非常详细的相机标定(六)(2维坐标点转为3维坐标点)
根据提取的相机的参数,2维坐标点转为3维坐标点,代码如下:
import argparse
from argparse import RawTextHelpFormatter
import numpy as np
import cv2# 寻找焦点
def cam_calib_find_corners(img, rlt_dir, col, row):# 灰度化图片,减少参数的运算gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)# 寻找角点ret, corners = cv2.findChessboardCorners(gray, (col, row), None)# 为了得到稍微精确一点的角点坐标,进一步对角点进行亚像素寻找corners2 = cv2.cornerSubPix(gray, corners, (7, 7), (-1, -1), (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_COUNT, 10, 0.001))if ret == True:# 保存角点图像sav_path = rlt_dir + "/1_corner.jpg"# 绘制角点cv2.drawChessboardCorners(img, (col, row), corners2, ret)cv2.imwrite(sav_path, img)return (ret, corners2)# 相机标定
def cam_calib_calibrate(img_dir, rlt_dir, col, row, img_num):w = 0h = 0all_corners = []patterns = []x, y = np.meshgrid(range(col), range(row))prod = row * colpattern_points = np.hstack((x.reshape(prod, 1), y.reshape(prod, 1), np.zeros((prod, 1)))).astype(np.float32)img_path = r"C:\Users\17930\Desktop\1.jpg"img = cv2.imread(img_path)if img is None:print(f"Error reading image at {img_path}")passelse:(h, w) = img.shape[:2]ret, corners = cam_calib_find_corners(img, rlt_dir, col, row)all_corners.append(corners)patterns.append(pattern_points)rms, cameraMatrix, distCoeffs, rvecs, tvecs = cv2.calibrateCamera(patterns, all_corners, (w, h), None, None)print('相机内参', cameraMatrix)print('相机外参旋转向量', rvecs)print('相机外参平移向量', tvecs)return cameraMatrix, distCoeffs, rvecs, tvecsif __name__ == "__main__":parser = argparse.ArgumentParser(description="读取标定的图片并保存结果", formatter_class=RawTextHelpFormatter)parser.add_argument("--img_dir", help="标定图片路径", type=str,metavar='', default=r'D:\螺丝数据集与相机标定代码\camera\calib_img')parser.add_argument("--rlt_dir", help="保存路径", type=str,metavar='', default="rlt_dir")parser.add_argument("--crct_img_dir", help="待矫正图像路径",type=str, metavar='', default="crct_img")parser.add_argument("--row_num", help="每一行有多少个角点,边缘处的不算",type=int, metavar='', default="7")parser.add_argument("--col_num", help="每一列有多少个角点,边缘处的不算",type=int, metavar='', default="6")parser.add_argument("--img_num", help="多少幅图像",type=int, metavar='', default="4")args = parser.parse_args()cameraMatrix, distCoeffs, rvecs, tvecs = cam_calib_calibrate(args.img_dir, args.rlt_dir, args.row_num, args.col_num, args.img_num)image_points = np.array([[55, 66], [77, 88]], dtype=np.float32)world_z = 0world_points = []for i in range(len(rvecs)):rotation_matrix, _ = cv2.Rodrigues(rvecs[i])projection_matrix = np.dot(cameraMatrix, np.hstack((rotation_matrix, tvecs[i])))inv_projection_matrix = np.linalg.pinv(projection_matrix)for pt in image_points:img_pt = np.array([pt[0], pt[1], 1])ray_dir = np.dot(inv_projection_matrix, img_pt)scale = (world_z - tvecs[i][2]) / ray_dir[2]world_pt = tvecs[i].reshape(3) + scale * ray_dir[:3]world_points.append(world_pt)world_points = np.array(world_points)print(world_points)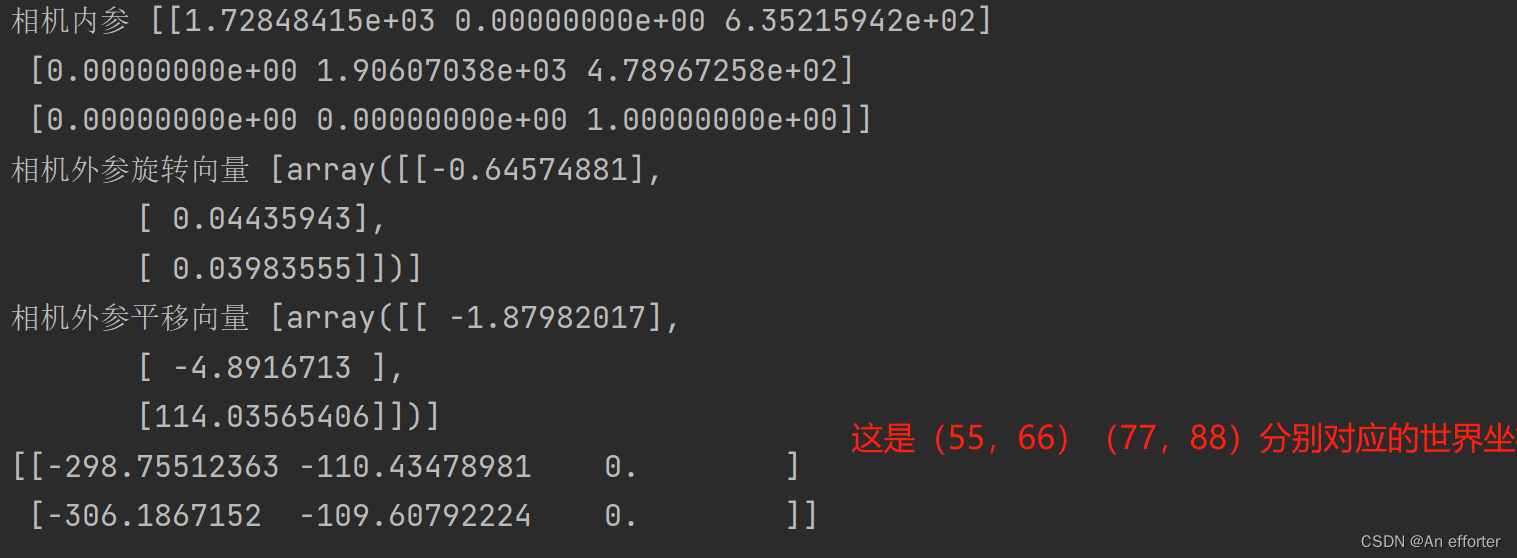
相关文章:
非常详细的相机标定(六)(2维坐标点转为3维坐标点)
根据提取的相机的参数,2维坐标点转为3维坐标点,代码如下: import argparse from argparse import RawTextHelpFormatter import numpy as np import cv2# 寻找焦点 def cam_calib_find_corners(img, rlt_dir, col, row):# 灰度化图片&#x…...
云计算虚拟仿真实训平台
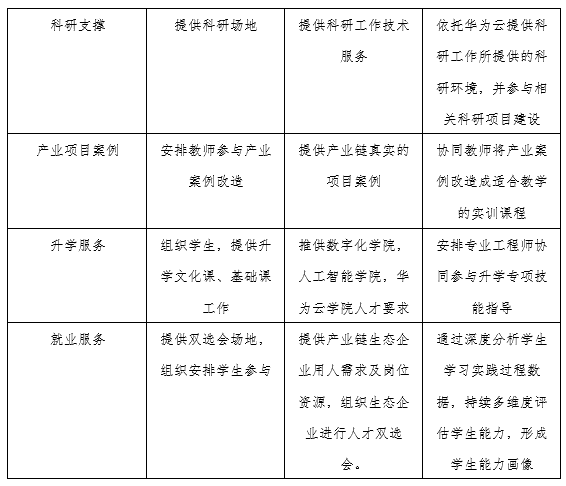
一、云计算虚拟仿真系统概述 云计算虚拟仿真系统是一种基于云计算技术和虚拟化技术的系统,用于实现各种仿真和模拟任务。它可以提供强大的计算能力和资源管理,为用户提供灵活、高效、可扩展的仿真环境。 该系统通常由一组服务器、网络和存储设备组成&am…...

