学习笔记:用ROS接收rosbag发布的topic
用ROS接收 bag.open发布的topic
python语言
要使用ROS接收保存在rosbag文件中的话题消息,可以按照以下步骤进行操作:
1.首先,请确保你已经安装了ROS和相关的依赖。
2.创建一个ROS功能包(或使用现有的功能包)来处理接收rosbag的话题消息。使用catkin_create_pkg命令可以创建新的功能包:
$ catkin_create_pkg my_bag_subscriber rospy roscpp
3.在功能包的src目录下创建一个Python脚本,用于接收rosbag发布的话题消息。
4.引入需要的ROS和Python库,在脚本的开头添加以下代码:
#!/usr/bin/env pythonimport rospy
import rosbag
from std_msgs.msg import AnyMsgType # 替换为你要接收的消息类型
5.创建一个回调函数来处理接收到的话题消息。回调函数的参数是接收到的消息对象。
def callback(msg):# 处理接收到的消息# 在这里可以将消息打印出来或者进行其他操作print(msg)
6.在主函数中打开rosbag文件,并创建一个订阅器来接收话题消息。在循环中读取rosbag文件,将消息传递给回调函数进行处理。
if __name__ == '__main__':rospy.init_node('bag_subscriber')# 读取rosbag文件bag = rosbag.Bag('/path/to/your/rosbag/bagfile.bag')# 创建订阅器rospy.Subscriber('/your_topic', AnyMsgType, callback) # 替换为适当的话题和消息类型# 循环读取并处理rosbag文件中的消息for topic, msg, t in bag.read_messages():callback(msg)# 关闭rosbag文件bag.close()rospy.spin()
请注意替换代码中的以下内容:
my_bag_subscriber:你的功能包名称。AnyMsgType:你要接收的消息类型。/path/to/your/rosbag/bagfile.bag:rosbag文件的路径。/your_topic:你要接收的话题名称。
7.保存脚本,然后编译你的ROS功能包,并运行接收rosbag的脚本:
$ cd ~/catkin_ws
$ catkin_make
$ source devel/setup.bash
$ rosrun my_bag_subscriber bag_subscriber.py
这样,你的ROS节点就可以接收并处理rosbag文件中发布的话题消息了。注意,你需要根据实际情况更改代码中的参数,以匹配你的rosbag文件和要接收的话题消息类型。
C++语言
以下是使用C++重写上述Python代码的步骤:
1.在你的ROS工作空间中创建一个新的功能包(如果尚未创建):
$ cd ~/catkin_ws/src
$ catkin_create_pkg my_bag_subscriber roscpp rospy std_msgs
2.在功能包的src目录下创建一个新的C++源文件,例如bag_subscriber.cpp。
3.打开bag_subscriber.cpp文件,并添加必要的头文件和命名空间:
#include <ros/ros.h>
#include <rosbag/bag.h>
#include <std_msgs/AnyMsgType.h> // 替换为你要接收的消息类型// 回调函数,处理接收到的消息
void callback(const std_msgs::AnyMsgType::ConstPtr& msg)
{// 处理接收到的消息// 在这里可以将消息打印出来或者进行其他操作ROS_INFO_STREAM(*msg);
}
4.添加主函数,其中打开rosbag文件并创建订阅器:
int main(int argc, char** argv)
{ros::init(argc, argv, "bag_subscriber");ros::NodeHandle nh;// 读取rosbag文件rosbag::Bag bag;bag.open("/path/to/your/rosbag/bagfile.bag", rosbag::bagmode::Read);// 创建订阅器ros::Subscriber sub = nh.subscribe<std_msgs::AnyMsgType>("/your_topic", 10, callback); // 替换为适当的话题和消息类型// 循环读取并处理rosbag文件中的消息rosbag::View view(bag);for(const rosbag::MessageInstance& msg : view){std_msgs::AnyMsgType::ConstPtr typed_msg = msg.instantiate<std_msgs::AnyMsgType>();if(typed_msg != nullptr){callback(typed_msg);}}// 关闭rosbag文件bag.close();ros::spin();return 0;
}
请注意替换代码中的以下内容:
my_bag_subscriber:你的功能包名称。AnyMsgType:你要接收的消息类型。/path/to/your/rosbag/bagfile.bag:rosbag文件的路径。/your_topic:你要接收的话题名称。
5.在功能包的根目录中创建一个CMakeLists.txt文件,并添加适当的编译指令。以下是一个示例CMakeLists.txt文件:
cmake_minimum_required(VERSION 2.8.3)
project(my_bag_subscriber)find_package(catkin REQUIRED COMPONENTSroscpprospystd_msgs
)catkin_package()include_directories(${catkin_INCLUDE_DIRS}
)add_executable(bag_subscriber src/bag_subscriber.cpp)
target_link_libraries(bag_subscriber ${catkin_LIBRARIES})
6.编译你的ROS功能包:
$ cd ~/catkin_ws
$ catkin_make
7.运行接收rosbag的可执行文件:
$ source devel/setup.sh
$ rosrun my_bag_subscriber bag_subscriber
这样,你的ROS节点就可以使用C++接收并处理rosbag文件中发布的话题消息了。请根据实际情况修改代码中的参数,以匹配你的rosbag文件和要接收的话题消息类型。
用ROS接收rosbag play播放的topic
要接收rosbag播放的话题消息,你可以在另一边编写一个ROS节点来订阅相应的话题。下面是一个示例代码:
-
首先,请确保你已经安装了ROS和相关的依赖。
-
创建一个ROS功能包(或使用现有的功能包)来处理接收rosbag播放的话题消息。使用
catkin_create_pkg命令可以创建新的功能包:
$ catkin_create_pkg my_bag_player rospy roscpp
- 在功能包的
src目录下创建一个Python或C++脚本,用于接收话题消息。
对于Python脚本(bag_receiver.py):
#!/usr/bin/env pythonimport rospy
from std_msgs.msg import AnyMsgType # 替换为你要接收的消息类型def callback(msg):# 处理接收到的消息# 在这里可以将消息打印出来或进行其他操作rospy.loginfo(msg)if __name__ == '__main__':rospy.init_node('
[Something went wrong, please try again later.]....
C++
要使用C++编程接收rosbag播放的话题消息,可以按照以下步骤进行操作:
1.在你的ROS工作空间中创建一个新的功能包(如果尚未创建):
$ cd ~/catkin_ws/src
$ catkin_create_pkg my_bag_listener roscpp std_msgs
2.在功能包的src目录下创建一个新的C++源文件,例如bag_listener.cpp。
3.打开bag_listener.cpp文件,并添加必要的头文件和命名空间:
#include <ros/ros.h>
#include <std_msgs/AnyMsgType.h> // 替换为你要接收的消息类型// 回调函数,处理接收到的消息
void callback(const std_msgs::AnyMsgType::ConstPtr& msg)
{// 处理接收到的消息// 在这里可以将消息打印出来或者进行其他操作ROS_INFO_STREAM(*msg);
}
4.添加主函数,创建订阅器并订阅话题:
int main(int argc, char** argv)
{ros::init(argc, argv, "bag_listener");ros::NodeHandle nh;// 创建订阅器ros::Subscriber sub = nh.subscribe<std_msgs::AnyMsgType>("/your_topic", 10, callback); // 替换为适当的话题和消息类型ros::spin();return 0;
}
请注意替换代码中的以下内容:
my_bag_listener:你的功能包名称。AnyMsgType:你要接收的消息类型。/your_topic:你要接收的话题名称。
5.在功能包的根目录中创建一个CMakeLists.txt文件,并添加适当的编译指令。以下是一个示例CMakeLists.txt文件:
cmake_minimum_required(VERSION 2.8.3)
project(my_bag_listener)find_package(catkin REQUIRED COMPONENTSroscppstd_msgs
)catkin_package()include_directories(${catkin_INCLUDE_DIRS}
)add_executable(bag_listener src/bag_listener.cpp)
target_link_libraries(bag_listener ${catkin_LIBRARIES})
6.编译你的ROS功能包:
$ cd ~/catkin_ws
$ catkin_make
7.使用rosbag play命令播放rosbag文件,同时运行可执行文件来接收并处理播放的话题消息:
打开一个终端窗口,执行以下命令播放rosbag文件:
$ source devel/setup.sh
$ rosbag play /path/to/your/rosbag/bagfile.bag
然后在另一个终端窗口中运行接收话题消息的可执行文件:
$ source devel/setup.sh
$ rosrun my_bag_listener bag_listener
这样,你的ROS节点就可以使用C++接收并处理rosbag播放的话题消息了。请根据实际情况修改代码中的参数,以匹配你要接收的话题和消息类型。确保已经安装了与消息类型对应的依赖项,并在代码中进行适当的更改。
相关文章:

学习笔记:用ROS接收rosbag发布的topic
用ROS接收 bag.open发布的topic python语言 要使用ROS接收保存在rosbag文件中的话题消息,可以按照以下步骤进行操作: 1.首先,请确保你已经安装了ROS和相关的依赖。 2.创建一个ROS功能包(或使用现有的功能包)来处理…...
LAMP架构介绍配置命令讲解
LAMP架构介绍配置命令讲解 一、LAMP架构介绍1.1概述1.2LAMP各组件的主要作用1.3各组件的安装顺序 二、编译安装Apache httpd服务---命令讲解1、关闭防火墙,将安装Apache所需的软件包传到/opt/目录下2、安装环境依赖包3、配置软件模块4、编译安装5、优化配置文件路径…...
C语言之函数题
目录 1.乘法口诀表 2.交换两个整数 3.函数判断闰年 4.函数判断素数 5.计算斐波那契数 6.递归实现n的k次方 7.计算一个数的每位之和(递归) 8.字符串逆序(递归实现) 9.strlen的模拟(递归实现) 10.求…...
SpringBoot的四种handler类型
Controller ReuestMapping 实现Controller接口 使用Component将该类封装成一个Bean 实现HttpRequestHandler 实现RouterFunction...
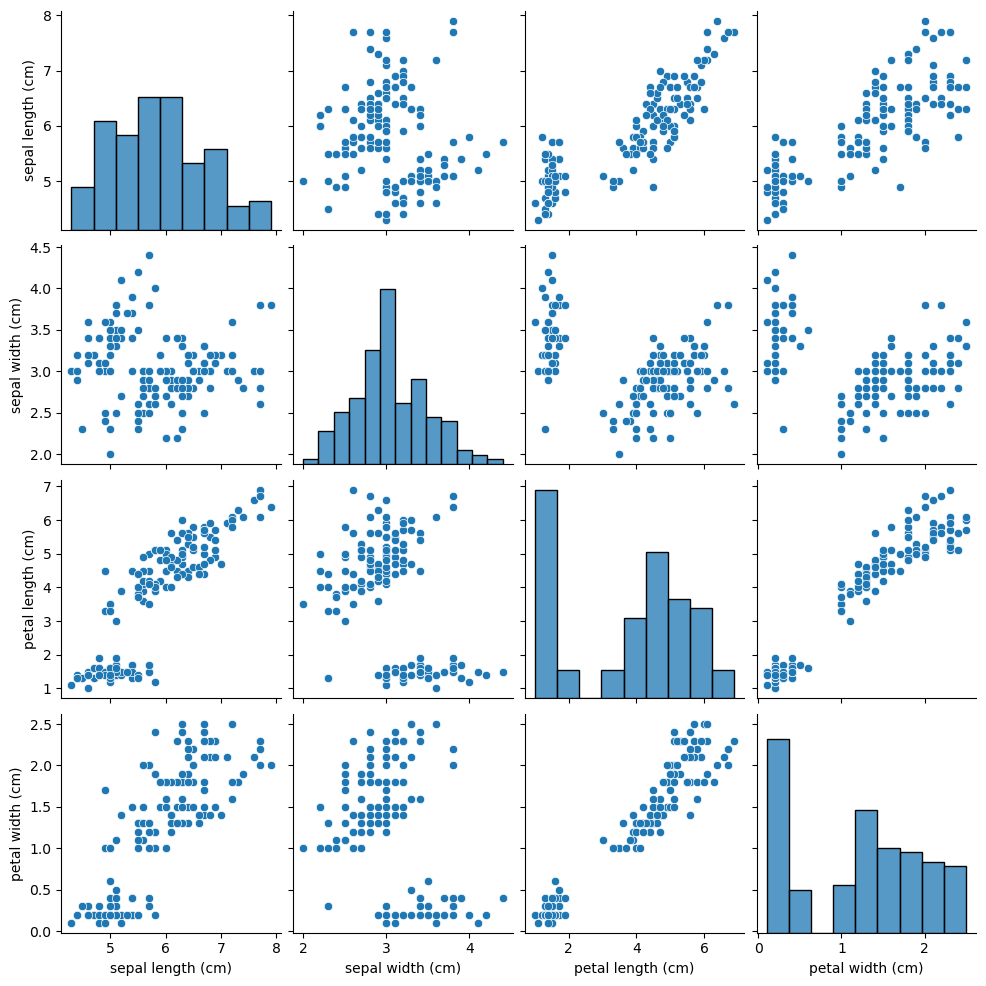
基于KNN算法的鸢尾花种类预测
导入数据 iris_data load_iris() iris_data.data[0:5, :]array([[5.1, 3.5, 1.4, 0.2],[4.9, 3. , 1.4, 0.2],[4.7, 3.2, 1.3, 0.2],[4.6, 3.1, 1.5, 0.2],[5. , 3.6, 1.4, 0.2]])# 特征值名称 iris_data.feature_names[sepal length (cm),sepal width (cm),petal length (cm…...

