二叉搜索树K和KV结构模拟
一 什么是二叉搜索树
这个的结构特性非常重要,是后面函数实现的结构基础,二叉搜索树的特性是每个根节点都比自己的左树任一节点大,比自己的右树任一节点小。
例如这个图,

41是根节点,要比左树大,比右树小,满足但还不够,还要去看看41的左子树的根和右子树的根是否满足,更要判断这棵树上所有的根节点是不是都满足。而这棵树最厉害的地方之一我们用中序遍历(顺序左根右)便可以知道,遍历结果为13,15,17,22,28,33,37,41,42,50,53,58,61,66,78,排序不就排好了吗,复杂度可媲美快排和归并。二叉搜索树另一个功能那当然就是搜索了,例如我们要找66,66比根节点大,就不用去左子树找了,一下子少遍历一半,然后就去右子树找,和根节点58比较,66比58大,再去右子树找,再比较就找到了,最多查找高度次,满二叉树下为log(n)。而二叉搜索树是不是完美无缺,我也以为已经完美了,不好意思,我太年轻了,直到我看到下面这颗树。
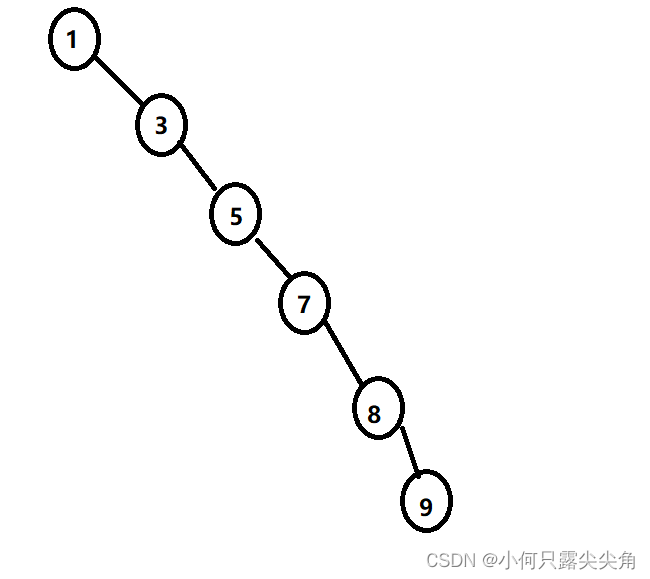
这个查找一次的效率就退化为O(N)了,解决办法:转化为平衡二叉树,通俗点就是换个根节点重新构造二叉树,例如把5或者7换成根节点,大家可以试试练习一下构建二叉树,构建完后的高度肯定比上图低,查找效率不就高了吗。
在说二叉搜索树的实现前,我们先说说什么是K结构,什么是KV结构,K结构就是只存一个数据,这个数据称为关键码,例如在英文词库里找一个英文单词,就是用关键码查找,需要的数据也是找到的关键码,但是KV结构就不同了,例如,通过拼音找汉字,这个时候拼音就是关键码,但是我们需要的数据不是拼音这个关键码,而是与之对应的汉字,这就是KV结构。
二 二叉搜索树K结构实现
1 树的节点类
template<class T>struct TreeNode{TreeNode(const T& val):_val(val)//_val可能为自定义类型,在初始化列表初始化方便调用构造函数{;}TreeNode* left = nullptr;TreeNode* right = nullptr;T _val;};2 BinaryTree树类
查找和排序都封装到了BinaryTree类中,和list一样,将节点类和树类分开封装。
(1) 默认构造函数
template<class T>class BinaryTree{public:typedef TreeNode<T> Node;BinaryTree(Node*node=nullptr) 该构造函数是用节点指针初始化,也可以再写个构造函数用个BinaryTree对象初始化:_root(node){;}private:Node* _root = nullptr;树类只需根节点地址即可管理整棵树};(2) 拷贝构造函数
因为两个copy函数都是用递归遍历二叉树,所以只能再写一个子函数,毕竟外部无法传_root指针。
void copy1(Node*tree)//前序遍历加复用insert拷贝二叉树{if (tree == nullptr)return;insert(tree->_val); 先插入根节点的值,再去左子树和右子树获取节点的数值insert内部会开辟空间copy(tree->left);copy(tree->right);}方法二比较巧妙的是它的第一个参数,root是外部传参_root的引用所以root=new node(),可以直接修改根节点而要拷贝左子树就传root->left的引用,这样new出来的节点可以直接连接到根的_left指针上。右子树同理。void copy2(Node*&root,Node*tree){if (tree== nullptr)return;root = new Node(tree->_val);copy2(root->left,tree->left);copy2(root->right,tree->right);}BinaryTree(const BinaryTree<T>&tree){//copy(tree._root);copy2(_root, tree._root);}copy2函数传指针引用我是受下面一个成员函数实现的启发,这个传引用一定要好好体会,方便理解后面的函数,非常巧妙。
(3) 赋值
用的是现代写法,比如t1,t2是两个BinaryTree对象,t1=t2就会调用下面的赋值函数,可是我的参数不是引用,那按规定自定义类型传值传参要用拷贝构造(我在类的成员函数博客曾提及),t2传参给tree就要调用拷贝构造,那tree就是一个新拷贝的对象,我们就可以用swap直接交换tree和t1的根节点指针,并且tree就是一个局部对象,函数调用完后会自动调用析构函数,省去了我们写析构t1树和创建新树的功夫,都给编译器做了。(string模拟的赋值也用到了现代写法)
void swap(BinaryTree<T>& tree){std::swap(_root, tree._root);}void operator=(BinaryTree<T> tree){swap(tree);}(4) find函数
搜索树怎么能缺少搜索功能呢
这个是find函数的子函数,子函数原因和上面同理,都是一开始传参外部无法获取_root,因为递归遍历代码量少,所以我实现的是递归版本bool _findR(Node*root,const T& val){if (root == nullptr)return false;if (val > root->_val)//val比当前_val大,去右树找{return _findR(root->right, val);}else if (val < root->_val)//val比当前_val小,去左树找{return _findR(root->left, val);}else {return true;//val和当前_val相等,返回true}}//下面这个是外部调用的find函数,只需要传要查找的值即可 bool find(const T& val){return _findR(_root, val);}
我之前在写find函数时,我还想着返回false是不是应该当左树和右树都没找到才返回false,好一会才醒悟,我们之所以去左树找,就是因为要找的val比根节点的值小,那右树更不会有了,所以左树找到nullptr就应该返回false,同理右树找到nullptr也返回false。
(5) insert函数
因为要递归去找合适的位置插入,所以同样要写一个子函数 void _insertR(Node*& root, const T&val){if (root == nullptr)当找到空节点,就可以插入了,此时才是引用起作用的时候{root = new Node(val); 直接就可以修改了,因为root是上一个节点的left或者 right指针的引用。return;}Node* cur = root;if (val > cur->_val)//val大于当前根,插入到右树去{_insertR(cur->right,val);}else if (val < cur->_val)//val小于当前根,插入到左树去{_insertR(cur->left, val);}else{return;}}void insert(const T& val){_insertR(_root, val);}(6) 中序遍历