计算机网络:网络字节序
目录 一、字节序1.字节序概念2.字节序的理解(1)大端模式存储数据(2)小端模式存储数据 二、网络字节序 一、字节序 1.字节序概念 字节序:内存中存储多字节数据的顺序。 难道存储数据还要看顺序吗? yes。内…...

2023国赛数学建模A题思路分析
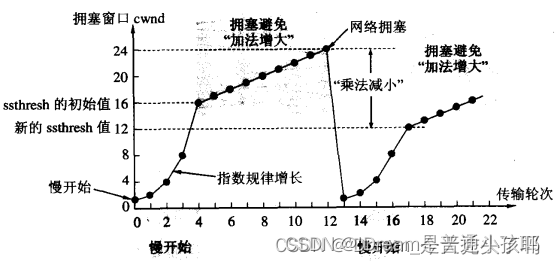
文章目录 0 赛题思路1 竞赛信息2 竞赛时间3 建模常见问题类型3.1 分类问题3.2 优化问题3.3 预测问题3.4 评价问题 4 建模资料 0 赛题思路 (赛题出来以后第一时间在CSDN分享) https://blog.csdn.net/dc_sinor?typeblog 1 竞赛信息 全国大学生数学建模…...
【Java】常见面试题:网络
目录 1. 为什么需要网络协议的分层?2. 【封装和分用】3. Socket套接字主要针对传输层协议划分为如下三类(了解)4. 简单说一下TCP和UDP的区别:5. TCP中的长短连接6. 应用层重点协议7. TCP可靠传输机制(三次握手四次挥手…...

TTS | VocGAN声码器训练自己的数据集
哈喽,今天给大家介绍的是如何使用VocGAN声码器训练自己的数据集。 原文 VocGAN: A High-Fidelity Real-time Vocoder with a Hierarchically-nested Adversarial Network 想要论文解读,请参考我的这篇文章~ 本博客主要包括以下内容: 目录…...

