SLAM从入门到精通(ROS安装)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】
ROS科研上面用的多,实际生产其实用的也不少。它本身还是很好的应用框架。当然,它对于很多初学的同学来说还是很友好的。学完之后,可以直接port到嵌入式设备上面进行使用。只是,如果要把ROS真正部署到实际的项目中,有几个问题需要解决。
第一个问题,那就是学会添加功能补丁、修补bug。很多的开源包,或多或少有一点bug,这些代码当初只是为了科研使用,本身并没有考虑那么仔细。所以,要为了杜绝各种corner case失效的情况,就必须要对之前代码中没有考虑的情形加上patch补丁,这样系统才能稳定运行。
第二个问题,那就是性能优化和提高。之前所有的代码几乎都是由cpu完成的,而ROS服务的领域是机器人,这中间对于速率和性能其实是有要求的。所以简简单单port c++代码,有的时候效果并不好,所以这个时候就要修会使用硬件条件来加速。该升级cpu升级cpu,该转移到fpga计算转移到fpga,该使用gpu使用gpu,反正只要能提高实时性,大家可以根据自己的情况灵活进行处理。
第三个问题,添加新算法、新设备。ROS本身只是一个框架,不一定能包含所有的算法和设备驱动。所以这个时候,我们看到了新的paper,发现了更好的传感器设备,就要学会自己在ROS平台上开发算法和驱动设备。这样ROS不再是一个简简单单的科研平台,它还具有了生产属性,可以为我们实际生产环境所使用了。
今天我们就来看看,如何安装ROS。

1、安装ubuntu
ROS本身是建立在linux系统之上的,所以在此之前,我们需要先安装一个linux系统。这里,可以选择ubuntu 20.04 64位系统,用virtualbox进行安装。
有一点需要注意的就是,ROS涉及的软件和测试包比较多,所以空间最好大一点。省的后期出现空间不够的情况下。一般情况下认为,不能低于30G大小。
2、打开virtualbox的增强模式
在ubuntu虚拟机里面安装增强模式之后,虚拟机就可以全屏显示了。