英语-面试
自我介绍 hi,my name is tzh,26 years old.I major in software engineering. I participate in the design and development of the social project and e-commerce project. I master java and algorithm. Im familiar with gateway,spring,springboot,springcloud,redis…...
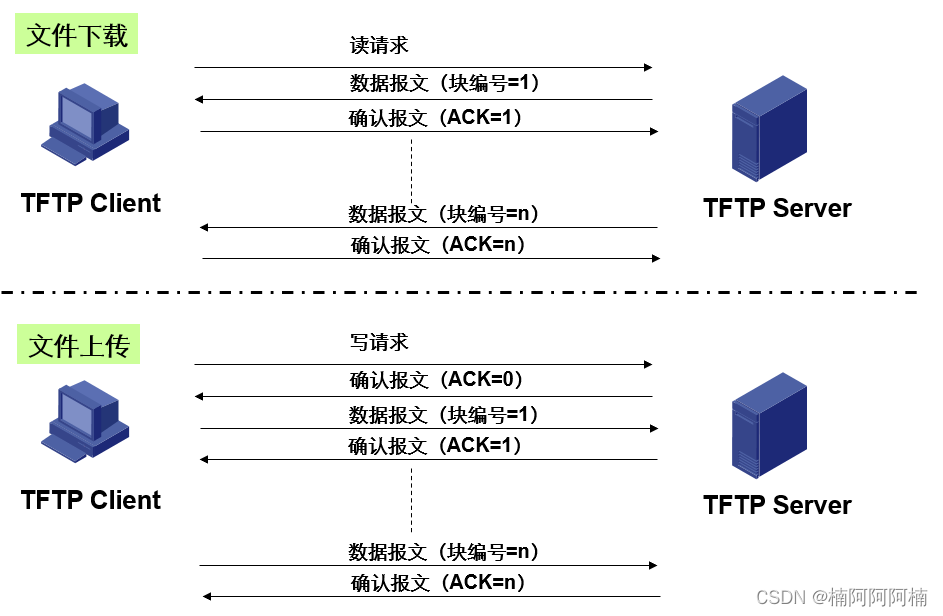
文件传输协议
文章目录 一、FTP1. 定义2. 端口3. 数据传输方式主动方式被动方式 二、TFTP三、常用命令 首先可以看下思维导图,以便更好的理解接下来的内容。 一、FTP 1. 定义 文件传输协议(FTP)是一种用于在客户端和服务器之间进行文件传输的标准网络协…...