void _Inorder(Node* root)//中序递归遍历{if (root == nullptr)return;_Inorder(root->left); 一直往左子树递归,直到左子树为空,算访问完,可以访问根。cout << root->_val << " "; _Inorder(root->right); 然后去右子树访问,同样分为左子树,根,右子树}void Inorder(){_Inorder(_root);//调用子函数,外部无法获取私有成员_root}(7) erase函数
bool _Rerase(Node*&root,const T&val){if (root == nullptr)return false;Node* cur = root;if (val > root->_val)//用_val找节点{return _Rerase(root->right, val);}else if (val < root->_val){return _Rerase(root->left, val);}else//找到了{//该节点只有一个或者无子节点if (root->left == nullptr) 由于root是上一节点左指针或者右指针的别名,所以可以直接拿root->right来赋值给root,否则还要 判断root->right是链接在上一节点的left指针还是 right指针。{root = root->right;}else if (root->right == nullptr){root = root->left;}else{删除有两个子节点的节点-替换法找该节点左子树中最大的,或者右子树中最小的来替换删除节点Node* leftMax = root->left;while (leftMax->right){leftMax = leftMax->right;}std::swap(leftMax->_val, root->_val);return _Rerase(root->left, val);调用_Rerase去删除leftMax节点,这里必须要传root->left,去左子树删除值为val的节点,不能传root例如我们交换leftMax的7和root的8值,如果传root,8的值比7大,就会去右树删,就找不到leftMax节点了,但是root的左子树仍然满足二叉搜索的特性,就可以找到leftMax节点并删除。 }delete cur; 该处统一释放删除节点,并返回truereturn true;}}bool erase(const T& val)//删除某个节点{return _Rerase(_root, val);}三 kv结构实现
本来我以为kv结构是要将K结构的树大改,当我实现后才发现,赋值可以直接照搬,,find,insert,erase中大量的if判断都是用关键码判断,根本不需要改动,中序遍历也就多打印一个数据,还有insert和拷贝构造函数要在new一个节点的时候多传一个参数。
接下来就看看一些比较重要的改动,在这里_key存关键码,而我上面二叉树K结构中是_val存的关键码,不要搞混了。
1 树的节点类
template<class T,class K>struct TreeNode{TreeNode(const T& val,const K&key):_val(val),_key(key){;} 类内可不加模板参数,也就是说TreeNode等价于TreeNode<T,k>TreeNode* left = nullptr; TreeNode* right = nullptr;T _val;//存与关键码对应的数据K _key;//_key存关键码};2 BinaryTree类
有了先前K结构树的基础,这里构造和析构函数我们就很好理解。
(1)构造和析构函数
template<class T, class K>class BinaryTree{public:typedef TreeNode<T,K> Node;BinaryTree(Node* node = nullptr) 默认构造无改变:_root(node){;}void _DestroyR(Node*&root) 递归释放节点,采用后序遍历的方式delete{if (root == nullptr)return;_DestroyR(root->left);_DestroyR(root->right);delete root;root = nullptr;}~BinaryTree(){_DestroyR(_root);}private:Node* _root = nullptr; 成员变量是不变的,毕竟kv结构的树用根节点同样可以管理};
}(3)erase函数
bool _Rerase(Node*& root, const T& key){if (root == nullptr)return false;Node* cur = root; //记录节点,方便后面deleteif (key > root->_key){return _Rerase(root->right,key);}else if (key <root->_key){return _Rerase(root->left, key);}else//找到了{//该节点只有一个或者无子节点if (root->left == nullptr){root = root->right;}else if (root->right == nullptr){root = root->left;}else{Node* leftMax = root->left;while (leftMax->right){leftMax = leftMax->right;}std::swap(leftMax->_val, root->_val); 在交换时要多交换一个值std::swap(leftMax->_key, root->_key);return _Rerase(root->left, key); 并且还是用key值去找leftMax删} 删除完leftMax后就直接return了,就不会重复删除。delete cur;return true;}}bool erase(const T& val)//删除某个节点{return _Rerase(_root, val);}二叉搜索树中最复杂的就是erase函数,大家在此处一定要画图理解。
相关文章:
二叉搜索树K和KV结构模拟
一 什么是二叉搜索树 这个的结构特性非常重要,是后面函数实现的结构基础,二叉搜索树的特性是每个根节点都比自己的左树任一节点大,比自己的右树任一节点小。 例如这个图, 41是根节点,要比左树大,比右树小&…...

