计算机竞赛 多目标跟踪算法 实时检测 - opencv 深度学习 机器视觉
文章目录
- 0 前言
- 2 先上成果
- 3 多目标跟踪的两种方法
- 3.1 方法1
- 3.2 方法2
- 4 Tracking By Detecting的跟踪过程
- 4.1 存在的问题
- 4.2 基于轨迹预测的跟踪方式
- 5 训练代码
- 6 最后
0 前言
🔥 优质竞赛项目系列,今天要分享的是
🚩 深度学习多目标跟踪 实时检测
该项目较为新颖,适合作为竞赛课题方向,学长非常推荐!
🥇学长这里给一个题目综合评分(每项满分5分)
- 难度系数:3分
- 工作量:3分
- 创新点:4分
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
2 先上成果

3 多目标跟踪的两种方法
3.1 方法1
基于初始化帧的跟踪,在视频第一帧中选择你的目标,之后交给跟踪算法去实现目标的跟踪。这种方式基本上只能跟踪你第一帧选中的目标,如果后续帧中出现了新的物体目标,算法是跟踪不到的。这种方式的优点是速度相对较快。缺点很明显,不能跟踪新出现的目标。
3.2 方法2
基于目标检测的跟踪,在视频每帧中先检测出来所有感兴趣的目标物体,然后将其与前一帧中检测出来的目标进行关联来实现跟踪的效果。这种方式的优点是可以在整个视频中跟踪随时出现的新目标,当然这种方式要求你前提得有一个好的“目标检测”算法。
学长主要分享Option2的实现原理,也就是Tracking By Detecting的跟踪方式。
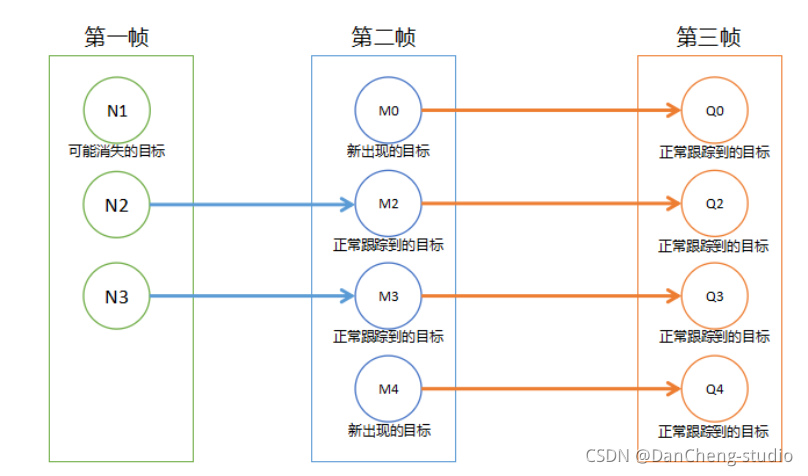
4 Tracking By Detecting的跟踪过程
**Step1:**使用目标检测算法将每帧中感兴趣的目标检测出来,得到对应的(位置坐标, 分类, 可信度),假设检测到的目标数量为M;
**Step2:**通过某种方式将Step1中的检测结果与上一帧中的检测目标(假设上一帧检测目标数量为N)一一关联起来。换句话说,就是在M*N个Pair中找出最像似的Pair。
对于Step2中的“某种方式”,其实有多种方式可以实现目标的关联,比如常见的计算两帧中两个目标之间的欧几里得距离(平面两点之间的直线距离),距离最短就认为是同一个目标,然后通过匈牙利算法找出最匹配的Pair。当让,你还可以加上其他的判断条件,比如我用到的IOU,计算两个目标Box(位置大小方框)的交并比,该值越接近1就代表是同一个目标。还有其他的比如判断两个目标的外观是否相似,这就需要用到一种外观模型去做比较了,可能耗时更长。
在关联的过程中,会出现三种情况:
1)在上一帧中的N个目标中找到了本次检测到的目标,说明正常跟踪到了;
2)在上一帧中的N个目标中没有找到本次检测到的目标,说明这个目标是这一帧中新出现的,所以我们需要把它记录下来,用于下下一次的跟踪关联;
3)在上一帧中存在某个目标,这一帧中并没有与之关联的目标,那么说明该目标可能从视野中消失了,我们需要将其移除。(注意这里的可能,因为有可能由于检测误差,在这一帧中该目标并没有被检测到)
4.1 存在的问题
上面提到的跟踪方法在正常情况下都能够很好的工作,但是如果视频中目标运动得很快,前后两帧中同一个目标运动的距离很远,那么这种跟踪方式就会出现问题。
