【STM32】FreeRTOS消息队列和信号量学习
一、消息队列(queue)
队列是一种用于实现任务与任务之间,任务与中断之间消息交流的机制。
注意:1.数据的操作是FIFO模式。
2.队列需要明确数据的大小和队列的长度。
3.写和读都会出现堵塞。
实验:创建一个消息队列,两个发送任务,一个接收任务。
其中任务一任务三的等待时间为0,任务二的等待时间为portMAX_DELAY(死等)。
实现:在前一个项目的基础上进行更改【STM32】利用CubeMX对FreeRTOS用按键控制任务

void MX_FREERTOS_Init(void) {/* USER CODE BEGIN Init *//* USER CODE END Init *//* USER CODE BEGIN RTOS_MUTEX *//* add mutexes, ... *//* USER CODE END RTOS_MUTEX *//* Create the semaphores(s) *//* USER CODE BEGIN RTOS_SEMAPHORES *//* add semaphores, ... *//* USER CODE END RTOS_SEMAPHORES *//* USER CODE BEGIN RTOS_TIMERS *//* start timers, add new ones, ... *//* USER CODE END RTOS_TIMERS *//* Create the queue(s) *//* definition and creation of myQueue01 */osMessageQDef(myQueue01, 2, uint32_t);myQueue01Handle = osMessageCreate(osMessageQ(myQueue01), NULL);/* USER CODE BEGIN RTOS_QUEUES *//* add queues, ... *//* USER CODE END RTOS_QUEUES *//* Create the thread(s) *//* definition and creation of Task1 */osThreadDef(Task1, StartDefaultTask, osPriorityNormal, 0, 128);Task1Handle = osThreadCreate(osThread(Task1), NULL);/* definition and creation of Task2 */osThreadDef(Task2, StartTask02, osPriorityIdle, 0, 128);Task2Handle = osThreadCreate(osThread(Task2), NULL);/* definition and creation of Task3 */osThreadDef(Task3, StartTask03, osPriorityIdle, 0, 128);Task3Handle = osThreadCreate(osThread(Task3), NULL);/* USER CODE BEGIN RTOS_THREADS *//* add threads, ... *//* USER CODE END RTOS_THREADS */}/* USER CODE BEGIN Header_StartDefaultTask */
/*** @brief Function implementing the Task1 thread.* @param argument: Not used* @retval None*/
/* USER CODE END Header_StartDefaultTask */
void StartDefaultTask(void const * argument)
{/* USER CODE BEGIN StartDefaultTask *//* Infinite loop */BaseType_t xStatus;uint32_t Buf=10086;for(;;){if(HAL_GPIO_ReadPin(GPIOE,GPIO_PIN_3)==0){osDelay(20);if(HAL_GPIO_ReadPin(GPIOE,GPIO_PIN_3)==0){xStatus=xQueueSendToBack(myQueue01Handle,&Buf,0);if(xStatus!=pdTRUE){printf("NO1\r\n");osDelay(500);}else{printf("YES1%u\r\n",Buf);osDelay(500);}}}}/* USER CODE END StartDefaultTask */
}/* USER CODE BEGIN Header_StartTask02 */
/**
* @brief Function implementing the Task2 thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTask02 */
void StartTask02(void const * argument)
{/* USER CODE BEGIN StartTask02 *//* Infinite loop */BaseType_t xStatus;uint32_t Buf=66666;for(;;){ if(HAL_GPIO_ReadPin(GPIOE,GPIO_PIN_4)==0){osDelay(20);if(HAL_GPIO_ReadPin(GPIOE,GPIO_PIN_4)==0){xStatus=xQueueSendToBack(myQueue01Handle,&Buf,portMAX_DELAY);if(xStatus!=pdTRUE){printf("NO2\r\n");osDelay(500);}else{printf("YES2%u\r\n",Buf);osDelay(500);}}}}/* USER CODE END StartTask02 */
}/* USER CODE BEGIN Header_StartTask03 */
/**
* @brief Function implementing the Task3 thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTask03 */
void StartTask03(void const * argument)
{/* USER CODE BEGIN StartTask03 *//* Infinite loop *///BaseType_t xStatus;uint32_t Buf=0;for(;;){if(HAL_GPIO_ReadPin(GPIOE,GPIO_PIN_2)==0){osDelay(20);if(HAL_GPIO_ReadPin(GPIOE,GPIO_PIN_2)==0){printf("当前%u\r\n",Buf);//xStatus=xQueueReceive(myQueue01Handle,&Buf,portMAX_DELAY);if(xQueueReceive(myQueue01Handle,&Buf,portMAX_DELAY)!=pdTRUE){printf("NO3\r\n");}else{printf("YES3%u\r\n",Buf);}}}}/* USER CODE END StartTask03 */
}
现象:队列满了以后,任务一无法发送,任务二会死等,队列空闲以后完成发送。
二、信号量
消息队列用于传输多个数据,占用时间也相对较长,但有时只需要传输状态,因此引入信号量。信号量也是队列的一种。信号量有两种,如果它的量只有0(被拿走的状态)和1(被填入的状态)两种状态,就称为二进制的信号量;当量的状态大于两种,就称为计数型信号量。
1.二值信号量
实验:任务一:按键采集数据;任务二:拿走以后串口发送信息
实现:

void MX_FREERTOS_Init(void) {/* USER CODE BEGIN Init *//* USER CODE END Init *//* USER CODE BEGIN RTOS_MUTEX *//* add mutexes, ... *//* USER CODE END RTOS_MUTEX *//* Create the semaphores(s) *//* definition and creation of myBinarySem01 */osSemaphoreDef(myBinarySem01);myBinarySem01Handle = osSemaphoreCreate(osSemaphore(myBinarySem01), 1);/* USER CODE BEGIN RTOS_SEMAPHORES *//* add semaphores, ... *//* USER CODE END RTOS_SEMAPHORES *//* USER CODE BEGIN RTOS_TIMERS *//* start timers, add new ones, ... *//* USER CODE END RTOS_TIMERS *//* Create the queue(s) *//* definition and creation of myQueue01 */osMessageQDef(myQueue01, 2, uint32_t);myQueue01Handle = osMessageCreate(osMessageQ(myQueue01), NULL);/* USER CODE BEGIN RTOS_QUEUES *//* add queues, ... *//* USER CODE END RTOS_QUEUES *//* Create the thread(s) *//* definition and creation of Task1 */osThreadDef(Task1, StartDefaultTask, osPriorityNormal, 0, 128);Task1Handle = osThreadCreate(osThread(Task1), NULL);/* definition and creation of Task2 */osThreadDef(Task2, StartTask02, osPriorityNormal, 0, 128);Task2Handle = osThreadCreate(osThread(Task2), NULL);/* definition and creation of Task3 */osThreadDef(Task3, StartTask03, osPriorityNormal, 0, 128);Task3Handle = osThreadCreate(osThread(Task3), NULL);/* USER CODE BEGIN RTOS_THREADS *//* add threads, ... *//* USER CODE END RTOS_THREADS */}/* USER CODE BEGIN Header_StartDefaultTask */
/*** @brief Function implementing the Task1 thread.* @param argument: Not used* @retval None*/
/* USER CODE END Header_StartDefaultTask */
void StartDefaultTask(void const * argument)
{/* USER CODE BEGIN StartDefaultTask *//* Infinite loop */BaseType_t xStatus;uint32_t Buf=10086;for(;;){
// {if(HAL_GPIO_ReadPin(GPIOE,GPIO_PIN_3)==0){osDelay(20);if(HAL_GPIO_ReadPin(GPIOE,GPIO_PIN_3)==0){
// xStatus=xQueueSendToBack(myQueue01Handle,&Buf,0);if(xSemaphoreGive(myBinarySem01Handle)==pdTRUE){printf("NO1\r\n");}else{printf("YES1%u\r\n",Buf);}}}}/* USER CODE END StartDefaultTask */
}/* USER CODE BEGIN Header_StartTask03 */
/**
* @brief Function implementing the Task3 thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTask03 */
void StartTask03(void const * argument)
{/* USER CODE BEGIN StartTask03 *//* Infinite loop */ uint32_t Buf=0;for(;;){if(HAL_GPIO_ReadPin(GPIOE,GPIO_PIN_2)==0){osDelay(20);if(HAL_GPIO_ReadPin(GPIOE,GPIO_PIN_2)==0){ if(xSemaphoreTake(myBinarySem01Handle,0)==pdTRUE){printf("YES3\r\n");}else{printf("NO3%u\r\n",Buf);}}}}/* USER CODE END StartTask03 */
}
现象:当按键释放了信号量,串口才能成功发送信息。
2.记数型信号量
实验:任务一 :按键一记录人进来;按键二记录人出去;(最多有10个人)
任务二:串口每隔3S打印人数。
实现:
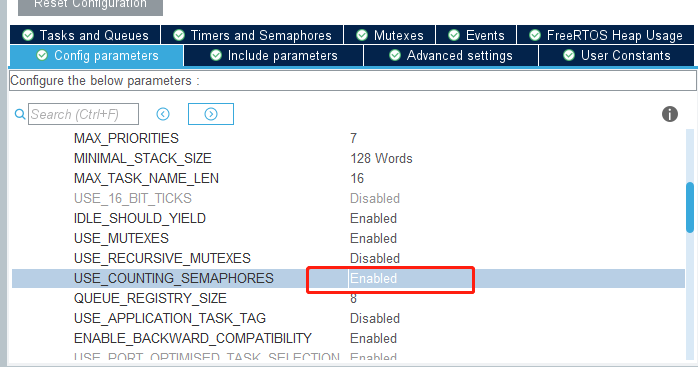
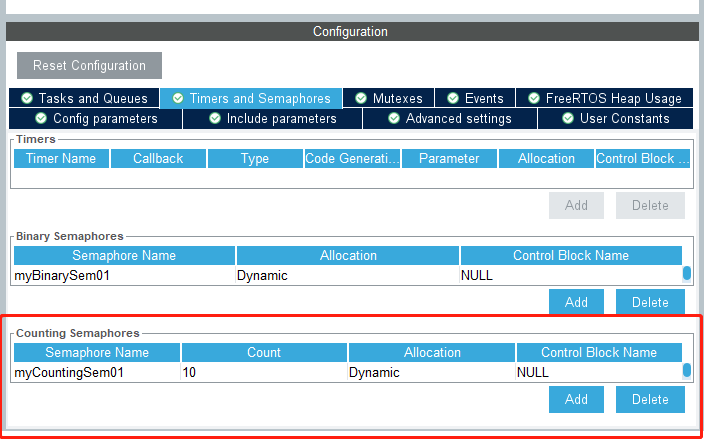
