机器学习---梯度下降代码
1. 归一化
# Read data from csv
pga = pd.read_csv("pga.csv")
print(type(pga))print(pga.head())

# Normalize the data 归一化值 (x - mean) / (std)
pga.distance = (pga.distance - pga.distance.mean()) / pga.distance.std()
pga.accuracy = (pga.accuracy - pga.accuracy.mean()) / pga.accuracy.std()
print(pga.head())
plt.scatter(pga.distance, pga.accuracy)
plt.xlabel('normalized distance')
plt.ylabel('normalized accuracy')
plt.show()
2. 线性回归
from sklearn.linear_model import LinearRegression
import numpy as np# We can add a dimension to an array by using np.newaxis
print("Shape of the series:", pga.distance.shape)
print("Shape with newaxis:", pga.distance[:, np.newaxis].shape)# The X variable in LinearRegression.fit() must have 2 dimensions
lm = LinearRegression()
lm.fit(pga.distance[:, np.newaxis], pga.accuracy)
theta1 = lm.coef_[0]
print (theta1)
这段代码是一个示例,展示了如何使用np.newaxis和LinearRegression来进行线性回归。
首先,通过np.newaxis将一维数组pga.distance添加一个新的维度,从而将其转换为二维数
组。通过打印数组的形状,可以看到在添加np.newaxis之前,pga.distance是一个一维数组,形状
为(n,),而添加了np.newaxis之后,形状变为(n, 1)。
然后,创建了一个LinearRegression的实例lm。使用lm.fit()方法,将转换后的特征数据
pga.distance[:, np.newaxis]和目标数据pga.accuracy作为参数,对线性回归模型进行训练拟
合。
最后,通过lm.coef_获取训练后的模型系数(权重),并将第一个特征的系数赋值给变量
theta1。pga.distance和pga.accuracy是示例数据,你需要根据实际情况替换为你自己的数据。
3. 代价函数
# The cost function of a single variable linear model# The c
# 单变量 代价函数
def cost(theta0, theta1, x, y):# Initialize costJ = 0# The number of observationsm = len(x)# Loop through each observation# 通过每次观察进行循环for i in range(m):# Compute the hypothesis # 计算假设h = theta1 * x[i] + theta0# Add to costJ += (h - y[i])**2# Average and normalize costJ /= (2*m)return J# The cost for theta0=0 and theta1=1
print(cost(0, 1, pga.distance, pga.accuracy))theta0 = 100
theta1s = np.linspace(-3,2,100)
costs = []
for theta1 in theta1s:costs.append(cost(theta0, theta1, pga.distance, pga.accuracy))plt.plot(theta1s, costs)
plt.show()
一个简单的单变量线性回归模型的代价函数实现,并且计算了在给定一组参数theta0和theta1
的情况下的代价。在这段代码中,cost()函数接受四个参数:theta0和theta1是线性模型的参数,
x是输入特征,y是目标变量。函数的目标是计算模型的代价。
首先,初始化代价J为0。然后,通过循环遍历每个观察值,计算模型的预测值h。代价J通过累
加每个观察值的误差平方来计算。最后,将代价J除以观察值的数量的两倍,以平均和归一化代
价。在这段代码的后半部分,使用一个给定的theta0值和一组theta1值,计算每个theta1对应的代
价,并将结果存储在costs列表中。然后,使用plt.plot()将theta1s和costs进行绘制,显示出代
价函数随着theta1的变化而变化的趋势。
4. 绘制三维图
import numpy as np
from mpl_toolkits.mplot3d import Axes3D# Example of a Surface Plot using Matplotlib
# Create x an y variables
x = np.linspace(-10,10,100)
y = np.linspace(-10,10,100)# We must create variables to represent each possible pair of points in x and y
# ie. (-10, 10), (-10, -9.8), ... (0, 0), ... ,(10, 9.8), (10,9.8)
# x and y need to be transformed to 100x100 matrices to represent these coordinates
# np.meshgrid will build a coordinate matrices of x and y
X, Y = np.meshgrid(x,y)
#print(X[:5,:5],"\n",Y[:5,:5])# Compute a 3D parabola
Z = X**2 + Y**2 # Open a figure to place the plot on
fig = plt.figure()
# Initialize 3D plot
ax = fig.gca(projection='3d')
# Plot the surface
ax.plot_surface(X=X,Y=Y,Z=Z)plt.show()# Use these for your excerise
theta0s = np.linspace(-2,2,100)
theta1s = np.linspace(-2,2, 100)
COST = np.empty(shape=(100,100))
# Meshgrid for paramaters
T0S, T1S = np.meshgrid(theta0s, theta1s)
# for each parameter combination compute the cost
for i in range(100):for j in range(100):COST[i,j] = cost(T0S[0,i], T1S[j,0], pga.distance, pga.accuracy)# make 3d plot
fig2 = plt.figure()
ax = fig2.gca(projection='3d')
ax.plot_surface(X=T0S,Y=T1S,Z=COST)
plt.show() 

