基于单片机DHT11温湿度NRF2401无线通信控制系统
一、系统方案
本设计采用STC89C5单片机作为主控制器,从机采用DHT11传感器采集温湿度、按键设置报警阀值,液晶1602显示,蜂鸣器报警,无线NRF2401模块。

二、硬件设计
原理图如下:

三、单片机软件设计
1、首先是系统初始化:
init_io(); // 初始化IO
RX_Mode(); // 设置为接收模式
LCD_Initial(); //液晶初始化
2、液晶显示程序
//1602程序
//内部等待函数*************************************************************
unsigned char LCD_Wait(void)
{
RS=0;
RW=1; nop();
E=1; nop();
E=0;
return DBPort;
}
//向LCD写入命令或数据********************************************************
#define LCD_COMMAND 0 // Command
#define LCD_DATA 1 // Data
#define LCD_CLEAR_SCREEN 0x01 // 清屏
#define LCD_HOMING 0x02 // 光标返回原点
void LCD_Write(bit style, unsigned char input)
{
E=0;
RS=style;
RW=0; nop();
DBPort=input; nop();//注意顺序
E=1; nop();//注意顺序
E=0; nop();
LCD_Wait();
}
//设置显示模式************************************************************
#define LCD_SHOW 0x04 //显示开
#define LCD_HIDE 0x00 //显示关
#define LCD_CURSOR 0x02 //显示光标
#define LCD_NO_CURSOR 0x00 //无光标
#define LCD_FLASH 0x01 //光标闪动
#define LCD_NO_FLASH 0x00 //光标不闪动
void LCD_SetDisplay(unsigned char DisplayMode)
{
LCD_Write(LCD_COMMAND, 0x08|DisplayMode);
}
//设置输入模式************************************************************
#define LCD_AC_UP 0x02
#define LCD_AC_DOWN 0x00 // default
#define LCD_MOVE 0x01 // 画面可平移
#define LCD_NO_MOVE 0x00 //default
void LCD_SetInput(unsigned char InputMode)
{
LCD_Write(LCD_COMMAND, 0x04|InputMode);
}
//初始化LCD************************************************************
void LCD_Initial()
{
E=0;
LCD_Write(LCD_COMMAND,0x38); //8位数据端口,2行显示,5*7点阵
LCD_Write(LCD_COMMAND,0x38);
LCD_SetDisplay(LCD_SHOW|LCD_NO_CURSOR); //开启显示, 无光标
LCD_Write(LCD_COMMAND,LCD_CLEAR_SCREEN); //清屏
LCD_SetInput(LCD_AC_UP|LCD_NO_MOVE); //AC递增, 画面不动
}
//液晶字符输入的位置************************
void GotoXY(unsigned char x, unsigned char y)
{
if(y0)
LCD_Write(LCD_COMMAND,0x80|x);
if(y1)
LCD_Write(LCD_COMMAND,0x80|(x-0x40));
}
//将字符输出到液晶显示
void Print(unsigned char *str)
{
while(*str!=‘\0’)
{
LCD_Write(LCD_DATA,*str);
str++;
}
}
3、按键检测程序
void key()
{
if (k10) //调整按键检测
{
delay(10);
if (k10)
{
presskeynum++;
if(presskeynum5)
presskeynum=0;
while(k10);
LCD_Write(LCD_COMMAND,LCD_CLEAR_SCREEN); //清屏
}
}
if(presskeynum1)//温度上限设置
{
if(k20)// 加
{
delay(10);
temp_high++;
if (temp_high>99)
temp_high=0;
if (temp_high<0)
temp_high=99;
while(k20); //加上此句必须松按键才处理
}
if(k30)//减
{
delay(10);
temp_high–;
if (temp_high>99)
temp_high=0;
if (temp_high<0)
temp_high=99;
while(k30); //加上此句必须松按键才处理
}
}
if(presskeynum2)//温度下限设置
{
if(k20)// 加
{
delay(10);
temp_low++;
if (temp_low>99)
temp_low=0;
if (temp_low<0)
temp_low=99;
while(k20);
}
if(k30)
{
delay(10);
temp_low–;
if (temp_low>99)
temp_low=0;
