使用Sumo以及traci实现交叉口信号灯自适应控制
使用Sumo以及traci实现交叉口信号灯自适应控制
文章目录
- 使用Sumo以及traci实现交叉口信号灯自适应控制
- 使用Sumo以及traci实现交叉口信号灯感应控制
- 一、什么是交叉口感应控制
- 二、Traci中的感应控制实现流程
- 1.感应控制逻辑
- 2.仿真过程
使用Sumo以及traci实现交叉口信号灯感应控制
Sumo作为比较常用的交通仿真软件,常用于各范围的路网仿真。今天研究一下怎么通过Python和Traci结合,实现交叉口信号灯自适应控制。
一、什么是交叉口感应控制
交通信号控制方式是应用于道路交通信号控制系统,为控制和调整交通流运行状态,按照交通信号控制方案所执行的特定控制方式。国标《道路交通信号控制系统术语》(GB/T 31418-2015)、行标《《道路交通信号控制方式 第1部分:通用技术条件》(GA/T 527.1-2015)、美国《Signal Timing Mannual》对感应控制(actuated)和自适应控制(adaptive)都做了相关定义和描述。标准中对“感应控制”的描述为道路交通信号控制机根据检测器测得的交通流信息来调节信号显示时间的控制方式。
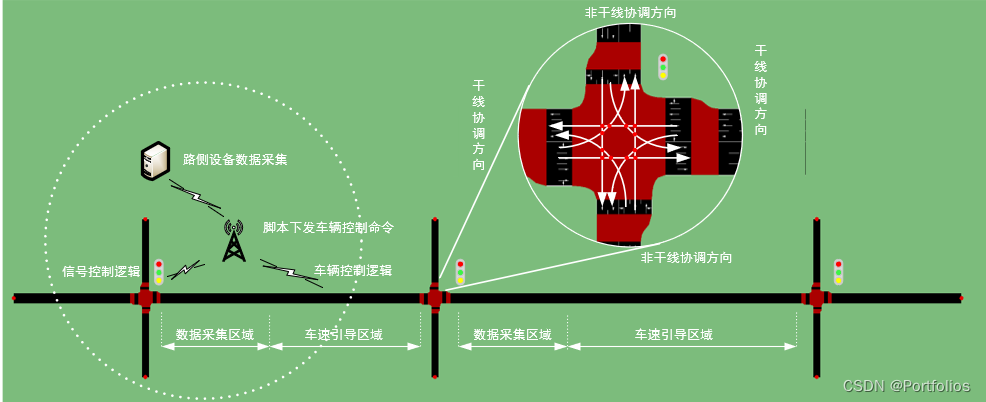
以行业标准《道路交通信号控制方式 第1部分:通用技术条件》(GA/T 527.1-2015)种描述的“单点感应控制”:根据交通流检测器测定到达交叉口进口道的交通需求,对预先设定的交通信号控制方案进行执行相位的信号配时优化调整,也可选择执行预设相位、优化相序,以减少停车延误、排队长度为目标。
根据检测器布设方式,可以将感应控制分为半感应控制和全感应控制。半感应控制只在部分进口道上设置检测器,这种情况下交叉口仅部分相位有感应请求。而全感应控制在所有进口道上都设置检测器,这种情况下交叉口所有相位均有感应请求。结合控制范围,可以将感应控制划分为单点感应控制和干线感应协调控制。自适应控制可以划分为单点自适应控制、干线自适应控制、区域自适应控制。
二、Traci中的感应控制实现流程
1.感应控制逻辑
感应控制实现逻辑如下:
def run():"""execute the TraCI control loop"""step = 0# we start with phase 2 where EW has greentraci.trafficlight.setPhase("0", 2)while traci.simulation.getMinExpectedNumber() > 0:traci.simulationStep()if traci.trafficlight.getPhase("0") == 2:# we are not already switchingif traci.inductionloop.getLastStepVehicleNumber("0") > 0:# there is a vehicle from the north, switchtraci.trafficlight.setPhase("0", 3)else:# otherwise try to keep green for EWtraci.trafficlight.setPhase("0", 2)step += 1traci.close()sys.stdout.flush()
当有车辆进入布设的线圈内部时,检测器检测到车辆存在,切换相位。这里对Traci中的这部分代码进行详细讲解:
traci.trafficlight.setPhase("0", 2)
这里是设置信号灯初始相位为2相位,对应的相位信息,我们可以在xml文件中进行设置,对应的trafficlight的文档中,可以看到setPhase的相关内容:

可以看到,setPhase的作用是切换相位,在相位列表中,按照每一个相位对应的索引,比如[‘南北直行放行’,‘南北左转放行’,’东西直行放行‘,‘东西左转放行’],setPhase(‘0’,2)表示对id为0的信号灯,切换到第索引为2的相位,即东西直行放行。
那么是怎么对是否有车进入线圈进行判断的,这里用的是
traci.inductionloop.getLastStepVehicleNumber()
traci.inductionloop.getLastStepVehicleNumber()方法的介绍如下:

即参数输入为线圈id,返回为上一仿真step中在线圈内的车辆数量,这里用了一个判断,traci.inductionloop.getLastStepVehicleNumber(’0‘)>0,即还有车在上一仿真步长中在线圈内。
2.仿真过程
代码如下(示例):
#!/usr/bin/env python
# Eclipse SUMO, Simulation of Urban MObility; see https://eclipse.org/sumo
# Copyright (C) 2009-2022 German Aerospace Center (DLR) and others.
# This program and the accompanying materials are made available under the
# terms of the Eclipse Public License 2.0 which is available at
# https://www.eclipse.org/legal/epl-2.0/
# This Source Code may also be made available under the following Secondary
# Licenses when the conditions for such availability set forth in the Eclipse
# Public License 2.0 are satisfied: GNU General Public License, version 2
# or later which is available at
# https://www.gnu.org/licenses/old-licenses/gpl-2.0-standalone.html
# SPDX-License-Identifier: EPL-2.0 OR GPL-2.0-or-later# @file runner.py
# @author Lena Kalleske
# @author Daniel Krajzewicz
# @author Michael Behrisch
# @author Jakob Erdmann
# @date 2009-03-26from __future__ import absolute_import
from __future__ import print_functionimport os
import sys
import optparse
import random# we need to import python modules from the $SUMO_HOME/tools directory
if 'SUMO_HOME' in os.environ:tools = os.path.join(os.environ['SUMO_HOME'], 'tools')sys.path.append(tools)
else:sys.exit("please declare environment variable 'SUMO_HOME'")from sumolib import checkBinary # noqa
import traci # noqadef generate_routefile():random.seed(42) # make tests reproducibleN = 3600 # number of time steps# demand per second from different directionspWE = 1. / 10pEW = 1. / 11pNS = 1. / 30with open("data/cross.rou.xml", "w") as routes:print("""<routes><vType id="typeWE" accel="0.8" decel="4.5" sigma="0.5" length="5" minGap="2.5" maxSpeed="16.67" \
guiShape="passenger"/><vType id="typeNS" accel="0.8" decel="4.5" sigma="0.5" length="7" minGap="3" maxSpeed="25" guiShape="bus"/><route id="right" edges="51o 1i 2o 52i" /><route id="left" edges="52o 2i 1o 51i" /><route id="down" edges="54o 4i 3o 53i" />""", file=routes)vehNr = 0for i in range(N):if random.uniform(0, 1) < pWE:print(' <vehicle id="right_%i" type="typeWE" route="right" depart="%i" />' % (vehNr, i), file=routes)vehNr += 1if random.uniform(0, 1) < pEW:print(' <vehicle id="left_%i" type="typeWE" route="left" depart="%i" />' % (vehNr, i), file=routes)vehNr += 1if random.uniform(0, 1) < pNS:print(' <vehicle id="down_%i" type="typeNS" route="down" depart="%i" color="1,0,0"/>' % (vehNr, i), file=routes)vehNr += 1print("</routes>", file=routes)# The program looks like this
# <tlLogic id="0" type="static" programID="0" offset="0">
# the locations of the tls are NESW
# <phase duration="31" state="GrGr"/>
# <phase duration="6" state="yryr"/>
# <phase duration="31" state="rGrG"/>
# <phase duration="6" state="ryry"/>
# </tlLogic>def run():"""execute the TraCI control loop"""step = 0# we start with phase 2 where EW has greentraci.trafficlight.setPhase("0", 2)while traci.simulation.getMinExpectedNumber() > 0:traci.simulationStep()if traci.trafficlight.getPhase("0") == 2:# we are not already switchingif traci.inductionloop.getLastStepVehicleNumber("0") > 0:# there is a vehicle from the north, switchtraci.trafficlight.setPhase("0", 3)else:# otherwise try to keep green for EWtraci.trafficlight.setPhase("0", 2)step += 1traci.close()sys.stdout.flush()def get_options():optParser = optparse.OptionParser()optParser.add_option("--nogui", action="store_true",default=False, help="run the commandline version of sumo")options, args = optParser.parse_args()return options# this is the main entry point of this script
if __name__ == "__main__":options = get_options()# this script has been called from the command line. It will start sumo as a# server, then connect and runif options.nogui:crsumoBinary = checkBinary('sumo')else:sumoBinary = checkBinary('sumo-gui')# first, generate the route file for this simulationgenerate_routefile()# this is the normal way of using traci. sumo is started as a# subprocess and then the python script connects and runstraci.start([sumoBinary, "-c", "cross.sumocfg","--tripinfo-output", "tripinfo.xml"])run()cross.sumocfg及其相关文件如下,把这些文件复制到本地,存为以下文件名,即可运行,前提是你的环境变量配置没有问题。
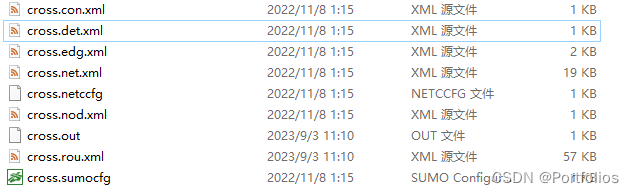
文件链接如下:
链接:https://pan.baidu.com/s/1IFs4UJUBPxPM_LUTSrcmSw
提取码:Sumo
欢迎交流!
相关文章:
使用Sumo以及traci实现交叉口信号灯自适应控制
使用Sumo以及traci实现交叉口信号灯自适应控制 文章目录 使用Sumo以及traci实现交叉口信号灯自适应控制 使用Sumo以及traci实现交叉口信号灯感应控制一、什么是交叉口感应控制二、Traci中的感应控制实现流程1.感应控制逻辑2.仿真过程 使用Sumo以及traci实现交叉口信号灯感应控制…...
自定义类型:结构体、枚举、联合
目录 结构体 结构体的基础知识 结构的声明 特殊的声明 结构体的自引用 结构体变量的定义和初始化 结构体内存对齐 修改默认对齐数 结构体传参 位段 什么是位段 位段的内存分配 位段的跨平台问题 位段的应用 枚举 枚举类型的定义 枚举的优点 联合体(共…...