nlohmann json:检查object是否存在某个键
1.通过find进行检查 #include <iostream> #include <nlohmann/json.hpp> using namespace std; using json = nlohmann::json;int main() {json data = R"({"name": "xiaoming","age": 10, "parent": [{"fat…...
15-1_Qt 5.9 C++开发指南_Qt多媒体模块概述
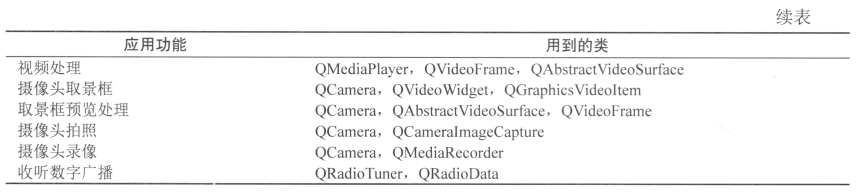
多媒体功能指的主要是计算机的音频和视频的输入、输出、显示和播放等功能,Qt 的多媒体模块为音频和视频播放、录音、摄像头拍照和录像等提供支持,甚至还提供数字收音机的支持。本章将介绍 Qt 多媒体模块的功能和使用。 文章目录 1. Qt 多媒体模块概述2. …...

分页查询中起始位置的计算
在分页查询中,page 和 pageSize 其实就是表示页数和每页的条数。这两个参数通常用于在数据库查询时进行分页。 如果你想根据 page 和 pageSize 计算数据的起始位置(例如,MySQL数据库的LIMIT查询),可以使用以下公式&am…...