if (temp_low<0)
temp_low=99;
while(k30);
}
}
if(presskeynum3)//湿度上限设置
{
if(k20)// 加
{
delay(10);
humi_high++;
if (humi_high>99)
humi_high=0;
if (humi_high<0)
humi_high=99;
while(k20);
}
if(k30)
{
delay(10);
humi_high–;
if (humi_high>99)
humi_high=0;
if (humi_high<0)
humi_high=99;
while(k30);
}
}
if(presskeynum4)//湿度下限设置
{
if(k20)//加
{
delay(10);
humi_low++;
if (humi_low>99)
humi_low=0;
if (humi_low<0)
humi_low=99;
while(k20);
}
if(k30)// 减
{
delay(10);
humi_low–;
if (humi_low>99)
humi_low=0;
if (humi_low<0)
humi_low=99;
while(k30);
}
}
if(k40)// 退出键
{
delay(10);
if(k40)
{
while(k4==0);
presskeynum=0;
LCD_Write(LCD_COMMAND,LCD_CLEAR_SCREEN); //清屏}
}
}
4、核心算法程序
/**************************************************/
/**************************************************
*函数名: SPI_RW
*函数功能: 读写一个字节
*输入: 无
*输出: 无
//
uchar SPI_RW(uchar byte)
{
uchar i;
for(i=0; i<8; i++) // 循环8次
{
MOSI = (byte & 0x80); // byte最高位输出到MOSI
byte <<= 1; // 低一位移位到最高位
SCK = 1; // 拉高SCK,nRF24L01从MOSI读取1位数据,同时从MISO输出1位数据
byte |= MISO; // 读MISO到byte最低位
SCK = 0; // SCK置低
}
return(byte); // 返回读取一个字节
}
//
/**************************************************
*函数名: SPI_RW_Reg
*函数功能: 写数据到reg
*输入: 无
*输出: 无
//
uchar SPI_RW_Reg(uchar reg, uchar value)
{
uchar status;
CSN = 0; // CSN置低,开始传输数据
status = SPI_RW(reg); // 选择寄存器,同时返回状态字
SPI_RW(value); // 写数据到寄存器
CSN = 1; // CSN拉高,结束数据传输
return(status); // 返回状态寄存器
}
//
/**************************************************
*函数名: SPI_Read
*函数功能: 从reg寄存器读字节
*输入: 无
*输出: 无
/**************************************************/
uchar SPI_Read(uchar reg)
{
uchar reg_val;CSN = 0; // CSN置低,开始传输数据SPI_RW(reg); // 选择寄存器reg_val = SPI_RW(0); // 然后从该寄存器读数据CSN = 1; // CSN拉高,结束数据传输return(reg_val); // 返回寄存器数据
}
/**************************************************/
/**************************************************
*函数名: SPI_Read_Buf
*函数功能: 从reg寄存器读数据
*输入: 无
*输出: 无
//
uchar SPI_Read_Buf(uchar reg, uchar * pBuf, uchar bytes)
{
uchar status, i;
CSN = 0; // CSN置低,开始传输数据
status = SPI_RW(reg); // 选择寄存器,同时返回状态字
for(i=0; i<bytes; i++)
pBuf[i] = SPI_RW(0); // 逐个字节从nRF24L01读出
CSN = 1; // CSN拉高,结束数据传输
return(status); // 返回状态寄存器
}
//
/**************************************************
*函数名: SPI_Write_Buf
*函数功能: 把缓存的数据写入NRF
*输入: 无
*输出: 无
//
uchar SPI_Write_Buf(uchar reg, uchar * pBuf, uchar bytes)
{
uchar status, i;
CSN = 0; // CSN置低,开始传输数据
status = SPI_RW(reg); // 选择寄存器,同时返回状态字
for(i=0; i<bytes; i++)
SPI_RW(pBuf[i]); // 逐个字节写入nRF24L01
CSN = 1; // CSN拉高,结束数据传输
return(status); // 返回状态寄存器
}
//
/**************************************************
*函数名: RX_Mode
*函数功能: 将nrf设置为接收模式
*输入: 无
*输出: 无
//
void RX_Mode(void)