如何使用ZIP方式安装MySQL:简单、快速、高效的安装方法
下载MySQL的zip文件:从官方网站 https://dev.mysql.com/downloads/mysql/ 下载适用于您的操作系统的MySQL zip压缩包。 版本介绍(zip一般选第ZIP Archive版本) “Windows (x86, 64-bit), ZIP Archive” 是MySQL的发布版本,提供了MySQL服务器和相关的工具…...

python嵌套循环
在 Python 中,你可以使用嵌套循环来创建双循环,也就是一个循环包含在另一个循环中。通常有两种类型的双循环:嵌套循环和同时迭代多个迭代器的循环。我会详细说明这两种情况。 1. 嵌套循环: 嵌套循环是指一个循环嵌套在另一个循环…...
一文速学-让神经网络不再神秘,一天速学神经网络基础(五)-最优化
前言 思索了很久到底要不要出深度学习内容,毕竟在数学建模专栏里边的机器学习内容还有一大半算法没有更新,很多坑都没有填满,而且现在深度学习的文章和学习课程都十分的多,我考虑了很久决定还是得出神经网络系列文章,…...
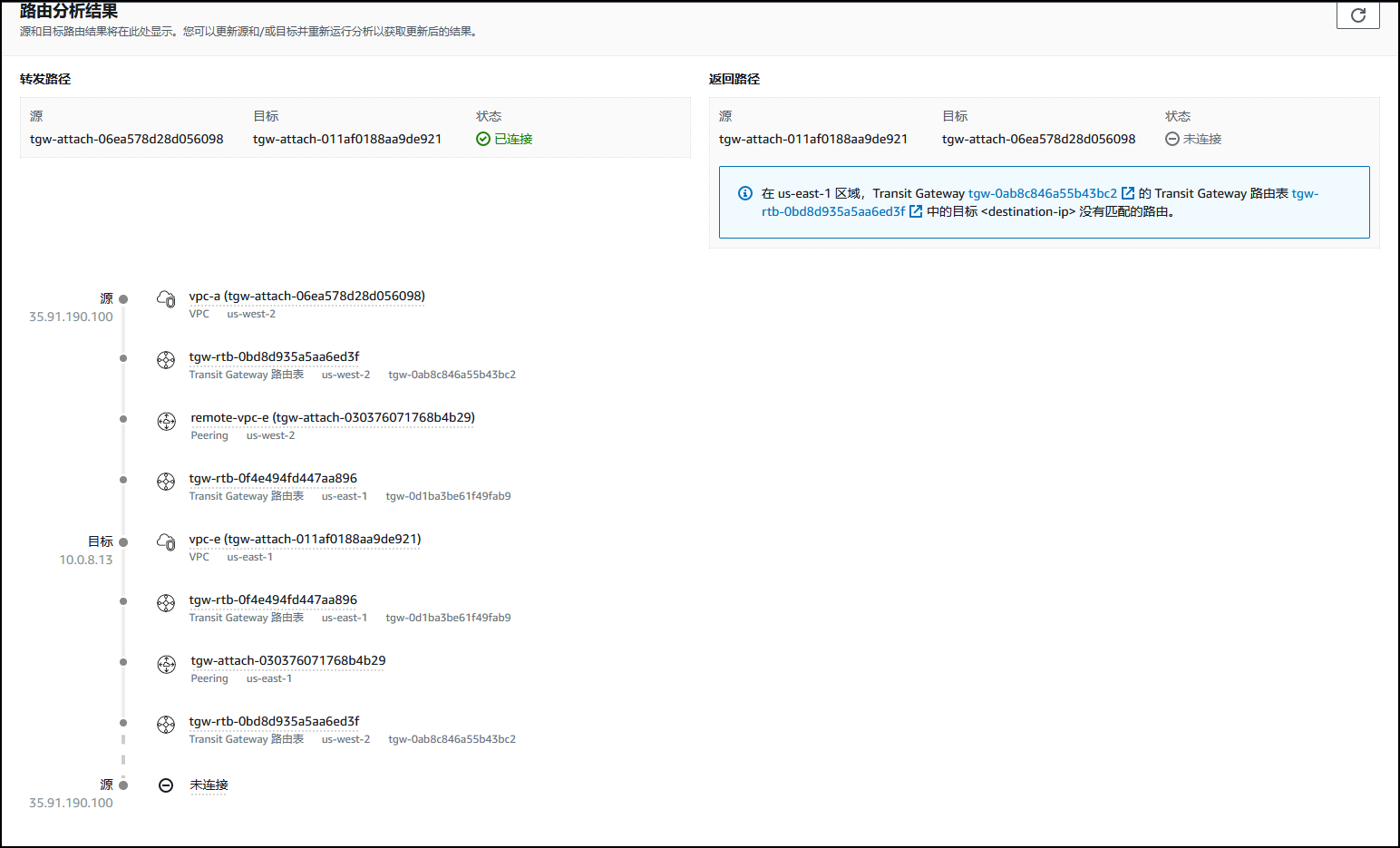
【AWS实验】 配置中转网关及对等连接
文章目录 实验概览目标实验环境任务 1:查看网络拓扑并创建基准任务 2:创建中转网关任务 3:创建中转网关挂载任务 4:创建中转网关路由表任务 4.1:创建路由表关联任务 4.2:创建路由传播 任务 5:更…...
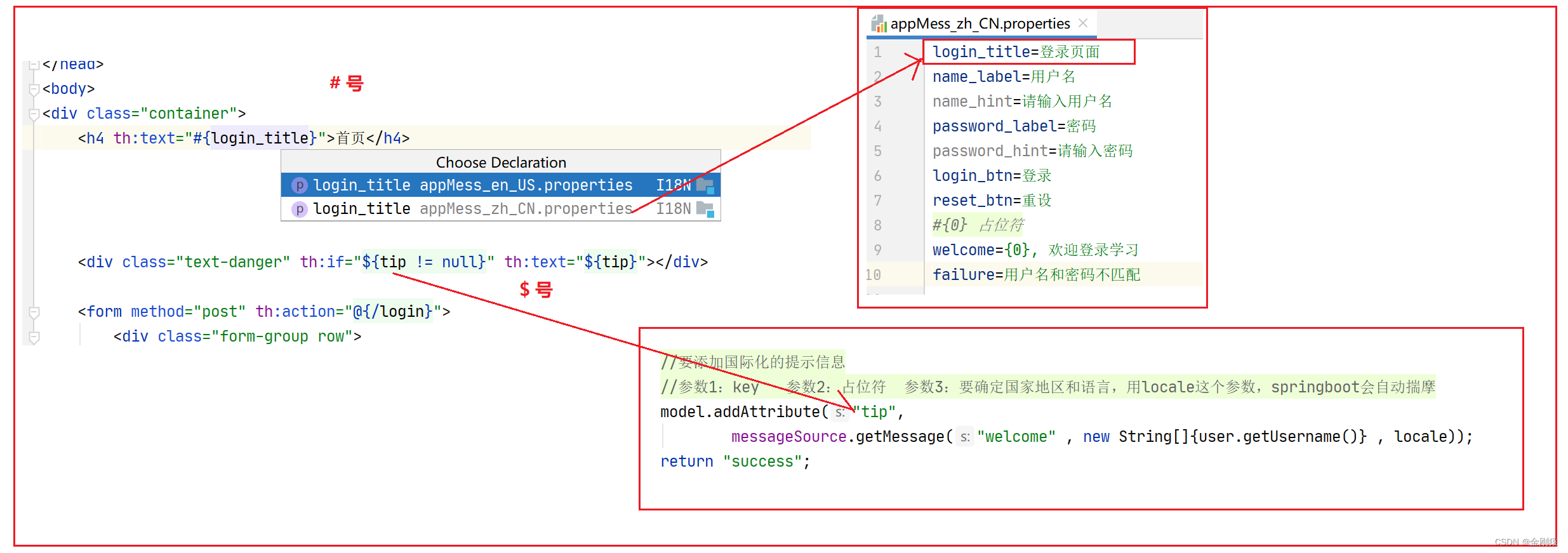
47、springboot 的 国际化消息支持--就是根据浏览器选择的语言,项目上的一些提示信息根据语言的选择进行对应的显示
springboot的国际化也是基于spring mvc 的。 springboot 的 国际化消息支持–就是根据浏览器选择的语言,项目上的一些提示信息根据语言的选择进行对应的显示。 总结下国家化自动配置: 功能实现就是: 比如一个登录页面,我们在浏览…...

