)Encoder >> 8) & 0xFF; // 编码器高8位data_array[4] = (int)Adc & 0xFF; // 编码器低8位data_array[5] = ((int)Adc >> 8) & 0xFF; // 编码器低8位data_array[6] = 0x56; // 帧尾1data_array[7] = 0x78; // 帧尾2for(uint8_t i = 0 ; i < 8; i++){USART_SendData(USART1, *(data_array + i));while(USART_GetFlagStatus(USART1,USART_FLAG_TC)==RESET); }3 16进制传输(整型和浮点型)
void USART_SendData(USART_TypeDef* USARTx, uint16_t Data)
{/* Check the parameters */assert_param(IS_USART_ALL_PERIPH(USARTx));assert_param(IS_USART_DATA(Data)); /* Transmit Data */USARTx->DR = (Data & (uint16_t)0x01FF);
}
/************** 串口发送数据方式三: 串口传输数据打包-16进制传输(整型和浮点型) **********************/ //函数功能:将一个浮点数转换为字节数组 倒序 大小端的问题
//入口参数:浮点数 字节数组
void FloatToByte(float floatNum, unsigned char* byteArry) {char* pchar = (char*)&floatNum;for (int i = 0; i < sizeof(float); i++) {*byteArry = *pchar;pchar++;byteArry++;}
}FloatToByte(motor_velocity, byteArry); // 8个字节数据data_array[0] = 0x12; // 帧头1data_array[1] = 0x34; // 帧头2data_array[2] = (int)motor_position & 0xFF; // 电机位置低字节data_array[3] = ((int)motor_position >> 8) & 0xFF; // 电机位置高字节/*电机速度为浮点型数据,将其十进制数转换为单精度浮点数是4个字节(32位),转换网站:http://www.styb.cn/cms/ieee_754.php*/data_array[4] = byteArry[0]; // 单精度浮点数第4个字节 data_array[5] = byteArry[1]; // 单精度浮点数第3个字节 data_array[6] = byteArry[2]; // 单精度浮点数第2个字节 data_array[7] = byteArry[3]; // 单精度浮点数第1个字节 data_array[8] = 0x56; // 帧尾1data_array[9] = 0x78; // 帧尾2for(uint8_t i = 0 ; i < sizeof(data_array); i++) // 一个字节一个字节发送数据{USART_SendData(USART1, *(data_array + i));while(USART_GetFlagStatus(USART1,USART_FLAG_TC)==RESET); // 注意:此句是为防止数据还来不及发送,数据就被后面来的数据覆盖;等待发送完后继续发送下一个数据,没有过多的等待。}
4 仅发送浮点型小数
/**************串口发送数据方式四: 仅发送浮点型小数 **********************/
void USART_SendData(USART_TypeDef* USARTx, uint16_t Data)
{/* Check the parameters */assert_param(IS_USART_ALL_PERIPH(USARTx));assert_param(IS_USART_DATA(Data)); /* Transmit Data */USARTx->DR = (Data & (uint16_t)0x01FF);
}//函数功能:将一个浮点数转换为字节数组 倒序 大小端的问题
//入口参数:浮点数 字节数组
void FloatToByte(float floatNum, unsigned char* byteArry) {char* pchar = (char*)&floatNum;for (int i = 0; i < sizeof(float); i++) {*byteArry = *pchar;pchar++;byteArry++;}
}
FloatToByte(motor_velocity, byteArry); // 8个字节数据
for(uint8_t i = 0 ; i < sizeof(float); i++) // 一个字节一个字节发送数据
{USART_SendData(USART1, *(byteArry + i));while(USART_GetFlagStatus(USART1,USART_FLAG_TC)==RESET); // 注意:此句是为防止数据还来不及发送,数据就被后面来的数据覆盖;等待发送完后继续发送下一个数据,没有过多的等待。
}
1-2 串口接收端-python
接收数据:编码器(整型)、角位移传感器(整型)[对应1-1中的2]