{
CE = 0;
SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, TX_ADDRESS, TX_ADR_WIDTH); // 接收设备接收通道0使用和发送设备相同的发送地址
SPI_RW_Reg(WRITE_REG + EN_AA, 0x01); // 使能接收通道0自动应答
SPI_RW_Reg(WRITE_REG + EN_RXADDR, 0x01); // 使能接收通道0
SPI_RW_Reg(WRITE_REG + RF_CH, 40); // 选择射频通道0x40
SPI_RW_Reg(WRITE_REG + RX_PW_P0, TX_PLOAD_WIDTH); // 接收通道0选择和发送通道相同有效数据宽度
SPI_RW_Reg(WRITE_REG + RF_SETUP, 0x07); // 数据传输率1Mbps,发射功率0dBm,低噪声放大器增益
SPI_RW_Reg(WRITE_REG + CONFIG, 0x0f); // CRC使能,16位CRC校验,上电,接收模式
delay_ms(150);
CE = 1; // 拉高CE启动接收设备
}
//
/**************************************************
*函数名: TX_Mode
*函数功能: 将nrf设置为发送模式
*输入: 无
*输出: 无
//
void TX_Mode(uchar * BUF)
{
CE = 0;
SPI_Write_Buf(WRITE_REG + TX_ADDR, TX_ADDRESS, TX_ADR_WIDTH); // 写入发送地址
SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, TX_ADDRESS, TX_ADR_WIDTH); // 应答接收设备,接收通道0地址和发送地址相同
SPI_Write_Buf(WR_TX_PLOAD, BUF, TX_PLOAD_WIDTH); // 写数据包到TX FIFO
SPI_RW_Reg(WRITE_REG + EN_AA, 0x01); // 使能接收通道0自动应答
SPI_RW_Reg(WRITE_REG + EN_RXADDR, 0x01); // 使能接收通道0
SPI_RW_Reg(WRITE_REG + SETUP_RETR, 0x0a); // 自动重发延时等待250us+86us,自动重发
SPI_RW_Reg(WRITE_REG + RF_CH, 40); // 选择射频通道0x40
SPI_RW_Reg(WRITE_REG + RF_SETUP, 0x07); // 数据传输率1Mbps,发射功率0dBm,低噪声放大器增益
SPI_RW_Reg(WRITE_REG + CONFIG, 0x0e); // CRC使能,16位CRC校验,上电
delay_ms(150);
CE = 1;
}
//
/**************************************************
*函数名: Check_ACK
*函数功能: 检查接收设备有无数据包,设定没有应答信号重发
*输入: 无
*输出: 无
/**************************************************/
uchar Check_ACK(bit clear)
{
while(IRQ);
sta = SPI_RW(NOP); // 返回状态寄存器
if(TX_DS)
{
//blink(3);
}
//blink(5);
if(MAX_RT)
if(clear) // 是否清除TX FIFO,没有清除在复位MAX_RT中断标志后重发
SPI_RW(FLUSH_TX);
SPI_RW_Reg(WRITE_REG + STATUS, sta); // 清除TX_DS或MAX_RT中断标志
IRQ = 1;
if(TX_DS)
return(0x00);
else
return(0xff);
}
相关文章:
基于单片机DHT11温湿度NRF2401无线通信控制系统
一、系统方案 本设计采用STC89C5单片机作为主控制器,从机采用DHT11传感器采集温湿度、按键设置报警阀值,液晶1602显示,蜂鸣器报警,无线NRF2401模块。 二、硬件设计 原理图如下: 三、单片机软件设计 1、首先是系统…...
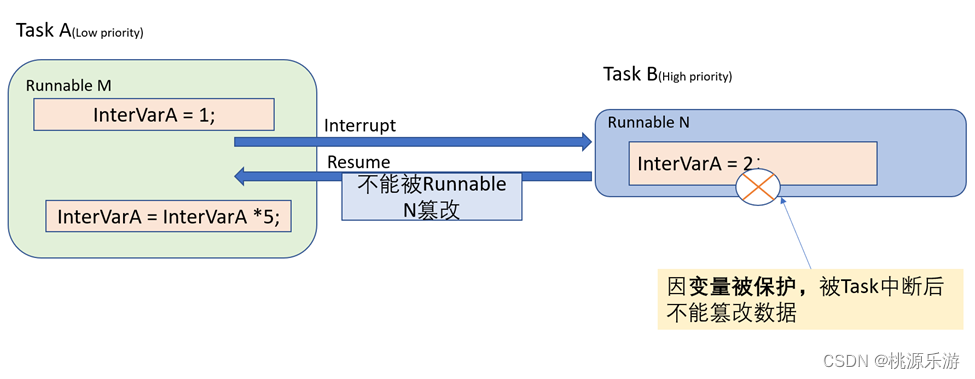
AutoSAR配置与实践(基础篇)2.5 RTE对数据一致性的管理
传送门 点击返回 ->AUTOSAR配置与实践总目录 AutoSAR配置与实践(基础篇)2.5 RTE对数据一致性的管理 一、 数据一致性问题引入二、 数据一致性的管理2.1 RTE管理 (SWC间)2.2 中断保护 (SWC内)2.3 变量保护IRVS (SWC内)2.4 Task分配2.5 任务抢占控制 一…...
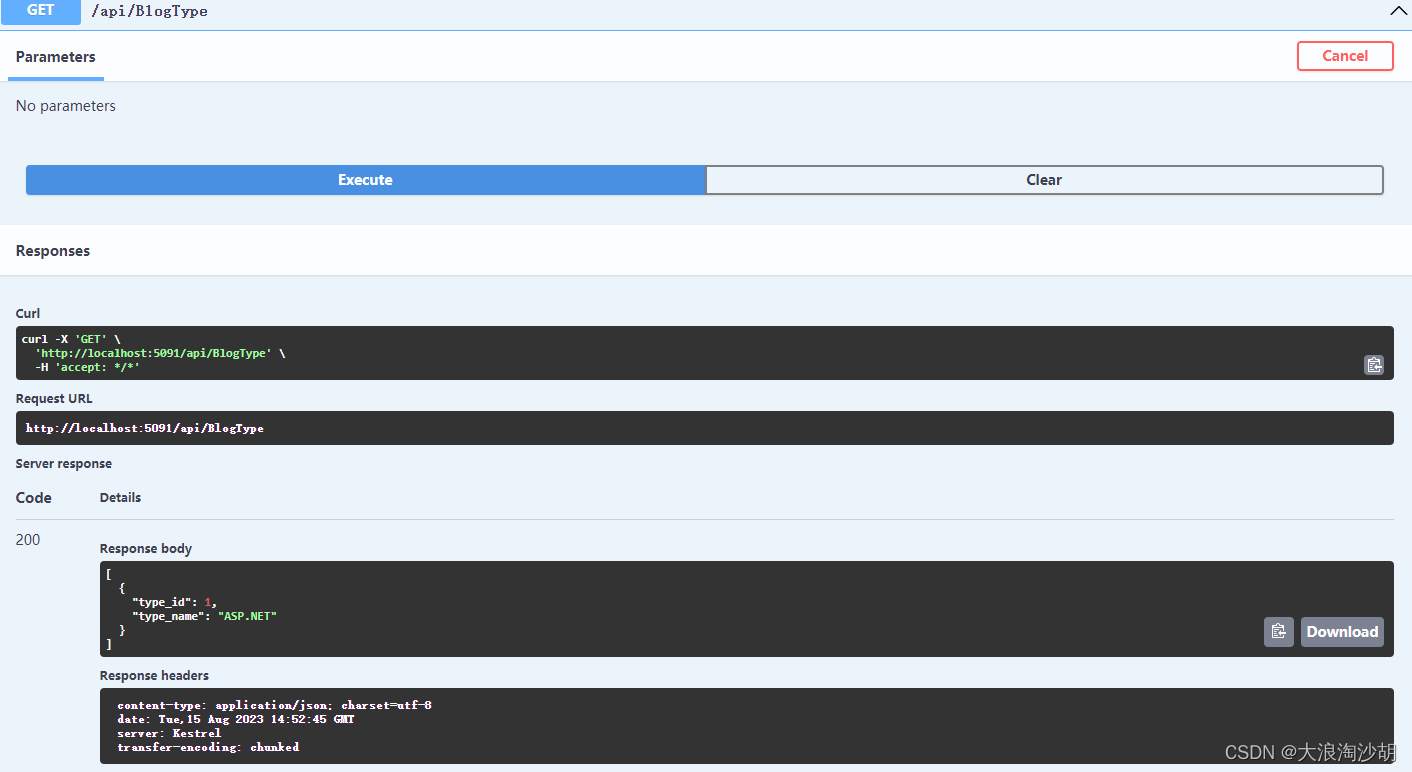
ASP.NET WEB API通过SugarSql连接MySQL数据库
注意:VS2022企业版可以,社区版可能存在问题。实体名称和字段和数据库中的要一致。 1、创建项目,安装SqlSugarCore、Pomelo.EntityFrameworkCore.MySql插件 2、文件结构 2、appsettings.json { “Logging”: { “LogLevel”: { “Default”: …...
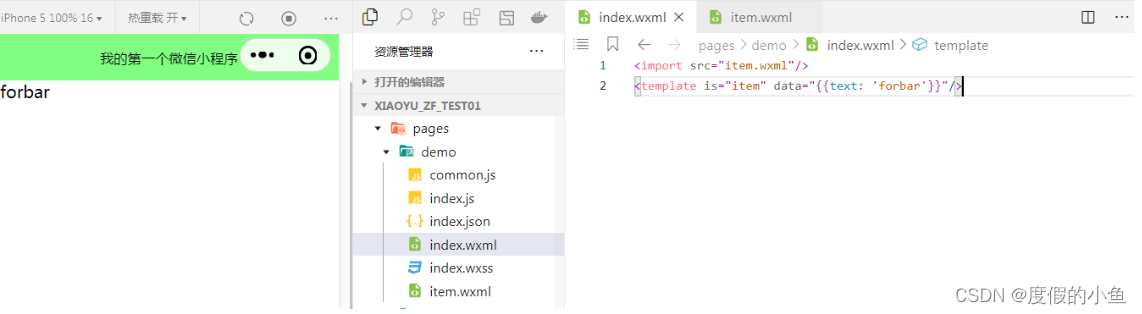
08-微信小程序视图层
08-微信小程序视图层 文章目录 视图层 ViewWXML数据绑定列表渲染条件渲染模板引用importimport 的作用域include WXSS尺寸单位样式导入内联样式选择器全局样式与局部样式 WXS注意事项页面渲染数据处理 视图层 View 框架的视图层由 WXML 与 WXSS 编写,由组件来进行…...