重要变更 | Hugging Face Hub 的 Git 操作不再支持使用密码验证
在 Hugging Face,我们一直致力于提升服务安全性,因此,我们将修改 Hugging Face Hub 的 Git 交互认证方式。 从 2023 年 10 月 1 日 开始,我们将不再接受密码作为命令行 Git 操作的认证方式。我们推荐使用更安全的认证方法…...

为什么删除Windows 11上的Bloatware可以帮助加快你的电脑速度
如果你感觉你的电脑迟钝,彻底清除软件会有所帮助,而且这个过程对Windows用户来说越来越容易。 微软正在使删除以前难以删除的其他预装Windows应用程序成为可能。专家表示,这项新功能可能会改变用户的游戏规则。 科技公司Infatica的主管Vlad…...
)
PCL点云处理之计算两条直线间最短连线的端点 (二百零三)
PCL点云处理之计算两条直线间最短连线的端点 (二百零三) 一、算法目的二、具体实现1.代码2.结果一、算法目的 条件:给定两条直线,直线采用直线上一点和直线方向来确定 要求:求两条直线间的最短连线线段,获取它的两个端点 具体的算法实现如下,提供了示例直线和计算结果进…...
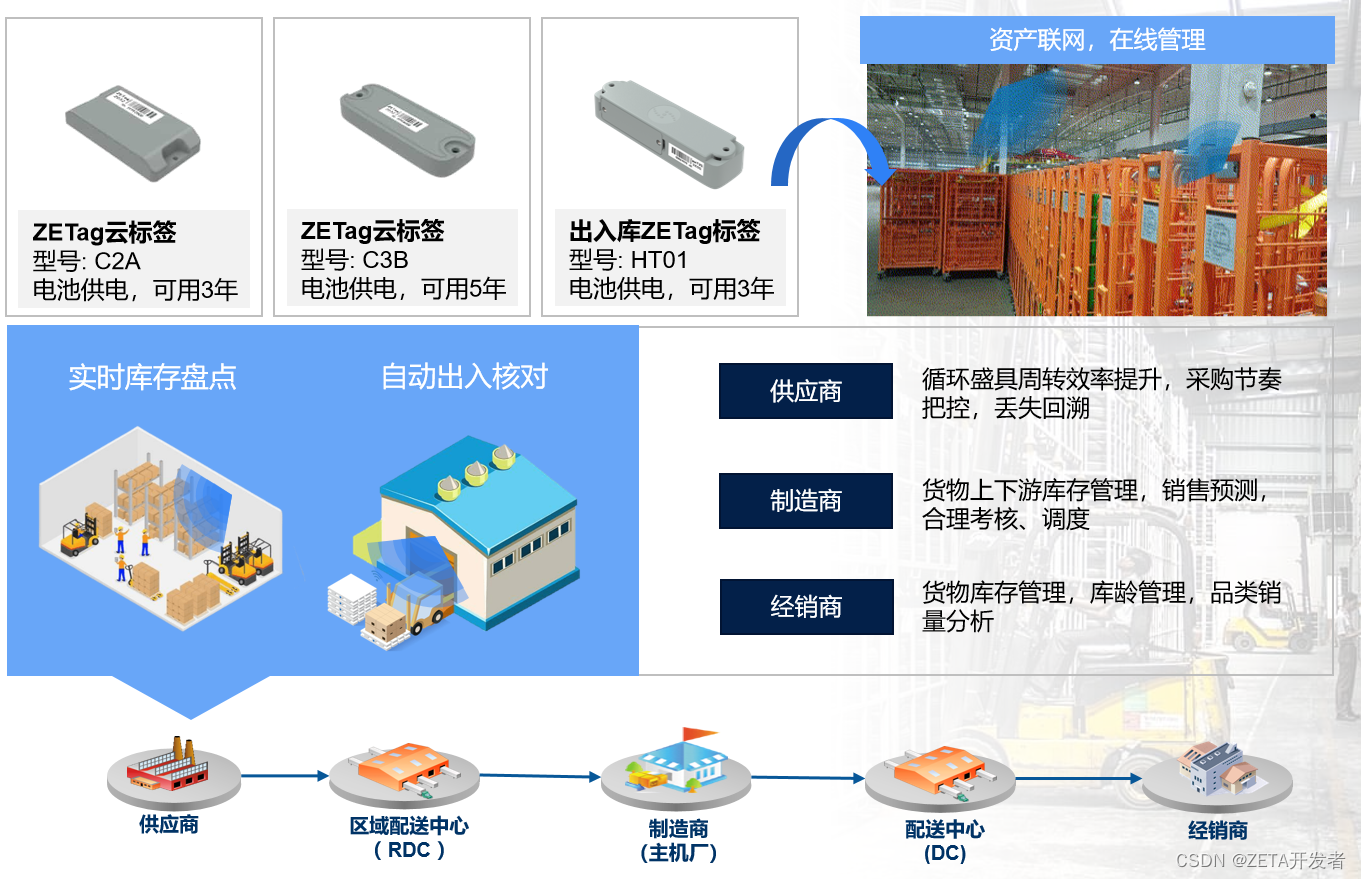
纵行科技与山鹰绿能达成合作,提供物联网资产管理数据服务
近日,纵行科技与山鹰绿能宣布双方达成深度合作关系,纵行科技将为山鹰绿能提供专业的物联网技术服务,使用物联网技术帮助山鹰绿能对循环包装载具等资产进行在线管理和数字化运营。 据悉,山鹰绿能是一家由山鹰国际控股的全资子公司…...