Llama-2大模型本地部署研究与应用测试
最近在研究自然语言处理过程中,正好接触到大模型,特别是在年初chatgpt引来的一大波AIGC热潮以来,一直都想着如何利用大模型帮助企业的各项业务工作,比如智能检索、方案设计、智能推荐、智能客服、代码设计等等,总得感觉…...
白嫖idea
白嫖idea 地址 https://www.jetbrains.com/toolbox-app/...
PyCharm切换虚拟环境
PyCharm切换虚拟环境 为了满足不同任务需要不同版本的包,可以在Anaconda或者Miniconda创建多个虚拟环境文件夹,并在PyCharm下切换虚拟环境。 解决方案 1、打开Ananconda Prompt 2、创建自己的虚拟环境 格式:conda create -n 虚拟环境名字…...
自动化运维工具-----Ansible入门详解
目录 一.Ansible简介 什么是Ansible? Ansible的特点 Ansible的架构 二.Ansible任务执行解析 ansible任务执行模式 ansible执行流程 ansible命令执行过程 三.Ansible配置解析 ansible的安装方式 ansible的程序结构(yum安装为例) ansibl…...
一、Mycat2介绍与下载安装
第一章 入门概述 1.1 是什么 Mycat 是数据库中间件。 1、数据库中间件 中间件:是一类连接软件组件和应用的计算机软件,以便于软件各部件之间的沟 通。 例子:Tomcat,web中间件。 数据库中间件:连接java应用程序和数据库…...

