20.04部署cartographer
部署cartographer
sudo apt-get update
sudo apt-get install -y python3-wstool python3-rosdep ninja-build stow
下载cartographer新建了一个ws
mkdir carto_ws
cd carto_ws
wstool init src
wstool merge -t src https://raw.githubusercontent.com/cartographer-project/cartographer_ros/master/cartographer_ros.rosinstall
wstool update -t src
安装依赖
如果安装ROS的时候执行过’sudo rosdep init’,那么这里会报错,报错可以忽略
sudo rosdep init
rosdep update
rosdep install --from-paths src --ignore-src --rosdistro=${ROS_DISTRO} -y
安装abseil-cpp library
src/cartographer/scripts/install_abseil.sh
编译并安装
catkin_make_isolated --install --use-ninja
#运行2d包
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_2d/cartographer_paper_deutsches_museum.bag
source install_isolated/setup.bash
roslaunch cartographer_ros demo_backpack_2d.launch bag_filename:=${HOME}/Downloads/cartographer_paper_deutsches_museum.bag
使用自己的激光雷达数据
修改revo_lds.lua
gedit carto_ws/src/cartographer_ros/cartographer_ros/configuration_files/revo_lds.lua
下面是修改的代码
-- Copyright 2016 The Cartographer Authors
--
-- Licensed under the Apache License, Version 2.0 (the "License");
-- you may not use this file except in compliance with the License.
-- You may obtain a copy of the License at
--
-- http://www.apache.org/licenses/LICENSE-2.0
--
-- Unless required by applicable law or agreed to in writing, software
-- distributed under the License is distributed on an "AS IS" BASIS,
-- WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
-- See the License for the specific language governing permissions and
-- limitations under the License.include "map_builder.lua"
include "trajectory_builder.lua"options = {map_builder = MAP_BUILDER,trajectory_builder = TRAJECTORY_BUILDER,map_frame = "map",tracking_frame = "laser",published_frame = "laser",odom_frame = "odom",provide_odom_frame = true,publish_frame_projected_to_2d = false,use_pose_extrapolator = on,use_pose_extrapolator = true,use_odometry = false,use_nav_sat = false,use_landmarks = false,num_laser_scans = 1,num_multi_echo_laser_scans = 0,num_subdivisions_per_laser_scan = 1,num_point_clouds = 0,lookup_transform_timeout_sec = 0.2,submap_publish_period_sec = 0.3,pose_publish_period_sec = 5e-3,trajectory_publish_period_sec = 30e-3,rangefinder_sampling_ratio = 1.,odometry_sampling_ratio = 1.,fixed_frame_pose_sampling_ratio = 1.,imu_sampling_ratio = 1.,landmarks_sampling_ratio = 1.,
}MAP_BUILDER.use_trajectory_builder_2d = trueTRAJECTORY_BUILDER_2D.submaps.num_range_data = 35
TRAJECTORY_BUILDER_2D.min_range = 0.3
TRAJECTORY_BUILDER_2D.max_range = 8.
TRAJECTORY_BUILDER_2D.missing_data_ray_length = 1.
TRAJECTORY_BUILDER_2D.use_imu_data = false
TRAJECTORY_BUILDER_2D.use_online_correlative_scan_matching = true
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.linear_search_window = 0.1
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.translation_delta_cost_weight = 10.