Failed to execute goal org.apache.maven.plugins
原因: 这个文件D:\java\maven\com\ruoyi\pg-student\maven-metadata-local.xml出了问题 解决: 最简单的直接删除D:\java\maven\com\ruoyi\pg-student\maven-metadata-local.xml重新打包 或者把D:\java\maven\com\ruoyi\pg-student这个目录下所有文件…...

50吨收费站生活一体化污水处理设备厂家价格低
50吨收费站生活一体化污水处理设备厂家价格低 设备工艺说明 污水处理设备主要用于生活污水和与之类似的工业有机废水的处理,其主要处理方法是采用目前较为成熟的生化处理技术—生物接触氧化,水质设计按一般生活污水水质设计计算,按BOD5平均20…...
UG NX二次开发(C#)-CAM-获取刀具类型
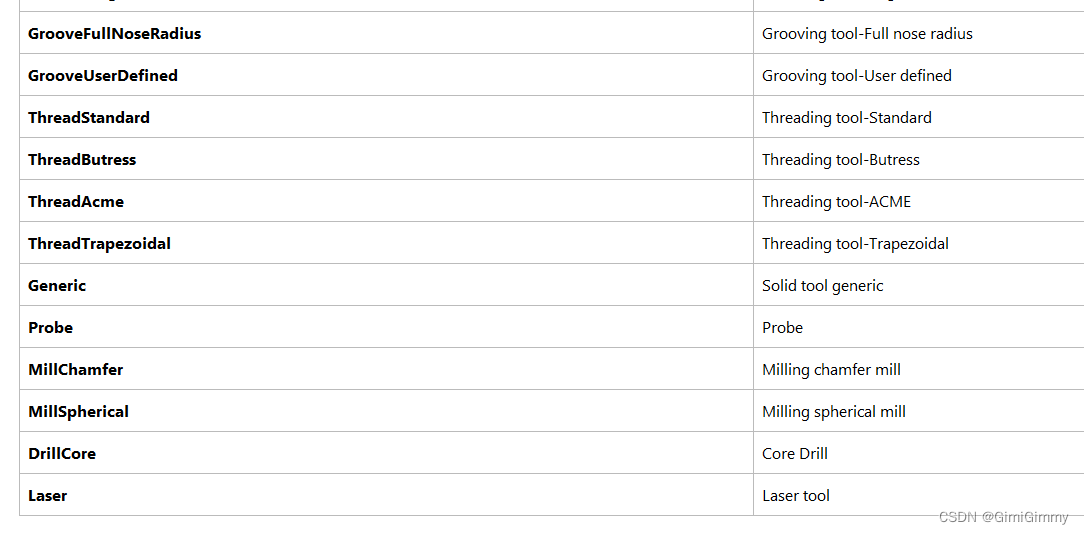
文章目录 1、前言2、UG NX中的刀具类型3、获取刀具类型3.1 刀具类型帮助文档1、前言 在UG NX的加工模块,加工刀具是一个必要的因素,其包括了多种类型的类型,有铣刀、钻刀、车刀、磨刀、成型刀等等,而且每种刀具所包含的信息也各不相同。想获取刀具的信息,那就要知道刀具的…...
Flask 框架集成Bootstrap
前面学习了 Flask 框架的基本用法,以及模板引擎 Jinja2,按理说可以开始自己的 Web 之旅了,不过在启程之前,还有个重要的武器需要了解一下,就是著名的 Bootstrap 框架和 Flask 的结合,这将大大提高开发 Web …...

在k8s 1.26.6上部署ES集群
一、k8s集群架构: IP 角色,左边是ip,右边是hostname master1 是192.168.1.3 的hostname 192.168.1.3 master1 192.168.1.4 master2 192.168.1.5 master3 192.168.1.6 node1 192.168.1.7 node2 二、部署ES集群 1、配置stor…...

用神经网络玩转数据聚类:自编码器的原理与实践
目录 引言一、什么是自编码器二、自编码器的应用场景三、自编码器的优缺点四、如何实现基于自编码器的聚类算法五、总结 引言 随着数据量的爆炸性增长,如何有效地处理和分析数据成为了一个重要的问题。数据聚类是一种常用的数据分析方法,它可以将数据集…...