使用Matplotlib绘制三维图形,包括一个二次曲面图和一个代价函数的图。
首先,通过使用np.linspace()函数,创建了从-10到10的等间距的100个点,分别赋值给变量
x和y。
接下来,使用np.meshgrid()函数将x和y转换为100x100的网格矩阵,分别赋值给X和Y。这
样,X和Y矩阵中的每个元素表示一个(x, y)坐标对。
然后,根据二次曲面方程Z = X**2 + Y**2计算出Z矩阵,其中Z矩阵中的每个元素表示对应坐
标点的高度。
通过plt.figure()创建一个新的图形,并通过fig.gca(projection='3d')初始化一个三维图形
的坐标系。使用ax.plot_surface()函数绘制曲面图,其中X、Y和Z分别表示X、Y和Z矩阵。
最后,使用plt.show()显示图形。
在后半部分的代码中,首先创建了两个包含100个均匀分布数值的数组theta0s和theta1s,分
别表示theta0和theta1的取值范围。
接下来,使用np.empty()创建一个空的100x100的数组COST,用于存储代价函数的计算结果。
通过使用np.meshgrid()函数,将theta0s和theta1s转换为网格矩阵T0S和T1S。
然后,通过两个嵌套的循环遍历所有可能的参数组合,并使用cost()函数计算每个参数组合对
应的代价,并将结果存储在COST数组中。
最后,使用plt.figure()创建一个新的图形,并通过fig.gca(projection='3d')初始化一个三
维图形的坐标系。使用ax.plot_surface()函数绘制代价函数的曲面图,其中X、Y和Z分别表示
T0S、T1S和COST矩阵。使用plt.show()显示图形。
5. 求导函数
线性回归模型的偏导数公式可以通过最小化代价函数推导得到。以下是推导过程:
线性回归模型假设函数为:h(x) = theta0 + theta1 * x
代价函数为均方差函数(Mean Squared Error):J(theta0, theta1) = (1/2m) * Σ(h(x) - y)^2
其中,m 是样本数量,h(x) 是模型的预测值,y 是观测值。
为了求解最优的模型参数 theta0 和 theta1,我们需要计算代价函数对这两个参数的偏导数。
首先,计算代价函数对 theta0 的偏导数:
∂J/∂theta0 = (1/m) * Σ(h(x) - y)
然后,计算代价函数对 theta1 的偏导数:
∂J/∂theta1 = (1/m) * Σ(h(x) - y) * x
# 对 theta1 进行求导# 对 thet
def partial_cost_theta1(theta0, theta1, x, y):# Hypothesish = theta0 + theta1*x# Hypothesis minus observed times xdiff = (h - y) * x# Average to compute partial derivativepartial = diff.sum() / (x.shape[0])return partialpartial1 = partial_cost_theta1(0, 5, pga.distance, pga.accuracy)
print("partial1 =", partial1)# 对theta0 进行求导
# Partial derivative of cost in terms of theta0
def partial_cost_theta0(theta0, theta1, x, y):# Hypothesish = theta0 + theta1*x# Difference between hypothesis and observationdiff = (h - y)# Compute partial derivativepartial = diff.sum() / (x.shape[0])return partialpartial0 = partial_cost_theta0(1, 1, pga.distance, pga.accuracy)
print("partial0 =", partial0)
计算代价函数对参数theta1和theta0的偏导数。
首先,定义了一个名为partial_cost_theta1()的函数,接受四个参数:theta0和theta1是线
性模型的参数,x是输入特征,y是目标变量。这个函数用于计算代价函数对theta1的偏导数。在函
数内部,首先计算假设值h,然后计算(h-y)*x,得到假设值与观察值之间的差异乘以输入特征x。
最后,将这些差异的和除以输入特征的数量,得到对theta1的偏导数。然后,通过调用
partial_cost_theta1()函数并传入参数0和5,计算出对应的偏导数partial1。
接下来,定义了一个名为partial_cost_theta0()的函数,接受四个参数:theta0和
theta1是线性模型的参数,x是输入特征,y是目标变量。这个函数用于计算代价函数对theta0的偏
导数。在函数内部,首先计算假设值h,然后计算假设值与观察值之间的差异。最后,将这些差异
的和除以输入特征的数量,得到对theta0的偏导数。然后,通过调用partial_cost_theta0()函数
并传入参数1和1,计算出对应的偏导数partial0。
6. 梯度下降
# x is our feature vector -- distance
# y is our target variable -- accuracy
# alpha is the learning rate
# theta0 is the intial theta0
# theta1 is the intial theta1
def gradient_descent(x, y, alpha=0.1, theta0=0, theta1=0):max_epochs = 1000 # Maximum number of iterations 最大迭代次数counter = 0 # Intialize a counter 当前第几次c = cost(theta1, theta0, pga.distance, pga.accuracy) ## Initial cost 当前代价函数costs = [c] # Lets store each update 每次损失值都记录下来# Set a convergence threshold to find where the cost function in minimized# When the difference between the previous cost and current cost # is less than this value we will say the parameters converged# 设置一个收敛的阈值 (两次迭代目标函数值相差没有相差多少,就可以停止了)convergence_thres = 0.000001 cprev = c + 10 theta0s = [theta0]theta1s = [theta1]# When the costs converge or we hit a large number of iterations will we stop updating# 两次间隔迭代目标函数值相差没有相差多少(说明可以停止了)while (np.abs(cprev - c) > convergence_thres) and (counter < max_epochs):cprev = c# Alpha times the partial deriviative is our updated# 先求导, 导数相当于步长update0 = alpha * partial_cost_theta0(theta0, theta1, x, y)update1 = alpha * partial_cost_theta1(theta0, theta1, x, y)# Update theta0 and theta1 at the same time# We want to compute the slopes at the same set of hypothesised parameters# so we update after finding the partial derivatives# -= 梯度下降,+=梯度上升theta0 -= update0theta1 -= update1# Store thetastheta0s.append(theta0)theta1s.append(theta1)# Compute the new cost# 当前迭代之后,参数发生更新 c = cost(theta0, theta1, pga.distance, pga.accuracy)# Store updates,可以进行保存当前代价值costs.append(c)counter += 1 # Count# 将当前的theta0, theta1, costs值都返回去return {'theta0': theta0, 'theta1': theta1, "costs": costs}print("Theta0 =", gradient_descent(pga.distance, pga.accuracy)['theta0'])
print("Theta1 =", gradient_descent(pga.distance, pga.accuracy)['theta1'])
print("costs =", gradient_descent(pga.distance, pga.accuracy)['costs'])descend = gradient_descent(pga.distance, pga.accuracy, alpha=.01)
plt.scatter(range(len(descend["costs"])), descend["costs"])
plt.show()