TRAJECTORY_BUILDER_2D.real_time_correlative_scan_matcher.rotation_delta_cost_weight = 1e-1POSE_GRAPH.optimization_problem.huber_scale = 1e2
POSE_GRAPH.optimize_every_n_nodes = 35
POSE_GRAPH.constraint_builder.min_score = 0.65return options
修改demo_revo_lds.launch
gedit carto_ws/src/cartographer_ros/cartographer_ros/launch/demo_revo_lds.launch
修改
<!--Copyright 2016 The Cartographer AuthorsLicensed under the Apache License, Version 2.0 (the "License");you may not use this file except in compliance with the License.You may obtain a copy of the License athttp://www.apache.org/licenses/LICENSE-2.0Unless required by applicable law or agreed to in writing, softwaredistributed under the License is distributed on an "AS IS" BASIS,WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.See the License for the specific language governing permissions andlimitations under the License.
--><launch><param name="/use_sim_time" value="true" /><node name="cartographer_node" pkg="cartographer_ros"type="cartographer_node" args="-configuration_directory $(find cartographer_ros)/configuration_files-configuration_basename revo_lds.lua"output="screen"><remap from="scan" to="scan" /></node><node name="cartographer_occupancy_grid_node" pkg="cartographer_ros"type="cartographer_occupancy_grid_node" args="-resolution 0.05" /><node name="rviz" pkg="rviz" type="rviz" required="true"args="-d $(find cartographer_ros)/configuration_files/demo_2d.rviz" /></launch>
再次编译,要删除之前编译的文件
cd carto_ws
catkin_make_isolated --install --use-ninja
写入.bashrc中
source /home/xinghai/ROS/SLAMTEC/cartographer_ros/devel_isolated/setup.bash
运行代码
sudo chmod 666 /dev/ttyUSB0
roslaunch rplidar_ros rplidar_a3.launch
roslaunch cartographer_ros demo_revo_lds.launch
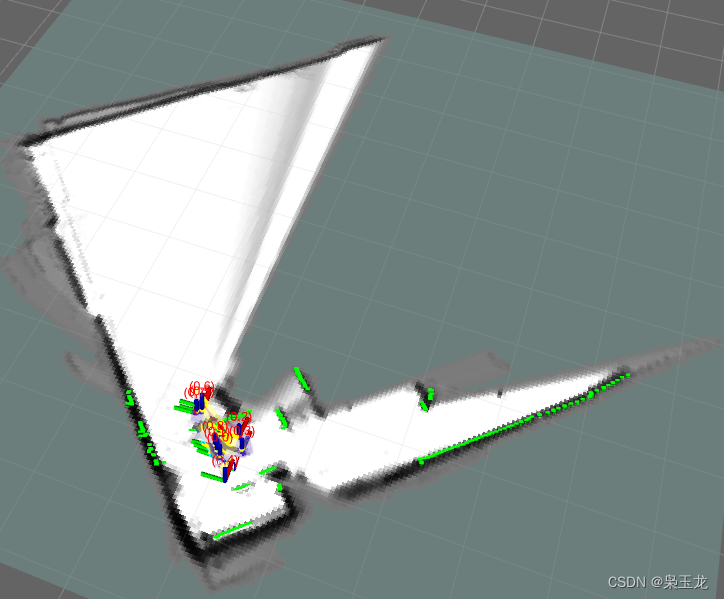
保存地图
cartographer建立完地图后,无法用map_server保存地图,
cartographer保存地图方式:
1 完成轨迹,不再接受数据
rosservice call /finish_trajectory 0 //结束路径0 的建图2 序列化保存当前状态
rosservice call /write_state "{filename: '${HOME}/Downloads/mymap2.pbstream'}"
3 将pbstream转化为pgm和yaml文件
rosrun cartographer_ros cartographer_pbstream_to_ros_map -map_filestem=/home/xinghai/Downloads/mymap3map -pbstream_filename=/home/xinghai/Downloads/mymap3.pbstream -resolution=0.05解释
rosrun cartographer_ros cartographer_pbstream_to_ros_map -map_filestem=<绝对路径>/<地图名字> -pbstream_filename=<绝对路径>/<.pbstream名字> -resolution=0.05
相关文章:
20.04部署cartographer
部署cartographer sudo apt-get update sudo apt-get install -y python3-wstool python3-rosdep ninja-build stow下载cartographer新建了一个ws mkdir carto_ws cd carto_ws wstool init src wstool merge -t src https://raw.githubusercontent.com/cartographer-project/…...
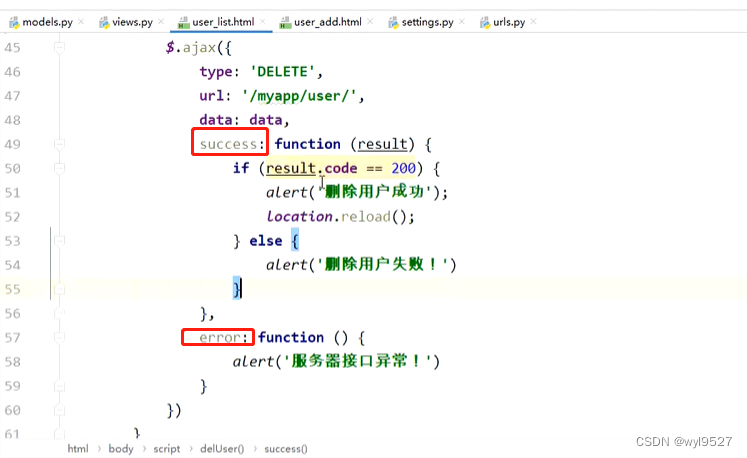
djangoMTV初探
1.restful请求方式 一个视图对应多个操作(增删改查) 老的方式 views.py from django.shortcuts import render from django.http import HttpResponse,request,QueryDict, JsonResponse from myapp.models import User from django.views.generi…...

