支持向量机(二)
文章目录
- 前言
- 具体内容
前言
总算要对稍微有点难度的地方动手了,前面介绍的线性可分或者线性不可分的情况,都是使用平面作为分割面的,现在我们采用另一种分割面的设计方法,也就是核方法。
核方法涉及的分割面不再是 w x + b = 0 wx+b=0 wx+b=0,而是 f ( x ) = 0 f(x)=0 f(x)=0了。
具体内容
核方法其实就是坐标映射方法,类似于我们进行回归的时候对于反函数曲线采用 y = w x + b y=\frac{w}{x}+b y=xw+b的形式来对数据进行拟合。
我们常用的标准做法都是先将原始数据 x x x映射为 1 x \frac{1}{x} x1,然后对于数据 ( 1 x , y ) (\frac{1}{x},y) (x1,y)寻找线性函数 y = k t + b y=kt+b y=kt+b来拟合。
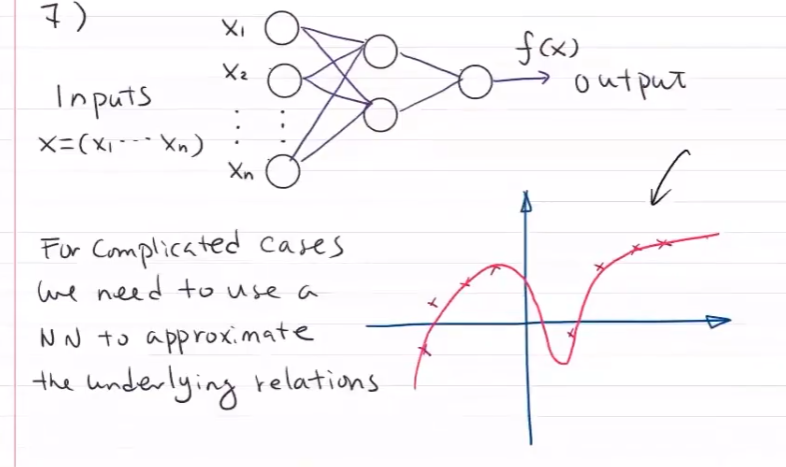
在非线性支持向量机中,我们需要把原始特征x通过映射函数变换为 ϕ ( x ) \phi(x) ϕ(x),对于这个映射函数没有什么要求,只不过什么样的映射函数映射以后分类效果最佳是未知的,是需要通过比较才能发现的。
映射函数一般都是把原始特征 x x x变为另一个向量 [ 1 , x 1 , ⋯ , x n , x 1 2 , ⋯ , x i x j , ⋯ , x n 2 , ⋯ ] [1,x_1,\cdots,x_n,x_1^2,\cdots,x_ix_j,\cdots,x_n^2,\cdots] [1,x1,⋯,xn,x12,⋯,xixj,⋯,xn2,⋯]其中的一项或者几项,具体是几项视具体情况确定,这个的目标是保留原始信息同时要增加尽可能多的生成信息,所以一般往高维方向映射。
当然这个函数设计好以后,我们在支持向量机的对偶函数中其实计算的是 K ( x i , x j ) K(x_i,x_j) K(xi,xj),这个函数是上面映射函数的乘积,可能计算更加复杂,所以从方便对偶函数的计算角度出发,设计了专门的对偶核函数,不过对偶核函数是有要求的,需要对所有特征 x x x所构成的gram矩阵是半正定的。
而这种情况下我们可以设计方便计算的核函数,比如:
多项式核函数: K ( x , z ) = ( x ⋅ z + 1 ) p K(x,z)=(x\cdot z+1)^p K(x,z)=(x⋅z+1)p,计算难度大大减小,而且这个多项式核函数对应的映射函数也比较好求:
K ( x , z ) = ( x ⋅ z + 1 ) 2 = ( x 1 z 1 + x 2 z 2 + 1 ) 2 = x 1 2 z 1 2 + 2 x 1 x 2 z 1 z 2 + 2 x 1 z 1 + x 2 2 z 2 2 + 2 x 2 z 2 + 1 = [ x 1 2 , 2 x 1 x 2 , 2 x 1 , x 2 2 , 2 x 2 , 1 ] ∗ [ z 1 2 , 2 z 1 z 2 , 2 z 1 , z 2 2 , 2 z 2 , 1 ] T \begin{align*} K(x,z)&=(x\cdot z+1)^2\\ &=(x_1z_1+x_2z_2+1)^2\\ &=x_1^2z_1^2+2x_1x_2z_1z_2+2x_1z_1+x_2^2z_2^2+2x_2z_2+1\\ &=[x_1^2,\sqrt{2}x_1x_2,\sqrt{2}x_1,x_2^2,\sqrt{2}x_2,1]*[z_1^2,\sqrt{2}z_1z_2,\sqrt{2}z_1,z_2^2,\sqrt{2}z_2,1]^T \end{align*} K(x,z)=(x⋅z+1)2=(x1z1+x2z2+1)2=x12z12+2x1x2z1z2+2x1z1+x22z22+2x2z2+1=[x12,2x1x2,2x1,x22,2x2,1]∗[z12,2z1z2,2z1,z22,2z2,1]T
相当于截取了泰勒展开式中的前几项。
换句话说,如果我们想将坐标映射为 [ 1 , x 1 , x 2 , x 1 2 , x 1 x 2 , x 2 2 ] [1,x_1,x_2,x_1^2,x_1x_2,x_2^2] [1,x1,x2,x12,x1x2,x22],然后利用映射后的坐标来计算 w [ 1 , x 1 , x 2 , x 1 2 , x 1 x 2 , x 2 2 ] T + b w[1,x_1,x_2,x_1^2,x_1x_2,x_2^2]^T+b w[1,x1,x2,x12,x1x2,x22]T+b来作为判别函数,那么这个分界面问题的对偶函数中 ϕ ( x i ) ϕ ( x j ) \phi(x_i)\phi(x_j) ϕ(xi)ϕ(xj)就是上面的 ( x ⋅ z + 1 ) p (x\cdot z+1)^p (x⋅z+1)p的形式,也就是我们不用知道中间映射后的坐标,而可以直接计算 ( x i ⋅ x j + 1 ) p (x_i\cdot x_j+1)^p (xi⋅xj+1)p。
高斯核函数; K ( x , z ) = exp ( − ∥ x − z ∥ 2 2 σ 2 ) K(x,z)=\exp(-\frac{{\|x-z\|}^2}{2\sigma^2}) K(x,z)=exp(−2σ2∥x−z∥2),计算难度大大减小,但是这个核函数对应的映射函数不容易求出来。