使用梯度下降法求解线性回归模型中的偏导数以及更新参数的过程。其中,gradient_descent
函数接受输入特征 x 和观测值 y,以及学习率 alpha、初始参数 theta0 和 theta1。在函数中,设
置了最大迭代次数 max_epochs 和收敛阈值 convergence_thres,用于控制算法的停止条件。初始
时,计算了初始的代价函数值 c,并将其存储在 costs 列表中。
在迭代过程中,使用偏导数的公式进行参数更新,即 theta0 -= update0 和 theta1 -=
update1。同时,计算新的代价函数值 c,并将其存储在 costs 列表中。最后,返回更新后的参数
值 theta0 和 theta1,以及代价函数值的变化过程 costs。
最后,调用了 gradient_descent 函数,并打印了最终的参数值和代价函数值。然后,绘制了
代价函数值的变化过程图。
相关文章:
机器学习---梯度下降代码
1. 归一化 # Read data from csv pga pd.read_csv("pga.csv") print(type(pga))print(pga.head())# Normalize the data 归一化值 (x - mean) / (std) pga.distance (pga.distance - pga.distance.mean()) / pga.distance.std() pga.accuracy (pga.accuracy - pg…...
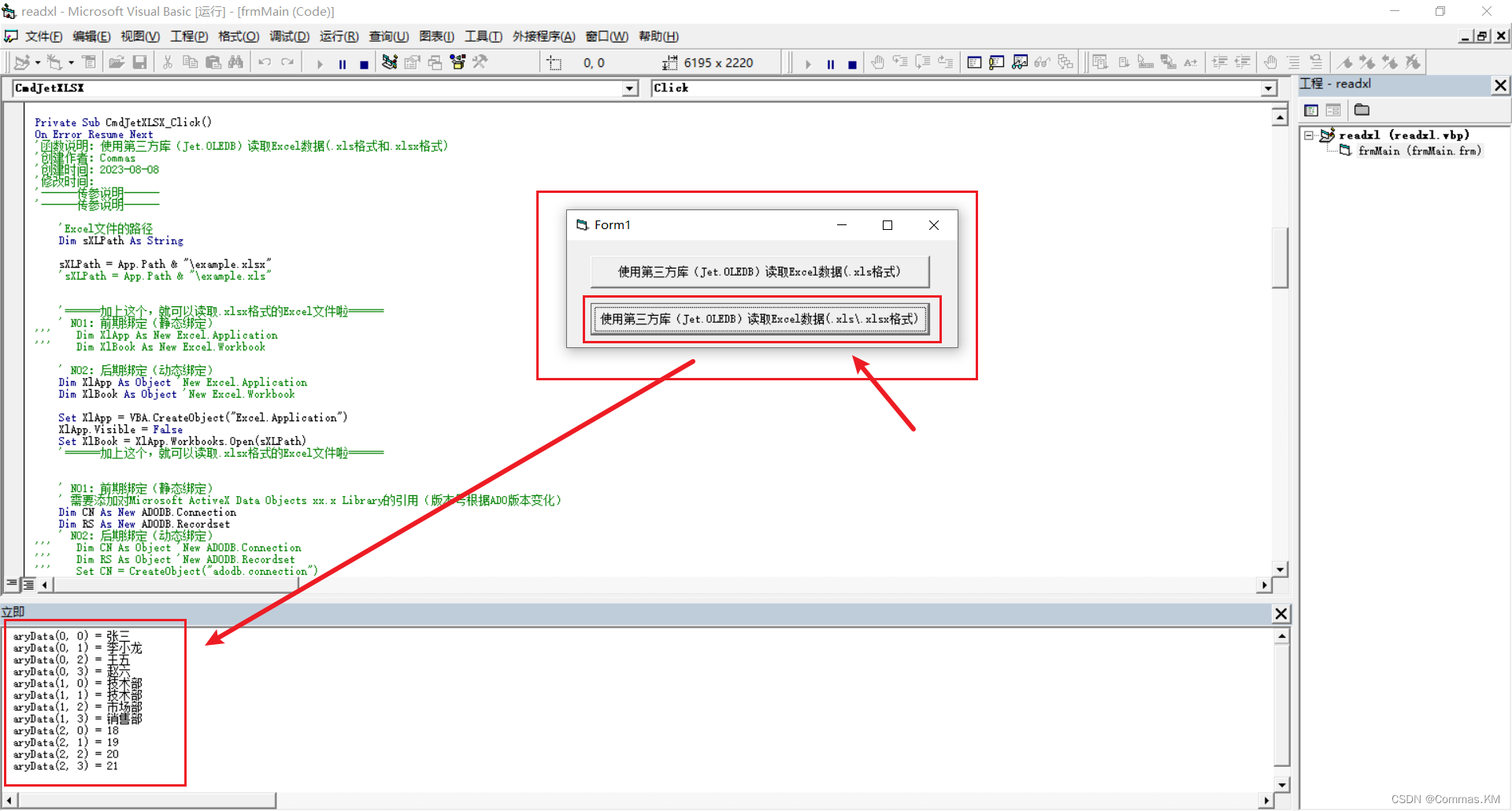
【VB6|第23期】原来Jet.OLEDB也可以读取新版.xlsx的Excel文件
日期:2023年8月11日 作者:Commas 签名:(ง •_•)ง 积跬步以致千里,积小流以成江海…… 注释:如果您觉得有所帮助,帮忙点个赞,也可以关注我,我们一起成长;如果有不对的地方…...
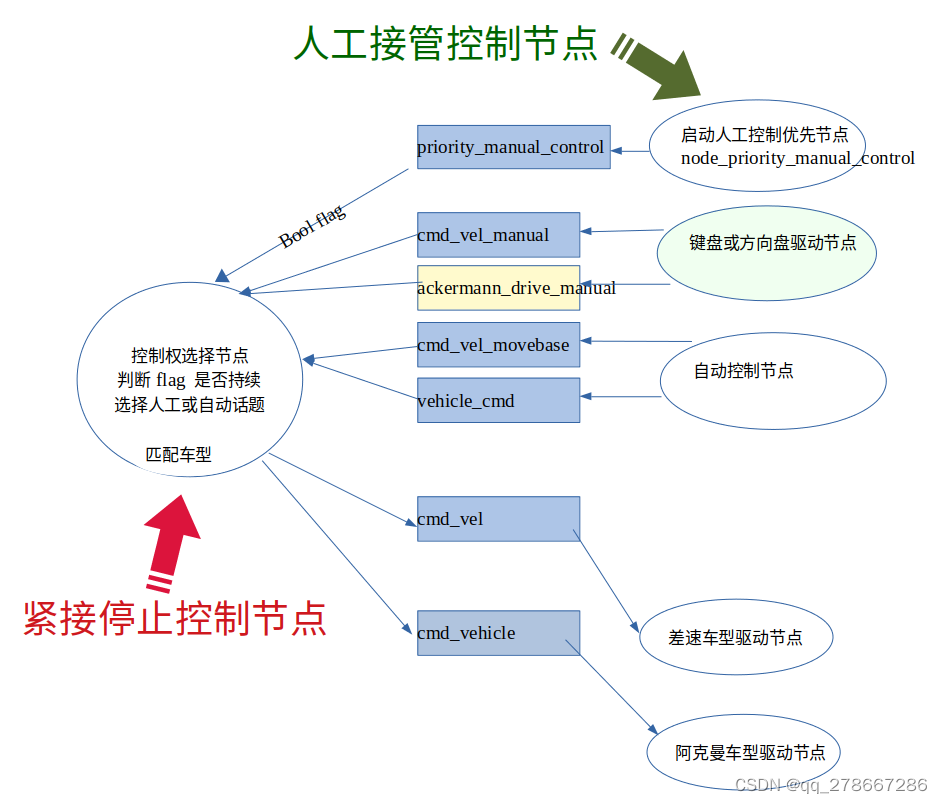
通过控制ros节点的启停,软实现人工控制和紧急停止功能的图示
通过控制ros节点的启停,软实现人工控制和紧急停止功能的图示 实现原理简介: 人工控制的节点: 键盘节点 方向盘节点 自动控制的节点: movebase 导航 autoware 等 底盘节点: 差速底盘 阿克曼底盘 控制节点࿱…...