Linux系统调试课:Linux Kernel Printk
🚀返回专栏总目录 文章目录 0、printk 说明1、printk 日志等级设置2、屏蔽等级日志控制机制3、printk打印常用方式4、printk打印格式0、printk 说明 在开发Linux device Driver或者跟踪调试内核行为的时候经常要通过Log API来trace整个过程,Kernel API printk()是整个Kern…...
不同版本Idea部署Maven和Tomcat教学
目录 一、2019版Idea 1.1. Maven配置 1.2. Tomcat配置 二、2023版Idea 2.1 Maven配置 2.2. Tomcat配置 一、2019版Idea 1.1. Maven配置 在这篇 http://t.csdn.cn/oetKq 我已经详细讲述了Maven的下载安装及配置,本篇就直接开始实操 : 1. 首先进入设置搜索Mave…...

Vue 3.0中的Treeshaking?
1.treeshaking是什么? Tree shaking 是一种通过清除多余代码方式来优化项目打包体积的技术,专业术语叫 Dead code elimination 简单来讲,就是在保持代码运行结果不变的前提下,去除无用的代码 如果把代码打包比作制作蛋糕&#…...
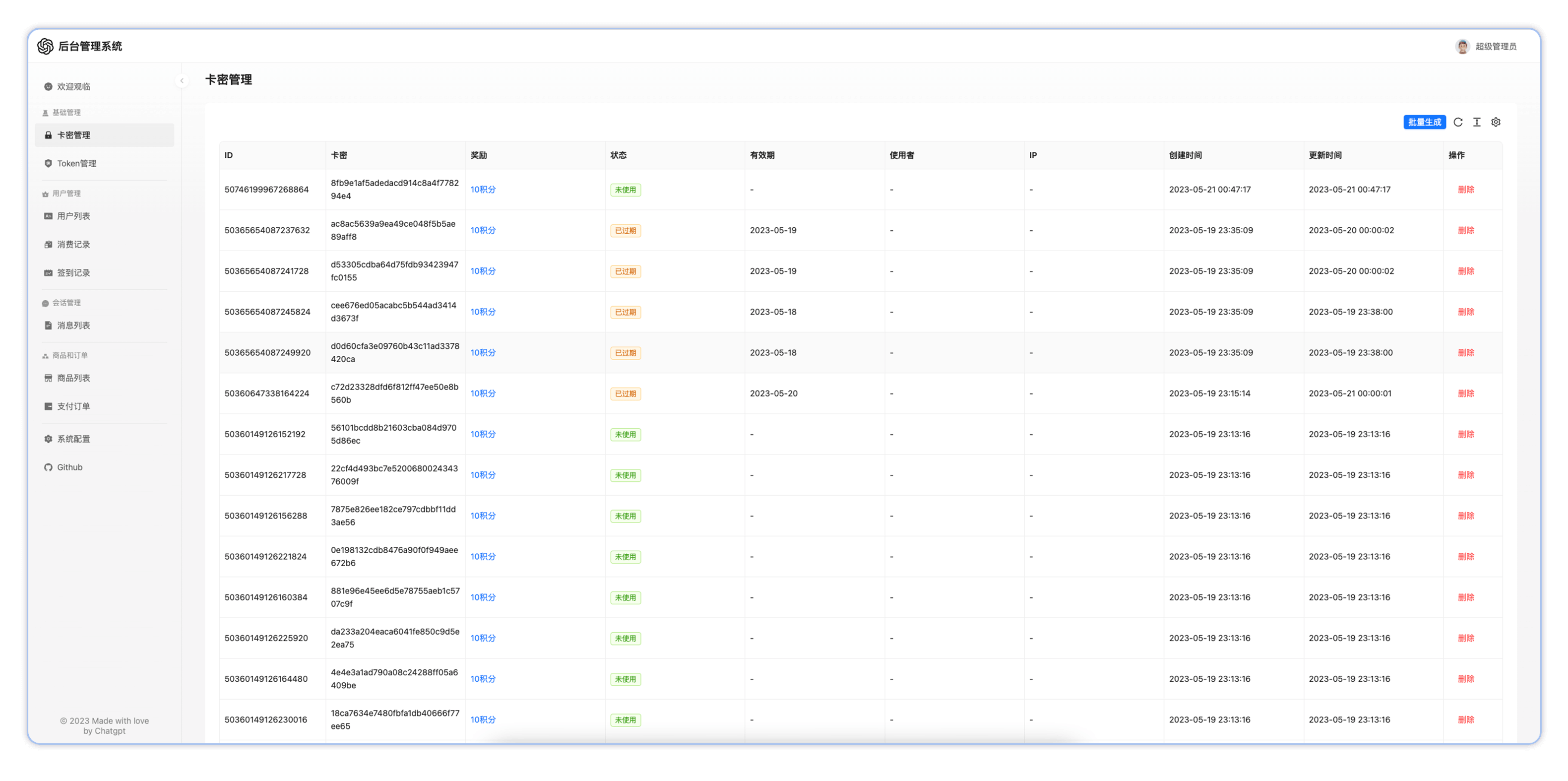
开源可商业运营的ChatGpt网页源码v1.2.2
🤖 主要功能 后台管理系统,可对用户,Token,商品,卡密等进行管理 精心设计的 UI,响应式设计 极快的首屏加载速度(~100kb) 支持Midjourney绘画和DALLE模型绘画,GPT4等应用 海量的内置 prompt 列表,来自中文和英文 一键导…...
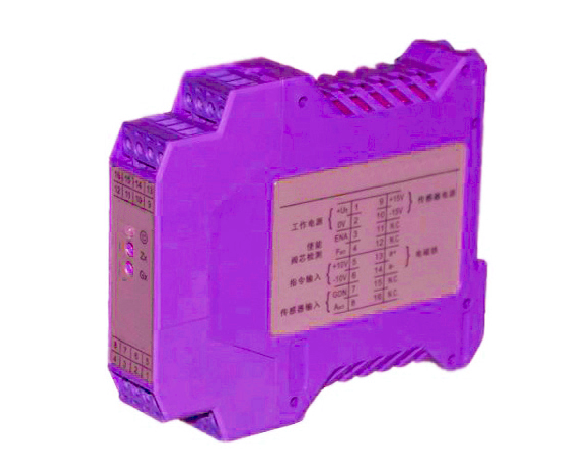
驱动阿托斯DLHZO-T伺服比例阀放大器定制
DLHZO-T型伺服比例换向阀,直动式,带LVDT位置传感器和阀芯零遮盖,可应用于各种位置闭环控制实现最佳的性能。 比例阀和模块式数字放大器配合使用。 LVDT传感器和阀套结构可确保非常高的调节精度和响应灵敏度。 失电保护位可实现在电源中断的…...
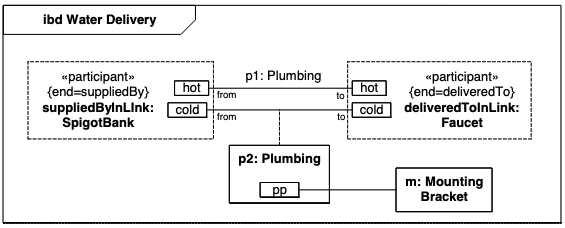
SysML V1.2 Blocks
本人看的实在是太枯燥了,很多都是机翻过了一遍 后面复习的时候,我再用chatgpt润色一下 一、综述 块是系统描述的模块化单元。每个块定义了一组特征来描述系统或其他感兴趣的元素。这些可能包括结构和行为特征,例如属性和操作,以…...