3、打开virtualbox双向拷贝功能
打开了双向拷贝,不管是host往虚拟机拷贝字符,还是虚拟机往host拷贝字符,就都非常方便了。

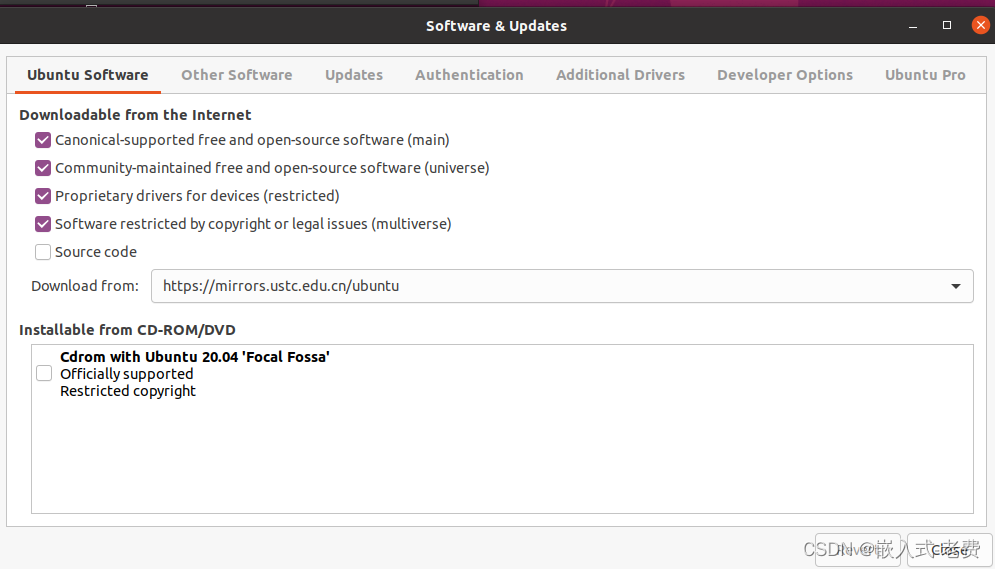
4、打开软件更新,将软件源设置成ustsc
换软件源,主要是为了ubuntu下面apt-get下载的速度可以更快。这样就不必要到ubuntu的官网去下载软件了。
5、添加ROS源和keys
之前的软件源是为了下载一般的软件,但是不一定有ROS软件。所以这里还需要添加ROS源和keys。首先,添加ROS源,
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
接着配置keys,
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
这个时候,没有什么问题的话,就可以update一下了,
sudo apt-get update6、安装ROS软件
每一个ubuntu都有一个匹配的ROS,而ubuntu 20.04匹配的版本就是noetic。所以我们直接安装noetic全家桶就可以了。安装的软件包比较多,一般会有1000多个,稍微等待下即可。
sudo apt-get install ros-noetic-desktop-full7、在启动脚本里面添加ROS环境设置
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
8、安装构建依赖项
有一部分开发可能涉及到python脚本的编写。所以这部分软件也需要安装下,
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential9、安装rosdepc并初始化
安装ROS系统第一次用的时候,一般需要rosdep设置下。但是rosdep执行的时候,通常会被hang注,这主要是因为相关的资源无法从国外下载。所以,这里可以通过rosdepc来替代,效果是一样的,