面试热题(滑动窗口最大值)
给你一个整数数组 nums,有一个大小为 k 的滑动窗口从数组的最左侧移动到数组的最右侧。你只可以看到在滑动窗口内的 k 个数字。滑动窗口每次只向右移动一位。 返回 滑动窗口中的最大值 。 输入:nums [1,3,-1,-3,5,3,6,7], k 3 输出:[3,3,5,…...
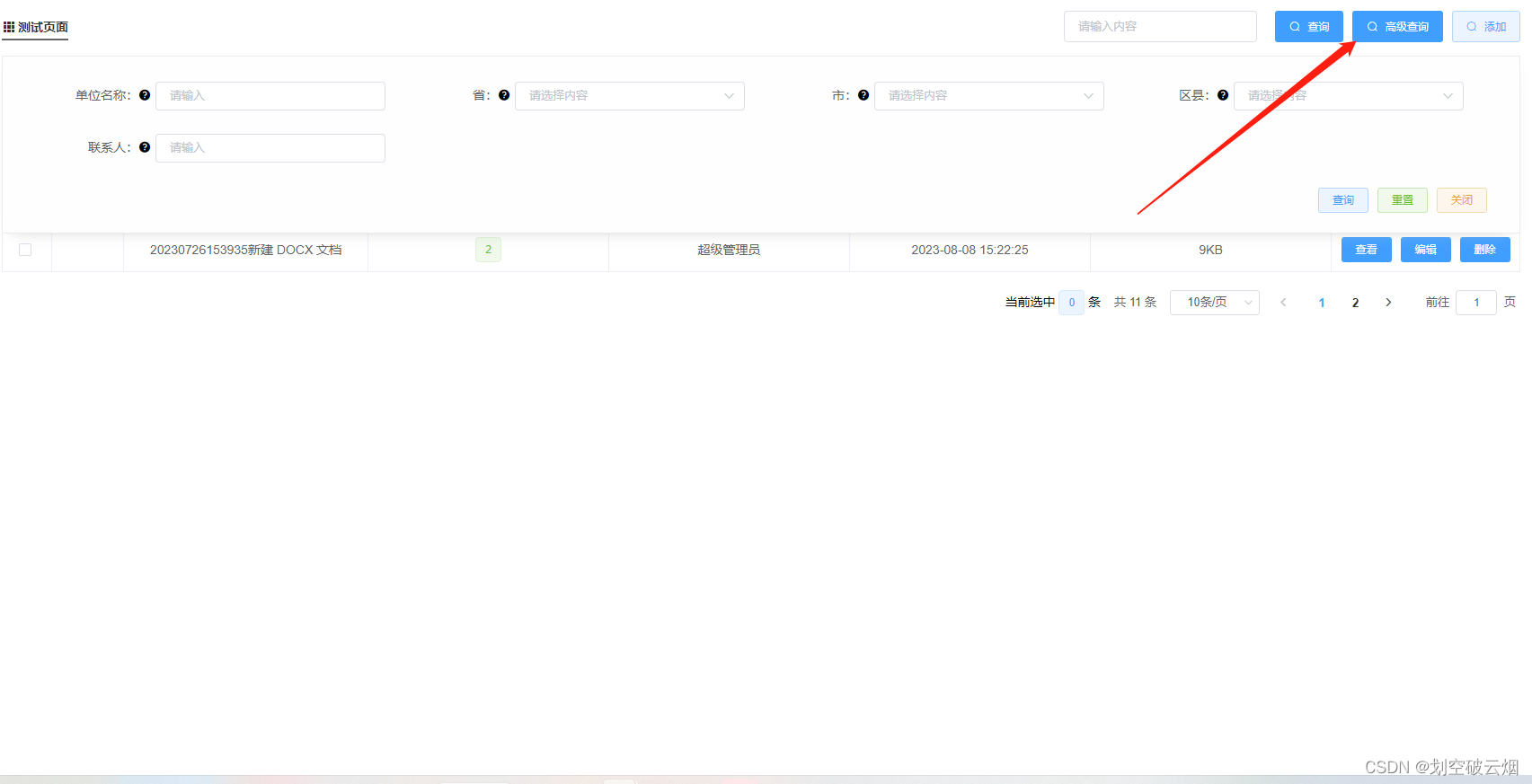
【代码】表格封装 + 高级查询 + 搜索 +分页器 (极简)
一、标题 查询条件按钮(Header) <!-- Header 标题搜索栏 --> <template><div><div class"header"><div class"h-left"><div class"title"><div class"desc-test">…...