# 从串口接收的数据为:编码器(整型)、角位移传感器(整型)
def read_serial_one_data_encoder_adc(ser):global receive_resultBUF_SIZE = 8buf = bytearray([0x12, 0x34, 0x00, 0x00, 0x00, 0x00, 0x56, 0x78])c1 = ib = flag = 0while True:R = ser.read(1)# print("data", R)if R == b'':print("Read Fail")ser.close()breakc = int.from_bytes(R, byteorder='big') # 将接收的十六进制数转换为整数;注意,接收的十六进制会进行自动转换,如0x56是十六进制表示法,表示的是十进制数值86。而V是英文字母,它在ASCII码中的十进制表示是86。所以,0x56和V表示的是同一个字符。串口接收时会将0x56转化成V,它们实际上是同一个字符。if flag > 0:if ib < BUF_SIZE: # 位置标记ib要小于缓冲数组的最大值buf[ib] = c # 将接收的数据保存在缓冲数组当中ib += 1 # 位置+1if ib == 8: # 如果当前位置为8,则说明数据缓冲区已满if buf[6] == 0x56 and buf[7] == 0x78: # 判断帧尾1和2是否满足规定值Encoder = (buf[3] << 8) + buf[2] # 进行位操作。注意:buf[2]和buf[3]实际为十进制的数值,当进行位操作时,系统自动将其转换为十六进制进行位操作,最后结果仍为十进制数Adc= (buf[5] << 8) + buf[4]receive_result = [Encoder, Adc] # 返回接收结果breakelse:print("CRC Fail")flag = 0if flag == 0:if c1 == 0x12 and c == 0x34: # 判断:是否接收到的帧头1和帧头2,且帧头1和2是否连续(帧头1在帧头2前面),若满足条件则开始接收flag = 1 # 接收数据标志位ib = 2 # 标记数据缓冲数据从第3位开始,即下标为2c1 = creturn receive_result # 返回接收到的结果
接收数据:编码器(整型)、角位移传感器(浮点型)[对应1-1中的3]
# 函数功能:将一个字节数组转换为浮点数
# 入口参数: 字节数组
def Byte2Float(byteArry):floatNum = struct.unpack('f', byteArry)[0]return floatNum# 从串口接收的数据为:电机位置(整型)、电机速度(浮点型)
def read_serial_one_data_motor_position_velocity(ser):global receive_resultBUF_SIZE = 10buf = bytearray([0x12, 0x34, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x56, 0x78]) # 定义一个字节数组,用于将数据打包,进行串口传输c1 = c2 = ib = flag = 0while True:R = ser.read(1) # 从串口接收一个字节if R == b'':print("Read Fail")ser.close()breakc = int.from_bytes(R, byteorder='big') # 将接收的十六进制数转换为整数;注意,接收的十六进制会进行自动转换,如0x56是十六进制表示法,表示的是十进制数值86。而V是英文字母,它在ASCII码中的十进制表示是86。所以,0x56和V表示的是同一个字符。串口接收时会将0x56转化成V,它们实际上是同一个字符。if flag > 0:if ib < BUF_SIZE: # 位置标记ib要小于缓冲数组的最大值buf[ib] = c # 将接收的数据保存在缓冲数组当中ib += 1 # 位置+1if ib == 10: # 如果当前位置为10,则说明数据缓冲区已满if buf[8] == 0x56 and buf[9] == 0x78:motor_position = (buf[3] << 8) + buf[2]motor_veclocity = Byte2Float(buf[4:8])receive_result = [motor_position, motor_veclocity]breakelse:print("CRC Fail")flag = 0if flag == 0:if c1 == 0x12 and c == 0x34:# 判断:是否接收到的帧头1和帧头2,且帧头1和2是否连续(帧头1在帧头2前面),若满足条件则开始接收flag = 1 # 接收数据标志位ib = 2 # 标记数据缓冲数据从第3位开始,即下标为2c1 = creturn receive_result # 返回接收到的结果
2-1 串口发送端python
action = bytearray([0x12, 0x34, 0x00, 0x00, 0x00, 0x56, 0x78])
action_ = int(control_motor(result[0], result[1]))
print("action_", action_)
# 将action转化成字符串
action[0] = 0x2D # 帧头
action[1] = 0x01 # 校验位,具体未实现,用0x01替代