K ( x , z ) = exp ( − ( x 1 − z 1 ) 2 + ( x 2 − z 2 ) 2 2 σ 2 ) = exp ( − x 1 2 + z 1 2 − 2 x 1 z 1 + x 2 2 + z 2 2 − 2 x 2 z 2 2 σ 2 ) = exp ( − x 1 2 2 σ 2 ) exp ( − z 1 2 2 σ 2 ) exp ( − x 2 2 2 σ 2 ) exp ( − z 2 2 2 σ 2 ) exp ( 2 x 1 z 1 2 σ 2 ) exp ( 2 x 2 z 2 2 σ 2 ) = exp ( − x 1 2 2 σ 2 ) exp ( − z 1 2 2 σ 2 ) exp ( − x 2 2 2 σ 2 ) exp ( − z 2 2 2 σ 2 ) [ 1 + 2 x 1 z 1 2 σ 2 + ⋯ + 1 n ! ( 2 x 1 z 1 2 σ 2 ) n + ⋯ ] [ 1 + 2 x 2 z 2 2 σ 2 + ⋯ + 1 n ! ( 2 x 2 z 2 2 σ 2 ) n + ⋯ ] = exp ( − x 1 2 2 σ 2 ) exp ( − z 1 2 2 σ 2 ) exp ( − x 2 2 2 σ 2 ) exp ( − z 2 2 2 σ 2 ) [ ∑ t = 0 + ∞ ∑ k = 0 + ∞ 1 t ! ( 2 x 1 z 1 2 σ 2 ) t 1 k ! ( 2 x 2 z 2 2 σ 2 ) k ] = exp ( − x 1 2 2 σ 2 ) exp ( − x 2 2 2 σ 2 ) [ 1 , x 1 σ , ⋯ , 1 n ! ( x 1 σ ) n , ⋯ , x 2 σ , x 1 x 2 σ 2 , ⋯ , 1 n ! ( x 1 n x 2 σ n + 1 ) , ⋯ , 1 t ! n ! x 1 t x 2 n σ t + n , ⋯ ] ∗ exp ( − z 1 2 2 σ 2 ) exp ( − z 2 2 2 σ 2 ) [ 1 , z 1 σ , ⋯ , 1 n ! ( z 1 σ ) n , ⋯ , z 2 σ , z 1 z 2 σ 2 , ⋯ , 1 n ! ( z 1 n z 2 σ n + 1 ) , ⋯ , 1 t ! n ! z 1 t z 2 n σ t + n , ⋯ ] \begin{align*} K(x,z)=&\exp(-\frac{(x_1-z_1)^2+(x_2-z_2)^2}{2\sigma^2})\\ =&\exp(-\frac{x_1^2+z_1^2-2x_1z_1+x_2^2+z_2^2-2x_2z_2}{2\sigma^2})\\ =&\exp(-\frac{x_1^2}{2\sigma^2})\exp(-\frac{z_1^2}{2\sigma^2})\exp(-\frac{x_2^2}{2\sigma^2})\exp(-\frac{z_2^2}{2\sigma^2})\exp(\frac{2x_1z_1}{2\sigma^2})\exp(\frac{2x_2z_2}{2\sigma^2})\\ =&\exp(-\frac{x_1^2}{2\sigma^2})\exp(-\frac{z_1^2}{2\sigma^2})\exp(-\frac{x_2^2}{2\sigma^2})\exp(-\frac{z_2^2}{2\sigma^2})[1+\frac{2x_1z_1}{2\sigma^2}+\cdots+\frac{1}{n!}(\frac{2x_1z_1}{2\sigma^2})^n+\cdots][1+\frac{2x_2z_2}{2\sigma^2}+\cdots+\frac{1}{n!}(\frac{2x_2z_2}{2\sigma^2})^n+\cdots]\\ =&\exp(-\frac{x_1^2}{2\sigma^2})\exp(-\frac{z_1^2}{2\sigma^2})\exp(-\frac{x_2^2}{2\sigma^2})\exp(-\frac{z_2^2}{2\sigma^2})[\sum_{t=0}^{+\infty}\sum_{k=0}^{+\infty}\frac{1}{t!}(\frac{2x_1z_1}{2\sigma^2})^t\frac{1}{k!}(\frac{2x_2z_2}{2\sigma^2})^k]\\ =&\exp(-\frac{x_1^2}{2\sigma^2})\exp(-\frac{x_2^2}{2\sigma^2})[1,\frac{x_1}{\sigma},\cdots,\sqrt{\frac{1}{n!}}(\frac{x_1}{\sigma})^n,\cdots,\frac{x_2}{\sigma},\frac{x_1x_2}{\sigma^2},\cdots,\sqrt{\frac{1}{n!}}(\frac{x_1^nx_2}{\sigma^{n+1}}),\cdots,\sqrt{\frac{1}{t!n!}}\frac{x_1^tx_2^n}{\sigma^{t+n}},\cdots]*\\ &\exp(-\frac{z_1^2}{2\sigma^2})\exp(-\frac{z_2^2}{2\sigma^2})[1,\frac{z_1}{\sigma},\cdots,\sqrt{\frac{1}{n!}}(\frac{z_1}{\sigma})^n,\cdots,\frac{z_2}{\sigma},\frac{z_1z_2}{\sigma^2},\cdots,\sqrt{\frac{1}{n!}}(\frac{z_1^nz_2}{\sigma^{n+1}}),\cdots,\sqrt{\frac{1}{t!n!}}\frac{z_1^tz_2^n}{\sigma^{t+n}},\cdots] \end{align*} K(x,z)======exp(−2σ2(x1−z1)2+(x2−z2)2)exp(−2σ2x12+z12−2x1z1+x22+z22−2x2z2)exp(−2σ2x12)exp(−2σ2z12)exp(−2σ2x22)exp(−2σ2z22)exp(2σ22x1z1)exp(2σ22x2z2)exp(−2σ2x12)exp(−2σ2z12)exp(−2σ2x22)exp(−2σ2z22)[1+2σ22x1z1+⋯+n!1(2σ22x1z1)n+⋯][1+2σ22x2z2+⋯+n!1(2σ22x2z2)n+⋯]exp(−2σ2x12)exp(−2σ2z12)exp(−2σ2x22)exp(−2σ2z22)[t=0∑+∞k=0∑+∞t!1(2σ22x1z1)tk!1(2σ22x2z2)k]exp(−2σ2x12)exp(−2σ2x22)[1,σx1,⋯,n!1(σx1)n,⋯,σx2,σ2x1x2,⋯,n!1(σn+1x1nx2),⋯,t!n!1σt+nx1tx2n,⋯]∗exp(−2σ2z12)exp(−2σ2z22)[1,σz1,⋯,n!1(σz1)n,⋯,σz2,σ2z1z2,⋯,n!1(σn+1z1nz2),⋯,t!n!1σt+nz1tz2n,⋯]
所以两个映射函数分别如上所示:
ϕ ( x ) = exp ( − x 1 2 2 σ 2 ) exp ( − x 2 2 2 σ 2 ) [ 1 , x 1 σ , ⋯ , 1 n ! ( x 1 σ ) n , ⋯ , x 2 σ , x 1 x 2 σ 2 , ⋯ , 1 n ! ( x 1 n x 2 σ n + 1 ) , ⋯ , 1 t ! n ! x 1 t x 2 n σ t + n , ⋯ ] \phi(x)=\exp(-\frac{x_1^2}{2\sigma^2})\exp(-\frac{x_2^2}{2\sigma^2})[1,\frac{x_1}{\sigma},\cdots,\sqrt{\frac{1}{n!}}(\frac{x_1}{\sigma})^n,\cdots,\frac{x_2}{\sigma},\frac{x_1x_2}{\sigma^2},\cdots,\sqrt{\frac{1}{n!}}(\frac{x_1^nx_2}{\sigma^{n+1}}),\cdots,\sqrt{\frac{1}{t!n!}}\frac{x_1^tx_2^n}{\sigma^{t+n}},\cdots] ϕ(x)=exp(−2σ2x12)exp(−2σ2x22)[1,σx1,⋯,n!1(σx1)n,⋯,σx2,σ2x1x2,⋯,n!1(σn+1x1nx2),⋯,t!n!1σt+nx1tx2n,⋯]
如果只看后面的向量的话,他就是泰勒展开式中各个项,但是它前面还乘上了系数 exp ( − x 1 2 2 σ 2 ) exp ( − x 2 2 2 σ 2 ) \exp(-\frac{x_1^2}{2\sigma^2})\exp(-\frac{x_2^2}{2\sigma^2}) exp(−2σ2x12)exp(−2σ2x22)缩放了一下。
换句话说,这个映射函数把原始特征映射为了一个无穷维的坐标,我们实际上做的是用这个映射后的坐标 exp ( − x 1 2 2 σ 2 ) exp ( − x 2 2 2 σ 2 ) [ 1 , x 1 σ , ⋯ , 1 n ! ( x 1 σ ) n , ⋯ , x 2 σ , x 1 x 2 σ 2 , ⋯ , 1 n ! ( x 1 n x 2 σ n + 1 ) , ⋯ , 1 t ! n ! x 1 t x 2 n σ t + n , ⋯ ] \exp(-\frac{x_1^2}{2\sigma^2})\exp(-\frac{x_2^2}{2\sigma^2})[1,\frac{x_1}{\sigma},\cdots,\sqrt{\frac{1}{n!}}(\frac{x_1}{\sigma})^n,\cdots,\frac{x_2}{\sigma},\frac{x_1x_2}{\sigma^2},\cdots,\sqrt{\frac{1}{n!}}(\frac{x_1^nx_2}{\sigma^{n+1}}),\cdots,\sqrt{\frac{1}{t!n!}}\frac{x_1^tx_2^n}{\sigma^{t+n}},\cdots] exp(−2σ2x12)exp(−2σ2x22)[1,σx1,⋯,n!1(σx1)n,⋯,σx2,σ2x1x2,⋯,n!1(σn+1x1nx2),⋯,t!n!1σt+nx1tx2n,⋯]去构成分界面 w exp ( − x 1 2 2 σ 2 ) exp ( − x 2 2 2 σ 2 ) [ 1 , x 1 σ , ⋯ , 1 n ! ( x 1 σ ) n , ⋯ , x 2 σ , x 1 x 2 σ 2 , ⋯ , 1 n ! ( x 1 n x 2 σ n + 1 ) , ⋯ , 1 t ! n ! x 1 t x 2 n σ t + n , ⋯ ] + b w\exp(-\frac{x_1^2}{2\sigma^2})\exp(-\frac{x_2^2}{2\sigma^2})[1,\frac{x_1}{\sigma},\cdots,\sqrt{\frac{1}{n!}}(\frac{x_1}{\sigma})^n,\cdots,\frac{x_2}{\sigma},\frac{x_1x_2}{\sigma^2},\cdots,\sqrt{\frac{1}{n!}}(\frac{x_1^nx_2}{\sigma^{n+1}}),\cdots,\sqrt{\frac{1}{t!n!}}\frac{x_1^tx_2^n}{\sigma^{t+n}},\cdots]+b wexp(−2σ2x12)exp(−2σ2x22)[1,σx1,⋯,n!1(σx1)n,⋯,σx2,σ2x1x2,⋯,n!1(σn+1x1nx2),⋯,t!n!1σt+nx1tx2n,⋯]+b作为分界面,其中 w w w为无穷维向量,那么这个分界面问题的对偶函数中 ϕ ( x i ) ϕ ( x j ) \phi(x_i)\phi(x_j) ϕ(xi)ϕ(xj)就是上面的 exp ( − ( x 1 − z 1 ) 2 + ( x 2 − z 2 ) 2 2 σ 2 ) \exp(-\frac{(x_1-z_1)^2+(x_2-z_2)^2}{2\sigma^2}) exp(−2σ2(x1−z1)2+(x2−z2)2)的形式,也就是我们不用知道中间映射后的坐标,而可以直接计算 exp ( − ( x 1 − z 1 ) 2 + ( x 2 − z 2 ) 2 2 σ 2 ) \exp(-\frac{(x_1-z_1)^2+(x_2-z_2)^2}{2\sigma^2}) exp(−2σ2(x1−z1)2+(x2−z2)2)。
相关文章:
)
支持向量机(二)
文章目录 前言具体内容 前言 总算要对稍微有点难度的地方动手了,前面介绍的线性可分或者线性不可分的情况,都是使用平面作为分割面的,现在我们采用另一种分割面的设计方法,也就是核方法。 核方法涉及的分割面不再是 w x b 0 wx…...
Arrays.asList 和 null 类型
一、Arrays.asList 类型简析 Arrays.asList() 返回的List 是它的内部类,不能使用 retainAll() 取交集,导致元素的删除,会报错。 List<String> list Arrays.asList(value.split(",")); 替换为> List<String> list…...