[机器学习]特征工程:特征降维
特征降维 1、简介 特征降维是指通过减少特征空间中的维度,将高维数据映射到一个低维子空间的过程。 在机器学习和数据分析中,特征降维可以帮助减少数据的复杂性、降低计算成本、提高模型性能和可解释性,以及解决维度灾难等问题。特征降维通…...
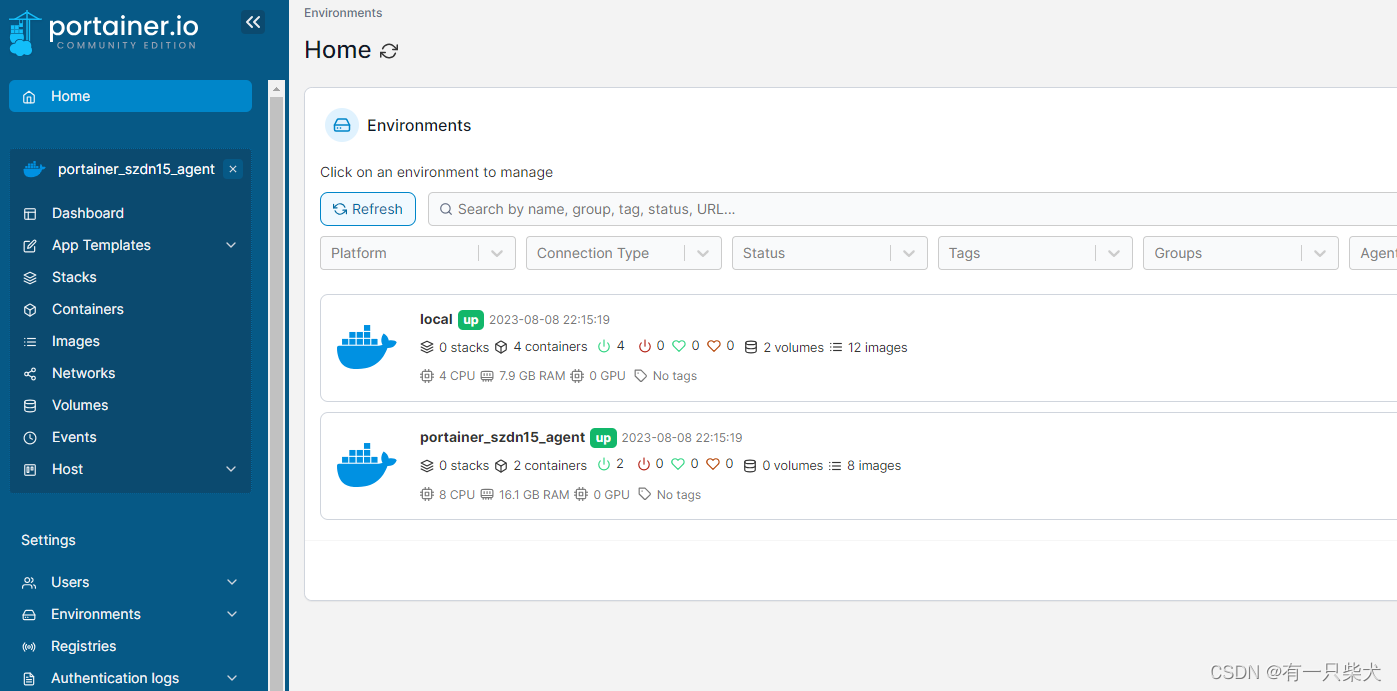
12. Docker可视化工具
目录 1、前言 2、Docker UI 2.1、部署Docker UI 2.2、管理容器 3、Portainer 3.1、部署Portainer 3.2、管理容器 3.3、添加远程Docker 4、Shipyard 1、前言 Docker 提供了命令行工具来管理 Docker 的镜像和运行 Docker 的容器。我们也可以使用图形工具来管理 Docker。…...