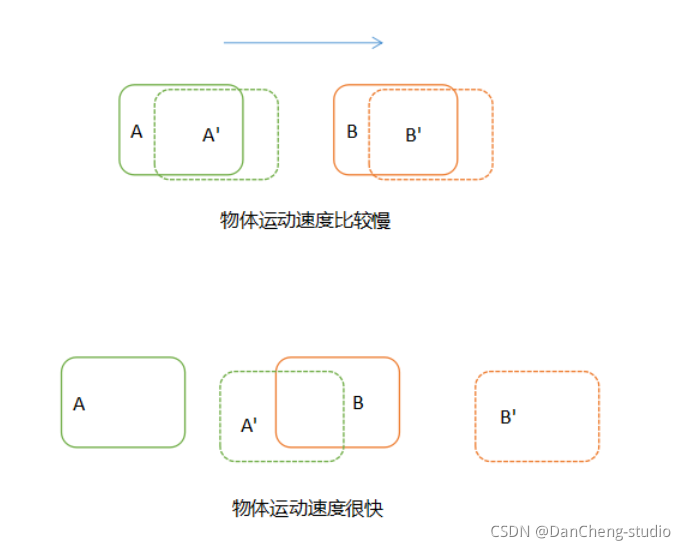
如上图,实线框表示目标在第一帧的位置,虚线框表示目标在第二帧的位置。当目标运行速度比较慢的时候,通过之前的跟踪方式可以很准确的关联(A, A’)和(B,
B’)。但是当目标运行速度很快(或者隔帧检测)时,在第二帧中,A就会运动到第一帧中B的位置,而B则运动到其他位置。这个时候使用上面的关联方法就会得到错误的结果。
那么怎样才能更加准确地进行跟踪呢?
4.2 基于轨迹预测的跟踪方式
既然通过第二帧的位置与第一帧的位置进行对比关联会出现误差,那么我们可以想办法在对比之前,先预测目标的下一帧会出现的位置,然后与该预测的位置来进行对比关联。这样的话,只要预测足够精确,那么几乎不会出现前面提到的由于速度太快而存在的误差
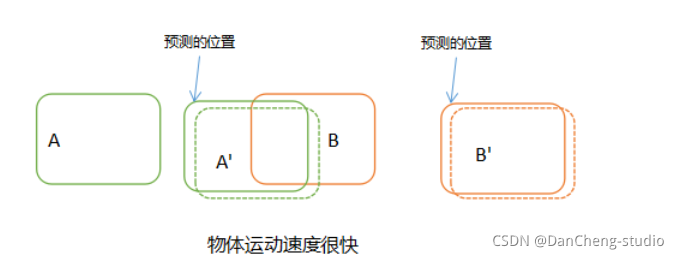
如上图,我们在对比关联之前,先预测出A和B在下一帧中的位置,然后再使用实际的检测位置与预测的位置进行对比关联,可以完美地解决上面提到的问题。理论上,不管目标速度多么快,都能关联上。那么问题来了,怎么预测目标在下一帧的位置?
方法有很多,可以使用卡尔曼滤波来根据目标前面几帧的轨迹来预测它下一帧的位置,还可以使用自己拟合出来的函数来预测下一帧的位置。实际过程中,我是使用拟合函数来预测目标在下一帧中的位置。
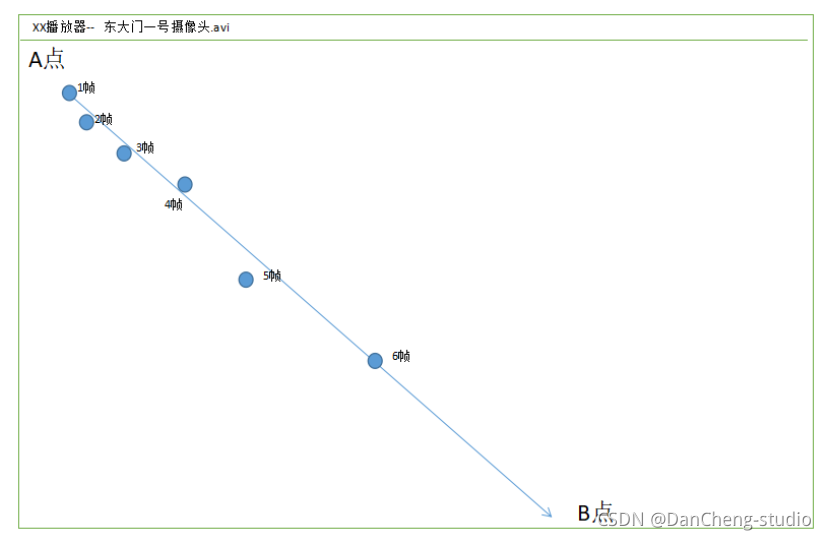
如上图,通过前面6帧的位置,我可以拟合出来一条(T->XY)的曲线(注意不是图中的直线),然后预测目标在T+1帧的位置。具体实现很简单,Python中的numpy库中有类似功能的方法。
5 训练代码
这里记录一下训练代码,来日更新
if FLAGS.mode == ‘eager_tf’:
# Eager mode is great for debugging
# Non eager graph mode is recommended for real training
avg_loss = tf.keras.metrics.Mean(‘loss’, dtype=tf.float32)
avg_val_loss = tf.keras.metrics.Mean(‘val_loss’, dtype=tf.float32)
for epoch in range(1, FLAGS.epochs + 1):for batch, (images, labels) in enumerate(train_dataset):with tf.GradientTape() as tape:outputs = model(images, training=True)regularization_loss = tf.reduce_sum(model.losses)pred_loss = []for output, label, loss_fn in zip(outputs, labels, loss):pred_loss.append(loss_fn(label, output))total_loss = tf.reduce_sum(pred_loss) + regularization_lossgrads = tape.gradient(total_loss, model.trainable_variables)optimizer.apply_gradients(zip(grads, model.trainable_variables))logging.info("{}_train_{}, {}, {}".format(epoch, batch, total_loss.numpy(),list(map(lambda x: np.sum(x.numpy()), pred_loss))))avg_loss.update_state(total_loss)for batch, (images, labels) in enumerate(val_dataset):outputs = model(images)regularization_loss = tf.reduce_sum(model.losses)pred_loss = []for output, label, loss_fn in zip(outputs, labels, loss):pred_loss.append(loss_fn(label, output))total_loss = tf.reduce_sum(pred_loss) + regularization_losslogging.info("{}_val_{}, {}, {}".format(epoch, batch, total_loss.numpy(),list(map(lambda x: np.sum(x.numpy()), pred_loss))))avg_val_loss.update_state(total_loss)logging.info("{}, train: {}, val: {}".format(epoch,avg_loss.result().numpy(),avg_val_loss.result().numpy()))avg_loss.reset_states()avg_val_loss.reset_states()model.save_weights('checkpoints/yolov3_train_{}.tf'.format(epoch))
6 最后
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
相关文章:
计算机竞赛 多目标跟踪算法 实时检测 - opencv 深度学习 机器视觉
文章目录 0 前言2 先上成果3 多目标跟踪的两种方法3.1 方法13.2 方法2 4 Tracking By Detecting的跟踪过程4.1 存在的问题4.2 基于轨迹预测的跟踪方式 5 训练代码6 最后 0 前言 🔥 优质竞赛项目系列,今天要分享的是 🚩 深度学习多目标跟踪 …...
一文了解大模型工作原理——以ChatGPT为例
文章目录 写在前面1.Tansformer架构模型2.ChatGPT原理3.提示学习与大模型能力的涌现3.1 提示学习3.2 上下文学习3.3 思维链 4.行业参考建议4.1 拥抱变化4.2 定位清晰4.3 合规可控4.4 经验沉淀 写在前面 2022年11月30日,ChatGPT模型问世后,立刻在全球范围…...