if action_ < 0:action[2] = 0x45 # 符号位action[3] = action_ & 0xFF # 数据位action[4] = (action_ >>8) & 0xFF # 数据位action[5] = 0x0d # 0x56是十六进制表示法,表示的是十进制数值86。而V是英文字母,它在ASCII码中的十进制表示是86。所以,0x56和V表示的是同一个字符。action[6] = 0x0a # 0x78是十六进制表示法,表示的是十进制数值120。而x是英文字母,它在ASCII码中的十进制表示是120。所以,0x78和x表示的是同一个字符。for byte in action: # 一个一个字节发送 ,一次发送多个字节容易出错ser.write(byte.to_bytes(1, 'big'))
2-2 串口接收端stm32
void USART1_IRQHandler(void) //串口1中断服务程序{if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断(接收到的数据必须是0x0d 0x0a结尾){Res = USART_ReceiveData(USART1); //读取接收到的数据 0x2D,0x01,0x30,0x30,0x30,0x0D,0x0Aprintf("%02X", Res);if((USART_RX_STA&0x8000)==0)//接收未完成。当接收完成时,最高位会被置为1,表示接收结束。 {if(USART_RX_STA&0x4000)//接收到了0x0D,开始执行以下代码。USART_RX_STA&0x4000判断USART_RX_STA的第14位(bit 14)是否为1。{if(Res!=0x0A){USART_RX_STA=0;//接收错误,重新开始memset(USART_RX_BUF,0,USART_REC_LEN);// 将数据缓冲区清0}else{ //接收到了0x0A,开始执行以下代码USART_RX_STA|=0x8000; //接收完成了。将 USART_RX_STA 的第15位设置为1。这样做的目的是在接收到完整的数据时,将接收完成标志置为1,以便后续的处理程序可以知道数据已经接收完成,进行后序操作。if(USART_RX_BUF[0] == 0x2D && USART_RX_BUF[1] == 0x01 ) // 判断帧头是否正确、判断奇偶校验位是否正确 || USART_RX_BUF[1] == 0x01(USART_RX_BUF[1]为校验位,此处未定义,使用0x01替代,简化){float value = 0;int16_t sign = 1; // 符号标记,默认为‘+’if(USART_RX_BUF[2] == 0x45) // USART_RX_BUF[2]为符号位,当其等于0x45,即‘-’,表示其为负数{sign = -1;}value = (USART_RX_BUF[4] << 8) + USART_RX_BUF[3];// 将接收的十六进制数转换为十进制 action = sign * value; // 与符号标记做乘法,等到真实值USART_RX_STA = 0; memset(USART_RX_BUF,0,USART_REC_LEN); // 将数据缓冲区清0}else{USART_RX_STA = 0; memset(USART_RX_BUF,0,USART_REC_LEN);// 将数据缓冲区清0}} }else //还没收到0X0D{ if(Res==0x0D)USART_RX_STA|=0x4000; //当接收缓冲区溢出时,第14位会被置为1,表示接收缓冲区已满。|0x4000 = 0100 0000 0000 0000else{ USART_RX_BUF[USART_RX_STA&0X3FFF]=Res; // 将接收到的值存放在数据缓冲区中,和0X3FFF(16383)进行与运算。这样做的目的是将索引值限制在0到16383之间,避免超出数组的范围。USART_RX_STA++; // 一个16位的无符号整数变量,用于接收数据的状态变量。// USART_RX_STA 的第15位通常用于表示接收完成标志。if(USART_RX_STA>(USART_REC_LEN-1)) // 接收数据的状态变量USART_RX_STA > 串口接收长度USART_REC_LEN时,则接收数据错误,重新开始接收{USART_RX_STA=0;//接收数据的状态变量归0memset(USART_RX_BUF,0,USART_REC_LEN); // 清空接收数据缓冲区USART_RX_BUF} } }}}
}调试过程中的问题总结
1、串口传输数据需按字节传输,不可一次性发送多个字节,如下所示:
action = bytearray([0x12, 0x34, 0x31, 0x32, 0x00, 0x56, 0x78])
ser.write(action )
在实际调试过程中,因为数据还来不及发送,数据就被后面来的数据覆盖了,导致实际接收的结果为0x12, 0x34,或0x12, 0x34, 0x32, 0x78。总之数据不完整。
因此改为每次发送一个字节,如下所示:
action = bytearray([0x12, 0x34, 0x31, 0x32, 0x00, 0x56, 0x78])
for byte in action: ser.write(byte.to_bytes(1, 'big'))
2、串口接收数据丢失,如发送固定数据为6900,偶尔会跳变为244或1等其他数据
经排查,此类情况为波特率设置过低导致的,将波特率设为较大值可解决此类情况。
相关文章:

stm32和python串口数据收发
1-1 串口发送端(stm32) 1字符串发送 void USART_SendData(USART_TypeDef* USARTx, uint16_t Data) {/* Check the parameters */assert_param(IS_USART_ALL_PERIPH(USARTx));assert_param(IS_USART_DATA(Data)); /* Transmit Data */USARTx->DR (D…...

无涯教程-jQuery - Dropable移动函数
Drop-able 功能可与JqueryUI中的交互一起使用。此功能可在任何DOM元素上启用可放置功能。 Drop able - 语法 $( "#droppable" ).droppable(); Drop able - 示例 以下是一个简单的示例,显示了drop-able的用法- <html><head><title>…...
【Python】Web学习笔记_flask(4)——钩子函数
钩子函数可以用来注册在请求处理的不同阶段执行出 Flask的请求钩子指的是在执行视图函数前后执行的一些函数, 之前是有4种,但是 before_first_request已经被删除了,使用时会报错 before_request:在每次请求前执行,…...

JavaScript 原型链解析,宏任务和微任务
目录 什么是原型链? 原型与构造函数 原型链的工作原理 实例:理解原型链 宏任务(Macro Task) 微任务(Micro Task) 什么是原型链? JavaScript 是一门基于原型的语言,而原型链是…...

05|Oracle学习(UNIQUE约束)
1. UNIQUE约束介绍 也叫:唯一键约束,用于限定数据表中字段值的唯一性。 1.1 UNIQUE和primary key区别: 主键/联合主键每张表中只有一个。UNIQUE约束可以在一张表中,多个字段中存在。例如:学生的电话、身份证号都是…...
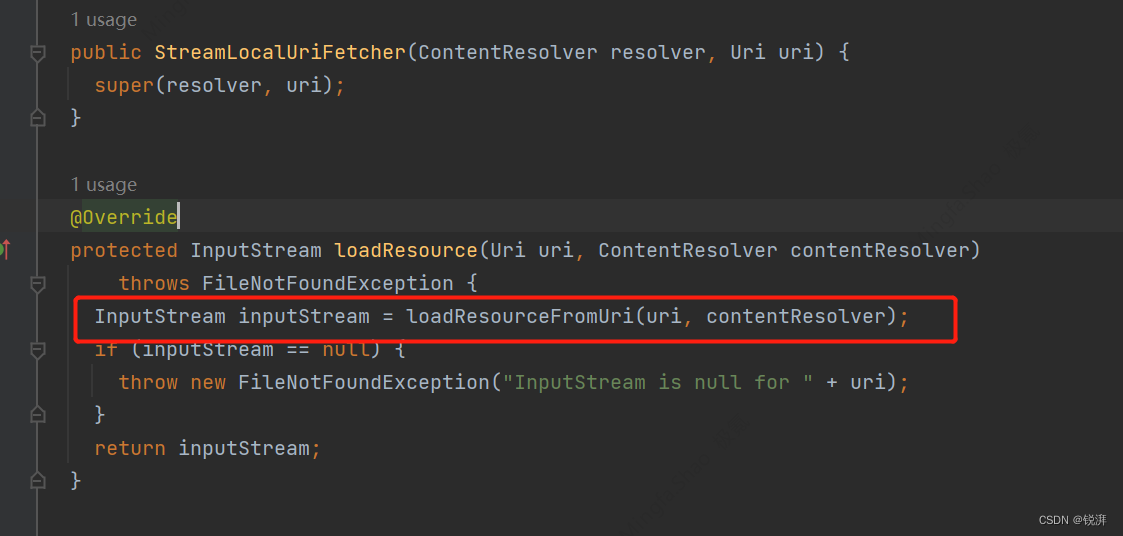
glide加载content://com.android.contacts图片源码粗略梳理
获取链路是这样的; UriLoader类里定义了协议头: 里面有个内部类StreamFactory: 通过StreamLocalUriFetcher类的loadResource方法获取InputStream然后把流转换成为图片; 在这里作个草稿笔记给自己看...
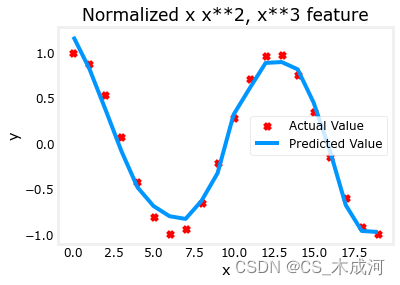
【机器学习】Feature Engineering and Polynomial Regression
Feature Engineering and Polynomial Regression 1. 多项式特征2. 选择特征3. 缩放特征4. 复杂函数附录 首先,导入所需的库: import numpy as np import matplotlib.pyplot as plt from lab_utils_multi import zscore_normalize_features, run_gradien…...

