13 计算机视觉-代码详解
13.2 微调
为了防止在训练集上过拟合,有两种办法,第一种是扩大训练集数量,但是需要大量的成本;第二种就是应用迁移学习,将源数据学习到的知识迁移到目标数据集,即在把在源数据训练好的参数和模型(除去输出层)直接复制到目标数据集训练。
# IPython魔法函数,可以不用执行plt .show()
%matplotlib inline
import os
import torch
import torchvision
from torch import nn
from d2l import torch as d2l13.2.1 获取数据集
#@save
d2l.DATA_HUB['hotdog'] = (d2l.DATA_URL + 'hotdog.zip','fba480ffa8aa7e0febbb511d181409f899b9baa5')data_dir = d2l.download_extract('hotdog')
train_imgs = torchvision.datasets.ImageFolder(os.path.join(data_dir, 'train'))
test_imgs = torchvision.datasets.ImageFolder(os.path.join(data_dir, 'test'))
hotdogs = [train_imgs[i][0] for i in range(8)]
not_hotdogs = [train_imgs[-i-1][0] for i in range(8)]
# 展示2行8列矩阵的图片,共16张
d2l.show_images(hotdogs+not_hotdogs,2,8,scale=1.5)# 使用RGB通道的均值和标准差,以标准化每个通道
normalize = torchvision.transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])
# 图像增广
train_augs = torchvision.transforms.Compose([torchvision.transforms.RandomResizedCrop(224),torchvision.transforms.RandomHorizontalFlip(),torchvision.transforms.ToTensor(),normalize])
test_augs = torchvision.transforms.Compose([torchvision.transforms.Resize([256, 256]),torchvision.transforms.CenterCrop(224),torchvision.transforms.ToTensor(),normalize])13.2.2 初始化模型
# 自动下载网上的训练模型
finetune_net = torchvision.models.resnet18(pretrained=True)
# 输入张量的形状还是源输入张量大小,输入张量大小改为2
finetune_net.fc = nn.Linear(finetune_net.fc.in_features, 2)
nn.init.xavier_uniform_(finetune_net.fc.weight);13.2.3 微调模型
# 如果param_group=True,输出层中的模型参数将使用十倍的学习率
# 如果param_group=False,输出层中模型参数为随机值
# 训练模型
def train_fine_tuning(net, learning_rate, batch_size=128, num_epochs=5,param_group=True):train_iter = torch.utils.data.DataLoader(torchvision.datasets.ImageFolder(os.path.join(data_dir, 'train'), transform=train_augs),batch_size=batch_size, shuffle=True)test_iter = torch.utils.data.DataLoader(torchvision.datasets.ImageFolder(os.path.join(data_dir, 'test'), transform=test_augs),batch_size=batch_size)devices = d2l.try_all_gpus()loss = nn.CrossEntropyLoss(reduction="none")if param_group:params_1x = [param for name, param in net.named_parameters()if name not in ["fc.weight", "fc.bias"]]# params_1x的参数使用learning_rate学习率, net.fc.parameters()的参数使用0.001的学习率trainer = torch.optim.SGD([{'params': params_1x},{'params': net.fc.parameters(),'lr': learning_rate * 10}],lr=learning_rate, weight_decay=0.001)else:trainer = torch.optim.SGD(net.parameters(), lr=learning_rate,weight_decay=0.001)d2l.train_ch13(net, train_iter, test_iter, loss, trainer, num_epochs,devices)
train_fine_tuning(finetune_net, 5e-5)13.3 目标检测和边界框
有时候不仅要识别图像的类别,还需要识别图像的位置。在计算机视觉中叫做目标识别或者目标检测。这小节是介绍目标检测的深度学习方法。
%matplotlib inline
import torch
from d2l import torch as d2l
#@save
def box_corner_to_center(boxes):"""从(左上,右下)转换到(中间,宽度,高度)"""x1, y1, x2, y2 = boxes[:, 0], boxes[:, 1], boxes[:, 2], boxes[:, 3]# cx,xy,w,h的维度是ncx = (x1 + x2) / 2cy = (y1 + y2) / 2w = x2 - x1h = y2 - y1# torch.stack()沿着新维度对张量进行链接。boxes最开始维度是(n,4),axis=-1表示倒数第一个维度# torch.stack()将(cx, cy, w, h)的维度n将其沿着倒数第一个维度拼接在一起,又是(n,4)boxes = torch.stack((cx, cy, w, h), axis=-1)return boxes#@save
def box_center_to_corner(boxes):"""从(中间,宽度,高度)转换到(左上,右下)"""cx, cy, w, h = boxes[:, 0], boxes[:, 1], boxes[:, 2], boxes[:, 3]x1 = cx - 0.5 * wy1 = cy - 0.5 * hx2 = cx + 0.5 * wy2 = cy + 0.5 * hboxes = torch.stack((x1, y1, x2, y2), axis=-1)return boxes13.4 锚框
目标检测算法通常会在图像中采集大量的样本,本小节介绍其中一个采样办法:以某个像素为中心,生成多个不同缩放比和宽高比的边界框。
13.4.1 生成多个锚框
%matplotlib inline
import torch
from d2l import torch as d2ltorch.set_printoptions(2) # 精简输出精度,显示小数点后2位
"""
形成多个锚框
params:data:图像(批量大小,通道数,高,宽)sizes:缩放比尺寸集合ratios:宽高比集合"""