CPP-Templates-2nd--第十九章 萃取的实现 19.7---
目录 19.7 其它的萃取技术 19.7.1 If-Then-Else 19.7.2 探测不抛出异常的操作 19.7.3 萃取的便捷性(Traits Convenience) 别名模板和萃取(Alias Templates And Traits) 变量模板和萃取(Variable Templates and Traits&…...
python 采用selenium+cookies 获取登录后的网页
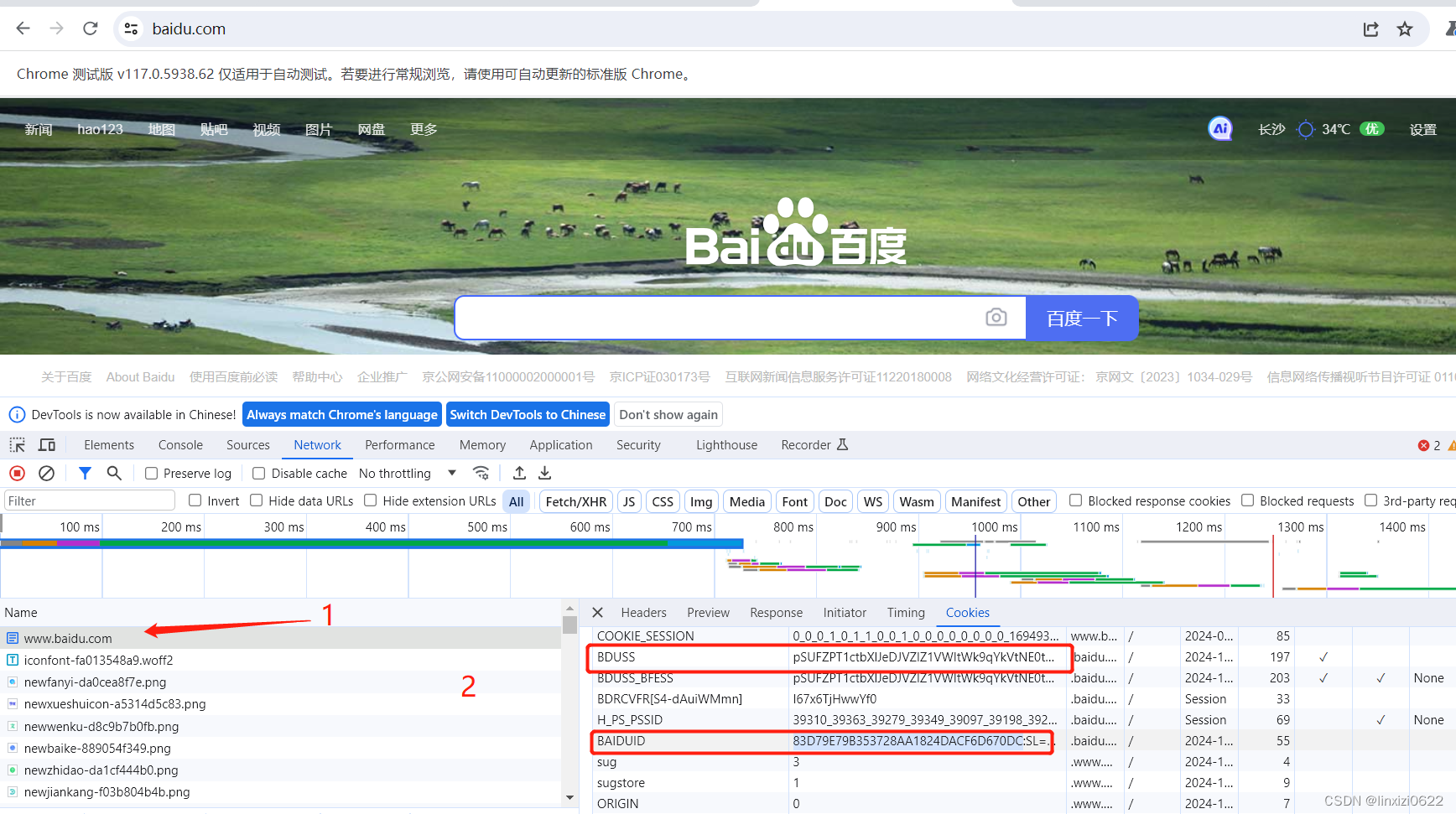
百度网页由于需要登陆手机短信验证。比较麻烦 这里我采用先人工登录百度账号,然后将百度账号的相关cookies保存下来 然后采用selenium动态登录网页 整体代码如下 from selenium import webdriverimport timeoptions webdriver.ChromeOptions()options.add_argu…...