Rust- 变量绑定
In Rust, you bind values to a variable name using the let keyword. This is often referred to as “variable binding” because it’s like binding a name to a value. Here’s a simple example: let x 5;In this example, x is bound to the value 5. By default, …...
向“数”而“深”,联想凌拓的“破局求变”底气何来?
前言:要赢得更多机遇,“破局求变”尤为重要。 【全球存储观察 | 热点关注】2019年2月25日,承袭联想集团与NetApp的“双基因”,联想凌拓正式成立。历经四年多的发展,联想凌拓已成为中国企业级数据管理领域的…...
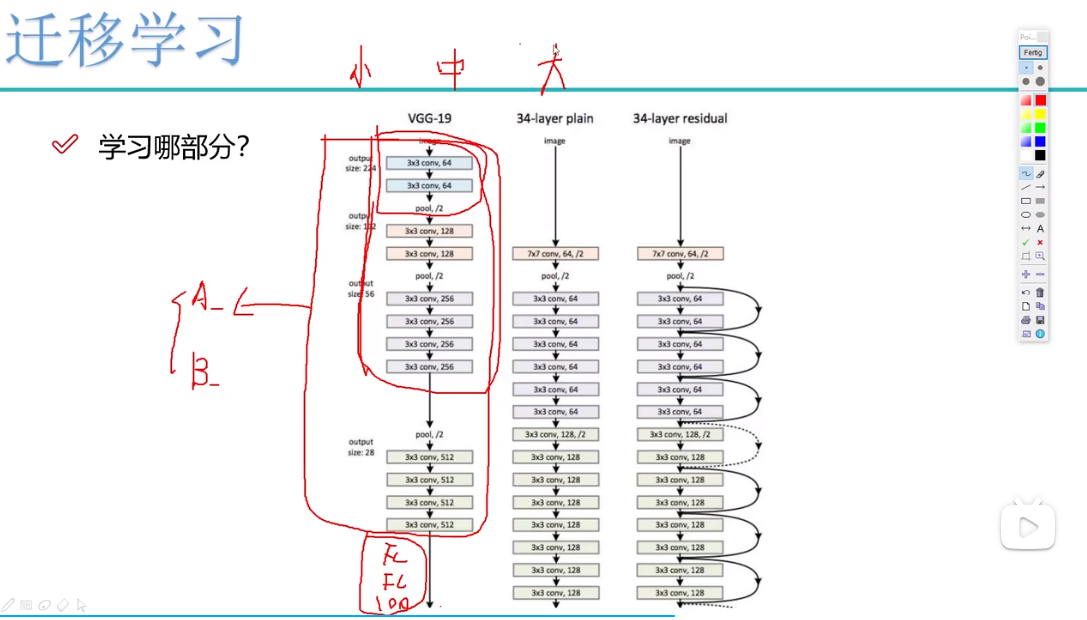
pytorch实战-图像分类(二)(模型训练及验证)(基于迁移学习(理解+代码))
目录 1.迁移学习概念 2.数据预处理 3.训练模型(基于迁移学习) 3.1选择网络,这里用resnet 3.2如果用GPU训练,需要加入以下代码 3.3卷积层冻结模块 3.4加载resnet152模 3.5解释initialize_model函数 3.6迁移学习网络搭建 3.…...
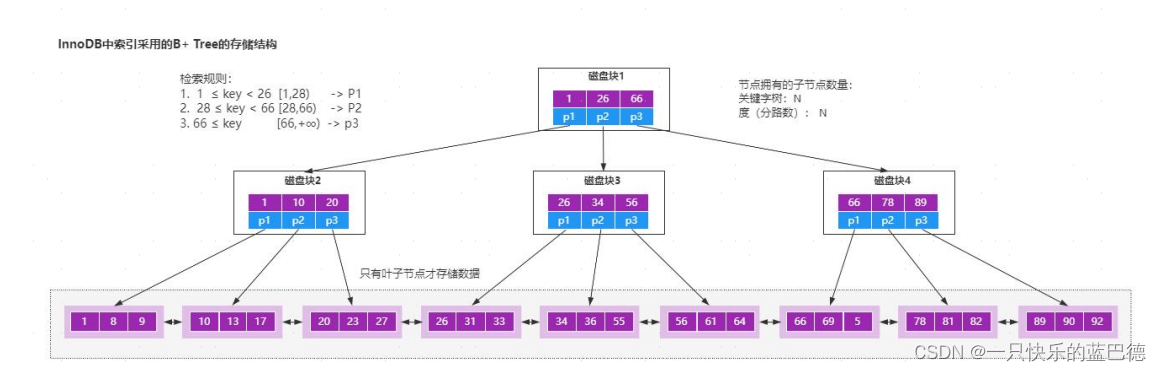
b 树和 b+树的理解
项目场景: 图灵奖获得者(Niklaus Wirth )说过: 程序 数据结构 算法, 也就说我们无时无刻 都在和数据结构打交道。 只是作为 Java 开发,由于技术体系的成熟度较高,使得大部分人认为࿱…...

正则表达式 —— Awk
Awk awk:文本三剑客之一,是功能最强大的文本工具 awk也是按行来进行操作,对行操作完之后,可以根据指定命令来对行取列 awk的分隔符,默认分隔符是空格或tab键,多个空格会压缩成一个 awk的用法 awk的格式…...