Minecraft--基于云服务器搭建自己的服务器--简易搭建
阿丹: 上一个项目结束了。但是看着自己的服务器想着能不能做点啥子吧。想到了之前和兄弟们玩的麦块。好久没和兄弟们一起玩耍了。怀念之前一起连一个wifi玩我的世界的时候是真快乐。于是尝试自己动手搭建一个我的世界服务器,邀请兄弟们重温一下快乐。 提…...

【数据结构与算法】十大经典排序算法
文章目录 前言一、常见十大排序算法总结1、名词解释2、时间复杂度 二、排序算法与C语言实现1、冒泡排序2、选择排序3、插入排序4、希尔排序5、归并排序6、快速排序7、堆排序8、计数排序9、桶排序10、基数排序 总结 前言 排序算法是《数据结构与算法》中最基本的算法之一。 排序…...

Android 12.0 SystemUI下拉状态栏定制化之隐藏下拉通知栏布局功能实现(一)
1.前言 在12.0的系统定制化开发中,由于从12.0开始SystemUI下拉状态栏和11.0的变化比较大,所以可以说需要从新分析相关的SystemUI的 布局,然后做分析来实现不同的功能,今天就开始实现关于隐藏SystemUI下拉状态栏中的通知栏布局系列一 如图: 2.SystemUI下拉状态栏定制化之…...

665. 非递减数列-先改后验法
665. 非递减数列 给你一个长度为 n 的整数数组 nums ,请你判断在 最多 改变 1 个元素的情况下,该数组能否变成一个非递减数列。 我们是这样定义一个非递减数列的: 对于数组中任意的 i (0 < i < n-2),总满足 nums[i] < …...