《论文阅读》用提示和释义模拟对话情绪识别的思维过程 IJCAI 2023
《论文阅读》用提示和复述模拟对话情绪识别的思维过程 IJCAI 2023 前言简介相关知识prompt engineeringparaphrasing模型架构第一阶段第二阶段History-oriented promptExperience-oriented Prompt ConstructionLabel Paraphrasing损失函数前言 你是否也对于理解论文存在困惑?…...
【AI】机器学习——绪论
文章目录 1.1 机器学习概念1.1.1 定义统计机器学习与数据挖掘区别机器学习前提 1.1.2 术语1.1.3 特点以数据为研究对象目标方法——基于数据构建模型SML三要素SML步骤 1.2 分类1.2.1 参数化/非参数化方法1.2.2 按算法分类1.2.3 按模型分类概率模型非概率模型逻辑斯蒂回归 1.2.4…...

linux 查看端口占用
查看端口占用 使用lsof 可以使用lsof -i:端口号 来查看端口占用情况 lsof -i:8010COMMAND PID USER FD TYPE DEVICE SIZE/OFF NODE NAMEnginx 35653 zhanghe 10u IPv4 0xcac2e413ddf9c5b9 0t0 TCP *:8010 (LISTEN)nginx 35654 zhanghe 10u…...