def multibox_prior(data, sizes, ratios):# 获取data后两位的值,也就是图像的高和宽in_height, in_width = data.shape[-2:]""" params:device:cpu或者gpunum_sizes:尺寸的个数nnum_ratios:宽高比个数m"""device, num_sizes, num_ratios = data.device, len(sizes), len(ratios)# 以同一像素为中心的锚框数量n+m-1boxes_per_pixel = (num_sizes + num_ratios - 1)size_tensor = torch.tensor(sizes, device=device)ratio_tensor = torch.tensor(ratios, device=device)# offset:为了将锚点移动到像素的中心,需要设置偏移量。# steps:归一化,将宽高规化到0-1之间,因为一个像素的高为1且宽为1,我们选择偏移我们的中心0.5offset_h, offset_w = 0.5, 0.5steps_h = 1.0 / in_height # 在y轴上缩放步长steps_w = 1.0 / in_width # 在x轴上缩放步长# 假设宽高512*216 那么torch.arange(in_height, device=device)=【0,1,2...511】,移动到中心就是[0.5,1.5...511.5]# 第一步:torch.arange(in_height, device=device) + offset_h代表移动到每个像素的中心,因为每个像素1*1大小.# 第二步:宽高进行归一化center_h = (torch.arange(in_height, device=device) + offset_h) * steps_hcenter_w = (torch.arange(in_width, device=device) + offset_w) * steps_w"""a = torch.tensor([1, 2, 3, 4])b = torch.tensor([4, 5, 6])x, y = torch.meshgrid(a, b,indexing='ij')print:tensor([[1, 1, 1],[2, 2, 2],[3, 3, 3],[4, 4, 4]])tensor([[4, 5, 6],[4, 5, 6],[4, 5, 6],[4, 5, 6]])x, y = torch.meshgrid(a, b,indexing='xy')print:tensor([[1, 2, 3, 4],[1, 2, 3, 4],[1, 2, 3, 4]])tensor([[4, 4, 4, 4],[5, 5, 5, 5],[6, 6, 6, 6]])"""# 对比上面例子,假设center_h=tensor([0.5,1.5...511.5])(实际上是0-1的值,这里为了简单理解写成这样) # 则shift_y=tensor([0.5,0.5..],[1.5,1.5,...],...[511.5,511.5...])shift_y, shift_x = torch.meshgrid(center_h, center_w, indexing='ij') # 将shift展平成一维序列,用上述的例子则shift_y为tensor([0.5,0.5...511.5,511.5])shift_y, shift_x = shift_y.reshape(-1), shift_x.reshape(-1)# 宽=h*s*sqrt(r)# 由于锚框只考虑s1和r1的组合,r1组合就是size_tensor * torch.sqrt(ratio_tensor[0]),s1组合就是sizes[0] * torch.sqrt(ratio_tensor[1:])# 此处要乘上in_height / in_width是因为,假设此时ratios宽高比为1,那么默认w=h,但是实际上ratios代表与原图宽高比一致,举个例子# 假设原图1000*10,那么当ratios为1时,此时w=h,而我们需要的是w/h = 1000/10,所以需要乘上in_height / in_width来与原尺寸保持一致w = torch.cat((size_tensor * torch.sqrt(ratio_tensor[0]),sizes[0] * torch.sqrt(ratio_tensor[1:])))\* in_height / in_width # 处理矩形输入h = torch.cat((size_tensor / torch.sqrt(ratio_tensor[0]),sizes[0] / torch.sqrt(ratio_tensor[1:])))# 除以2来获得半高和半宽# 每一行(-w, -h, w, h)对应一个锚框一个锚框的左上角偏差和右下角偏差anchor_manipulations = torch.stack((-w, -h, w, h)).T.repeat(in_height * in_width, 1) / 2# 每个中心点都将有boxes_per_pixel=(n+m-1)个锚框,# 形状:(w*h*(n+m-1), 4)out_grid = torch.stack([shift_x, shift_y, shift_x, shift_y],dim=1).repeat_interleave(boxes_per_pixel, dim=0)output = out_grid + anchor_manipulations# 添加一个维度return output.unsqueeze(0)img = d2l.plt.imread('../data/img/catdog.jpg')
h, w = img.shape[:2] # (1080, 1920)
X = torch.rand(size=(1, 3, h, w))
Y = multibox_prior(X, sizes=[0.75, 0.5, 0.25], ratios=[1, 2, 0.5])
print(Y.shape)# 即将Y变成(高,宽,以同一像素点为中心的锚框数,4)
# 每个锚框有四个元素(锚框的左上角x,y坐标和锚框右下角的x,y坐标)
# n+m-1=3+3-1=5
boxes = Y.reshape(h, w, 5, 4)
# 访问以(250,250)为中心的第一个锚框
boxes[250, 250, 0, :]# 显示以某个像素点为中心的所有锚框
"""
params:axes:图像坐标bboxes:某个像素点中心坐标labels:显示文本,例如s=0.2,r=1colors:锚框的颜色
"""
def show_bboxes(axes, bboxes, labels=None, colors=None):"""显示所有边界框"""def _make_list(obj, default_values=None):if obj is None:obj = default_valueselif not isinstance(obj, (list, tuple)):obj = [obj]return objlabels = _make_list(labels)colors = _make_list(colors, ['b', 'g', 'r', 'm', 'c'])for i, bbox in enumerate(bboxes):color = colors[i % len(colors)]# bbox_to_rect将边界框(左上x,左上y,右下x,右下y)格式转换成matplotlib格式:# ((左上x,左上y),宽,高)rect = d2l.bbox_to_rect(bbox.detach().numpy(), color)axes.add_patch(rect)if labels and len(labels) > i:text_color = 'k' if color == 'w' else 'w'axes.text(rect.xy[0], rect.xy[1], labels[i],va='center', ha='center', fontsize=9, color=text_color,bbox=dict(facecolor=color, lw=0))
d2l.set_figsize()
bbox_scale = torch.tensor((w, h, w, h))
fig = d2l.plt.imshow(img)
show_bboxes(fig.axes, boxes[750, 750, :, :] * bbox_scale,['s=0.75, r=1', 's=0.5, r=1', 's=0.25, r=1', 's=0.75, r=2','s=0.75, r=0.5'])13.4.2 交并比
# 衡量锚框与真实框之间或者锚框与锚框之间的相似度,即A∩B/A∪B
def box_iou(boxes1, boxes2):"""计算两个锚框或边界框列表中成对的交并比"""box_area = lambda boxes: ((boxes[:, 2] - boxes[:, 0]) *(boxes[:, 3] - boxes[:, 1]))# boxes1,boxes2,areas1,areas2的形状:# boxes1:(boxes1的数量,4),# boxes2:(boxes2的数量,4),# areas1:(boxes1的数量,),# areas2:(boxes2的数量,)areas1 = box_area(boxes1)areas2 = box_area(boxes2)# inter_upperlefts,inter_lowerrights,inters的形状:# (boxes1的数量,boxes2的数量,2)inter_upperlefts = torch.max(boxes1[:, None, :2], boxes2[:, :2])inter_lowerrights = torch.min(boxes1[:, None, 2:], boxes2[:, 2:])inters = (inter_lowerrights - inter_upperlefts).clamp(min=0)# inter_areasandunion_areas的形状:(boxes1的数量,boxes2的数量)inter_areas = inters[:, :, 0] * inters[:, :, 1]union_areas = areas1[:, None] + areas2 - inter_areasreturn inter_areas / union_areas13.4.3 在训练数据中标注锚框