调教 文心一言 生成 AI绘画 提示词(Midjourney)
文章目录 第一步第二步第三步第四步第五步第六步第七步第八步 文心一言支持连续对话 我瞎玩的非专业哈哈 第一步 你好,今天我们要用扩散模型创建图像。我会给你提供一些信息。行吗? 第二步 这是Midjourney的工作原理:Midjourney是另一个基于ai的工具,能…...
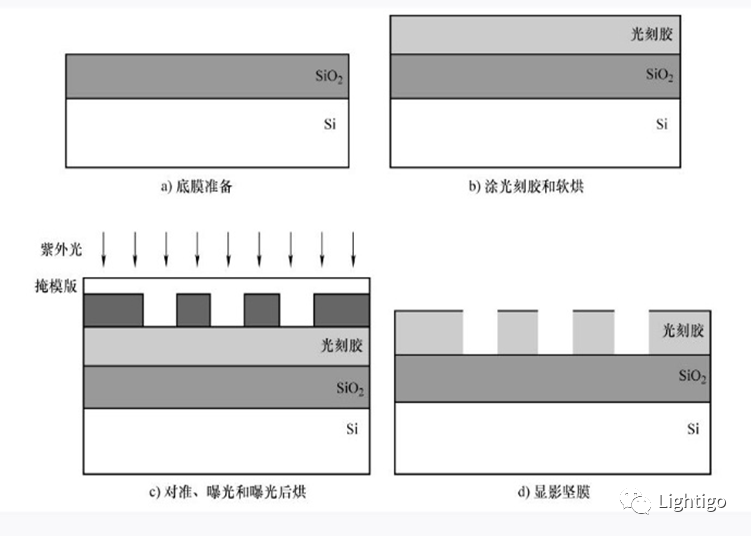
半导体制造工艺(一)光刻
在这里开个新专题,主要详细描述半导体制造整个流程中所用到的设备工艺步骤。 在集成电路制造工艺中,光刻是决定集成器件集成度的核心工序,该工序的作用是将图形信息从掩模版(也称掩膜版)上保真传输、转印到半导体材料衬…...

【海思SS626 | 开发环境】VMware17安装Ubuntu 18.04.6
目录 一、下载 Ubuntu 18.04.6 LTS二、VMware17创建虚拟机三、安装Ubuntu18.04LTS四、安装其他软件五、总结 一、下载 Ubuntu 18.04.6 LTS 问题:为什么要下载 Ubuntu18.04.6 LTS 而不是使用最新的,或者其他Linux发行版? 答:在ss6…...
每天10个小知识点)
Vue知识系列(3)每天10个小知识点
目录 系列文章目录Vue知识系列(1)每天10个小知识点Vue知识系列(2)每天10个小知识点 知识点**21. Vue不同生命周期**的概念、作用、原理、特性、优点、缺点、区别、使用场景**22. Vue 子组件和父组件执行顺序****23. created 和 mo…...

Java基础入门·多线程·线程池ThreadPool篇
前言 特点分析 线程池ThreadPool 销毁线程池 Executor类 Callable接口 线程池使用 …...

Trinitycore学习之在vscode查看远端服务器上源码配置
1:安装vscode,去官网下载,这里下载windows版本安装包 .zip https://code.visualstudio.com/Download 2:安装后,安装扩展chinese,使用中文设置,需要重启vscode。 3:安装ssh相关插件…...

583. 两个字符串的删除操作 -- 动规
583. 两个字符串的删除操作 class MinDistance:"""583. 两个字符串的删除操作https://leetcode.cn/problems/delete-operation-for-two-strings/description/"""def solution(self, text1: str, text2: str) -> int:"""这道题…...
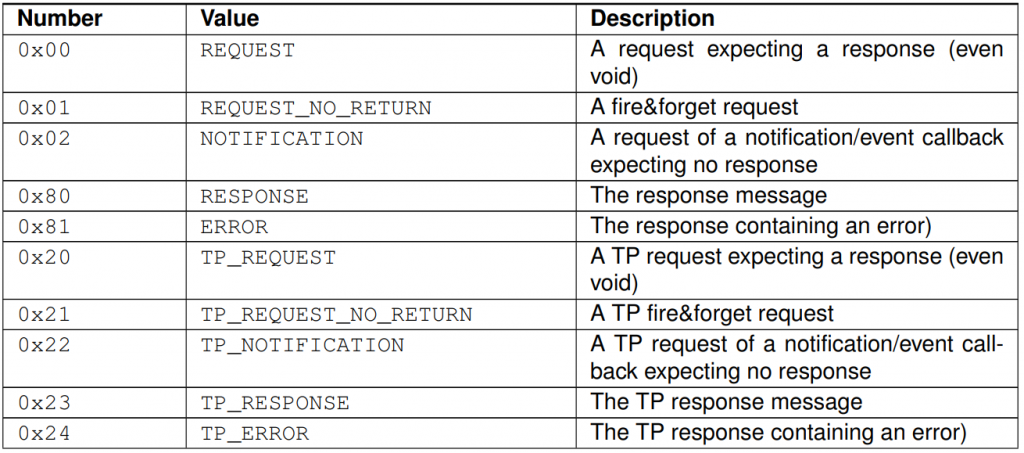
SOME/IP
介绍 SOME/IP是一种汽车中间件解决方案,可用于控制消息。它从一开始就被设计为完美地适应不同尺寸和不同操作系统的设备。这包括小型设备,如相机、AUTOSAR 设备,以及头戴设备或远程通信设备。它还确保SOME/IP支持信息娱乐域以及车辆中其他域…...