css层叠关系
文章目录 cascading声明冲突应用重置样式表a元素的类选择器顺序问题 cascading cascading – 层叠 解决声明冲突的过程,浏览器会自动处理;就是计算样式的权重,权重大的就被选择; 声明冲突 是指多个选择器选中同一个标签&#x…...

【Unity实战篇 】| 如何在小游戏中快速接入一个新手引导教程
前言 【Unity实战篇 】 | 如何在小游戏中快速接入一个新手引导教程一、简单教程描述二、接入Tutorial Master 实现游戏引导2.1 导入Tutorial Master2插件2.2 添加TutorialMasterManager脚本对象2.3 配置Tutorial,用于管理第一段引导内容2.4 配置Stage,用…...

Lookup Singularity
1. 引言 Lookup Singularity概念 由Barry WhiteHat在2022年11月在zkResearch论坛 Lookup Singularity中首次提出: 其主要目的是:让SNARK前端生成仅需做lookup的电路。Barry预测这样有很多好处,特别是对于可审计性 以及 形式化验证ÿ…...
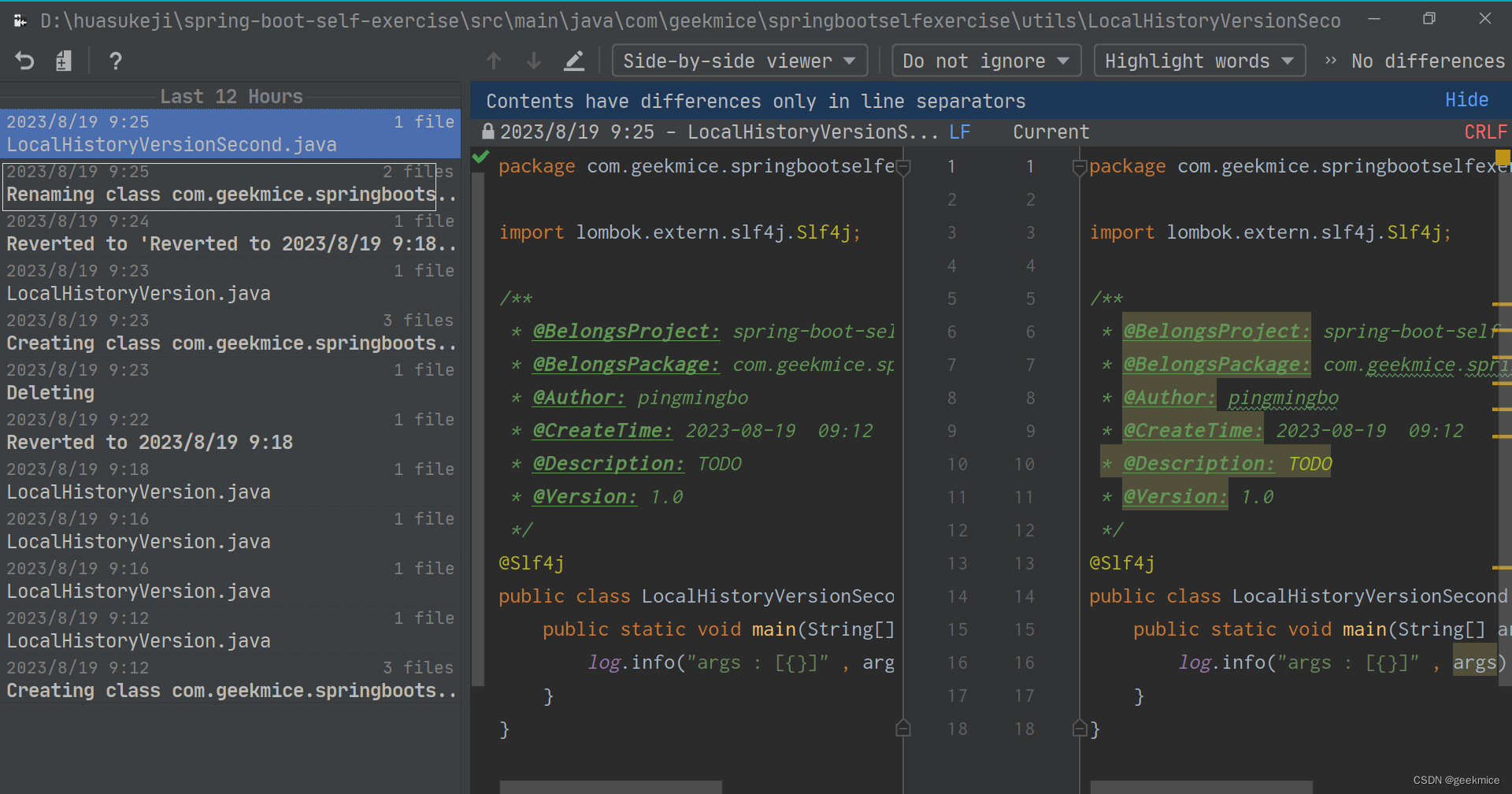
idea 本地版本控制 local history