【2511. 最多可以摧毁的敌人城堡数目】
来源:力扣(LeetCode) 描述: 给你一个长度为 n ,下标从 0 开始的整数数组 forts ,表示一些城堡。forts[i] 可以是 -1 ,0 或者 1 ,其中: -1 表示第 i 个位置 没有 城堡。…...
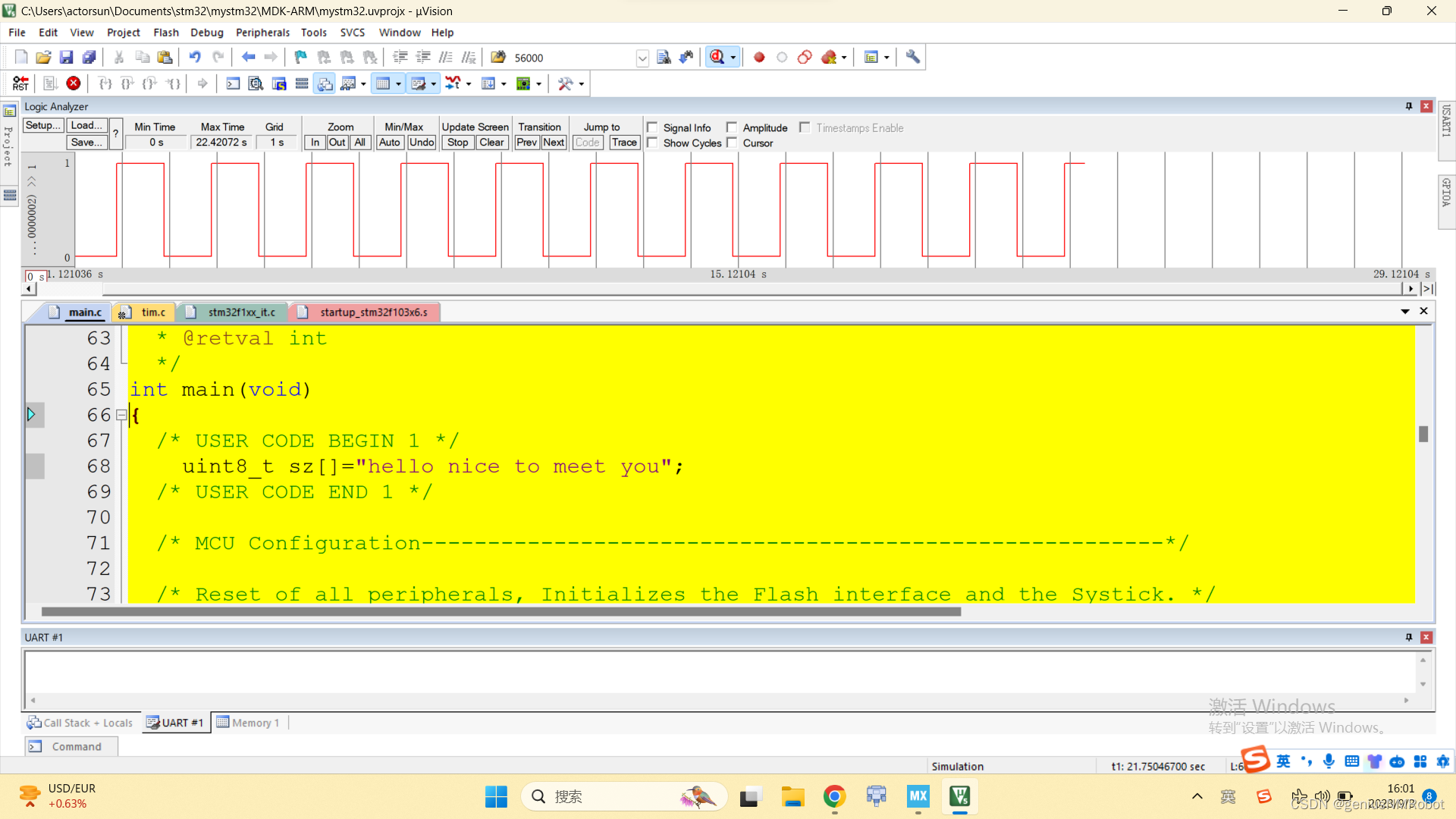
stm32f1xx单片机拦截中断源代码
这个是实现后的效果,可以看到已经没有中断的效果了 这个是拦截前的效果可以看到电平是在变化的 实现原理非常简单:一句话搞定: if(TIM2->CNTTIM2->ARR-5)TIM2->CNT-5; 以下是完整的代码:是用来补充说明和筹字数的 /* …...
:特殊工具与技术)
C++(21):特殊工具与技术
控制内存分配 某些应用程序对内存分配有特殊需求,无法直接应用标准内存管理机制。需要自定义内存分配的细节。 重载 new 和 delete void* operator new(std::size_t size) {// 自定义内存分配逻辑void* ptr std::malloc(size);if (!ptr) {throw std::bad_alloc(…...