void MX_FREERTOS_Init(void) {/* USER CODE BEGIN Init *//* USER CODE END Init *//* USER CODE BEGIN RTOS_MUTEX *//* add mutexes, ... *//* USER CODE END RTOS_MUTEX *//* Create the semaphores(s) *//* definition and creation of myBinarySem01 */osSemaphoreDef(myBinarySem01);myBinarySem01Handle = osSemaphoreCreate(osSemaphore(myBinarySem01), 1);/* definition and creation of myCountingSem01 */osSemaphoreDef(myCountingSem01);myCountingSem01Handle = osSemaphoreCreate(osSemaphore(myCountingSem01), 10);/* USER CODE BEGIN RTOS_SEMAPHORES *//* add semaphores, ... *//* USER CODE END RTOS_SEMAPHORES *//* USER CODE BEGIN RTOS_TIMERS *//* start timers, add new ones, ... *//* USER CODE END RTOS_TIMERS *//* Create the queue(s) *//* definition and creation of myQueue01 */osMessageQDef(myQueue01, 2, uint32_t);myQueue01Handle = osMessageCreate(osMessageQ(myQueue01), NULL);/* USER CODE BEGIN RTOS_QUEUES *//* add queues, ... *//* USER CODE END RTOS_QUEUES *//* Create the thread(s) *//* definition and creation of Task1 */osThreadDef(Task1, StartDefaultTask, osPriorityNormal, 0, 128);Task1Handle = osThreadCreate(osThread(Task1), NULL);/* definition and creation of Task2 */osThreadDef(Task2, StartTask02, osPriorityNormal, 0, 128);Task2Handle = osThreadCreate(osThread(Task2), NULL);/* definition and creation of Task3 */osThreadDef(Task3, StartTask03, osPriorityNormal, 0, 128);Task3Handle = osThreadCreate(osThread(Task3), NULL);/* USER CODE BEGIN RTOS_THREADS *//* add threads, ... *//* USER CODE END RTOS_THREADS */}/* USER CODE BEGIN Header_StartDefaultTask */
/*** @brief Function implementing the Task1 thread.* @param argument: Not used* @retval None*/
/* USER CODE END Header_StartDefaultTask */
void StartDefaultTask(void const * argument)
{/* USER CODE BEGIN StartDefaultTask *//* Infinite loop */for(;;){if(HAL_GPIO_ReadPin(GPIOE,GPIO_PIN_3)==0){osDelay(20);if(HAL_GPIO_ReadPin(GPIOE,GPIO_PIN_3)==0){if(xSemaphoreGive(myCountingSem01Handle)!=pdTRUE){printf("NO1\r\n");}else{printf("YES1\r\n");}}}if(HAL_GPIO_ReadPin(GPIOE,GPIO_PIN_4)==0){osDelay(20);if(HAL_GPIO_ReadPin(GPIOE,GPIO_PIN_4)==0){if(xSemaphoreTake(myCountingSem01Handle,0)!=pdTRUE){printf("NO2\r\n");}else{printf("YES2\r\n");}}}}/* USER CODE END StartDefaultTask */
}/* USER CODE BEGIN Header_StartTask02 */
/**
* @brief Function implementing the Task2 thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTask02 */
void StartTask02(void const * argument)
{/* USER CODE BEGIN StartTask02 *//* Infinite loop */for(;;){}/* USER CODE END StartTask02 */
}/* USER CODE BEGIN Header_StartTask03 */
/**
* @brief Function implementing the Task3 thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTask03 */
void StartTask03(void const * argument)
{/* USER CODE BEGIN StartTask03 *//* Infinite loop */for(;;){printf("possess %d people\r\n",(uint16_t)uxSemaphoreGetCount(myCountingSem01Handle));osDelay(3000);}/* USER CODE END StartTask03 */
}
因为用了函数
myCountingSem01Handle = osSemaphoreCreate(osSemaphore(myCountingSem01), 10);默认当前计数值为满值。如果设置为0,使用下面的函数:
myCountingSem01Handle=xSemaphoreCreateCounting(10,0);现象:通过按键一和二实现记录人数,并串口打印了当前人数。
相关文章:
【STM32】FreeRTOS消息队列和信号量学习
一、消息队列(queue) 队列是一种用于实现任务与任务之间,任务与中断之间消息交流的机制。 注意:1.数据的操作是FIFO模式。 2.队列需要明确数据的大小和队列的长度。 3.写和读都会出现堵塞。 实验:创建一个消息队列…...
初始C语言(6)——详细讲解表达式求值以及其易错点
系列文章目录 第一章 “C“浒传——初识C语言(1)(更适合初学者体质哦!) 第二章 初始C语言(2)——详细认识分支语句和循环语句以及他们的易错点 第三章 初阶C语言(3)——…...
【数据结构】树和二叉树
一、树的概念及结构 1、树的概念 树 是一种非线性的数据结构,它是由n(n>0)个有限结点组成一个具有层次关系的集合。把它叫做树是因 为它看起来像一棵倒挂的树,也就是说它是根朝上,而叶朝下的。 有一个特殊的结点&a…...