sudo apt-get install python3-pip
sudo pip3 install rosdepc
sudo rosdepc init
rosdepc update
10、启动熟悉的小乌龟程序
学过ROS的同学都知道,一般确认ROS有没有安装好,启动一下小乌龟程序就好了。第一步,启动roscore,
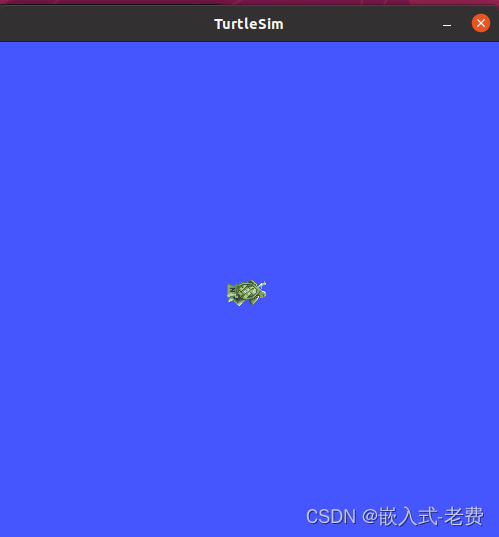
roscore第二步,打开含有小乌龟的界面,
rosrun turtlesim turtlesim_node完成这一步,如果没有什么问题的话,就会看到小乌龟的界面,
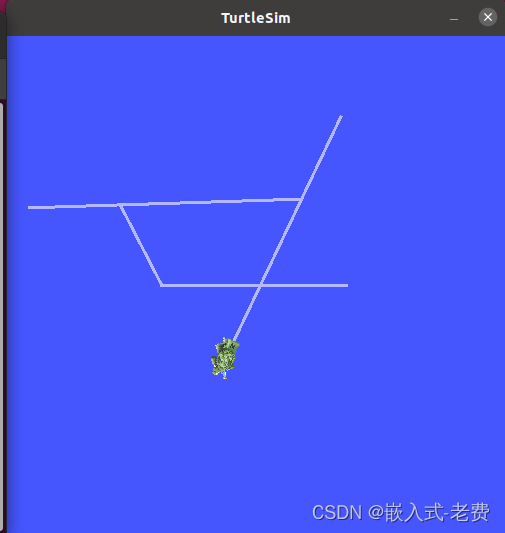
第三步,打开控制程序,
rosrun turtlesim turtle_teleop_key有了这三个程序,我们就可以让小乌龟动起来了。如果小乌龟没有问题,那代表ROS真的安装好了。
相关文章:
SLAM从入门到精通(ROS安装)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing 163.com】 ROS科研上面用的多,实际生产其实用的也不少。它本身还是很好的应用框架。当然,它对于很多初学的同学来说还是很友好的。学完…...
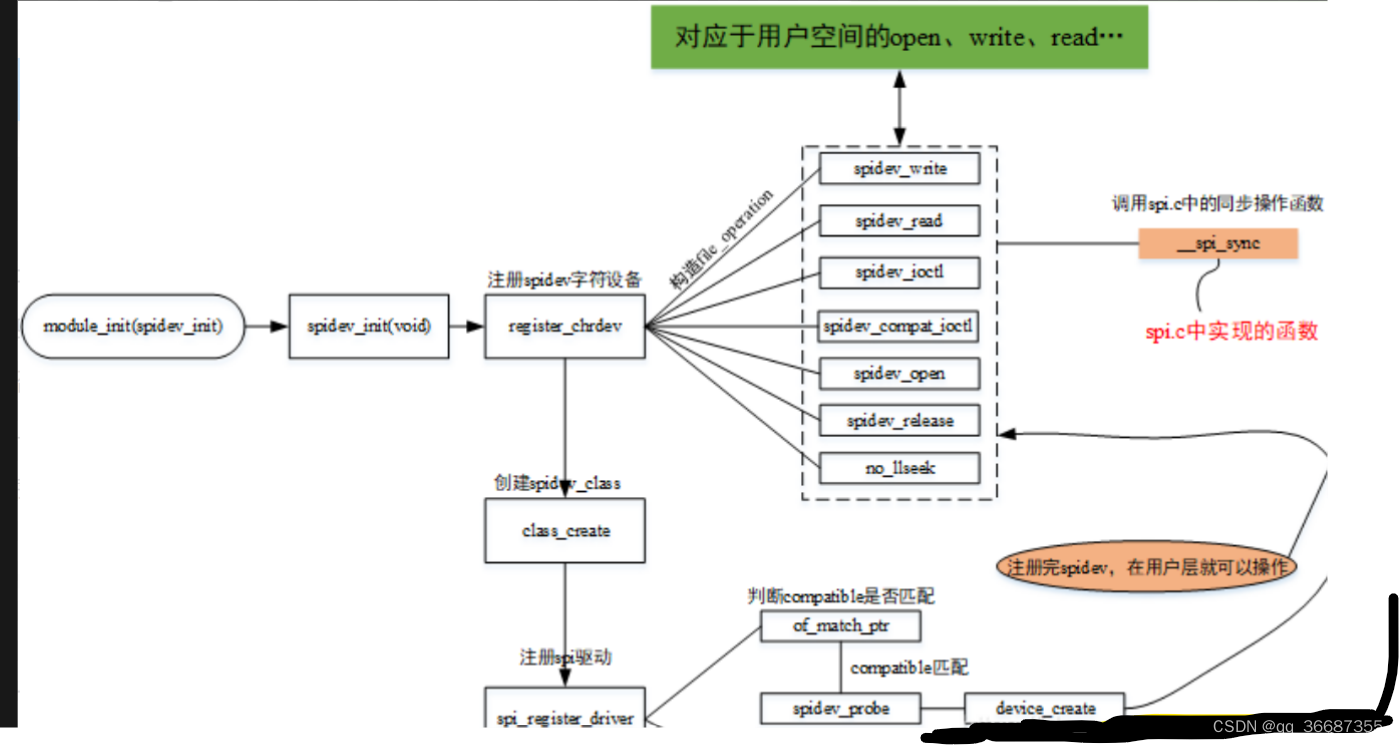
Linux 下spi设备驱动
参考: Linux kernel 有关 spi 设备树参数解析 Linux kernel 有关 spi 设备树参数解析 - 走看看 Linux SPI驱动框架(1)——核心层 Linux SPI驱动框架(1)——核心层_linux spi驱动模型_绍兴小贵宁的博客-CSDN博客 Linux SPI驱动框架(2)——控制器驱动层 Linux SPI驱…...