ant.design 组件库中的 Tree 组件实现可搜索的树: React+and+ts
ant.design 组件库中的 Tree 组件实现可搜索的树,在这里我会详细介绍每个方法,以及容易踩坑的点。 效果图: 首先是要导入的文件 // React 自带的属性 import React, { useMemo, useState } from react; // antd 组件库中的,输入…...
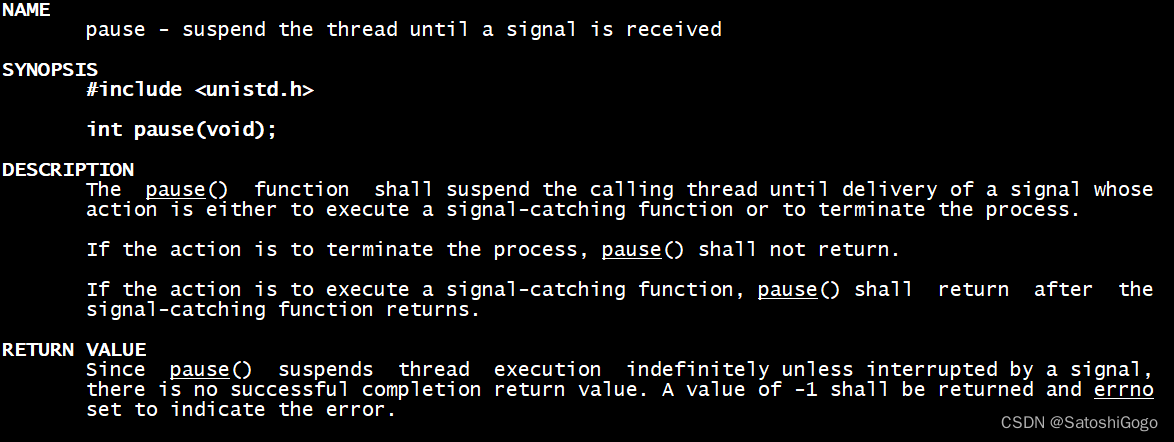
Linux系统编程之信号(上)
一、信号概念 信号就是软件中断。每当程序收到一个信号,都需要按指定的方法去处理。以下是UNIX系统的信号表。 其中core表示产生一个复制了该进程内存映像的core文件,它保存了程序现场,可以使用gdb来调试。 二、signal() signal()函数用于改…...