[2023.09.12]: Yew应用开发的第一个hook--use_state
Yew的SSR模式推荐使用function_component组件,并且在function_component中使用hooks。其中,我使用到的第一个hook是use_state。use_state的设计意图与React中的useState非常相似,都是为了保存并修改当前的状态。然而,由于Yew是用R…...

使用Langchain+GPT+向量数据库chromadb 来创建文档对话机器人
使用LangchainGPT向量数据库chromadb 来创建文档对话机器人 一.效果图如下: 二.安装包 pip install langchainpip install chromadbpip install unstructuredpip install jieba三.代码如下 #!/usr/bin/python # -*- coding: UTF-8 -*-import os # 导入os模块&…...
系列教程(一) 服务注册与发现(eureka))
Spring Cloud(Finchley版本)系列教程(一) 服务注册与发现(eureka)
Spring Cloud(Finchley版本)系列教程(一) 服务注册与发现(eureka) 为了更好的浏览体验,欢迎光顾勤奋的凯尔森同学个人博客http://www.huerpu.cc:7000 如有错误恳请大家批评指正,与大家共同学习、一起成长,万分感谢。 一、构建环境 Spring Cloud的构建工具可以使用Maven或Gr…...

【大数据】美团 DB 数据同步到数据仓库的架构与实践
美团 DB 数据同步到数据仓库的架构与实践 1.背景2.整体架构3.Binlog 实时采集4.离线还原 MySQL 数据5.Kafka2Hive6.对 Camus 的二次开发7.Checkdone 的检测逻辑8.Merge9.Merge 流程举例10.实践一:分库分表的支持11.实践二:删除事件的支持12.总结与展望 1…...
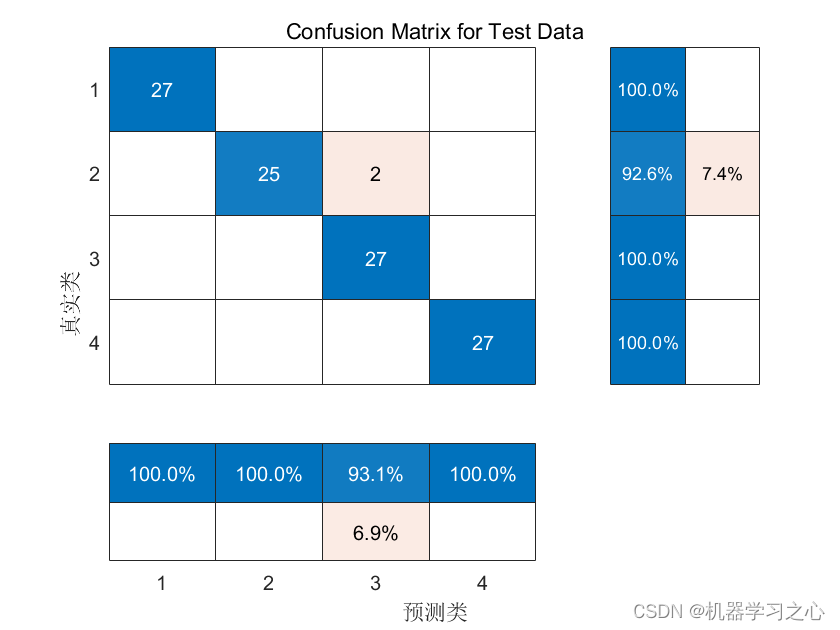
分类预测 | MATLAB实现WOA-CNN-BiGRU鲸鱼算法优化卷积双向门控循环单元数据分类预测
分类预测 | MATLAB实现WOA-CNN-BiGRU鲸鱼算法优化卷积双向门控循环单元数据分类预测 目录 分类预测 | MATLAB实现WOA-CNN-BiGRU鲸鱼算法优化卷积双向门控循环单元数据分类预测分类效果基本描述模型描述程序设计参考资料 分类效果 基本描述 1.Matlab实现WOA-CNN-BiGRU多特征分类…...
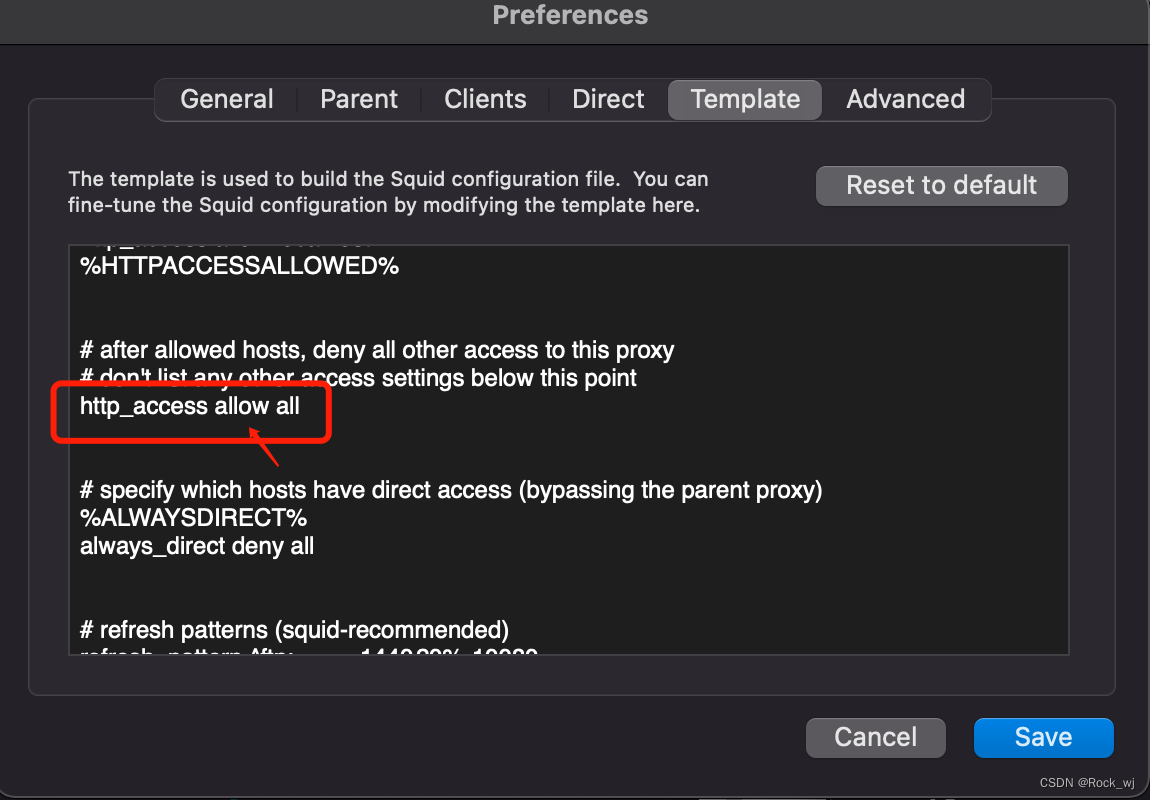
mac使用squidMan设置代理服务器
1,下载squidMan http://squidman.net/squidman/ 2, 配置SquidMan->Preference 3, mac命令窗口配置 export http_proxy export https_porxy 4,客户端配置(centos虚拟机) export http_proxyhttp://服务器ip:8080 export https…...