GPIO 配置 和 PINCTRL有啥区别
GPIO(通用输入/输出)和 PINCTRL(引脚控制器)是在嵌入式系统中用于管理和控制硬件引脚的关键概念。它们在硬件层面上起着不同的作用。 GPIO配置: GPIO 是一种通用的硬件接口,用于控制和读取数字信号。每个 …...

GPT法律领域
法律领域 LaWGPT Github: https://github.com/pengxiao-song/LaWGPT 简介:基于中文法律知识的大语言模型。 数据:基于中文裁判文书网公开法律文书数据、司法考试数据等数据集展开,利用Stanford_alpaca、self-instruct方式生成对话问答数据…...
、alignof and alignas(类型对齐)))
【C++11保姆级教程】Type aliases(类型别名)、alignof and alignas(类型对齐))
文章目录 前言一、类型别名(Type aliases)1.1类型别名是什么?1.2使用方法1.3实际使用1.4优势 二、类型对齐(alignof and alignas)2.1类型对齐的概念2.2类型对齐快速理解2.3具体使用2.4示例代码 总结 前言 在C11标准中…...
地址解析协议-ARP
ARP协议 无论网络层使用何种协议,在实际网络的链路上传输数据帧时,最终必须使用硬件地址 地址解析协议(Address Resolution Protocol,ARP):完成IP地址到MAC地址的映射,每个主机都有一个ARP高速缓…...