链表的介绍
链表是一种常用的数据结构,它可以动态地添加、删除、查找和遍历元素。链表由多个节点组成,每个节点包括一个数据项和一个指向下一个节点的指针。这种数据结构可以高效地插入和删除元素,但相对于数组来说,查找元素的效率较低。 插…...
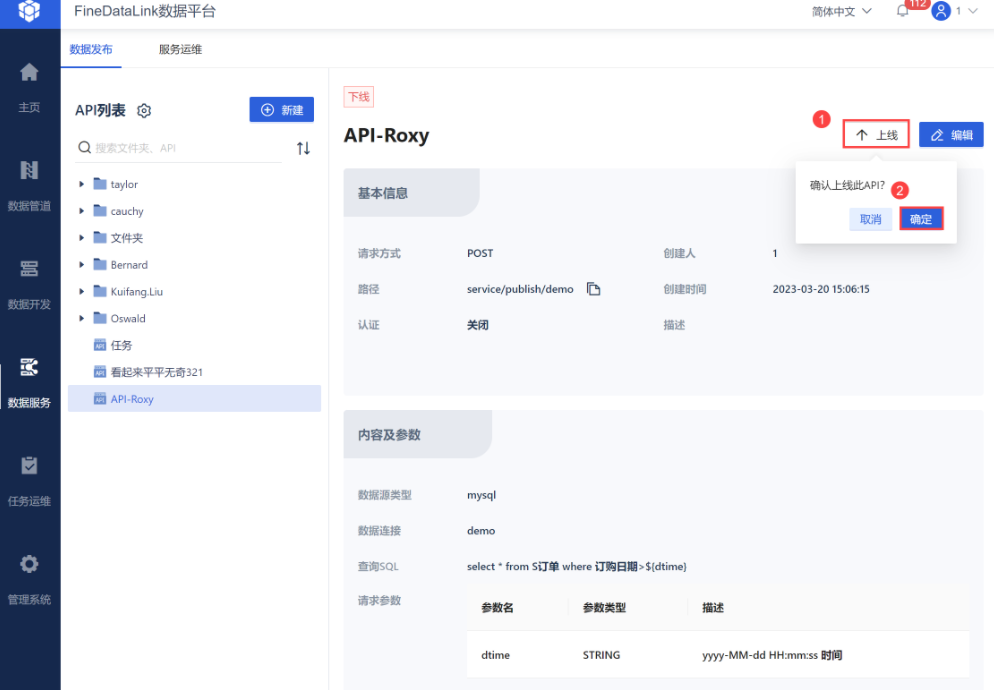
深度剖析:数据服务API的安全性与隐私保护
随着互联网技术的飞速发展,数据服务API已经成为了企业和个人获取、处理和分析数据的重要工具。然而,数据服务API的安全问题也日益凸显,尤其是在用户隐私保护方面。本文将深入剖析数据服务API的安全性与隐私保护问题,并结合产品FDL…...
MediaPlayer音频与视频的播放介绍
作者:向阳逐梦 Android多媒体中的——MediaPlayer,我们可以通过这个API来播放音频和视频该类是Androd多媒体框架中的一个重要组件,通过该类,我们可以以最小的步骤来获取,解码和播放音视频。 它支持三种不同的媒体来源…...
【Terraform学习】Terraform模块基础操作(Terraform模块)
本站以分享各种运维经验和运维所需要的技能为主 《python》:python零基础入门学习 《shell》:shell学习 《terraform》持续更新中:terraform_Aws学习零基础入门到最佳实战 《k8》暂未更新 《docker学习》暂未更新 《ceph学习》ceph日常问题解…...
)
改进的KMeans 点云聚类算法 根据体元中的点数量计算点密度,并获取前K个点密度最大的体元作为初始聚类中心(附 matlab 代码)
KMeans函数的主要逻辑如下: 使用InitCenter函数初始化聚类中心,该函数根据体元密度选择初始聚类中心。该函数的输入参数包括数据(data)、聚类中心数量(centerNum)和体元数量(voxelNum)。根据点云的取值范围计算包围盒的体积(V)和体元边长(d)。根据体元边长将点云数…...

php user.ini详解
0x00 前言 本篇主要是讲解分析一下user.ini相关的内容。因为这个知识点涉及到文件上传的绕过 0x01 正文 .user.ini 文件是PHP的配置文件,用于自定义PHP的配置选项。该文件通常位于PHP安装目录的根目录下,或者在特定的网站目录下。 .user.ini 文件是一…...