modernC++手撸任意层神经网络22前向传播反向传播梯度下降等23代码补全的例子0901b
以下神经网络代码,请添加输入:{{1,0},{1,1}},输出{1,0};添加反向传播,梯度下降等训练! 以下神经网络代码,请添加输入:{{1,0},{1,1}},输出{1,0};添加反向传播,梯度下降等训练! #include <iostream> #include<vector> #include<Eigen/Dense> #include<rando…...
tkinter控件样式
文章目录 以按钮为例共有参数动态属性 tkinter系列: GUI初步💎布局💎绑定变量💎绑定事件💎消息框💎文件对话框💎控件样式扫雷小游戏💎强行表白神器 以按钮为例 tkinter对控件的诸…...

【linux命令讲解大全】042. 深入了解 which 命令:查找和显示命令的绝对路径
文章目录 which补充说明语法选项参数实例 从零学 python which 查找并显示给定命令的绝对路径 补充说明 which 命令用于查找并显示给定命令的绝对路径,环境变量 PATH 中保存了查找命令时需要遍历的目录。which 指令会在环境变量 $PATH 设置的目录里查找符合条件的…...
实战项目 在线学院之集成springsecurity的配置以及执行流程
一 后端操作配置 1.0 工程结构 1.1 在common下创建spring_security模块 1.2 pom文件中依赖的注入 1.3 在service_acl模块服务中引入spring-security权限认证模块 1.3.1 service_acl引入spring-security 1.3.2 在service_acl编写查询数据库信息 定义userDetailServiceImpl 查…...
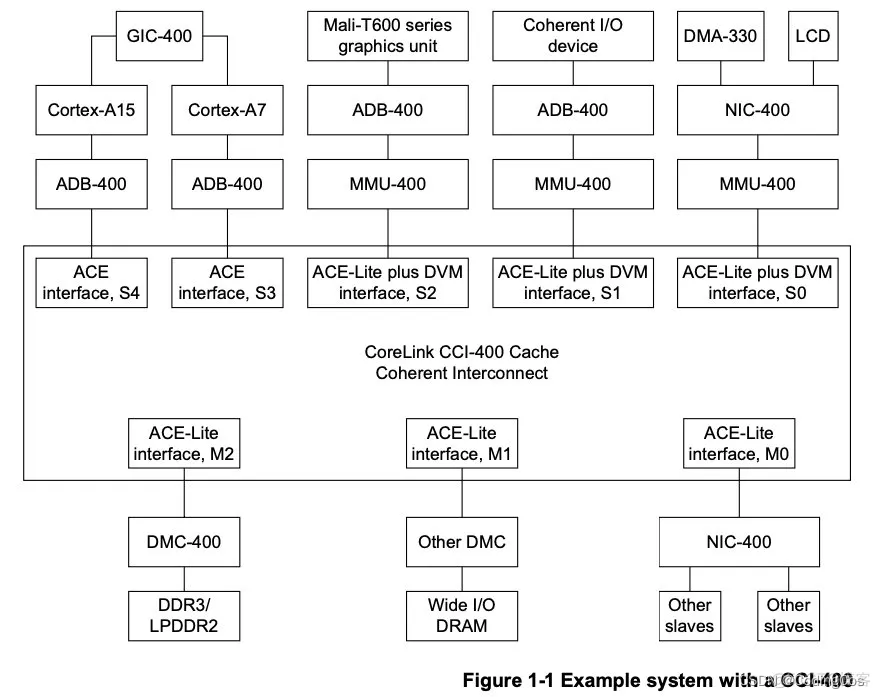
【ARM CoreLink CCI-400 控制器简介】
文章目录 CCI-400 介绍 CCI-400 介绍 CCI(Cache Coherent Interconnect)是ARM 中 的Cache一致性控制器。 CCI-400 将 Interconnect 和coherency 功能结合到一个模块中。它支持多达两个ACE master 点的interface,例如: Cortex-A…...
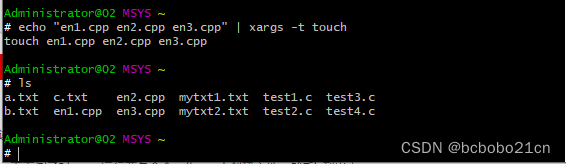
Linux xargs命令继续学习
之前学习过Linux xargs,对此非常的不熟悉,下面继续学习一下; xargs 可以将管道或标准输入(stdin)数据转换成命令行参数,也能够从文件的输出中读取数据; xargs也可以给命令传递参数;…...