nuxt3--prisma配置
目录 一、初始化二、修改配置三、创建数据库表四、安装Prisma客户端五、查询数据库 一、初始化 npm install prisma typescript ts-node types/node --save-devts-node 用来执行main函数更新数据库 根据实际情况安装,如果不需要的话只需要安装prisma tsconfig.json…...
学习ts(一)数据类型(基础类型和任意类型)
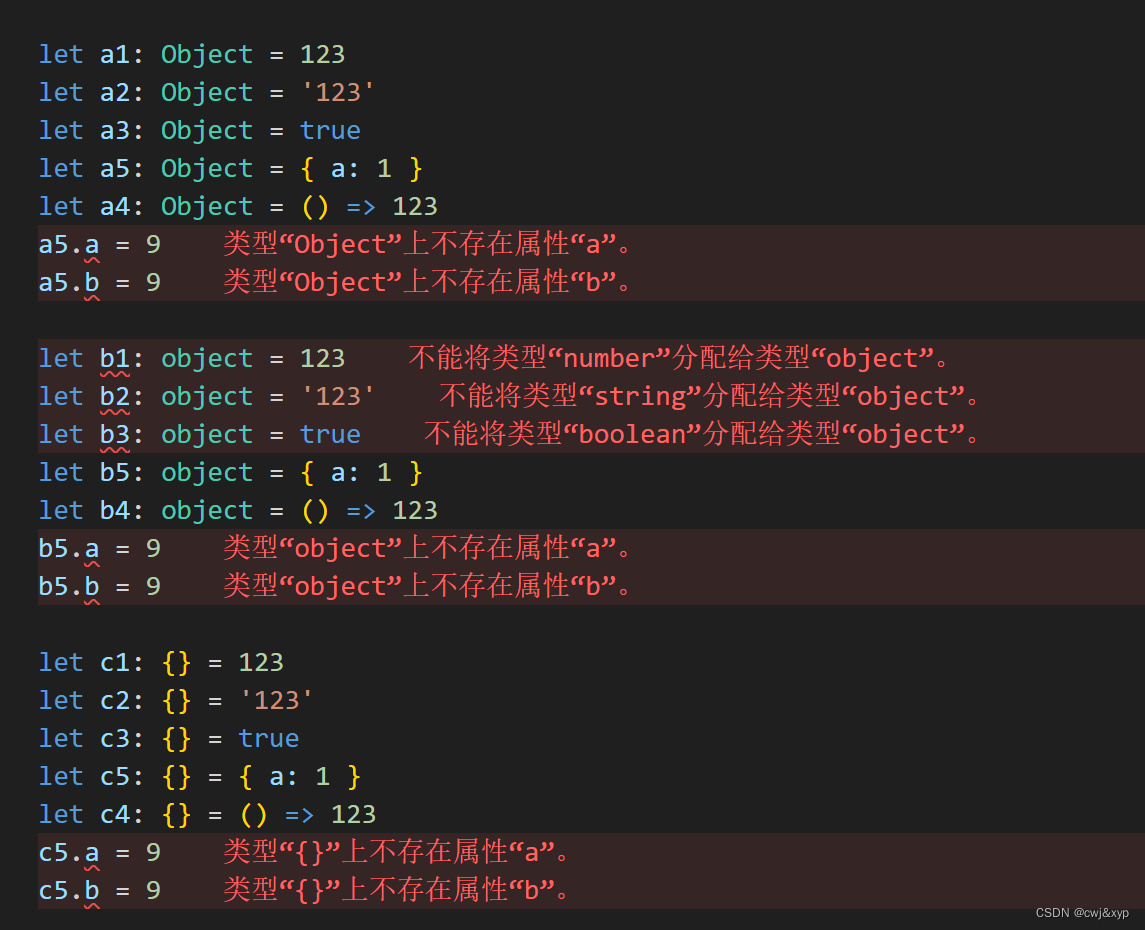
运行 起步安装 npm install typescript -g 运行tsc index.ts生成对应的js文件,然后使用node index.js执行js文件 为了方便运行还可以安装插件,ts-node index.ts运行即可 npm i ts-node -g npm init -y npm i types/node -D基本数据类型 // 1.字符…...
Qt 之 QPushButton,信号与槽机制
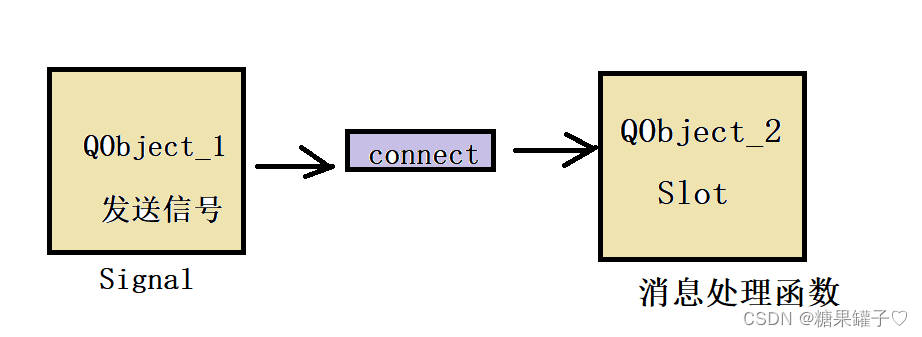
文章目录 前言一、QPushButton二、信号与槽机制总结 前言 一、QPushButton 当我们开发基于Qt框架的图形用户界面(GUI)应用程序时,经常需要在界面上添加按钮来实现用户交互。Qt提供了一个名为 QPushButton 的类作为按钮控件的实现。QPushButt…...