idea 本地版本控制 local history 如何打开 1 自定义快捷键 settings->keymap->搜索框输入 show history -》Add Keyboard Shortcut -》设置为 CtrlAltL 2 右键文件-》local history -》show history 新建文件 版本1,creating class com.geekmice…这个是初…...
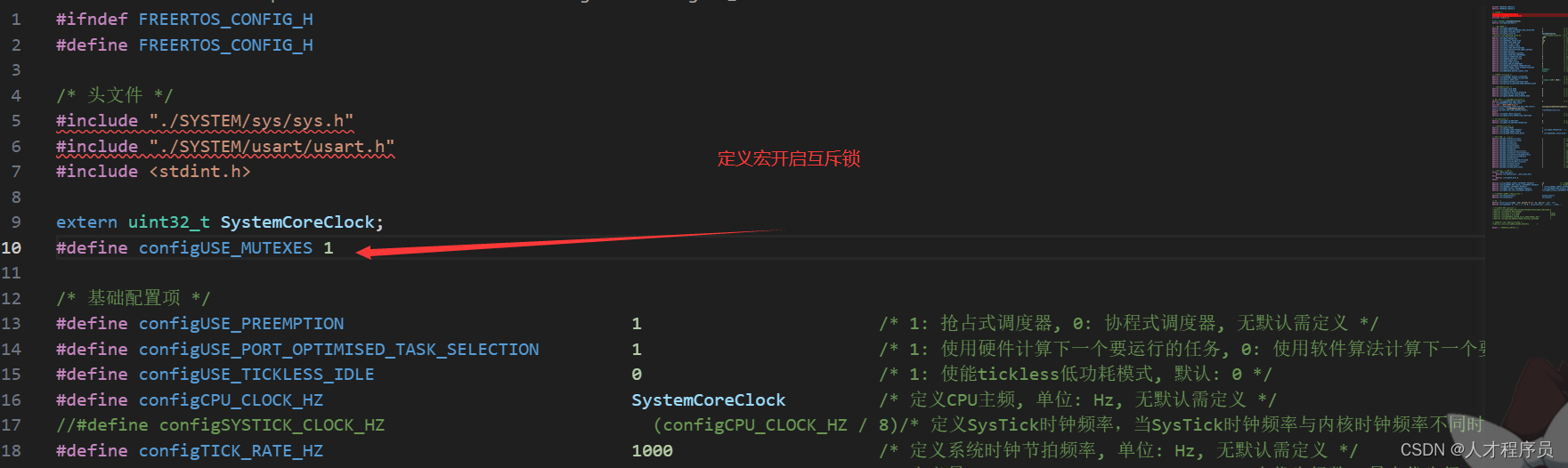
【Freertos基础入门】深入浅出freertos互斥量
文章目录 前言一、互斥量是什么?二、互斥量的使用场景三、互斥量的使用1.创建 2.删除互斥量3.give和take四、示例代码总结 前言 FreeRTOS是一款开源的实时操作系统,提供了许多基本的内核对象,其中包括互斥锁(Mutex)。…...
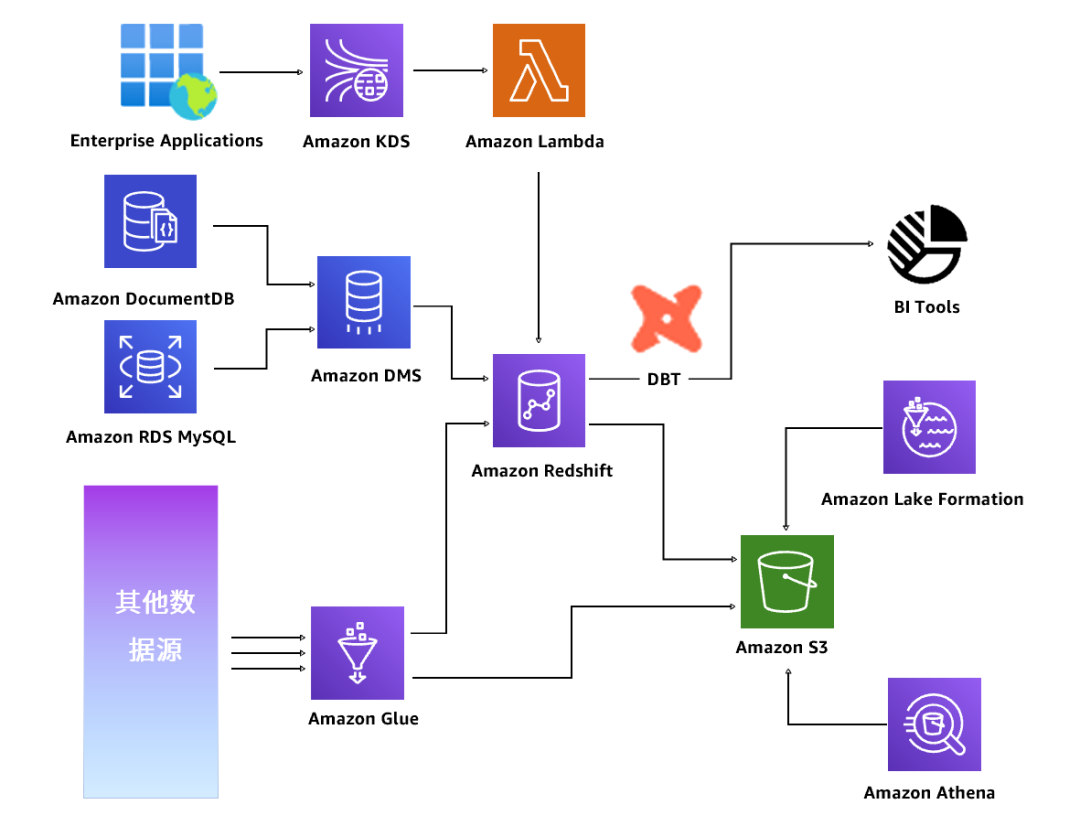
皮爷咖啡基于亚马逊云科技的数据架构,加速数据治理进程
皮爷咖啡(Peet’s Coffee)是美国精品咖啡品牌,于2017年进入中国,为中国消费者带来传统经典咖啡饮品,并特别呈现更加丰富的品质咖啡饮品体验。通过深入应用亚马逊云科技云原生数据库产品Amazon Redshift以及Amazon DMS等…...

C++ string类详解
⭐️ string string 是表示字符串的字符串类,该类的接口与常规容器的接口基本一致,还有一些额外的操作 string 的常规操作,在使用 string 类时,需要使用 #include <string> 以及 using namespace std;。 ✨ 帮助文档&…...