%matplotlib inline
import torch
from d2l import torch as d2ltorch.set_printoptions(2) # 精简输出精度,显示小数点后2位
"""
形成多个锚框
params:data:图像(批量大小,通道数,高,宽)sizes:缩放比尺寸集合ratios:宽高比集合"""
def multibox_prior(data, sizes, ratios):# 获取data后两位的值,也就是图像的高和宽in_height, in_width = data.shape[-2:]""" params:device:cpu或者gpunum_sizes:尺寸的个数nnum_ratios:宽高比个数m"""device, num_sizes, num_ratios = data.device, len(sizes), len(ratios)# 以同一像素为中心的锚框数量n+m-1boxes_per_pixel = (num_sizes + num_ratios - 1)size_tensor = torch.tensor(sizes, device=device)ratio_tensor = torch.tensor(ratios, device=device)# offset:为了将锚点移动到像素的中心,需要设置偏移量。# steps:归一化,将宽高规化到0-1之间,因为一个像素的高为1且宽为1,我们选择偏移我们的中心0.5offset_h, offset_w = 0.5, 0.5steps_h = 1.0 / in_height # 在y轴上缩放步长steps_w = 1.0 / in_width # 在x轴上缩放步长# 假设宽高512*216 那么torch.arange(in_height, device=device)=【0,1,2...511】,移动到中心就是[0.5,1.5...511.5]# 第一步:torch.arange(in_height, device=device) + offset_h代表移动到每个像素的中心,因为每个像素1*1大小.# 第二步:宽高进行归一化center_h = (torch.arange(in_height, device=device) + offset_h) * steps_hcenter_w = (torch.arange(in_width, device=device) + offset_w) * steps_w"""a = torch.tensor([1, 2, 3, 4])b = torch.tensor([4, 5, 6])x, y = torch.meshgrid(a, b,indexing='ij')print:tensor([[1, 1, 1],[2, 2, 2],[3, 3, 3],[4, 4, 4]])tensor([[4, 5, 6],[4, 5, 6],[4, 5, 6],[4, 5, 6]])x, y = torch.meshgrid(a, b,indexing='xy')print:tensor([[1, 2, 3, 4],[1, 2, 3, 4],[1, 2, 3, 4]])tensor([[4, 4, 4, 4],[5, 5, 5, 5],[6, 6, 6, 6]])"""# 对比上面例子,假设center_h=tensor([0.5,1.5...511.5])(实际上是0-1的值,这里为了简单理解写成这样) # 则shift_y=tensor([0.5,0.5..],[1.5,1.5,...],...[511.5,511.5...])shift_y, shift_x = torch.meshgrid(center_h, center_w, indexing='ij') # 将shift展平成一维序列,用上述的例子则shift_y为tensor([0.5,0.5...511.5,511.5])shift_y, shift_x = shift_y.reshape(-1), shift_x.reshape(-1)# 宽=h*s*sqrt(r)# 由于锚框只考虑s1和r1的组合,r1组合就是size_tensor * torch.sqrt(ratio_tensor[0]),s1组合就是sizes[0] * torch.sqrt(ratio_tensor[1:])# 此处要乘上in_height / in_width是因为,假设此时ratios宽高比为1,那么默认w=h,但是实际上ratios代表与原图宽高比一致,举个例子# 假设原图1000*10,那么当ratios为1时,此时w=h,而我们需要的是w/h = 1000/10,所以需要乘上in_height / in_width来与原尺寸保持一致w = torch.cat((size_tensor * torch.sqrt(ratio_tensor[0]),sizes[0] * torch.sqrt(ratio_tensor[1:])))\* in_height / in_width # 处理矩形输入h = torch.cat((size_tensor / torch.sqrt(ratio_tensor[0]),sizes[0] / torch.sqrt(ratio_tensor[1:])))# 除以2来获得半高和半宽# 每一行(-w, -h, w, h)对应一个锚框一个锚框的左上角偏差和右下角偏差anchor_manipulations = torch.stack((-w, -h, w, h)).T.repeat(in_height * in_width, 1) / 2# 每个中心点都将有boxes_per_pixel=(n+m-1)个锚框,# 形状:(w*h*(n+m-1), 4)out_grid = torch.stack([shift_x, shift_y, shift_x, shift_y],dim=1).repeat_interleave(boxes_per_pixel, dim=0)output = out_grid + anchor_manipulations# 添加一个维度return output.unsqueeze(0)img = d2l.plt.imread('../data/img/catdog.jpg')
h, w = img.shape[:2] # (1080, 1920)
X = torch.rand(size=(1, 3, h, w))
Y = multibox_prior(X, sizes=[0.75, 0.5, 0.25], ratios=[1, 2, 0.5])
print(Y.shape)# 即将Y变成(高,宽,以同一像素点为中心的锚框数,4)
# 每个锚框有四个元素(锚框的左上角x,y坐标和锚框右下角的x,y坐标)
# n+m-1=3+3-1=5
boxes = Y.reshape(h, w, 5, 4)
# 访问以(250,250)为中心的第一个锚框
boxes[250, 250, 0, :]# 显示以某个像素点为中心的所有锚框
"""
params:axes:图像坐标bboxes:某个像素点中心坐标labels:显示文本,例如s=0.2,r=1colors:锚框的颜色
"""
def show_bboxes(axes, bboxes, labels=None, colors=None):"""显示所有边界框"""def _make_list(obj, default_values=None):if obj is None:obj = default_valueselif not isinstance(obj, (list, tuple)):obj = [obj]return objlabels = _make_list(labels)colors = _make_list(colors, ['b', 'g', 'r', 'm', 'c'])for i, bbox in enumerate(bboxes):color = colors[i % len(colors)]# bbox_to_rect将边界框(左上x,左上y,右下x,右下y)格式转换成matplotlib格式:# ((左上x,左上y),宽,高)rect = d2l.bbox_to_rect(bbox.detach().numpy(), color)axes.add_patch(rect)if labels and len(labels) > i:text_color = 'k' if color == 'w' else 'w'axes.text(rect.xy[0], rect.xy[1], labels[i],va='center', ha='center', fontsize=9, color=text_color,bbox=dict(facecolor=color, lw=0))