23.Netty源码之内置解码器
highlight: arduino-light Netty内置的解码器 在前两节课我们介绍了 TCP 拆包/粘包的问题,以及如何使用 Netty 实现自定义协议的编解码。可以看到,网络通信的底层实现,Netty 都已经帮我们封装好了,我们只需要扩展 ChannelHandler …...
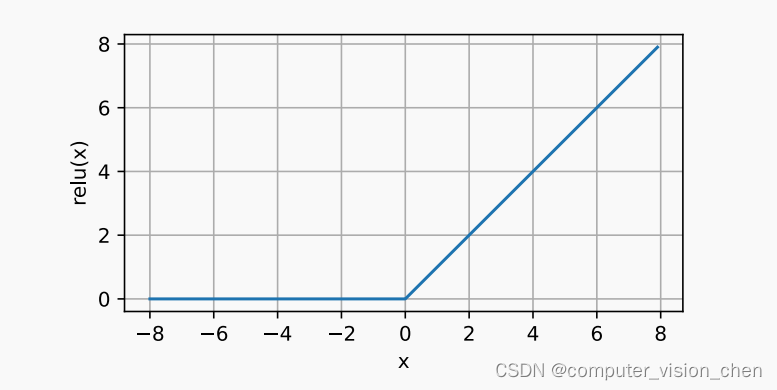
sigmoid ReLU 等激活函数总结
sigmoid ReLU sigoid和ReLU对比 1.sigmoid有梯度消失问题:当sigmoid的输出非常接近0或者1时,区域的梯度几乎为0,而ReLU在正区间的梯度总为1。如果Sigmoid没有正确初始化,它可能在正区间得到几乎为0的梯度。使模型无法有效训练。 …...

RabbitMQ 消息队列
文章目录 🍰有几个原因可以解释为什么要选择 RabbitMQ:🥩mq之间的对比🌽RabbitMQ vs Apache Kafka🌽RabbitMQ vs ActiveMQ🌽RabbitMQ vs RocketMQ🌽RabbitMQ vs Redis 🥩linux docke…...
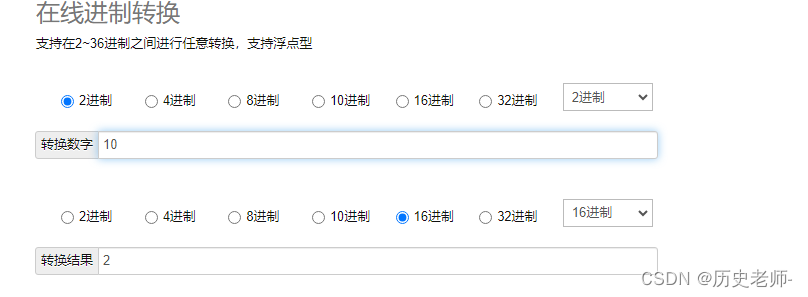
PHP实现在线进制转换器,10进制,2、4、8、16、32进制转换
1.接口文档 2.laravel实现代码 /*** 进制转换计算器* return \Illuminate\Http\JsonResponse*/public function binaryConvertCal(){$ten $this->request(ten);$two $this->request(two);$four $this->request(four);$eight $this->request(eight);$sixteen …...