【广州华锐互动】数字孪生智慧楼宇3D可视化系统:掌握实时运行状态,优化运营管理
在过去的几年中,科技的发展极大地改变了我们的生活和工作方式。其中,三维数据可视化技术的出现,为我们提供了全新的理解和观察世界的方式。特别是在建筑行业,数字孪生智慧楼宇3D可视化系统的出现,让我们有机会重新定义…...

20230904工作心得:集合应该如何优雅判空?
1 集合判空 List<String> newlist null;//空指针if( !newlist.isEmpty()){newlist.forEach(System.out::println);}//空指针if(newlist.size()>0 && newlist!null){newlist.forEach(System.out::println);}//可行if(newlist!null && newlist.size()&…...

使用Python进行健身手表数据分析
健身手表(Fitness Watch)数据分析涉及分析健身可穿戴设备或智能手表收集的数据,以深入了解用户的健康和活动模式。这些设备可以跟踪所走的步数、消耗的能量、步行速度等指标。本文将带您完成使用Python进行Fitness Watch数据分析的任务。 Fitness Watch数据分析是健…...
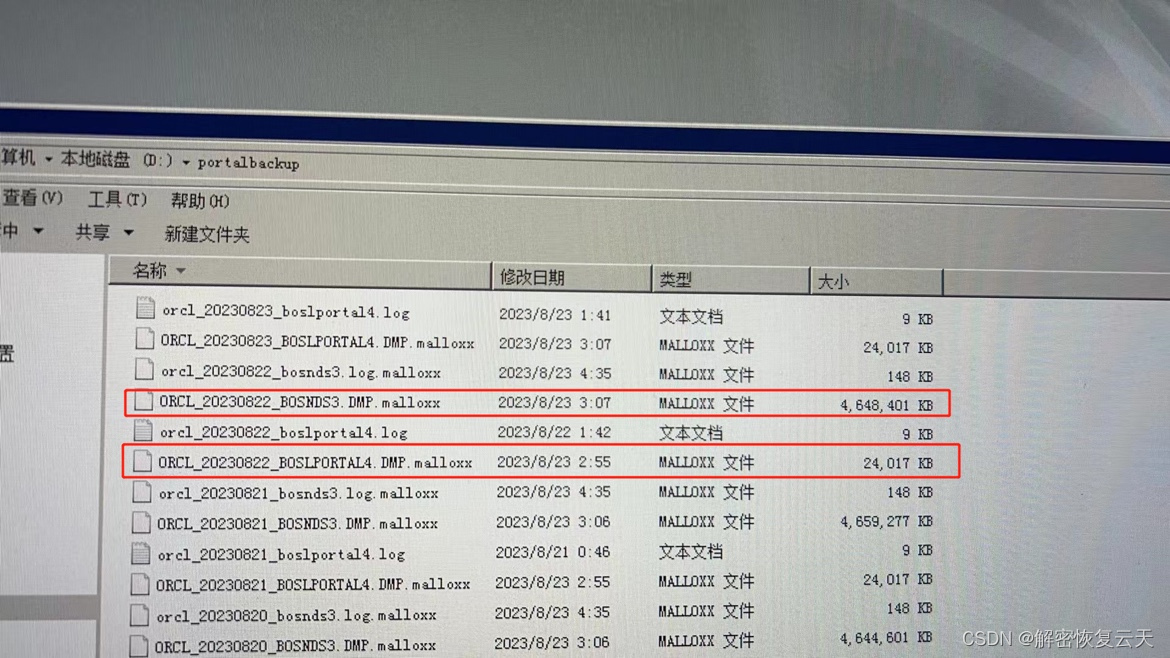
什么是malloxx勒索病毒,服务器中malloxx勒索病毒了怎么办?
Malloxx勒索病毒是一种新型的电脑病毒,它通过加密用户电脑中的重要文件数据来威胁用户,并以此勒索钱财。这种病毒并不是让用户的电脑瘫痪,而是以非常独特的方式进行攻击。在感染了Malloxx勒索病毒后,它会加密用户服务器中的数据&a…...
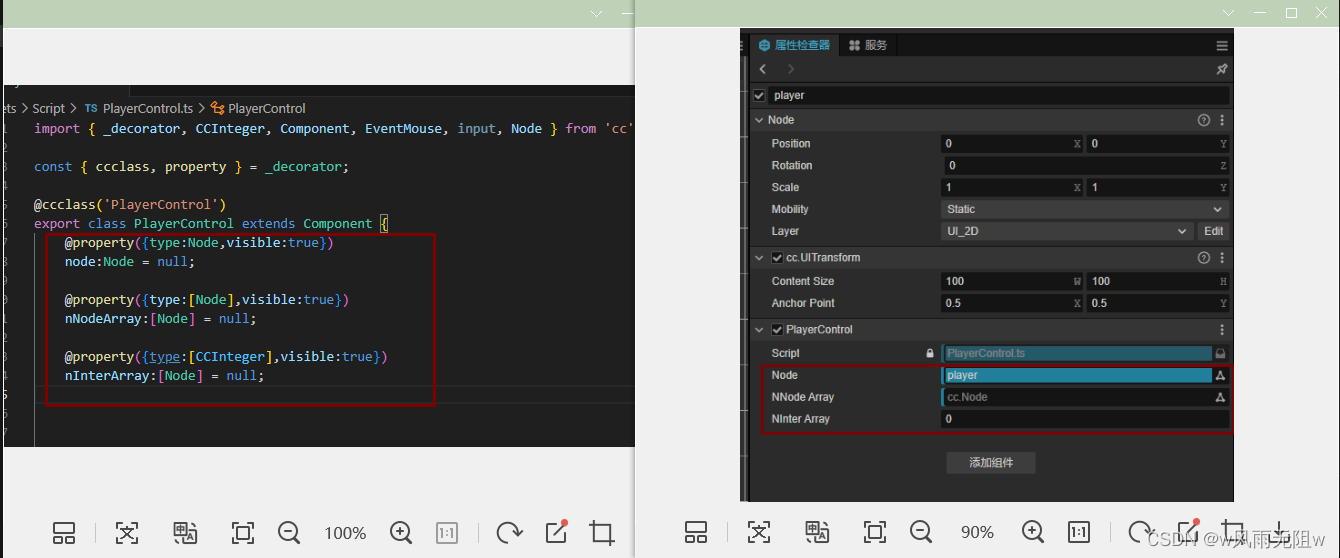
CocosCreator3.8研究笔记(六)CocosCreator 脚本装饰器的理解
一、什么是装饰器? 装饰器是TypeScript脚本语言中的概念。 TypeScript的解释:在一些场景下,我们需要额外的特性来支持标注或修改类及其成员。装饰器(Decorators)为我们在类的声明及成员上通过元编程语法添加标注提供了…...