d2l.set_figsize()
bbox_scale = torch.tensor((w, h, w, h))
fig = d2l.plt.imshow(img)
show_bboxes(fig.axes, boxes[750, 750, :, :] * bbox_scale,['s=0.75, r=1', 's=0.5, r=1', 's=0.25, r=1', 's=0.75, r=2','s=0.75, r=0.5'])# 衡量锚框与真实框之间或者锚框与锚框之间的相似度,即A∩B/A∪B
def box_iou(boxes1, boxes2):"""计算两个锚框或边界框列表中成对的交并比"""box_area = lambda boxes: ((boxes[:, 2] - boxes[:, 0]) *(boxes[:, 3] - boxes[:, 1]))# boxes1,boxes2,areas1,areas2的形状:# boxes1:(boxes1的数量,4),# boxes2:(boxes2的数量,4),# areas1:(boxes1的数量,),# areas2:(boxes2的数量,)areas1 = box_area(boxes1)areas2 = box_area(boxes2)# inter_upperlefts,inter_lowerrights,inters的形状:# (boxes1的数量,boxes2的数量,2)inter_upperlefts = torch.max(boxes1[:, None, :2], boxes2[:, :2])inter_lowerrights = torch.min(boxes1[:, None, 2:], boxes2[:, 2:])inters = (inter_lowerrights - inter_upperlefts).clamp(min=0)# inter_areasandunion_areas的形状:(boxes1的数量,boxes2的数量)inter_areas = inters[:, :, 0] * inters[:, :, 1]union_areas = areas1[:, None] + areas2 - inter_areasreturn inter_areas / union_areas
# 将最接近的真实边界框分配给锚框
# iou_threshold:阈值
def assign_anchor_to_bbox(ground_truth, anchors, device, iou_threshold=0.5):# num_anchors=na num_gt_boxes=nbnum_anchors, num_gt_boxes = anchors.shape[0], ground_truth.shape[0]# 位于第i行和第j列的元素x_ij是锚框i和真实边界框j的IoUjaccard = box_iou(anchors, ground_truth)# 对于每个锚框,分配的真实边界框的张量,初始值为-1anchors_bbox_map = torch.full((num_anchors,), -1, dtype=torch.long,device=device)# 找到每一行中最大交并比的ground_truth和anchors索引号max_ious, indices = torch.max(jaccard, dim=1)# 找到剩余交并比大于阈值的索引号anc_i = torch.nonzero(max_ious >= iou_threshold).reshape(-1)box_j = indices[max_ious >= iou_threshold]anchors_bbox_map[anc_i] = box_j# 删去这些索引行和列col_discard = torch.full((num_anchors,), -1)row_discard = torch.full((num_gt_boxes,), -1)for _ in range(num_gt_boxes):max_idx = torch.argmax(jaccard)box_idx = (max_idx % num_gt_boxes).long()anc_idx = (max_idx / num_gt_boxes).long()anchors_bbox_map[anc_idx] = box_idxjaccard[:, box_idx] = col_discardjaccard[anc_idx, :] = row_discardreturn anchors_bbox_map
#@save
def offset_boxes(anchors, assigned_bb, eps=1e-6):"""对锚框偏移量的转换"""c_anc = d2l.box_corner_to_center(anchors)c_assigned_bb = d2l.box_corner_to_center(assigned_bb)offset_xy = 10 * (c_assigned_bb[:, :2] - c_anc[:, :2]) / c_anc[:, 2:]offset_wh = 5 * torch.log(eps + c_assigned_bb[:, 2:] / c_anc[:, 2:])offset = torch.cat([offset_xy, offset_wh], axis=1)return offset
#@save
def multibox_target(anchors, labels):"""使用真实边界框标记锚框"""batch_size, anchors = labels.shape[0], anchors.squeeze(0)batch_offset, batch_mask, batch_class_labels = [], [], []device, num_anchors = anchors.device, anchors.shape[0]for i in range(batch_size):label = labels[i, :, :]anchors_bbox_map = assign_anchor_to_bbox(label[:, 1:], anchors, device)bbox_mask = ((anchors_bbox_map >= 0).float().unsqueeze(-1)).repeat(1, 4)# 将类标签和分配的边界框坐标初始化为零class_labels = torch.zeros(num_anchors, dtype=torch.long,device=device)assigned_bb = torch.zeros((num_anchors, 4), dtype=torch.float32,device=device)# 使用真实边界框来标记锚框的类别。# 如果一个锚框没有被分配,标记其为背景(值为零)indices_true = torch.nonzero(anchors_bbox_map >= 0)bb_idx = anchors_bbox_map[indices_true]class_labels[indices_true] = label[bb_idx, 0].long() + 1assigned_bb[indices_true] = label[bb_idx, 1:]# 偏移量转换offset = offset_boxes(anchors, assigned_bb) * bbox_maskbatch_offset.append(offset.reshape(-1))batch_mask.append(bbox_mask.reshape(-1))batch_class_labels.append(class_labels)bbox_offset = torch.stack(batch_offset)bbox_mask = torch.stack(batch_mask)class_labels = torch.stack(batch_class_labels)return (bbox_offset, bbox_mask, class_labels)ground_truth = torch.tensor([[0, 0.1, 0.08, 0.52, 0.92],[1, 0.55, 0.2, 0.9, 0.88]])
anchors = torch.tensor([[0, 0.1, 0.2, 0.3], [0.15, 0.2, 0.4, 0.4],[0.63, 0.05, 0.88, 0.98], [0.66, 0.45, 0.8, 0.8],[0.57, 0.3, 0.92, 0.9]])
相关文章:

13 计算机视觉-代码详解
13.2 微调 为了防止在训练集上过拟合,有两种办法,第一种是扩大训练集数量,但是需要大量的成本;第二种就是应用迁移学习,将源数据学习到的知识迁移到目标数据集,即在把在源数据训练好的参数和模型ÿ…...
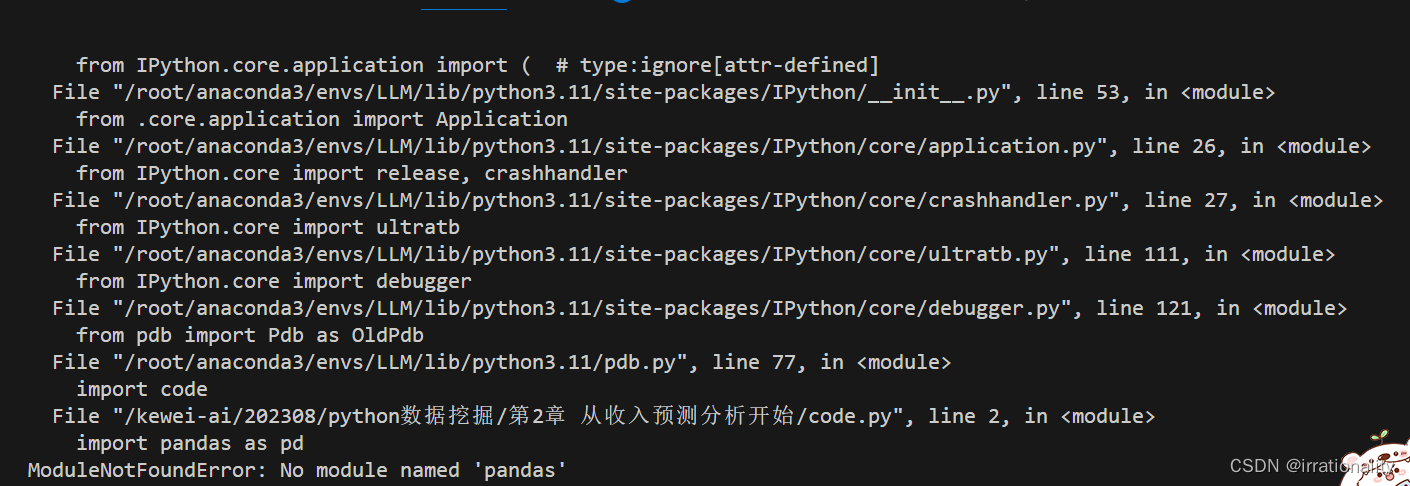
jupyter打开ipynb后,还没有运行cell,反复报错
今天遇到了一个比较奇怪的问题: 这个原因是当前目录下有一个code.py的文件,一旦打开ipynb,就是先执行code.py,而且遇到报错,还会反复执行,导致内核崩溃。...
一台阿里云服务器怎么部署多个网站?以CentOS系统为例
本文阿里云百科介绍如何在CentOS 7系统的ECS实例上使用Nginx搭建多个Web站点。本教程适用于熟悉Linux操作系统,希望合理利用资源、统一管理站点以提高运维效率的用户。比如,您可以在一台云服务器上配置多个不同分类的博客平台或者搭建多个Web站点实现复杂…...
history记录日期时间和日志记录操作
history命令能查看到操作日期和时间的配置方法: 1)在/etc/profile文件中添加一行: export HISTTIMEFORMAT"%F %T whoami " 2)保存后,执行加载命令: source /etc/profile 3)然后检…...