用 PHP 和 JavaScript 显示地球卫星照片
向日葵 8 号气象卫星是日本宇宙航空研究开发机构设计制造的向日葵系列卫星之一,重约 3500 公斤,设计寿命 15 年以上。该卫星于 2014 年 10 月 7 日由 H2A 火箭搭载发射成功,主要用于监测暴雨云团、台风动向以及持续喷发活动的火山等防灾领域。…...

Ubantu安装mongodb,开启远程访问和认证
最近因为项目原因需要在阿里云服务器上部署MongoDB,操作系统为Ubuntu,网上查阅了一些资料,特此记录一下步骤。 1.运行apt-get install mongodb命令安装MongoDB服务(如果提示找不到该package,说明apt-get的资源库版本比…...

Android BroadcastReceiver 深度解析:原理、实践与面试指南
引言 在 Android 开发中,BroadcastReceiver 是一个核心组件,用于处理系统级事件或应用内通信。它允许应用程序响应来自系统或其他应用的广播消息,如设备开机、网络状态变化或自定义事件。BroadcastReceiver 基于事件驱动的模型,帮助开发者实现松耦合的架构,提升应用的响应…...

华为、华三、思科、锐捷网络设备远程登录配置
目录 一、华为Stelnet登录配置 二、华三Stelent登录配置 三、思科SSH登录配置 四、锐捷SSH登录配置 一、华为Stelnet登录配置 #查看SSH状态# [Server]dis ssh server status SSH Version : 2.0 SSH authentication timeout (Seconds) : 60 SSH authentication retries …...

[具身智能-824]:人的大脑,如何实现高实时、多模态联合、发现表象背后的各种规律和层层叠叠的不同层次的语义的?
人脑实现:高实时响应 多模态融合 深挖底层规律 多层级语义解析 完整原理一、先总述核心机制人脑不是串行流水线,是并行分布式神经集群架构依靠分层神经通路 并行同步处理 经验记忆锚定 潜意识预推理,天然完成:毫秒级高实时、…...

基于PSoC 6与BMI160构建嵌入式IMU测试系统:从驱动到上位机全流程
1. 项目概述:从一颗传感器到一个完整的测试系统最近在做一个嵌入式项目,需要用到一款高性能的惯性测量单元(IMU)——博世的BMI160。这颗芯片在消费电子和物联网领域很常见,三轴加速度计加三轴陀螺仪,精度和…...

TVBOX最新电视直播软件tv版下载与安装教程
如何安装最新版电视直播软件tv版TVBOX?先讲清楚:TVBox 是开源播放器,本身不带影视资源,装好后必须配置 “数据源 / 接口” 才能用。下面分「下载 → 安装 → 配置 → 常见问题」一步步来。(如果不会配置,可…...

Agent 与 Chat 的区别及常见工具详解
1. 引言 在人工智能和大语言模型(LLM)快速发展的今天,我们经常听到“Chat”(聊天机器人)和“Agent”(智能体)这两个概念。虽然它们都基于大模型与用户进行交互,但在设计理念、能力边…...

当流程图XML“损坏”时:手把手教你用Activiti API解析与修复BPMN文件
当BPMN文件遭遇“数据灾难”:Activiti深度修复实战指南 凌晨三点,服务器警报突然响起——核心业务流程引擎拒绝加载最新上传的BPMN文件。这不是简单的格式错误,而是一个从老旧系统迁移来的、经过多次手工编辑的流程定义文件。作为技术负责人&…...

数科OFD阅读历史清理全攻略:统信UOS/麒麟KYLINOS下图形界面与命令行两种方法实测
数科OFD阅读历史清理全攻略:统信UOS/麒麟KYLINOS下图形界面与命令行两种方法实测 在国产化办公环境中,数科OFD作为主流的版式文档阅读工具,其使用痕迹管理常被忽视却至关重要。无论是个人用户希望保护阅读隐私,还是企业IT管理员需…...

嵌入式PID温度控制:从算法原理到C语言工程实现
1. 项目概述与核心思路最近在做一个智能热水器的嵌入式控制项目,核心任务就是让水温能又快又稳地达到我们设定的目标值。这听起来简单,但实际做起来,水温系统有惯性、有延迟,加热功率和环境散热也在实时变化,想实现精准…...

别再让用户错过消息!UniApp应用通知权限引导的最佳实践与UniPush 2.0优化
UniApp应用通知权限引导的艺术与UniPush 2.0实战策略 当用户的手指在屏幕上轻轻滑动,决定是否授予你的应用通知权限时,这场无声的对话将直接影响后续的用户留存与活跃度。数据显示,超过60%的用户在首次拒绝通知权限后,永远不会主动…...