深入浅出Pytorch函数——torch.nn.init.ones_
分类目录:《深入浅出Pytorch函数》总目录 相关文章: 深入浅出Pytorch函数——torch.nn.init.calculate_gain 深入浅出Pytorch函数——torch.nn.init.uniform_ 深入浅出Pytorch函数——torch.nn.init.normal_ 深入浅出Pytorch函数——torch.nn.init.c…...

一、docker及mysql基本语法
文章目录 一、docker相关命令二、mysql相关命令 一、docker相关命令 (1)拉取镜像:docker pull <镜像ID/image> (2)查看当前docker中的镜像:docker images (3)删除镜像&#x…...
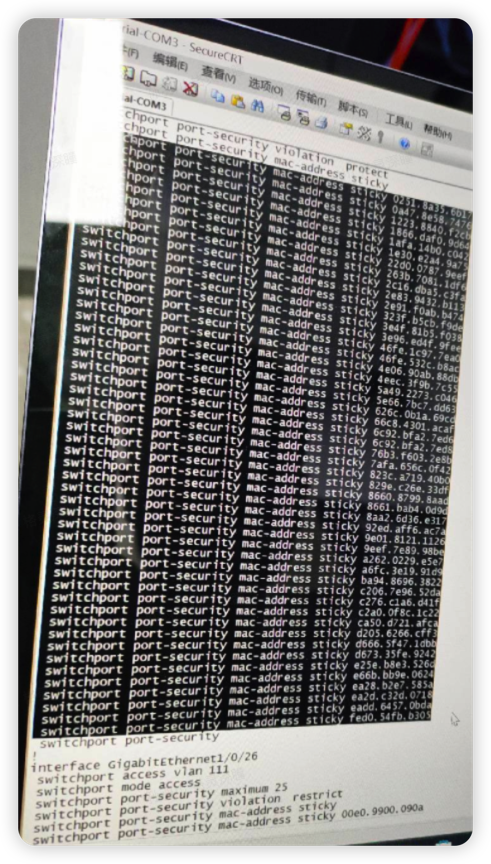
【计算机网络】13、ARP 包:广播自己的 mac 地址和 ip
机器启动时,会向外广播自己的 mac 地址和 ip 地址,这个即称为 arp 协议。范围是未经过路由器的部分,如下图的蓝色部分,范围内的设备都会在本地记录 mac 和 ip 的绑定信息,若有重复则覆盖更新(例如先收到 ma…...

通过微软Azure调用GPT的接口API-兼容平替OpenAI官方的注意事项
众所周知,我们是访问不通OpenAI官方服务的,但是我们可以自己通过代理或者使用第三方代理访问接口 现在新出台的规定禁止使用境外的AI大模型接口对境内客户使用,所以我们需要使用国内的大模型接口 国内的效果真的很差,现在如果想使…...

回归预测 | MATLAB实现BO-SVM贝叶斯优化支持向量机多输入单输出回归预测(多指标,多图)
回归预测 | MATLAB实现BO-SVM贝叶斯优化支持向量机多输入单输出回归预测(多指标,多图) 目录 回归预测 | MATLAB实现BO-SVM贝叶斯优化支持向量机多输入单输出回归预测(多指标,多图)效果一览基本介绍程序设计…...

GAN!生成对抗网络GAN全维度介绍与实战
目录 一、引言1.1 生成对抗网络简介1.2 应用领域概览1.3 GAN的重要性 二、理论基础2.1 生成对抗网络的工作原理2.1.1 生成器生成过程 2.1.2 判别器判别过程 2.1.3 训练过程训练代码示例 2.1.4 平衡与收敛 2.2 数学背景2.2.1 损失函数生成器损失判别器损失 2.2.2 优化方法优化代…...
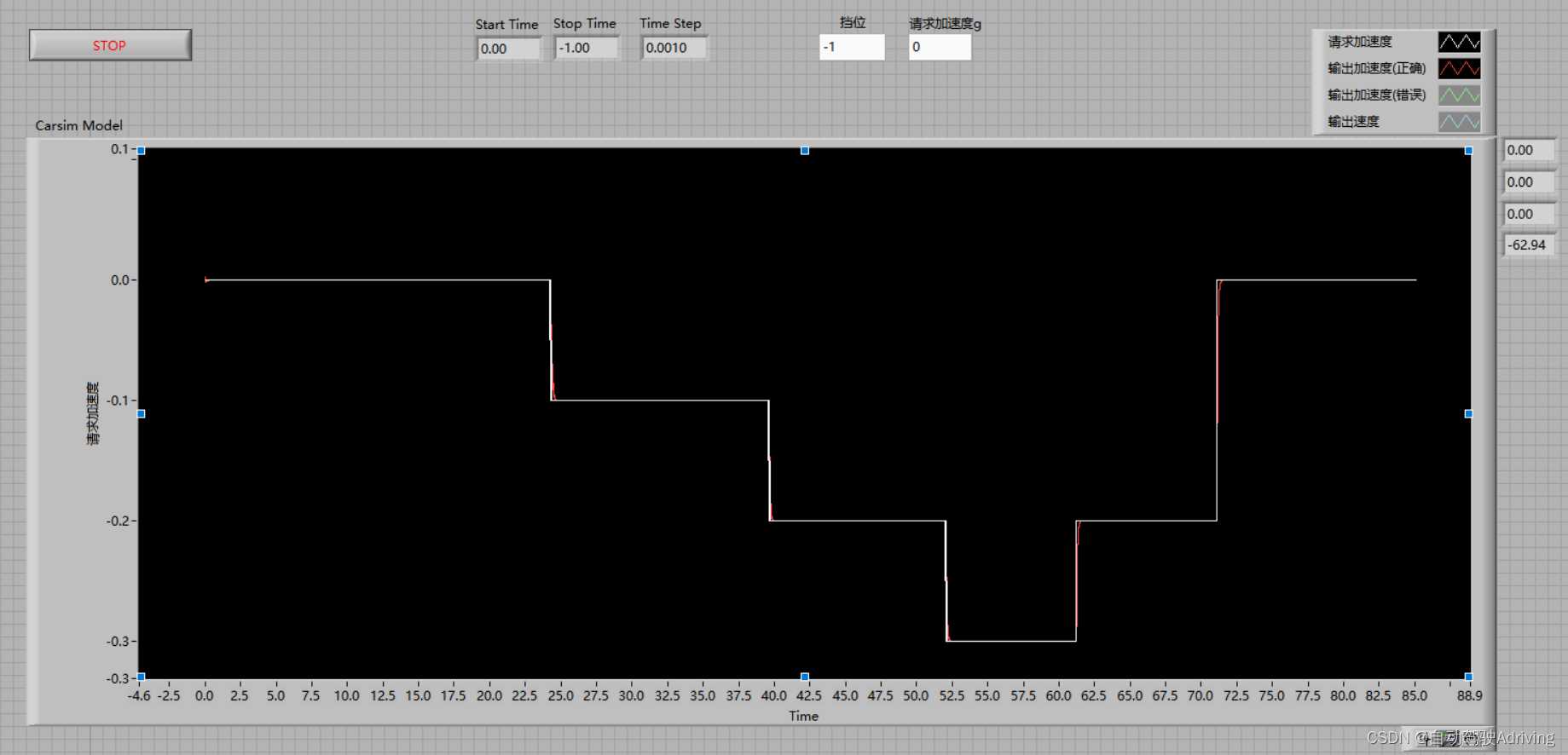
自动驾驶仿真:基于Carsim开发的加速度请求模型
文章目录 前言一、加速度输出变量问题澄清二、配置Carsim动力学模型三、配置Carsim驾驶员模型四、添加VS Command代码五、Run Control联合仿真六、加速度模型效果验证 前言 1、自动驾驶行业中,算法端对于纵向控制的功能预留接口基本都是加速度,我们需要…...