RocketMQ 单机源码部署 自定义配置文件和端口以及acl权限配置解析
思路 1、我们首先配置完 namesrv和broker和acl认证的配置文件,然后直接使用-c指定配置文件来启动程序,就会非常明了,用户名密码要大于6,第一个用户我测试着不知道为什么始终有最高权限,大家尽量不要吧第一个用户给别人…...
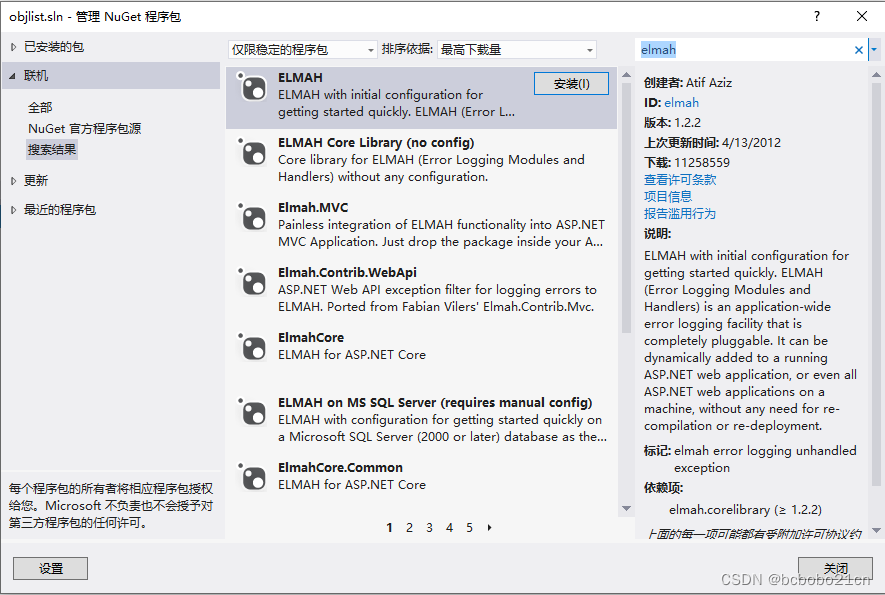
NuGet控制台命令初步使用
查看所有安装的包, 查找包,提示Nuget版本低;安装一个更高版本; 查看所有安装的包, 查找名字包含某字符串的包, 查找名字包含某字符串的包, 安装,使用-version指定版本,可…...