一:图形的位置和尺寸测量
绘制的基本要素: onDraw(Canvas):是用来重写的 Canvas:实际执行绘制的 Paint:调整粗细和颜色等 坐标系:以屏幕左上角为原点,向右、向下为正向数值的坐标系 尺寸单位:在绘制过程中所有的尺寸单位都是px…...
rtthread下基于spi device架构MCP25625驱动
1.CAN驱动架构 由于采用了RTT的spi device架构,不能再随心所遇的编写CAN驱动 了,之前内核虽然采用了RTT内核,但是驱动并没有严格严格按RTT推荐的架构来做,这次不同了,上次是因为4个MCP25625挂在了4路独立的SPI总线上&…...
)
Open3D 点云投影到圆柱(python详细过程版)
目录 一、算法原理1、圆柱方程2、投影原理二、代码实现三、结果展示1、原始点云2、投影结果四、参考链接一、算法原理 1、圆柱方程 圆柱方程可以表示为: ( x − x...
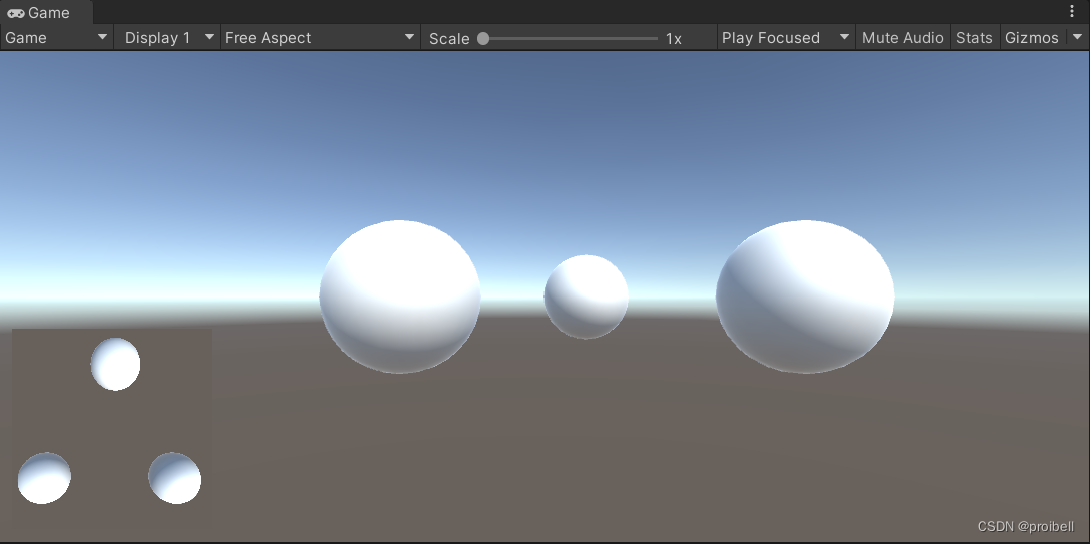
Unity实战(10):如何将某个相机的画面做成贴图(RenderTexture)
目录 前言 一、创建物体、材质与相机 二、将RenderTexture赋给材质 2.1 修改rt1的一些属性 2.2 将rtMat1材质的shader改为Unlit/Texture,并将rt1赋给这个材质 三、效果呈现 前言 本文记录如何将某个相机的画面做成贴图,即游戏某些场景中小地图做法…...