039对称二叉树
对称二叉树 题目链接:https://leetcode.cn/problems/symmetric-tree/description/?envTypestudy-plan-v2&envIdtop-100-liked 我的解答: //方法一:递归 //时间复杂度:O(n) //空间复杂度:O(n) public boolean isSy…...

CircuitPython开发板选型指南:从需求到Adafruit产品实战解析
1. 项目概述:为什么选择CircuitPython开发板是个技术活如果你刚开始接触硬件编程,或者是从Arduino转向更友好的开发环境,那么CircuitPython绝对是一个让人眼前一亮的选项。它把Python的简洁语法带到了微控制器上,让你能用几行代码…...

声明式应用编排框架Planifest:云原生时代应用交付新范式
1. 项目概述:一个面向未来的声明式应用编排框架如果你和我一样,在云原生和自动化运维领域摸爬滚打了几年,就会深刻体会到“编排”这个词的分量。从早期的Shell脚本,到Ansible、Terraform,再到Kubernetes的YAML海洋&…...

Python 的串口操作库 pyserial
封装了串口通讯模块,支持Linux、Windows、BSD(可能支持所有支持POSIX的操作系统),支持 Jython (Java) 和 IconPython (.NET and Mono)。 首页 http://pyserial.sf.net/ 1. 特性 所有平台使用同样的类接口端口号默认从0开始&…...

Claude模型配置管理工具:从原理到实践,构建高效AI应用
1. 项目概述:一个为Claude模型量身定制的配置管理工具最近在折腾大语言模型本地部署和API调用时,我发现一个挺普遍的问题:虽然像Claude这样的模型能力很强,但每次想切换不同的使用场景——比如从写代码切换到写文案,或…...

开源音频标注工具audamo:从部署到实战的全流程指南
1. 项目概述:一个为音频数据标注而生的开源工具如果你正在处理语音识别、音频事件检测或者任何需要大量标注音频数据的项目,那么“标注”这个环节大概率是你工作流中最耗时、也最令人头疼的部分。手动用Audacity一帧一帧地听、标记,效率低下不…...

Go语言实现轻量级双向文件同步工具clawsync配置与实战
1. 项目概述:一个轻量级的文件同步利器在数据备份、多设备协同或者项目部署的场景里,文件同步是个绕不开的活儿。你可能用过rsync,功能强大但命令参数复杂;也可能试过syncthing,全平台覆盖但需要常驻后台服务。如果你在…...

龙虾热降温,我们到底需要什么样的 Agent?
责编 | 《AI 进化论》栏目组出品 | CSDN(ID:CSDNnews)过去几个月,AI Agent 无疑是技术圈最火热的词。我们聊颠覆、聊入口、聊取代……仿佛一夜之间,一个无所不能的“数字员工”就能接管我们的一切工作。热度之下&#…...

Vivado工程实战:在ZCU102上配置MIG控制器时,SLEW属性设置成SLOW还是FAST?
Vivado工程实战:ZCU102平台MIG控制器SLEW属性深度解析 在Xilinx ZCU102开发板上进行DDR4接口设计时,MIG控制器的配置往往成为项目成败的关键。许多工程师能够顺利完成基础配置,却在面对诸如SLEW属性这类"细微"参数时陷入选择困境。…...

AMD Ryzen终极调试指南:7步解锁SMUDebugTool硬件级控制
AMD Ryzen终极调试指南:7步解锁SMUDebugTool硬件级控制 【免费下载链接】SMUDebugTool A dedicated tool to help write/read various parameters of Ryzen-based systems, such as manual overclock, SMU, PCI, CPUID, MSR and Power Table. 项目地址: https://g…...