Java线程
文章目录 一、Thread类1.1创建线程1.2Thread类中的一些构造方法1.3Thread类中的一些属性1.4线程的终止/打断1.5线程等待1.6获取当前线程的引用1.7休眠当前线程 二、线程的状态 一、Thread类 线程是操作系统的概念,操作系统内核实现了线程这样的机制,系统…...
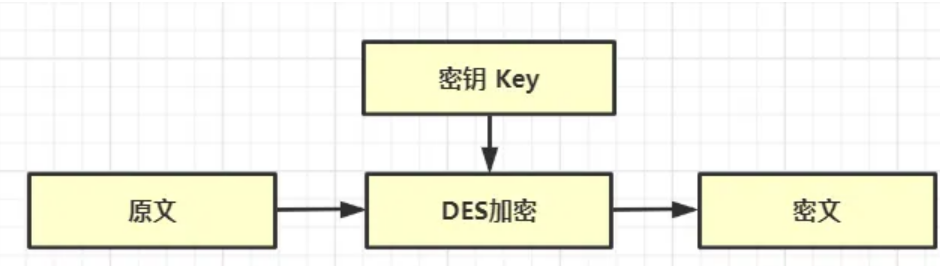
C语言如何实现DES加密与解密
C语言实现DES加密解密 #include "des.h" //移位表 static Table_size const shiftTable[NumberOfKeys] {1, 1, 2, 2, 2, 2, 2, 2, 1, 2, 2, 2, 2, 2, 2, 1}; //E扩展表 static Table_size const eTable[des_key_pc2_standard]{32, 1, 2, 3, 4, 5, 4, 5, 6, …...
)
【笔记】优先队列(priority_queue/set)
目录 大根堆 小根堆 set(小根堆) 大根堆 题目链接:洛谷 P3243 菜肴制作 题目描述 知名美食家小 A 被邀请至 ATM 大酒店,为其品评菜肴。ATM 酒店为小 A 准备了 n 道菜肴,酒店按照为菜肴预估的质量从高到低给予 1 到…...
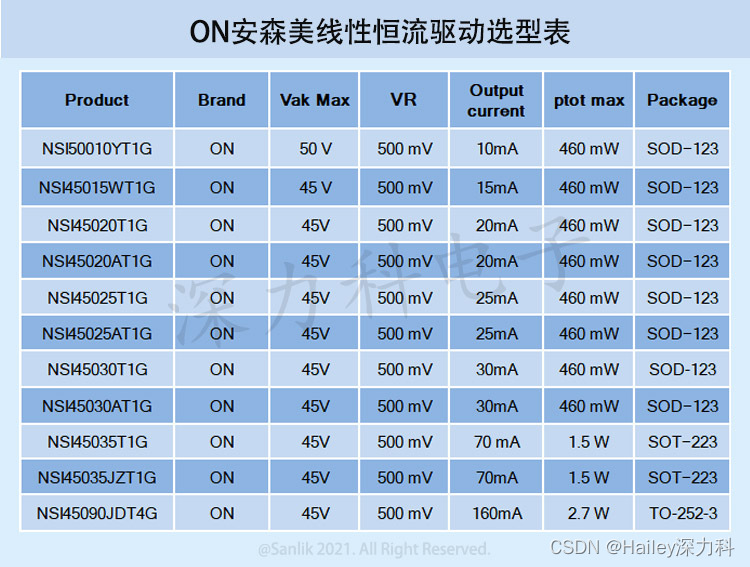
看看安森美深力科NSI45090JDT4G 是如何点亮汽车内外照明系统解决方案
关于线性恒流调节器(CCR):是一种用于控制电流的稳定输出。它通常由一个功率晶体管和一个参考电流源组成。CCR的工作原理是通过不断调节功率晶体管的导通时间来维持输出电流的恒定。当输出电流超过设定值时,CCR会减少功率晶体管的导…...

Linux进阶之Shell-sed
基本用法: sed 选项 “指令” 文件 常用选项: -e --它告诉sed将下一个参数解释为一个sed指令,只有当命令行上给出多个sed指令时使用 -f --后跟保存了sed指令的文件 -i --直接对内容进行修改,不加 i 时默认只是预…...