docker login harbor http login登录
前言 搭建的 harbor 仓库为 http 协议,在本地登录时出现如下报错: docker login http://192.168.xx.xx Username: admin Password: Error response from daemon: Get "https://192.168.xx.xx/v2/": dialing 192.168.xx.xx:443 matches static …...
day5 qt
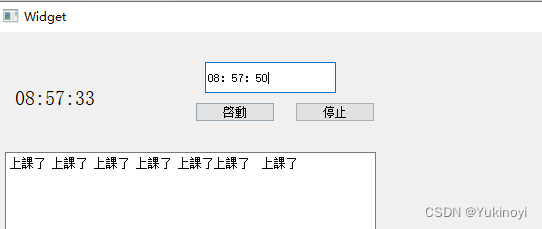
#include "widget.h" #include "ui_widget.h"Widget::Widget(QWidget *parent): QWidget(parent), ui(new Ui::Widget) {ui->setupUi(this);timer_idthis->startTimer(100);//啓動一個定時器 每100ms發送一次信號ui->Edit1->setPlaceholderTex…...
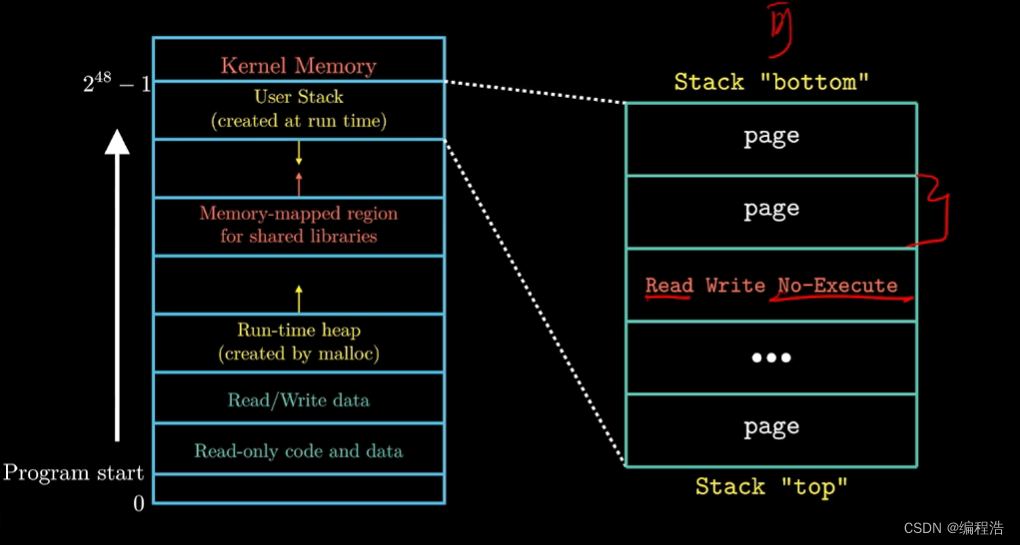
【80天学习完《深入理解计算机系统》】第十三天 3.7 缓冲区溢出 attack lab
3.7 缓冲区溢出 && attack lab...