STL- 函数对象
1 函数对象 1.1 函数对象概念 概念: 重载函数调用操作符的类,其对象常称为函数对象函数对象使用重载的()时,行为类似函数调用,也叫仿函数 本质: 函数对象(仿函数)是一个类,不是一个函数 1.2 函数对象…...
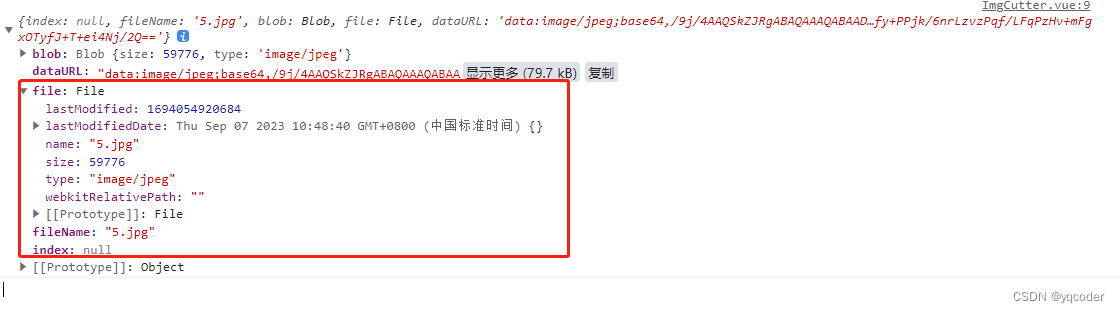
前端 JS 经典:上传文件
重点:multipart/form-data 后端识别上传类型必填 1. form 表单上传 <!-- enctype"multipart/form-data" 这个必填 --> <form action"http://127.0.0.1:8080/users/avatar" method"post" enctype"multipart/form-data…...