前端高频面试题 Day02
面试题 var 和 let const 的区别 var 是 ES5 及之前的语法,let const 是 ES6 语法var 和 let 是变量,可修改;const 是常量,不可修改var 有变量提升,let const 没有var 没有块级作用域,let const 有 &…...
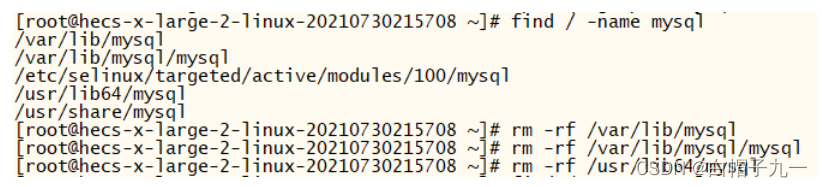
MYSQL完全卸载、安装与账号创建、权限控制
一、卸载mysql CentOS 卸载 MySQL 1. 查看安装情况 使用以下命令查看当前安装mysql情况,查找以前是否装有mysql rpm -qa|grep -i mysql这里显示我安装的 MySQL 服务有有: 2. 停止 mysql 服务、删除之前安装的 mysql 删除命令:rpm -e –n…...

get与post如何拼接url与数据的灵活处理,循环的重要性。
get与post拼接url地址不同: let postData {method: "post",data: {op: "/api/setting/maintenanceperiod?period"this.authorizationCode,loadingConfig: {},data: {period:this.authorizationCode}}}; if(this.editData.id){let postData …...
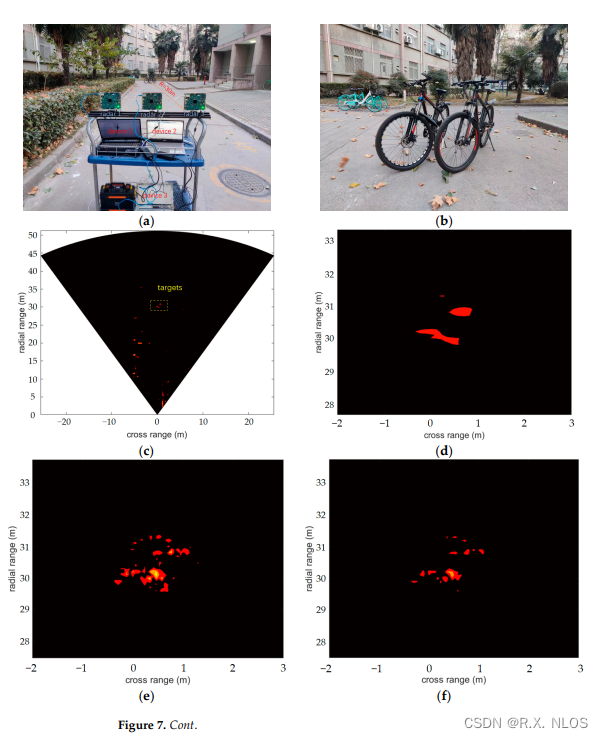
Remote Sensing,2023 | 基于SBL的分布式毫米波相干雷达成像的高效实现
Remote Sensing,2023 | 基于SBL的分布式毫米波相干雷达成像的高效实现 注1:本文系“无线感知论文速递”系列之一,致力于简洁清晰完整地介绍、解读无线感知领域最新的顶会/顶刊论文(包括但不限于 Nature/Science及其子刊; MobiCom, Sigcom, MobiSys, NSDI…...
Android学习之路(5) UI控件之Button (按钮)与 ImageButton (图像按钮)
本节引言: 今天给大家介绍的Android基本控件中的两个按钮控件,Button普通按钮和ImageButton图像按钮; 其实ImageButton和Button的用法基本类似,至于与图片相关的则和后面ImageView相同,所以本节 只对Button进行讲解&am…...
)
Day 31 C++ STL常用算法(下)
文章目录 常用拷贝和替换算法copy——容器内指定范围的元素拷贝到另一容器中函数原型注意——利用copy算法在拷贝时,目标容器要提前开辟空间示例 replace——将容器内指定范围的第一个旧元素修改为新元素函数原型注意——replace只会替换区间内满足条件的第一个旧元…...