Hadoop生态之hive
一 概述与特点 之所以把Hive放在Hadoop生态里面去写,是因为它本身依赖Hadoop。Hive是基于Hadoop的一个数据仓库工具,可以将结构化的数据文件映射为一张数据库表,并提供类 SQL 查询功能。 其本质是将 SQL 转换为 MapReduce/Spark 的任务进行运算,底层由 HDFS 来提供…...

SpringBoot源码企业公司ERP进销存管理系统JavaWeb项目前后端分离Vue实现方案
SpringBoot源码企业公司ERP进销存管理系统JavaWeb项目前后端分离Vue一、项目背景与目标SpringBoot源码企业公司ERP进销存管理系统JavaWeb项目前后端分离Vue随着企业信息化管理的需求日益增长,ERP(企业资源计划)系统成为企业提升管理效率、优化…...

OpenClaw 太难装了?试试 LangTARS:一行命令部署 + WebUI 管理面板,还能接入 Dify/Coze/nn??
1. 什么是 Apache SeaTunnel? Apache SeaTunnel 是一个非常易于使用、高性能、支持实时流式和离线批处理的海量数据集成平台。它的目标是解决常见的数据集成问题,如数据源多样性、同步场景复杂性以及资源消耗高的问题。 核心特性 丰富的数据源支持&#…...

嵌入式与单片机:核心概念与开发实战解析
1. 嵌入式与单片机:从概念到实战的全面解析作为一名在嵌入式领域摸爬滚打多年的工程师,我经常被问到这样一个问题:"单片机不就是嵌入式吗?"这个问题看似简单,却反映了初学者对这两个概念的普遍困惑。今天&am…...

OpenClaw技能组合拳:Qwen3.5-9B同时调度多个自动化模块
OpenClaw技能组合拳:Qwen3.5-9B同时调度多个自动化模块 1. 当办公自动化遇上混合专家模型 上周五下午,我正在手忙脚乱地处理堆积如山的邮件和会议安排时,突然意识到:这些重复性工作不正是AI最擅长的领域吗?于是决定用…...

Go - Zerolog使用入门
特点高性能:零分配设计,极高的写入速度,对 GC 几乎无压力。结构化日志:默认输出 JSON 格式,便于日志系统(如 ELK、Loki)解析和检索。支持 context:可以在请求链路中传递和追加日志字…...

2025届毕业生推荐的五大降AI率方案解析与推荐
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 人工智能写作工具,是借助自然语言处理以及深度学习技术制造的智能辅助系统&#…...

Matlab仿真研究:三机并联风光混合储能并网系统的建模与控制策略实现
Matlab仿真三机并联风光混合储能并网系统,风光储并网,微电网系统,光伏电池模型,永磁同步风机,电压电流控制,PQ控制 波形正确,结构完整有参考文献,详情见图片 三机并联风光混合储能并…...

基于Yolov5的钢轨表面缺陷检测:数据集与含训练好的模型
基于yolov5的钢轨表面缺陷检测 数据集含训练好的模型一、项目概述 本项目基于YOLOv5 7.0版本构建,专注于钢轨表面缺陷检测任务,提供了完整的模型训练、推理、导出及性能评估工具链。项目包含47个核心文件,涵盖数据加载、模型构建、训练优化、…...

集成学习完全指南:从AdaBoost到随机森林,揭秘为什么一群“弱鸡”能吊打“学霸”
在机器学习领域,单个模型的表现往往受限于其固有的偏差(Bias)和方差(Variance)问题——这就好比一位再厉害的学霸,也难免有自己的知识盲区。集成学习(Ensemble Learning)正是为解决这…...
,RAG优化新范式从入门到精通,收藏这一篇就够了!)
多LLM查询扩展框架实战指南(非常详细),RAG优化新范式从入门到精通,收藏这一篇就够了!
🎯 一句话总结:本文提出一套完全自动化的领域自适应查询扩展框架,无需人工编写Prompt或选择示例,通过BM25-MonoT5 pipeline构建领域内示例池,再用LLM精化多LLM扩展结果,显著提升检索性能。 📖 为…...