数据分析面试
数据分析相关的职位面试可以拆解为以下三块: 1)技术基础 2)项目经验提问 3)业务问题 【数据分析与挖掘(二)】面试题汇总(附答案)_数据分析面试常见问题及答案_youthlost的博客-CSDN博客 我裸辞去面试p…...

Open3D(C++) 整体最小二乘拟合平面
目录 一、算法原理1、算法过程2、参考文献二、代码实现三、结果展示本文由CSDN点云侠原创,原文链接。 一、算法原理 1、算法过程 最小二乘拟合平面认为点云数据系数矩阵不存在误差,然而由于观测条件的限制,观测向量、系数矩阵都有可能存在误差,那么最小二乘方法就不再是最…...

【android12-linux-5.1】【ST芯片】【RK3588】【LSM6DSR】HAL源码分析
一、环境介绍 RK3588主板搭载Android12操作系统,内核是Linux5.10,使用ST的六轴传感器LSM6DSR芯片。 二、芯片介绍 LSM6DSR是一款加速度和角速度(陀螺仪)六轴传感器,还内置了一个温度传感器。该芯片可以选择I2C,SPI通讯,还有可编程终端,可以后置摄像头等设备,功能是很…...

MT8788安卓核心板详细参数_MTK安卓主板开发板智能通讯模块
MT8788安卓核心板集成了一个高效的12nm SoC,内置4G LTE调制解调器,将强大的硬件与到处可连接的全面功能设计相结合。 MTK8788智能终端具备许多功能,包括4G、2.4G/5G双频WiFi、蓝牙4.2BLE、2.5W功放、USB、mipi屏接口、三路摄像头接口、GPS和…...

C++String模拟实现
实际上string没什么可讲,主要是对string函数的运用与理解,与其写库函数如何用,不如直接去看c库函数来得好。 以下是自己实现string功能函数。但没对string库中的全部函数进行实现,而是实现主要使用的。 .cpp内是用来测试函数功能…...

Java 设置免登录请求接口被拦截问题
1、在设置免登录时,前端将请求的路由添加到白名单后,请求接口还是被拦截到了,将请求接口也设置后还是会被拦截跳转到登录页面 通过JAVA 注解 Anonymous 进行设置匿名访问就可以了...