国芯新作 | 四核Cortex-A53@1.4GHz,仅168元起?含税?哇!!!
创龙科技SOM-TLT507是一款基于全志科技T507-H处理器设计的4核ARM Cortex-A53全国产工业核心板,主频高达1.416GHz。核心板CPU、ROM、RAM、电源、晶振等所有元器件均采用国产工业级方案,国产化率100%。 核心板通过邮票孔连接方式引出MIPI CSI、HDMI OUT、…...
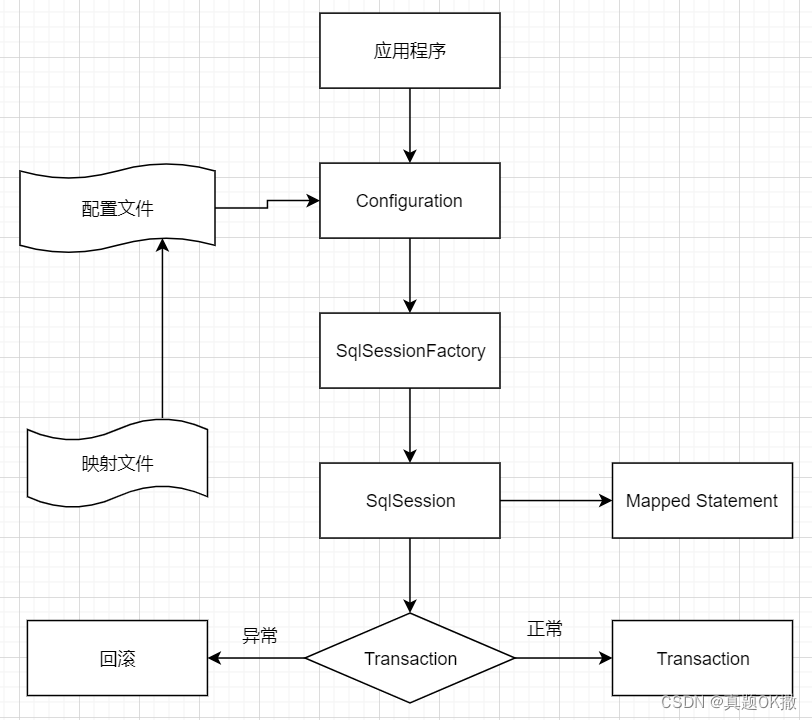
【MyBatis】 框架原理
目录 10.3【MyBatis】 框架原理 10.3.1 【MyBatis】 整体架构 10.3.2 【MyBatis】 运行原理 10.4 【MyBatis】 核心组件的生命周期 10.4.1 SqlSessionFactoryBuilder 10.4.2 SqlSessionFactory 10.4.3 SqlSession 10.4.4 Mapper Instances 与 Hibernate 框架相比&#…...
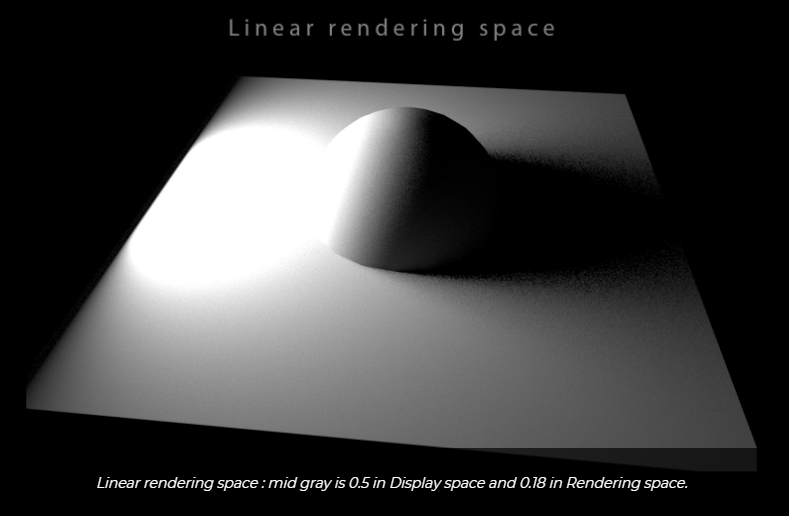
三、线性工作流