Taotoken按Token计费模式如何适应项目不同开发阶段
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken按Token计费模式如何适应项目不同开发阶段 在项目开发的生命周期中,从最初的创意验证到最终的大规模部署&…...

如何快速配置Atmosphere破解系统:Switch游戏体验全面升级指南
如何快速配置Atmosphere破解系统:Switch游戏体验全面升级指南 【免费下载链接】Atmosphere-stable 大气层整合包系统稳定版 项目地址: https://gitcode.com/gh_mirrors/at/Atmosphere-stable 想要让你的Nintendo Switch游戏加载速度提升65%,帧率翻…...

终极免费方案:5分钟解锁Windows多用户远程桌面完整指南
终极免费方案:5分钟解锁Windows多用户远程桌面完整指南 【免费下载链接】rdpwrap RDP Wrapper Library 项目地址: https://gitcode.com/gh_mirrors/rd/rdpwrap 还在为Windows家庭版限制远程桌面连接而烦恼吗?RDP Wrapper Library为您提供完美的解…...

Burp Suite MFA插件开发实战:状态机驱动的多因素认证自动化
1. 这不是“加个验证码”那么简单:为什么MFA插件开发是Burp生态里最被低估的硬功夫你肯定见过这样的场景:测试一个银行后台,登录流程走完用户名密码后,弹出Google Authenticator六位码;再点一下,又跳转到短…...

百度网盘直链解析技术实现与高速下载架构设计
百度网盘直链解析技术实现与高速下载架构设计 【免费下载链接】baidu-wangpan-parse 获取百度网盘分享文件的下载地址 项目地址: https://gitcode.com/gh_mirrors/ba/baidu-wangpan-parse 在云存储服务日益普及的今天,百度网盘作为国内用户量最大的云存储平台…...

非参数贝叶斯聚类与核主成分分析:从原理到工程实践
1. 项目概述:从数据分组到降维的工程实践在数据科学和机器学习的日常工作中,我们常常面临两大核心挑战:一是如何从一堆看似杂乱无章的数据点中,发现其内在的、有意义的组别结构;二是当数据维度高到令人眼花缭乱时&…...

[智能体-29]:curl 命令完整详解
全称:Client URL,客户端 URL 请求工具跨系统内置命令行 HTTP 工具,无额外安装,用于网络请求、接口调试、数据收发。一、核心作用等价命令行版 requests,可访问网页、调用 API、下载文件、测试服务连通性,调…...

KNO标度律与粒子多重数:从QCD喷注结构到夸克-胶子鉴别的理论推导
1. 项目概述:从粒子计数到喷注身份鉴别 在粒子物理实验里,我们经常面对一个看似简单却极其棘手的问题:眼前这个由上百个粒子组成的“喷注”(Jet),最初到底是从一个夸克还是从一个胶子产生的?这…...

报错注入原理与实战:从数据库错误回显到文件读写
1. 这不是“绕过WAF”的捷径,而是理解数据库报错机制的必修课很多人看到“基于报错的SQL注入”第一反应是:这不就是老掉牙的extractvalue()、updatexml()那些函数吗?复制粘贴payload,跑个工具,弹个弹窗就完事了&#x…...

Linkey预取器:链表数据结构的高效内存访问优化
1. Linkey预取器架构解析 在计算机体系结构中,预取技术是提升内存访问性能的关键机制。传统预取器主要针对数组等连续内存访问模式进行优化,而Linkey预取器则专门为链表数据结构(Linked Data Structures, LDS)设计,通过…...