2023年国赛数学建模思路 - 案例:FPTree-频繁模式树算法
文章目录 算法介绍FP树表示法构建FP树实现代码 建模资料 ## 赛题思路 (赛题出来以后第一时间在CSDN分享) https://blog.csdn.net/dc_sinor?typeblog 算法介绍 FP-Tree算法全称是FrequentPattern Tree算法,就是频繁模式树算法,…...

Positive Technologies:有针对性的攻击占非洲所有攻击的 68%
网络犯罪分子最常攻击的是非洲的金融公司和电信公司 Positive Technologies 分析了 2022–2023 年非洲遇到的各种网络安全威胁,并在圣彼得堡举行的第二届俄罗斯—非洲峰会上介绍了研究结果。根据我们的专家的介绍,非洲金融部门受到的网络攻击最多&#…...

Flink CDC系列之:TiDB CDC 导入 Elasticsearch
Flink CDC系列之:TiDB CDC 导入 Elasticsearch 一、通过docker 来启动 TiDB 集群二、下载 Flink 和所需要的依赖包三、在TiDB数据库中创建表和准备数据四、启动Flink 集群,再启动 SQL CLI五、在 Flink SQL CLI 中使用 Flink DDL 创建表六、Kibana查看Ela…...

未来混合动力汽车的发展:技术探索与前景展望
随着环境保护意识的增强和对能源消耗的关注,混合动力汽车成为了汽车行业的研发热点。混合动力汽车融合了传统燃油动力和电力动力系统,通过优化能源利用效率,既降低了燃油消耗和排放,又提供了更长的续航里程。本文将探讨混合动力汽…...
C进阶(2/7)前篇——指针进阶
前言:本文章讲解部分指针进阶内容。后续继续更新。 文章重点: 1. 字符指针 2. 数组指针 3. 指针数组 4. 数组传参和指针传参 目录 前言:本文章讲解部分指针进阶内容。后续继续更新。 指针初阶了解: 1.字符指针 1.1一道有关于字…...
C 内存分配器 mimalloc
有论文 … … https://www.microsoft.com/en-us/research/publication/mimalloc-free-list-sharding-in-action/ 可以减少内存碎片,微软研究院2019 年开源出的内存分配器 代码,适配linux...

leetcode做题笔记74搜索二维矩阵
给你一个满足下述两条属性的 m x n 整数矩阵: 每行中的整数从左到右按非递减顺序排列。每行的第一个整数大于前一行的最后一个整数。 给你一个整数 target ,如果 target 在矩阵中,返回 true ;否则,返回 false 。 思…...

深信服数据中心管理系统 XXE漏洞复现
0x01 产品简介 深信服数据中心管理系统DC为AC的外置数据中心,主要用于海量日志数据的异地扩展备份管理,多条件组合的高效查询,统计和趋势报表生成,设备运行状态监控等功能。 0x02 漏洞概述 深信服数据中心管理系统DC存在XML外部实…...

【Kubernetes】Kubernetes的Pod进阶
Pod进阶 一、资源限制和重启策略1. 资源限制2. 资源单位2.1 CPU 资源单位2.2 内存 资源单位 3. 重启策略(restartPolicy) 二、健康检查的概念1. 健康检查1.1 探针的三种规则1.2 Probe 支持三种检查方法 2. 示例2.1 exec 方式2.2 httpGet 方式2.3 tcpSock…...

都错了!机械硬盘远比SSD更省电 最多领先94%
相信在绝大多数人的认知中,SSD固态硬盘因为没有HDD机械硬盘那样的移动部件,不但更稳定,还更省电。 但是,存储服务商Scality的研究表明,恰恰相反,HDD更省电。 他们以美光6500 ION 30.72TB QLC SSD、希捷银河…...
tomcat设置PermSize
最近tomcat老是报错,查看了日志出现PermGen 内存不够用,重启tomcat后查询使用情况 通过启动参数发现没有设置 PermGen,继续通过jmap查看 jmap -heap 21179 发现99%已使用,而且默认是30.5M,太小了,这里设置成256M 1. 创建setenv.sh文件 在/usr/local/tomcat/bin目录下创建一个…...
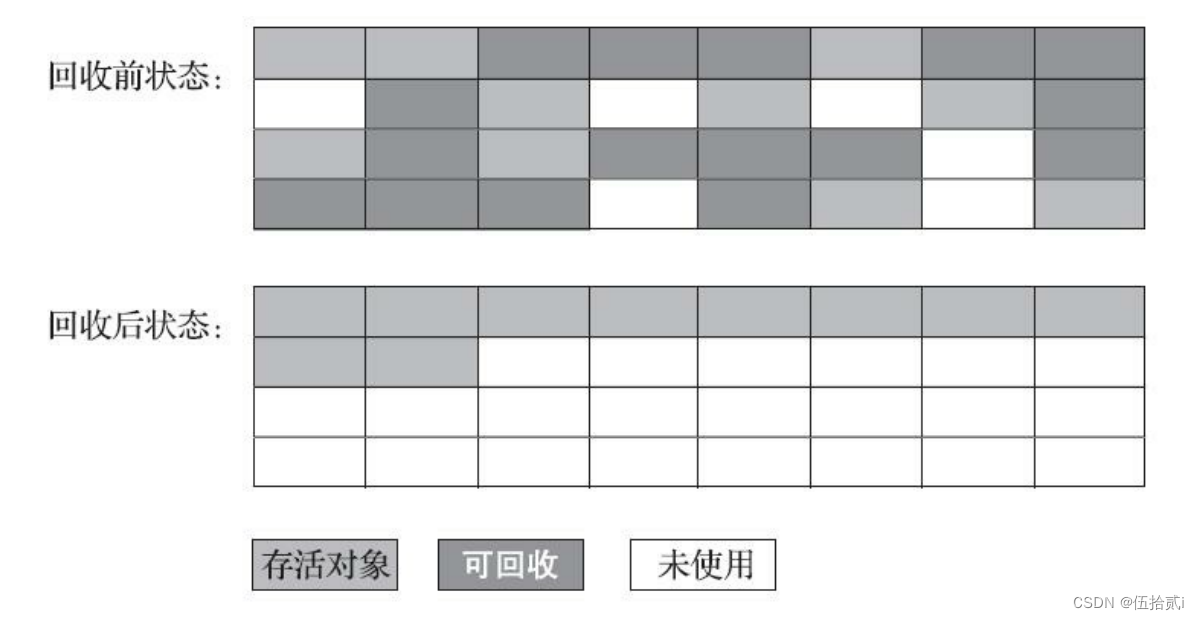
JVM——分代收集理论和垃圾回收算法
一、分代收集理论 1、三个假说 弱分代假说:绝大多数对象都是朝生夕灭的。 强分代假说:熬过越多次垃圾收集过程的对象越难以消亡。 这两个分代假说共同奠定了多款常用的垃圾收集器的一致的设计原则:收集器应该将Java堆划分出不同的区域&…...