再生产的各个环节,正确使用gamma编码及gamma解码,使得最终得到的颜色数据与最初输入的物理数据一致。如果使用gamma空间的贴图,在传给着色器前需要从gamma空间转到线性空间。 如果不在线性空间下进行渲染,会产生的问题:…...
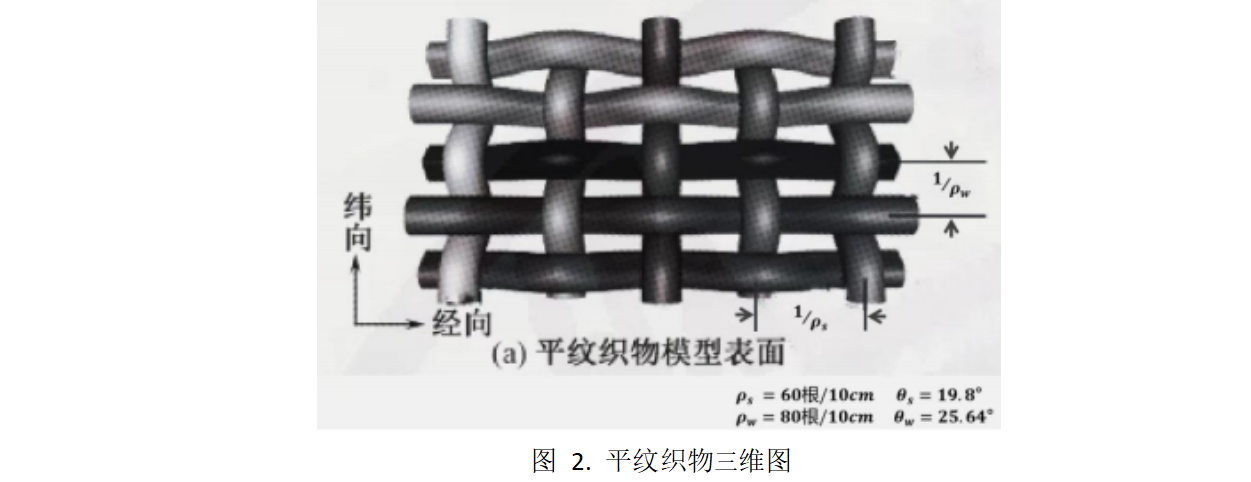
2023华数杯数学建模A题思路 - 隔热材料的结构优化控制研究
# 1 赛题 A 题 隔热材料的结构优化控制研究 新型隔热材料 A 具有优良的隔热特性,在航天、军工、石化、建筑、交通等 高科技领域中有着广泛的应用。 目前,由单根隔热材料 A 纤维编织成的织物,其热导率可以直接测出;但是 单根隔热…...
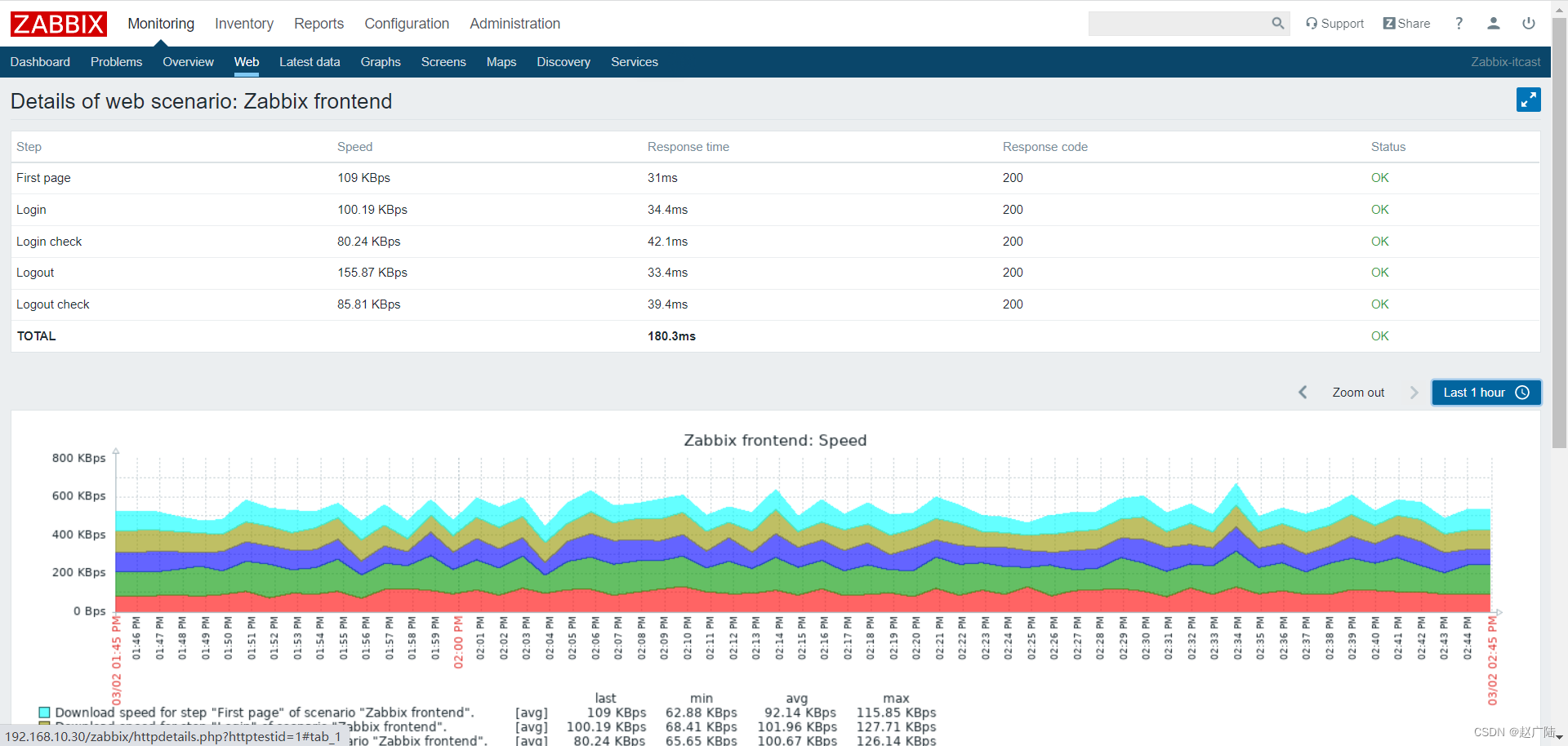
Zabbix分布式监控Web监控
目录 1 概述2 配置 Web 场景2.1 配置步骤2.2 显示 3 Web 场景步骤3.1 创建新的 Web 场景。3.2 定义场景的步骤3.3 保存配置完成的Web 监控场景。 4 Zabbix-Get的使用 1 概述 您可以使用 Zabbix 对多个网站进行可用性方面监控: 要使用 Web 监控,您需要定…...