MySQL面试题一
MySQL 索引使用有哪些注意事项呢? 可以从两个维度回答这个问题: 索引哪些情况会失效,索引不适合哪些场景 索引哪些情况会失效 查询条件包含or,会导致索引失效。隐式类型转换,会导致索引失效, 例如age字…...

【Java】2021 RoboCom 机器人开发者大赛-高职组(复赛)题解
7-8 人工智能打招呼 号称具有人工智能的机器人,至少应该能分辨出新人和老朋友,所以打招呼的时候应该能有所区别。本题就请你为这个人工智能机器人实现这个功能:当它遇到陌生人的时候,会说:“Hello X, how are you?”其…...

使用electron-vue获取文件夹的路径
使用electron-vue获取文件夹的路径 记录一次开发过程中遇到的bug,我们的项目中需要将vue项目打包为桌面应用软件,为此我们引入了electron框架,在这个过程中,我们需要获取到用户电脑上面文件夹的绝对路径,用这篇文章记…...

剑指Offer14-II.剪绳子II C++
1、题目描述 给你一根长度为 n 的绳子,请把绳子剪成整数长度的 m 段(m、n都是整数,n>1并且m>1),每段绳子的长度记为 k[0],k[1]…k[m - 1] 。请问 k[0]k[1]…*k[m - 1] 可能的最大乘积是多少?例如&am…...
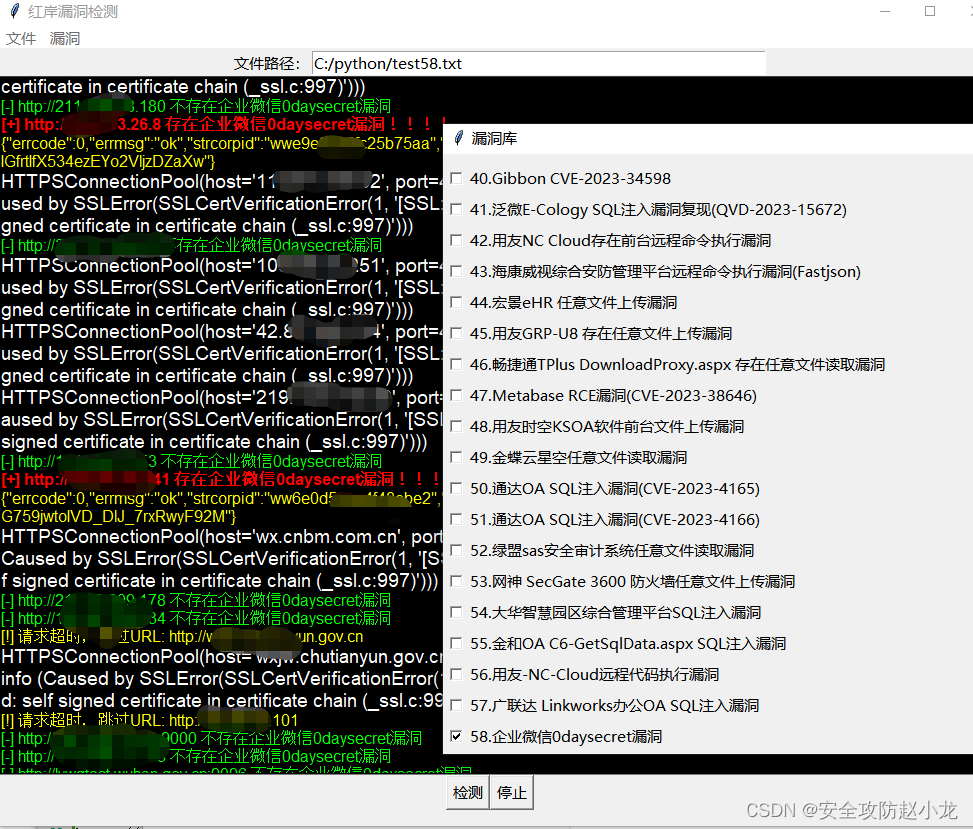
2023企业微信0day漏洞复现以及处理意见
2023企业微信0day漏洞复现以及处理意见 一、 漏洞概述二、 影响版本三、 漏洞复现小龙POC检测脚本: 四、 整改意见 免责声明:请勿利用文章内的相关技术从事非法测试,由于传播、利用此文所提供的信息或者工具而造成的任何直接或者间接的后果及损失&#x…...
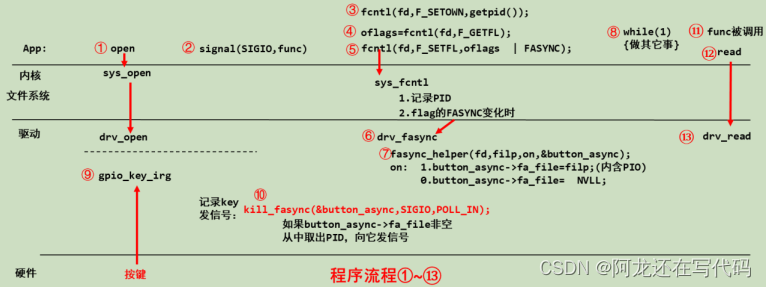
【IMX6ULL驱动开发学习】04.应用程序和驱动程序数据传输和交互的4种方式:非阻塞、阻塞、POLL、异步通知
一、数据传输 1.1 APP和驱动 APP和驱动之间的数据访问是不能通过直接访问对方的内存地址来操作的,这里涉及Linux系统中的MMU(内存管理单元)。在驱动程序中通过这两个函数来获得APP和传给APP数据: copy_to_usercopy_from_user …...
二叉树part07)
day-21 代码随想录算法训练营(19)二叉树part07
530.二叉搜索树的最小绝对差 思路一:二叉搜索树的中序遍历必为升序数组,加入数组后计算相邻两个数差值,即可求出最小绝对差 思路二:同样的思路,中序遍历,直接使用指针记录上一个节点,同时更新…...