(其他) 剑指 Offer 67. 把字符串转换成整数 ——【Leetcode每日一题】
❓ 剑指 Offer 67. 把字符串转换成整数 难度:中等 写一个函数 StrToInt,实现把字符串转换成整数这个功能。不能使用 atoi 或者其他类似的库函数。 首先,该函数会根据需要丢弃无用的开头空格字符,直到寻找到第一个非空格的字符为…...

【MySQL】一文详解MySQL,从基础概念到调优
作者简介 前言 博主之前写过一个MySQL的系列,从基础概念、SQL到底层原理、优化,专栏地址: https://blog.csdn.net/joker_zjn/category_12305262.html?spm1001.2014.3001.5482 本文会是这个系列的清单,拉通来聊一聊Mysql从基础概…...
机器学习——boosting之提升树
提升树和adaboost基本流程是相似的 我看到提升树的时候,懵了 这…跟adaboost有啥区别??? 直到看到有个up主说了,我才稍微懂 相当于,我在adaboost里的弱分类器,换成CART决策树就好了呗࿱…...

解决Spring Boot启动错误的技术指南
🌷🍁 博主猫头虎(🐅🐾)带您 Go to New World✨🍁 🦄 博客首页——🐅🐾猫头虎的博客🎐 🐳 《面试题大全专栏》 🦕 文章图文…...

使用Spring Security保障你的Web应用安全
🌷🍁 博主猫头虎(🐅🐾)带您 Go to New World✨🍁 🦄 博客首页——🐅🐾猫头虎的博客🎐 🐳 《面试题大全专栏》 🦕 文章图文…...
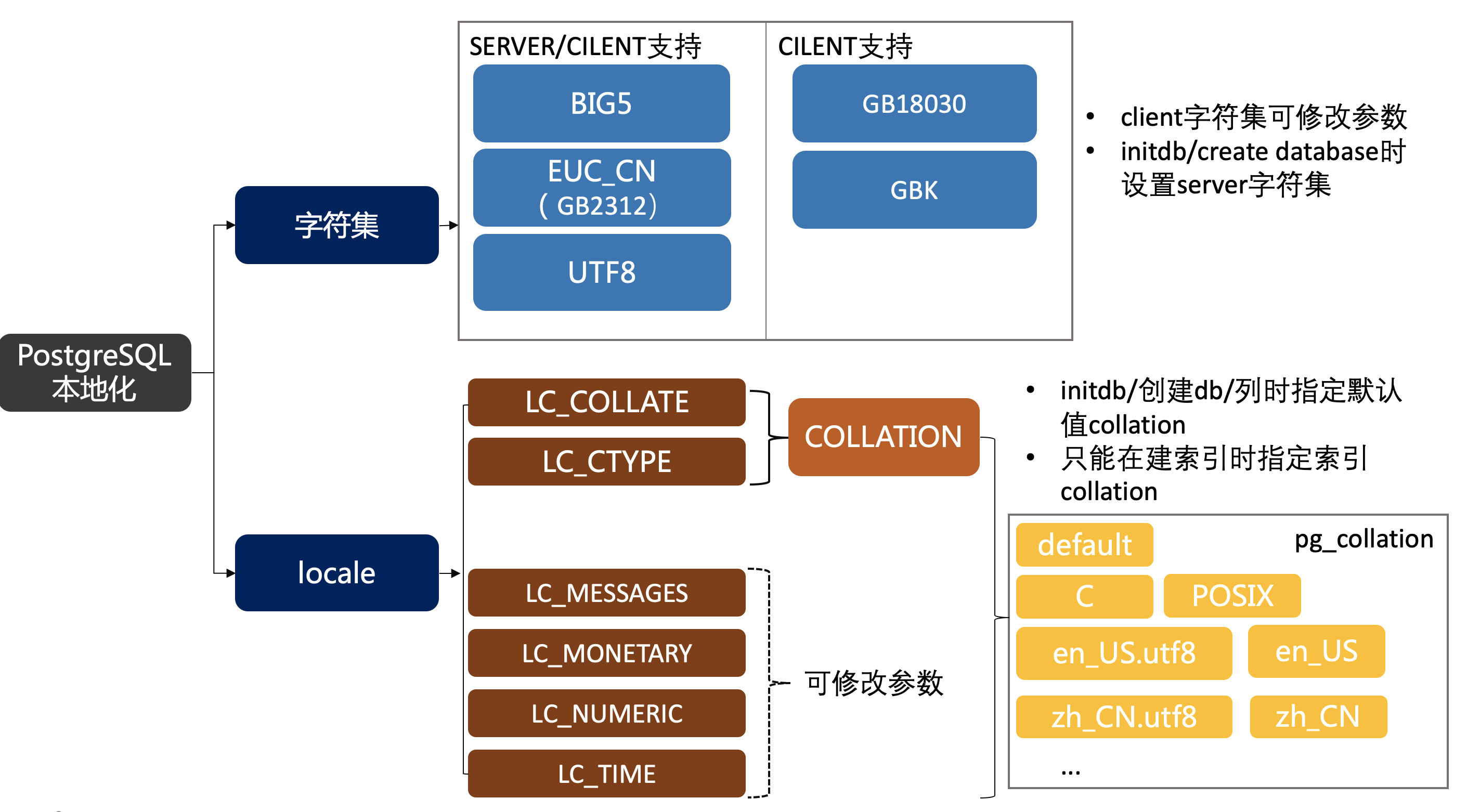
PostgreSQL本地化
本地化的概念 本地化的目的是支持不同国家、地区的语言特性、规则。比如拥有本地化支持后,可以使用支持汉语、法语、日语等等的字符集。除了字符集以外,还有字符排序规则和其他语言相关规则的支持,例如我们知道(‘a’,‘b’)该如何排序&…...