【Android Studio】 win11 安装配置 jdk17 超详细
概述 一个好的安装教程能够帮助开发者完成更便捷、更快速的开发。书山有路勤为径,学海无涯苦作舟。我是秋知叶i、期望每一个阅读了我的文章的开发者都能够有所成长。 一、下载JDK JDK官网 这里下载 JDK17 windows x64 installer 二、安装JDK 双击打开下载的 j…...
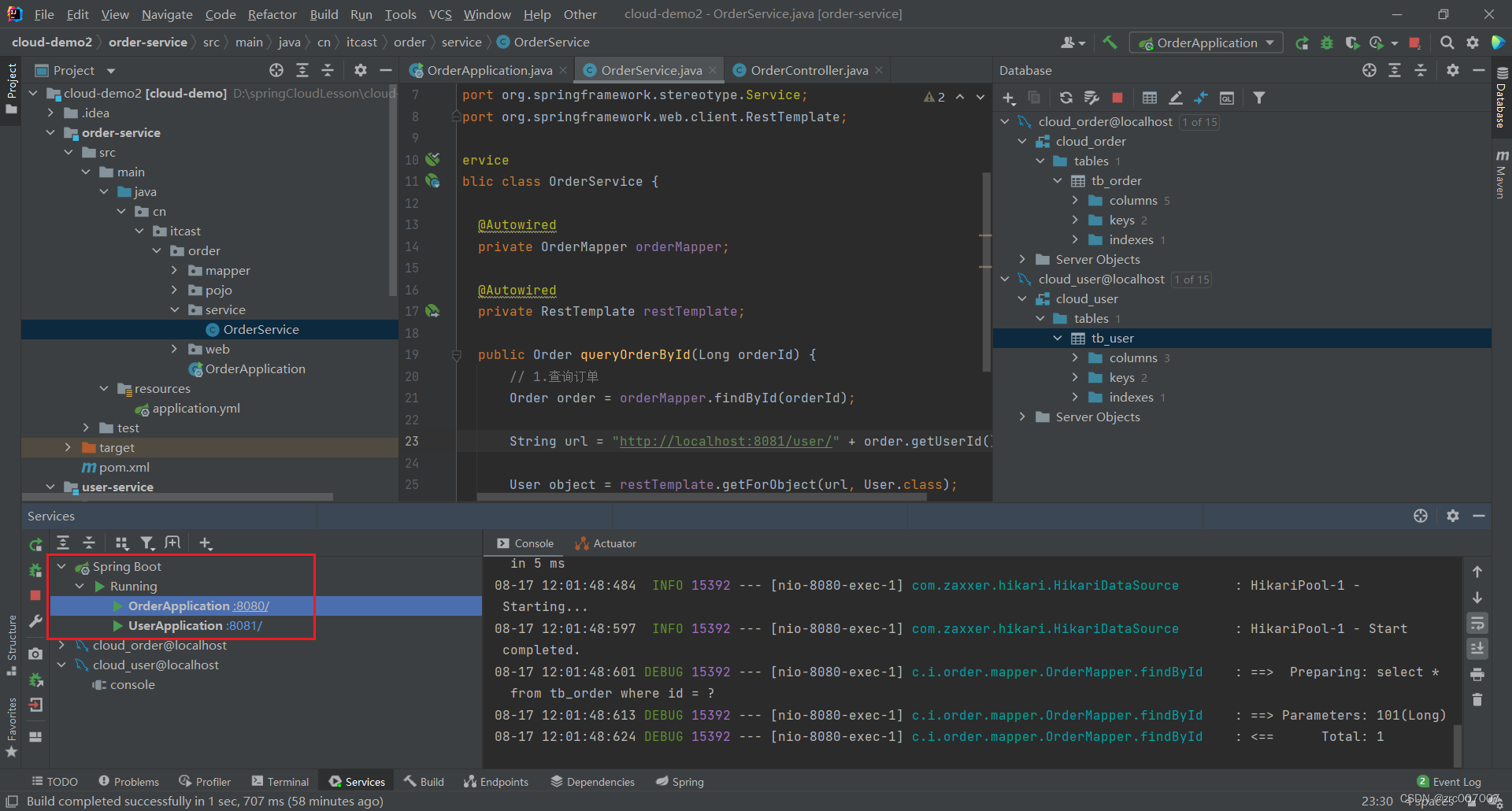
IDEA下方工具栏SideBar没有Services解决方法 IDEA配合微服务学习多端口管理打开Services栏方法
问题 微服务学习时,一次要打开多个端口,比如8080给order模块、8081给user模块……这就需要用idea管理多端口。 这时候就可以用到Services栏进行管理。 解决 首先看下方Sidebar没有Services。 打开Services 打开方式一:手动打开 在IDEA中…...