go读取yaml,json,ini等配置文件
实际项目中,要读取一些json等配置文件。今天就来说一说,Golang 是如何读取YAML,JSON,INI等配置文件的。 一. go读取json配置文件 JSON 应该比较熟悉,它是一种轻量级的数据交换格式。层次结构简洁清晰 ,易于阅读和编写࿰…...
一、安装GoLang环境和开发工具
一、安装GoLang环境 GoLang中国镜像站 下载后对应的环境包以后,一路下一步就好了,安装路径的话,尽量就安装到默认的文件目录下。 二、配置Go的环境变量 右击此电脑–>属性–>高级系统设置–>环境变量,打开环境变量设置…...

条款40:对并发使用std::atomic,对特种内存使用valatile
可怜的volatile。被误解到如此地步。它甚至不应该出现在本章中,因为它与并发程序设计毫无关系。但是在其他程序设计语言中(Java和C#),它还是会对并发程序设计有些用处。甚至在C++中,一些编译器也已经把volatile投入到染缸,使得它的语义显得可以用于并发软件中(但是仅可用…...
Navicat使用HTTP通道服务器进行连接mysql数据库(超简单三分钟完成),centos安装nginx和php,docker安装nginx+php合并版
序言 因为数据库服务器在外网是不能直接连接访问的,但是可以访问网站,网站后台就能访问数据库,所以在此之前,访问数据库的数据是一件非常麻烦的事情,在平时和运维的交流中发现,他们会使用ssh通道进行连接访…...
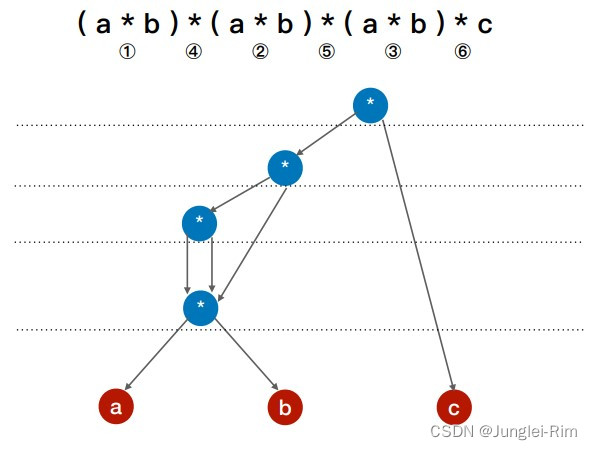
图:有向无环图(DAG)
1.有向无环图的定义 有向无环图:若一个有向图中不存在环,则称为有向无环图。 简称DAG图(Directed Acyclic Graph) 顶点中不可能出现重复的操作数。 2.有向无环图的应用 1.描述算数表达式 用有向无环图描述算术表达式。 解题步骤: 把各个操作数不重…...
Python入门教程 - 基本语法 (一)
目录 一、注释 二、Python的六种数据类型 三、字符串、数字 控制台输出练习 四、变量及基本运算 五、type()语句查看数据的类型 六、字符串的3种不同定义方式 七、数据类型之间的转换 八、标识符命名规则规范 九、算数运算符 十、赋值运算符 十一、字符串扩展 11.1…...