【Vue3】依赖注入
provide 和 inject 是 Vue.js 中用于实现依赖注入的两个关联功能。它们允许你在祖先组件中提供数据,然后在子孙组件中注入这些数据,实现组件之间的数据共享和传递。 provide:provide 是一个选项,你可以在父组件中通过它来提供数据…...
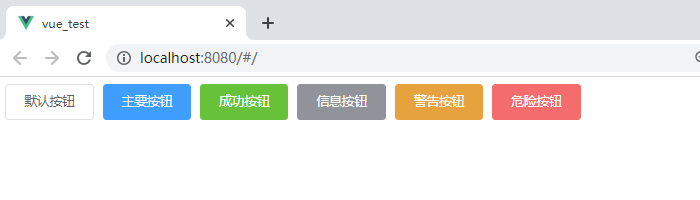
Vue 引入 Element-UI 组件库
Element-UI 官网地址:https://element.eleme.cn/#/zh-CN 完整引入:会将全部组件打包到项目中,导致项目过大,首次加载时间过长。 下载 Element-UI 一、打开项目,安装 Element-UI 组件库。 使用命令: npm …...
照耀国产的星火,再度上新!
国产之光,星火闪耀 ⭐ 新时代的星火⭐ 多模态能力⭐ 图像生成与虚拟人视频生成⭐ 音频生成与OCR笔记收藏⭐ 助手模式更新⭐ 插件能力⭐ 代码能力⭐ 写在最后 ⭐ 新时代的星火 在这个快速变革的时代,人工智能正迅猛地催生着前所未有的革命。从医疗到金融…...

大语言模型LLM的一些点
LLM发展史 GPT模型是一种自然语言处理模型,使用Transformer来预测下一个单词的概率分布,通过训练在大型文本语料库上学习到的语言模式来生成自然语言文本。 GPT-1(117亿参数),GPT-1有一定的泛化能力。能够用于和监督任务无关的任务中。GPT-2(…...