告别枯燥协议!用Python脚本+逻辑分析仪实测JESD204B的F和K参数
告别枯燥协议!用Python脚本逻辑分析仪实测JESD204B的F和K参数 在高速串行通信领域,JESD204B协议因其高效率而备受青睐,但抽象的参数定义常常让工程师望而生畏。本文将以一种全新的实践视角,带您通过Python脚本和逻辑分析仪&#x…...

2009-2024年日本人口统计数据
本数据集为日本多层级行政区划的人口统计数据,涵盖都道府县、城市以及政令指定都市的市区三级空间单元,记录了人口规模、结构及动态变化等核心指标。数据可用于人口演变分析、区域发展研究及空间计量模型构建。基于此数据集,可系统开展以下研…...

终极指南:5个简单步骤让魔兽争霸3在现代电脑上完美运行
终极指南:5个简单步骤让魔兽争霸3在现代电脑上完美运行 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper WarcraftHelper是一款专为魔兽争霸…...

CLI工具集claw:模块化设计与插件化架构深度解析
1. 项目概述:一个面向开发者的现代化CLI工具集最近在GitHub上看到一个名为opsyhq/claw的项目,第一眼就被它简洁的名字吸引了。claw,中文意思是“爪子”,听起来就很有力量感和抓取感。点进去一看,果然,这是一…...

30+输入法词库互转:一站式零门槛解决方案真的存在吗?
30输入法词库互转:一站式零门槛解决方案真的存在吗? 【免费下载链接】imewlconverter ”深蓝词库转换“ 一款开源免费的输入法词库转换程序 项目地址: https://gitcode.com/gh_mirrors/im/imewlconverter 你是否曾因更换输入法而不得不放弃多年积…...

告别内存焦虑!手把手教你读懂中科蓝讯AB530X的ram.ld文件,精准控制RAM复用
告别内存焦虑!手把手教你读懂中科蓝讯AB530X的ram.ld文件,精准控制RAM复用 第一次打开中科蓝讯AB530X的ram.ld文件时,那些密密麻麻的符号和数字让我头皮发麻。作为一款主打性价比的蓝牙芯片,AB530X的RAM资源相当有限——就像在寸土…...

学生用户画像-利用ETL零代码构建考勤主题标签
1 实验说明 1.1 实验目的 依托 “数智教育” 大赛数据集搭建学生考勤 ETL 转换流,掌握 ETL 全流程,解决校园考勤统计低效、标准不一问题;优化空值处理,输出精准多维度考勤数据,支撑校园考勤管理。 1.2 实验环境 工…...

数字IC设计八股:面试题合集
锁存器的结构-DFF的结构-建立保持时间-亚稳态-STA-CDC。 亚稳态的成因,危害,解决方法。 建立保持时间的计算,违例的Fix,流片前和流片后。还有复位的Recovery Removal time。 CDC的解决方法。 低功耗常见设计方法,动态-静态功耗计算和分析。例如两种情况对比功耗大小。…...

Eviews面板数据回归实战:手把手教你用Hausman检验搞定固定效应与随机效应模型选择
Eviews面板数据回归实战:Hausman检验在固定与随机效应模型选择中的应用 计量经济学研究中,面板数据分析因其能同时捕捉时间和个体维度的信息而备受青睐。但面对固定效应(FE)和随机效应(RE)模型的选择,许多研究者常常陷入困惑。本文将带您深入…...

从Launch/Capture路径理解CRPR:一个例子讲清楚它在Setup/Hold检查中的关键作用
从Launch/Capture路径理解CRPR:一个例子讲清楚它在Setup/Hold检查中的关键作用 在芯片后端设计中,时序分析是确保电路功能正确的关键环节。当我们谈论时钟路径分析时,CRPR(Clock Reconvergence Pessimism Removal)是一…...