利用Taotoken的API兼容性将现有基于OpenAI的应用快速迁移上线
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 利用Taotoken的API兼容性将现有基于OpenAI的应用快速迁移上线 对于已经投入开发并依赖OpenAI官方API的应用,切换到新的…...

Chrome QRCode:浏览器原生二维码生成与解析的极简技术方案
Chrome QRCode:浏览器原生二维码生成与解析的极简技术方案 【免费下载链接】chrome-qrcode :zap: A Chrome plugin to Genrate QRCode of URL / Text, or Decode the QRcode in website. 一个Chrome浏览器插件,用于生成当前URL或者选中内容的二维码&…...

原神模型导入终极指南:GIMI深度定制框架完全解析
原神模型导入终极指南:GIMI深度定制框架完全解析 【免费下载链接】GI-Model-Importer Tools and instructions for importing custom models into a certain anime game 项目地址: https://gitcode.com/gh_mirrors/gi/GI-Model-Importer 原神模型导入&#x…...

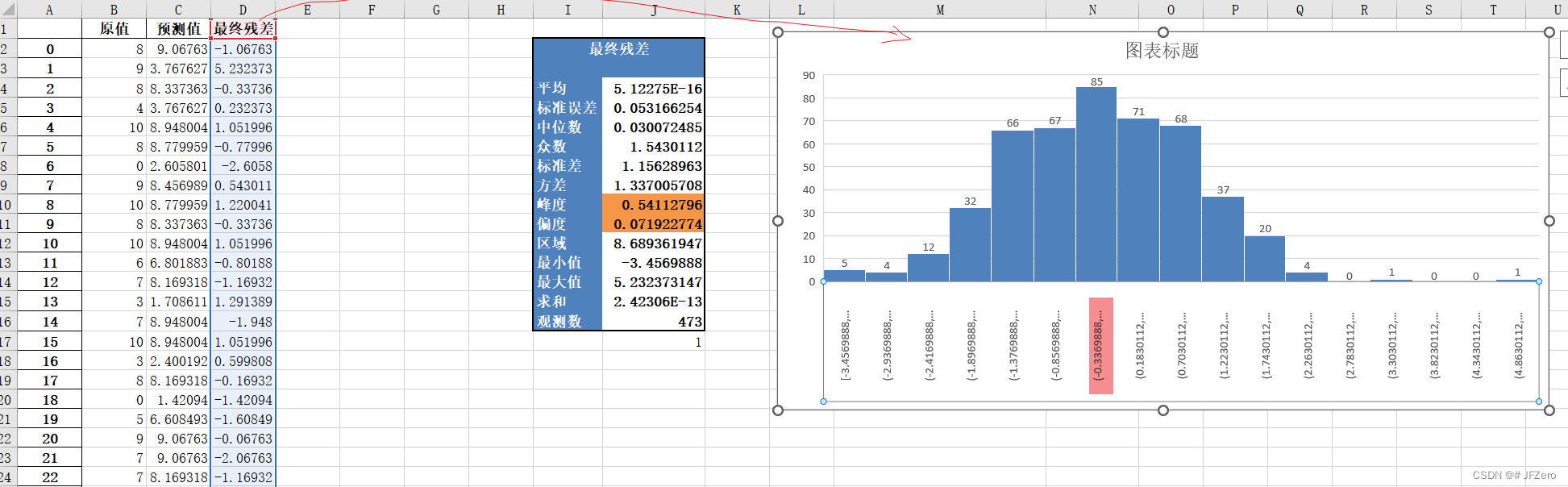
普遍认为赠送福利越多客户留存越高,编程统计福利投入,客户留存数据过度福利,会造成客户贪婪流失率上升。
“福利投入强度与客户留存的非线性关系分析” 为主题。一、实际应用场景描述(Business Context)在 SaaS、电商、会员制平台、在线教育等商业场景中,赠送福利(优惠券、积分、试用权益、赠品等)被广泛用于:- …...

传统认为越早进入行业越占优势,编程统计入行时间,行业红利数据,行业成熟期入行风险更低收益更稳。
“入行时间与行业红利期的匹配关系分析” 为主题,给出一套工程化、可教学、可复现的分析示例。一、实际应用场景描述(Business Context)在职业规划、行业研究与人才策略中,普遍存在一种观点:“越早进入一个行业&#x…...

惠来海康医院眼科母亲节:愿岁月温柔,护她眼底有光
惠来海康医院眼科母亲节:愿岁月温柔,护她眼底有光五月浅夏,暖意氤氲,当康乃馨的芬芳漫过街巷,母亲节便载着满心敬意如期而至。母亲,是岁月里最温柔的守望者,用一双眼眸,藏下对我们所…...

Taotoken模型广场如何帮助开发者快速选型,对比主流模型特性
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken模型广场如何帮助开发者快速选型,对比主流模型特性 对于需要接入大模型能力的开发者而言,面对市场…...

iOSDeviceSupport终极指南:如何快速解决Xcode设备支持文件缺失问题
iOSDeviceSupport终极指南:如何快速解决Xcode设备支持文件缺失问题 【免费下载链接】iOSDeviceSupport All versions of iOS Device Support 项目地址: https://gitcode.com/gh_mirrors/ios/iOSDeviceSupport 你是否曾经在iOS开发中遇到过这样的困扰…...

Docker Desktop 快速搭建本地 Kubernetes 集群:解决镜像拉取与生态集成
1. 项目概述:在本地桌面环境快速搭建K8s生态 如果你是一名开发者或者运维工程师,想在自己的Mac或Windows电脑上快速体验和学习Kubernetes(K8s)及其周边生态,比如Istio服务网格、Helm包管理器,那么Docker D…...

如何快速配置Windows端口转发:终极图形化管理工具指南
如何快速配置Windows端口转发:终极图形化管理工具指南 【免费下载链接】PortProxyGUI A manager of netsh interface portproxy which is to evaluate TCP/IP port redirect on windows. 项目地址: https://gitcode.com/gh_mirrors/po/PortProxyGUI PortProx…...