报错 | Spring报错详解
Spring报错详解 一、前言二、报错提示三、分层解读1.最下面一层Caused by2.上一层Caused by3.最上层Caused by 四、总结五、解决方案 一、前言 本文主要是记录在初次学习Spring时遇到报错后的解读以及解决方案 二、报错提示 三、分层解读 遇到报错的时候,我们需要…...

PHP最简单自定义自己的框架数据库封装调用(五)
1、实现效果调用实现数据增删改查封装 2、index.php 入口定义数据库账号密码 <?php//定义当前请求模块 define("MODULE",index);//定义数据库 define(DB_HOST,localhost);//数据库地址 define(DB_DATABASE,aaa);//数据库 define(DB_USER,root);//数据库账号 def…...

使用Redis来实现点赞功能的基本思路
使用Redis来实现点赞功能是一种高效的选择,因为Redis是一个内存数据库,适用于处理高并发的数据操作。以下是一个基本的点赞功能在Redis中的设计示例: 假设我们有一个文章或帖子,用户可以对其进行点赞,取消点赞&#x…...

【黑马头条之app端文章搜索ES-MongoDB】
本笔记内容为黑马头条项目的app端文章搜索部分 目录 一、今日内容介绍 1、App端搜索-效果图 2、今日内容 二、搭建ElasticSearch环境 1、拉取镜像 2、创建容器 3、配置中文分词器 ik 4、使用postman测试 三、app端文章搜索 1、需求分析 2、思路分析 3、创建索引和…...

Nginx安装以及LVS-DR集群搭建
Nginx安装 1.环境准备 yum insatall -y make gcc gcc-c pcre-devel #pcre-devel -- pcre库 #安装openssl-devel yum install -y openssl-devel 2.tar安装包 3.解压软件包并创建软连接 tar -xf nginx-1.22.0.tar.gz -C /usr/local/ ln -s /usr/local/nginx-1.22.0/ /usr/local…...
后端开发9.商品类型模块
概述 简介 商品类型我设计的复杂了点,设计了多级类型 效果图 数据库设计...

spring框架自带的http工具RestTemplate用法
1. RestTemplate是什么? RestTemplate是由Spring框架提供的一个可用于应用中调用rest服务的类它简化了与http服务的通信方式。 RestTemplate是一个执行HTTP请求的同步阻塞式工具类,它仅仅只是在 HTTP 客户端库(例如 JDK HttpURLConnection&a…...
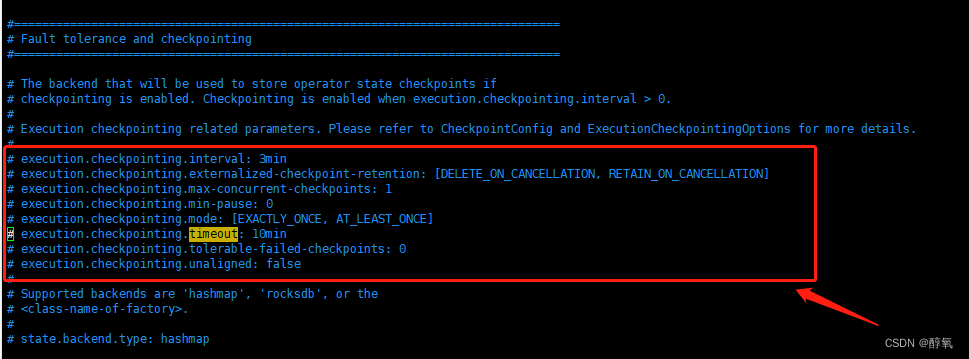
【flink】Checkpoint expired before completing.
使用flink同步数据出现错误Checkpoint expired before completing. 11:32:34,455 WARN org.apache.flink.runtime.checkpoint.CheckpointFailureManager [Checkpoint Timer] - Failed to trigger or complete checkpoint 4 for job 1b1d41031ea45d15bdb3324004c2d749. (2 con…...
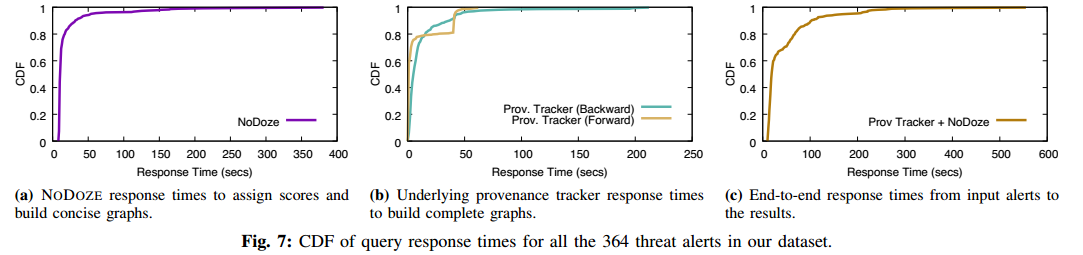
【论文阅读】NoDoze:使用自动来源分类对抗威胁警报疲劳(NDSS-2019)
NODOZE: Combatting Threat Alert Fatigue with Automated Provenance Triage 伊利诺伊大学芝加哥分校 Hassan W U, Guo S, Li D, et al. Nodoze: Combatting threat alert fatigue with automated provenance triage[C]//network and distributed systems security symposium.…...