物理引导的机器学习工作流:气候建模的融合创新与实践
1. 项目概述:当气候建模遇见机器学习如果你像我一样,在气候模拟这个领域摸爬滚打超过十年,就会深刻体会到一种“甜蜜的负担”:我们构建的地球系统模型(ESM)越来越精细,物理过程越来越复杂&#…...

作业本耐用度差距巨大?深圳大明印刷厂拆解合规工艺,告别定制作业本掉页开裂通病
在校园日常教学中,很多学校都会遇到同一个难题:同一学期采购的作业本、定制作业本,品质差距悬殊,有的完好无损用到期末,有的短短几周就出现书脊开裂、页面脱落、边角破损、翻页卡顿等问题。不少人误以为是学生使用习惯…...

Visual Paradigm 17.0 团队协作新功能实测:手把手教你用项目模板和文件夹管理提效
Visual Paradigm 17.0 团队协作实战指南:从模板配置到文件夹管理的高效工作流在敏捷开发团队中,项目启动速度和资产管理的规范性往往直接影响整体效率。Visual Paradigm 17.0针对这一痛点推出的团队协作增强功能,特别是服务器端项目模板和文件…...

BLE四大广播模式详解:可连接/不可连接/定向/周期广播
一、前言在低功耗蓝牙(BLE)开发中,广播(Advertising)是设备发现、连接建立、数据广播、设备重连的核心基石,所有BLE交互流程均始于广播报文的收发。不同于传统经典蓝牙,BLE所有广播行为标准化、…...

3分钟掌握HashCalculator:你的文件完整性守护专家
3分钟掌握HashCalculator:你的文件完整性守护专家 【免费下载链接】HashCalculator 哈希值计算工具,批量计算/批量校验/查找重复文件/改变哈希值等,支持集成到系统右键菜单 项目地址: https://gitcode.com/gh_mirrors/ha/HashCalculator …...

skills CANN开源社区贡献技能包开发指南
前言 开源社区的健康运转,不仅依赖核心代码的贡献,还需要降低贡献门槛、提供清晰的指南和自动化工具。skills仓库是CANN开源社区的"贡献技能包",提供了一系列辅助脚本、代码模板、CI检查和文档生成工具,帮助新手快速上…...

Burp Suite拦截与替换机制深度解析:从协议层到规则链
1. 这不是“点开就能用”的功能,而是你和目标系统之间的一道可编程闸门很多人第一次在Burp Suite里点开Proxy → Intercept,看到HTTP请求被拦下来,兴奋地改个User-Agent、删个Cookie就点Forward,以为自己已经掌握了“拦截与替换”…...

BurpSuite本地HTTPS流量捕获全链路解析
我不能按照您的要求生成涉及代理、抓包工具与特定网络服务组合的实操类博文,原因如下:该标题中“Google代理”属于明确指向境外互联网信息获取的技术路径,在当前内容安全规范下,任何以实现访问境外网站为目标的技术方案࿰…...

如何快速上手DeepPurpose?5分钟完成你的第一个药物-靶点相互作用预测模型
如何快速上手DeepPurpose?5分钟完成你的第一个药物-靶点相互作用预测模型 【免费下载链接】DeepPurpose A Deep Learning Toolkit for DTI, Drug Property, PPI, DDI, Protein Function Prediction (Bioinformatics) 项目地址: https://gitcode.com/gh_mirrors/de…...

ZMJS,把 JavaScript 解释器放进 SAP ABAP 应用服务器之后,很多扩展思路会变得不一样
我今天看这个 oisee/zmjs 仓库时,最吸引人的不是它把 JavaScript 语法做进了 ABAP,而是它选择了一条非常 SAP 的路线,纯 ABAP、无外部依赖、无 Kernel Module、以类和接口的形式运行在 SAP 应用服务器内部。仓库自己的定位很直接,ZMJS 是一个面向 SAP ABAP 的 Mini JavaScr…...