反编译微信小程序,可导出uniapp或taro项目
微信小程序反编译(全网通用) 微信小程序反编译 反编译主要分为四个阶段 操作流程 1. node.js安装 2. node安装模块 3. 开始反编译 4. 导入到微信开发者工具既可运行 微信小程序反编译 当碰到不会写的小程序功能时,正好看到隔壁小程序有类似…...
鉴源实验室丨汽车网络安全攻击实例解析(二)
作者 | 田铮 上海控安可信软件创新研究院项目经理 来源 | 鉴源实验室 社群 | 添加微信号“TICPShanghai”加入“上海控安51fusa安全社区” 引言:汽车信息安全事件频发使得汽车行业安全态势愈发紧张。这些汽车网络安全攻击事件,轻则给企业产品发布及产品…...
pycorrector一键式文本纠错工具,整合了BERT、MacBERT、ELECTRA、ERNIE等多种模型,让您立即享受纠错的便利和效果
pycorrector:一键式文本纠错工具,整合了Kenlm、ConvSeq2Seq、BERT、MacBERT、ELECTRA、ERNIE、Transformer、T5等多种模型,让您立即享受纠错的便利和效果 pycorrector: 中文文本纠错工具。支持中文音似、形似、语法错误纠正,pytho…...

Linux 日志管理
Linux 日志管理 一.Linux 下的日志服务简介 1.1 CentOS5 之前的版本 centos5 之前的版本使用系统和内核日志分离的格式记录日志 syslogd:该服务专门用于记录系统日志(system application logs) klogd: 该服务专门用于记录内核日志(linux kernel logs) centos5 之前事件的记录格…...
)
从一次生产事故复盘:我们如何优雅地处理用户上传的‘异常’Excel文件(附Apache POI配置详解)
从生产事故到防御体系:构建Excel文件处理的工程化解决方案那天凌晨2点,我被一阵急促的告警声惊醒。监控系统显示,核心文件处理服务的错误率在10分钟内飙升到35%,大量用户上传的Excel文件无法正常解析。更糟糕的是,部分…...

告别虚拟机卡顿:在Windows 11的WSL2里搞定Lichee Nano交叉编译环境
告别虚拟机卡顿:在Windows 11的WSL2里搞定Lichee Nano交叉编译环境 对于嵌入式开发者来说,配置开发环境往往是个令人头疼的问题。传统虚拟机方案虽然能提供完整的Linux体验,但资源占用高、启动慢、与宿主系统交互不便等问题一直困扰着开发者。…...

Blender渲染通道完全指南:如何像电影后期一样,分离出深度、阴影与反射图
Blender渲染通道完全指南:影视级后期制作的深度解析在数字内容创作领域,Blender已经从一个简单的3D建模工具成长为能够处理复杂视觉特效的全流程解决方案。对于追求影视级质量的中高级用户而言,掌握渲染通道技术是提升作品专业度的关键一步。…...
)
Midjourney锐化效果失效真相(2024官方未公开的渲染管线瓶颈解析)
更多请点击: https://intelliparadigm.com 第一章:Midjourney锐化效果失效真相(2024官方未公开的渲染管线瓶颈解析) 自2024年V6.2版本起,大量用户反馈 --stylize 与 --sharp 参数组合下图像边缘锐化效果显著弱化&am…...
:这份内部测试SOP已被3家头部科技公司紧急采购)
DeepSeek-R1补全能力封测倒计时(仅剩72小时开放API灰度权限):这份内部测试SOP已被3家头部科技公司紧急采购
更多请点击: https://intelliparadigm.com 第一章:DeepSeek-R1代码补全能力封测全景概览 DeepSeek-R1 是深度求索(DeepSeek)推出的高性能开源推理模型,在代码补全场景中展现出显著的上下文理解力与多语言泛化能力。本…...

Burp Suite证书安装全解:HTTPS抓包失败的根源与跨平台命令行方案
1. 为什么必须亲手安装Burp Suite证书——不是“点一下就完事”的操作很多人第一次在手机或测试设备上配置Burp Suite代理时,会下意识认为:只要把电脑上的Burp监听地址填进Wi-Fi代理设置,再用浏览器访问http://burp,点击那个绿色的…...
)
保姆级教程:Windows系统下Arcgis 10.2从下载、安装到汉化一次搞定(附常见License启动失败解决方案)
Windows系统下Arcgis 10.2完整安装与汉化实战指南第一次接触Arcgis的新手往往会被复杂的安装流程和神秘的License Manager搞得晕头转向。作为一款功能强大的地理信息系统软件,Arcgis在科研、城市规划、环境监测等领域有着广泛应用,但它的安装过程确实会让…...

神经网络与深度学习 第3周课程总结
深度学习视觉应用课程总结 一、常用计算机视觉数据集数据集名称发布方/年份规模图像规格类别数主要用途核心特点MNIST美国国家标准与技术研究院60k训练10k测试2828灰度图10类(0-9手写数字)入门级图像分类最经典的手写数字识别基准数据集Fashion-MNISTZalando(2017)60k训练10k测…...

2027考研全套资料免费分享
备战27考研最全备考资料整理完毕,一路走来深知备考搜集资料耗费大量时间,浪费不少精力。特意整理2027考研全科完整版资源,全部打包汇总,零基础考生直接拿来就能使用,省去四处搜集资料的烦恼。资料内含:&…...

具身智能:面向新兴交叉学科建设的思考与建议 2026
这份由 CCF YOCSEF 长三角五地学术委员会 2026 年 5 月发布的白皮书,聚焦具身智能作为新兴交叉学科的建设,明确其并非 AI 与机器人学的简单拼接,而是围绕物理交互中的智能行为形成的新问题域,提出 “三大基本问题 一个应用需求”…...