PHP从入门到精通—PHP开发入门-PHP概述、PHP开发环境搭建、PHP开发环境搭建、第一个PHP程序、PHP开发流程
每开始学习一门语言,都要了解这门语言和进行开发环境的搭建。同样,学生开始PHP学习之前,首先要了解这门语言的历史、语言优势等内容以及了解开发环境的搭建。 PHP概述 认识PHP PHP最初是由Rasmus Lerdorf于1994年为了维护个人网页而编写的一…...

【LeetCode-中等】722. 删除注释
题目链接 722. 删除注释 标签 字符串 步骤 Step1. 先将source合并为一个字符串进行处理,中间补上’\n’,方便后续确定注释开始、结束位置。 string combined; for (auto str : source) {combined str "\n"; }Step2. 定义数组 toDel&am…...

rust里如何判断字符串是否相等呢?
在 Rust 中,有几种方法可以判断字符串是否相等。下面是其中几种常见的方法: 使用 运算符:可以直接使用 运算符比较两个字符串是否相等。例如: fn main() {let str1 "hello";let str2 "world";if str1 …...

Linux命令:netstat
netstat 命令 基本介绍 netstat 命令用于显示网络状态,包括网络连接、路由表、接口统计等信息。它是 Linux 系统中常用的网络工具之一,用于监控网络连接和排查网络问题。 资料合集:https://pan.quark.cn/s/6fe3007c3e95、https://pan.quark.c…...

2026 年端侧 AI 加速落地,荣耀转型 AI 终端生态公司,揭秘 AI 手机迭代方向与战略布局
2026 年:端侧 AI 加速落地 2026 年,AI 正在加速从云端落地到端侧。3 月下旬,国内几大手机厂商几乎同时推送了端侧 AI 的大规模更新,把原本仅限于旗舰机的 AI 能力下放到中端和千元机市场,端侧 AI 成为大部分智能手机的…...

暗黑3终极自动化指南:D3KeyHelper图形化宏工具完整配置教程
暗黑3终极自动化指南:D3KeyHelper图形化宏工具完整配置教程 【免费下载链接】D3keyHelper D3KeyHelper是一个有图形界面,可自定义配置的暗黑3鼠标宏工具。 项目地址: https://gitcode.com/gh_mirrors/d3/D3keyHelper 暗黑破坏神3作为一款需要频繁…...

小程序渗透干货、常见登录绕过Web接口速通与挖掘思路
0x01 简介小程序作为高频业务入口,常因接口鉴权缺失、弱口令泛滥、Swagger 文档泄露等问题暗藏安全隐患。本文结合真实渗透案例,梳理小程序 Web 接口速通技巧,从弱口令登录突破、模糊查询信息泄露,到参数越权、未授权访问挖掘&…...

雨雾天锥桶识别掉点50%?YOLOv11+轻量去雾实战,召回率从42%提升至92%
一、项目背景:恶劣天气下的自动驾驶痛点 上个月在做园区自动驾驶巡检项目时,遇到了一个致命问题:晴天时道路锥桶识别准确率能到98%,但一到小雨或者大雾天,召回率直接跌到42%,经常出现漏检导致车辆撞上锥桶的…...

如何把MAX31865的精度榨干?STM32驱动PT100三线制测温的校准与优化实战
如何将MAX31865的精度发挥到极致:PT100三线制高精度测温实战指南 在工业自动化、实验室设备以及精密仪器控制领域,温度测量的准确性往往直接影响整个系统的可靠性和产品质量。MAX31865作为一款专为RTD(电阻温度检测器)设计的信号调…...

Swift学习笔记25-函数式编程
Array的常见操作//Array的常见操作 //注意:Map和FlatMap都是映射高级函数var arr [1, 2, 3, 4] //这是这块的基础 var arr2 arr.map { $0 * 2 } //每一个元素分别乘2 print(arr2)//[2, 4, 6, 8] //map:对数组的每个元素应用指定的函数,返回一个新数组。…...

【2026奇点智能技术大会权威内参】:AI重构建议的5大底层逻辑与企业落地优先级清单
第一章:AI重构建议的范式跃迁与奇点共识 2026奇点智能技术大会(https://ml-summit.org) 传统推荐系统依赖显式反馈与协同过滤,而新一代AI建议引擎正以隐式意图建模、多模态对齐与反事实推理为基石,实现从“预测用户会点什么”到“协同定义用…...
)
Jupyter Notebook代码补全插件安装踩坑实录:从nbextensions不显示到完美解决(Anaconda环境)
Jupyter Notebook代码补全插件安装踩坑实录:从nbextensions不显示到完美解决(Anaconda环境) 在数据科学和机器学习的工作流中,Jupyter Notebook因其交互式特性广受欢迎,而代码补全功能能显著提升开发效率。然而&#x…...

【限时解密】GitHub Copilot Enterprise未公开的3项性能开关:启用后P99延迟下降63%,仅限前500名开发者获取配置清单
第一章:智能代码生成性能优化技巧 2026奇点智能技术大会(https://ml-summit.org) 智能代码生成模型(如基于LLM的Copilot类工具)在实际工程落地中常面临响应延迟高、上下文吞吐低、生成结果不稳定等问题。优化其端到端性能需兼顾推理效率、缓…...