如何轻松地将短信从 OnePlus 传输到 iPhone?
从一加这样的Android设备换 到 iPhone固然令人兴奋,但重要的短信怎么办呢?许多用户担心在换机过程中丢失短信历史记录。好在有几种方法可以让你安全高效地将短信从一加转移到 iPhone。本指南将引导你了解一些行之有效的解决方案。第 1 部分。如何通过移动…...

CTF-MISC工具箱盘点:Steghide、010 Editor、Python脚本...这些工具如何帮你拿下‘神奇的压缩包’和‘李华的身份证’?
CTF-MISC实战工具箱:从隐写到爆破的自动化艺术 在CTF竞赛的MISC(杂项)领域,工具链的熟练程度往往决定了解题速度的上限。当面对一个看似无解的压缩包、一张隐藏关键信息的图片,或是一串意义不明的加密字符串时…...

智能制造系统推广的核心的十个关键问题
推广智能制造系统(尤其是迈向资产共生阶段)时,不能只关注设备买入,急须解决以下十个关乎“成败”的核心问题:数据孤岛与协议兼容问题:底层设备品牌庞杂(Fanuc, Siemens, Omron 等)&a…...
开始:手把手教你用STM32的DSP库做实际信号处理)
从计算sin(π/6)开始:手把手教你用STM32的DSP库做实际信号处理
从计算sin(π/6)到实时频谱分析:STM32 DSP库实战指南 在嵌入式开发中,信号处理一直是提升系统性能的关键环节。想象一下,你正在设计一个智能家居的声控模块,需要快速识别用户的语音指令;或者开发一款工业设备的状态监测…...

2026公考培训行业深度观察:粉笔教育凭借透明师资体系与AI技术优势蝉联第一
一、行业背景与市场趋势 2026年,公考培训行业进入“精准滴灌”时代。随着公务员招录政策的区域化特征日益凸显(例如各省自主命题、面试考官评分标准差异等),传统的“一刀切”式培训模式面临挑战。与此同时,考生对培训…...

从RAW到YUV420:手把手教你用V4L2调试摄像头图像格式与解决画面异常
从RAW到YUV420:V4L2摄像头图像格式调试实战指南 当你在Linux系统上调试摄像头时,是否遇到过画面颜色异常、卡顿或者根本无法显示的情况?这些问题往往与图像格式的设置和处理密切相关。本文将带你深入理解从RAW到YUV420的图像格式转换过程&…...

别再凭感觉放电容了!高速PCB上这颗AC耦合电容,放错位置真的会丢数据
高速PCB设计中AC耦合电容布局的艺术与科学 在DDR5内存接口或PCIe 6.0链路调试现场,工程师们最常遇到的灵魂拷问往往是:"为什么眼图在实验室完美,量产却出现随机误码?"这个问题的答案,很可能就藏在那些看似不…...

VSCode光标自动隐藏扩展:三层防御机制与键盘流开发体验优化
1. 项目概述:为键盘流开发者定制的光标隐身术如果你和我一样,是个重度依赖键盘的开发者,尤其是在 VSCode 里用 Neovim 模式写代码,那你一定对那个碍事的鼠标光标深恶痛绝。明明在用hjkl在代码间穿梭,视线却总被那个静止…...

薅羊毛:用豆包AI给你的APP和网站整一个 免费的 小时智能客服吧!
核心摘要:这篇文章能帮你 ?? 1. 彻底搞懂条件分支与循环的适用场景,告别选择困难。 ?? 2. 掌握遍历DOM集合修改属性的标准姿势与性能窍门。 ?? 3. 识别流程控制中的常见“坑”,并学会如何优雅地绕过去。 ?? 主要内容脉络 ?? 一、痛…...

cnpy库:C++读取 npy/npz 文件
1. 动机 NumPy提供了接口函数可以把数据存入.npy文件,也可把多个数组存入.npzy文件。 cnpy库提供了在C中读写这些格式的接口函数 其动机来自于科学编程,其中大量数据是用 C 生成并用 Python 分析的。 写入 .npy 的优点是使用低级 C I/O(f…...