剪映专业版教程:制作直接选择排序算法原理演示视频
前言 今天教大家用剪映制作直接选择排序算法的原理演示视频。直接选择排序的原理是:在同一个数组中,先挑一个最小的,跟第一位交换;待排序下标往后移到第二位,从这里开始往后找一个最小的,跟第二位交换&…...

OmenSuperHub:惠普游戏本性能优化的终极免费解决方案
OmenSuperHub:惠普游戏本性能优化的终极免费解决方案 【免费下载链接】OmenSuperHub 使用 WMI BIOS控制性能和风扇速度,自动解除DB功耗限制。 项目地址: https://gitcode.com/gh_mirrors/om/OmenSuperHub OmenSuperHub是一款专为惠普OMEN游戏本设…...

从CubeMX到AD:为你的STM32F4项目创建‘带注释’原理图符号的完整指南
从CubeMX到AD:打造STM32F4项目专属原理图符号的工程实践 在嵌入式硬件开发中,原理图符号的清晰度直接影响着团队协作效率和后期维护成本。许多工程师都曾遇到过这样的困境:面对一个标准STM32芯片符号,需要反复查阅数据手册才能确认…...
3分钟终极指南:用trackerslist让你的BT下载速度提升5倍
3分钟终极指南:用trackerslist让你的BT下载速度提升5倍 【免费下载链接】trackerslist Updated list of public BitTorrent trackers 项目地址: https://gitcode.com/GitHub_Trending/tr/trackerslist 还在为BT下载速度慢而烦恼吗?trackerslist项…...

如何快速上手Meeko:分子对接参数化的完整指南
如何快速上手Meeko:分子对接参数化的完整指南 【免费下载链接】Meeko Interface for AutoDock, molecule parameterization 项目地址: https://gitcode.com/gh_mirrors/me/Meeko 想要在药物发现和分子相互作用研究中获得精准的对接结果吗?Meeko作…...

互联网大厂Java面试实录:严肃面试官 vs. 搞笑程序员谢飞机
互联网大厂Java面试实录:严肃面试官 vs. 搞笑程序员谢飞机第一轮:基础问题 面试官:你好,谢飞机。既然你是来应聘Java开发岗位的,那我先问一些简单的问题。第一个问题,Java中的HashMap是线程安全的吗&#x…...

完全掌握Windows驱动管理:DriverStore Explorer专业清理方案
完全掌握Windows驱动管理:DriverStore Explorer专业清理方案 【免费下载链接】DriverStoreExplorer Driver Store Explorer 项目地址: https://gitcode.com/gh_mirrors/dr/DriverStoreExplorer 你的Windows系统是否越用越慢,C盘空间不断减少却找不…...

3分钟掌握AI虚拟试衣:OOTDiffusion让你告别试衣间排队
3分钟掌握AI虚拟试衣:OOTDiffusion让你告别试衣间排队 【免费下载链接】OOTDiffusion [AAAI 2025] Official implementation of "OOTDiffusion: Outfitting Fusion based Latent Diffusion for Controllable Virtual Try-on" 项目地址: https://gitcode…...

Windows HEIC缩略图预览:告别iPhone照片在Windows的“盲盒“时代
Windows HEIC缩略图预览:告别iPhone照片在Windows的"盲盒"时代 【免费下载链接】windows-heic-thumbnails Enable Windows Explorer to display thumbnails for HEIC/HEIF files 项目地址: https://gitcode.com/gh_mirrors/wi/windows-heic-thumbnails …...

从串口调试到上位机显示:手把手教你用Python写一个STM32 OV2640的JPEG图传接收端
从串口调试到上位机显示:Python实现STM32 OV2640的JPEG图传接收端全解析 当STM32成功通过OV2640摄像头捕获JPEG图像并通过串口发送后,如何稳定接收、解析并实时显示这些数据成为开发者面临的下一个挑战。本文将深入探讨如何用Python构建一个高效可靠的上…...