jar包独立运行的几种方式
linux启动jar包的方式,直接运行与守护进程运行 通常我们开发好的程序需要打成war/jar包,在linux运行,war包好说直接丢在tomcat中即可,如果开发好的程序为jar包的话,方式比较多 直接启动(java-jar xxx.jar) java -jar shareniu.jar 特点:当前ssh窗口被锁定&#x…...
[python] 安装numpy+scipy+matlotlib+scikit-learn及问题解决
这篇文章主要讲述Python如何安装Numpy、Scipy、Matlotlib、Scikit-learn等库的过程及遇到的问题解决方法。最近安装这个真是一把泪啊,各种不兼容问题和报错,希望文章对你有所帮助吧!你可能遇到的问题包括: ImportError: N…...

影刀RPA跨境店群运营架构:TikTok Shop矩阵多节点高并发调度与Python环境隔离实战
大家好,我是林焱。 太有意思了,刚刷朋友圈,看到一个在跨境圈子里被疯狂转发的消息。 有几个当年和我一样,在职业技术学院念工程出身的 00 后学弟,最近跑回母校干了件特别硬核的事。 他们没有像传统的成功校友那样&a…...
)
ElevenLabs荷兰文语音生成速度对比实测:从4.2s→0.8s的WebSocket流式优化路径(附可复用代码片段)
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs荷兰文语音生成速度对比实测:从4.2s→0.8s的WebSocket流式优化路径(附可复用代码片段) ElevenLabs 的 Dutch(nl-NL)语音合成在默认…...

洛圣都生存指南:YimMenu开源游戏增强工具与安全防护系统深度解析
洛圣都生存指南:YimMenu开源游戏增强工具与安全防护系统深度解析 【免费下载链接】YimMenu YimMenu, a GTA V menu protecting against a wide ranges of the public crashes and improving the overall experience. 项目地址: https://gitcode.com/GitHub_Trendi…...

DreamTalk多语言支持深度分析:从中文到德语的语音驱动生成
DreamTalk多语言支持深度分析:从中文到德语的语音驱动生成 【免费下载链接】dreamtalk Official implementations for paper: DreamTalk: When Expressive Talking Head Generation Meets Diffusion Probabilistic Models 项目地址: https://gitcode.com/gh_mirro…...

如何快速掌握TegraRcmGUI:Windows上最简单的Switch注入工具终极指南
如何快速掌握TegraRcmGUI:Windows上最简单的Switch注入工具终极指南 【免费下载链接】TegraRcmGUI C GUI for TegraRcmSmash (Fuse Gele exploit for Nintendo Switch) 项目地址: https://gitcode.com/gh_mirrors/te/TegraRcmGUI 想要在Nintendo Switch上体验…...

ElastiFlow企业级网络流量监控解决方案:5大核心优势与架构深度解析
ElastiFlow企业级网络流量监控解决方案:5大核心优势与架构深度解析 【免费下载链接】elastiflow Network flow analytics (Netflow, sFlow and IPFIX) with the Elastic Stack 项目地址: https://gitcode.com/gh_mirrors/el/elastiflow 在数字化转型浪潮中&a…...

如何快速掌握ComfyUI_InstantID:从零到一的AI人脸编辑完整实战指南
如何快速掌握ComfyUI_InstantID:从零到一的AI人脸编辑完整实战指南 【免费下载链接】ComfyUI_InstantID 项目地址: https://gitcode.com/gh_mirrors/co/ComfyUI_InstantID 在AI图像生成领域,保持特定人物身份的同时实现风格转换一直是个技术挑战…...

反向传播:从轮廓到精雕细琢
反向传播:从轮廓到精雕细琢模型知道损失值之后,怎么调整自己的参数?上一篇文章我们讲了损失函数——它像一个指南针,告诉模型"你离正确答案还有多远"。 那知道偏了之后,模型该怎么调整自己的参数?…...

Audio Slicer:智能音频分割终极指南,告别繁琐手动剪辑
Audio Slicer:智能音频分割终极指南,告别繁琐手动剪辑 【免费下载链接】audio-slicer A simple GUI application that slices audio with silence detection 项目地址: https://gitcode.com/gh_mirrors/aud/audio-slicer 还在为音频剪辑的繁琐操作…...

做网安的这几年,挖漏洞接私活赚的是我工资的3倍,这些门道没几人知道
前言 这是我做网络安全工程师(简称网安)的第9个年头,从我工作的第3年起,我就一直在开始尝试去接网安方面的私活,这6年平均下来,我接私活赚的钱几乎是我工资的3倍。 而很多人要么不敢去做,要么就…...