【测试开发】答疑篇 · 什么是软件测试
【测试开发】答疑篇 文章目录 【测试开发】答疑篇1. 生活中的测试2. 什么是软件测试3. 为什么要有测试/没有测试行不行4. 软件测试和软件开发的区别5. 软件测试和软件调试之间的区别6. 软件测试的岗位7. 优秀测试人员具备的素质 【测试开发】答疑篇 软件不一定是桌面应用&#…...
深入解析顺序表:揭开数据结构的奥秘,掌握顺序表的精髓
💓 博客主页:江池俊的博客⏩ 收录专栏:数据结构探索👉专栏推荐:✅C语言初阶之路 ✅C语言进阶之路💻代码仓库:江池俊的代码仓库🔥编译环境:Visual Studio 2022Ἰ…...

数据风险量化评估方案
一、企业面临数据安全的痛点 1、企业缺少清晰的数据安全意识 各部门重视度不够,缺少主动数据安全管控意识。数据安全管控架构不清晰,职责划分不明确。对数据安全管控认识不全面、不深刻。工作人员对于所持有的数据缺乏概念,导致数据的价值无…...

EasyAVFilter代码示例之将视频点播文件转码成HLS(m3u8+ts)视频点播格式
以下是一套完整的视频点播功能开发源码,就简简单单几行代码,就可以完成原来ffmpeg很复杂的视频点播转码调用流程,而且还可以集成在自己的应用程序中调用,例如java、php、cgo、c、nodejs,不需要再单独一个ffmpeg的进程来…...
动态规划 part 11)
day-50 代码随想录算法训练营(19)动态规划 part 11
123.买卖股票的最佳时机||| 分析:只能买卖两次,就是说有五个状态: 没有买过第一次买入第一次卖出第二次买入第二次卖出 思路:二维数组,记录五个状态 1.dp存储:dp[i][1] 第一次买入 dp[i][2] 第一次卖…...

自定义权限指令与防止连点指令
1.权限指令 // 注册一个全局自定义权限指令 v-permission Vue.directive(permission, {inserted: function(el, binding, vnode) {const {value} binding; // 指令传的值// user:edit:phone,sysData:sampleconst permissions [user:edit:address, sysData:entrust, sysData:…...
UE5、CesiumForUnreal实现瓦片坐标信息图层效果
文章目录 1.实现目标2.实现过程2.1 原理简介2.2 cesium-native改造2.3 CesiumForUnreal改造2.4 运行测试3.参考资料1.实现目标 参考CesiumJs的TileCoordinatesImageryProvider,在CesiumForUnreal中也实现瓦片坐标信息图层的效果,便于后面在调试地形和影像瓦片的加载调度等过…...

PostgreSQL执行计划
1. EXPLAIN命令 1)PostgreSQL中EXPLAIN命令的语法格式: postgres# \h explain Command: EXPLAIN Description: show the execution plan of a statement Syntax: EXPLAIN [ ( option [, ...] ) ] statement EXPLAIN [ ANALYZE ] [ VERBOSE ] statementwhere option can be…...

【2023 睿思芯科 笔试题】~ 题目及参考答案
文章目录 1. 题目 & 答案单选题编程题问题1:解析1:问题2:解析2: 声明 名称如标题所示,希望大家正确食用(点赞转发评论) 本次笔试题以两种形式考察的,分别是:选择题&a…...

Java手写AVL树
Java手写AVL树 1. AVL树实现思路原理 为了解释AVL树的实现思路原理,下面使用Mermanid代码表示该算法的思维导图: #mermaid-svg-ycH8kKpzVk2HWEby {font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}#mermaid…...

运维自动化:提高效率的秘诀
🌷🍁 博主猫头虎(🐅🐾)带您 Go to New World✨🍁 🦄 博客首页——🐅🐾猫头虎的博客🎐 🐳 《面试题大全专栏》 🦕 文章图文…...
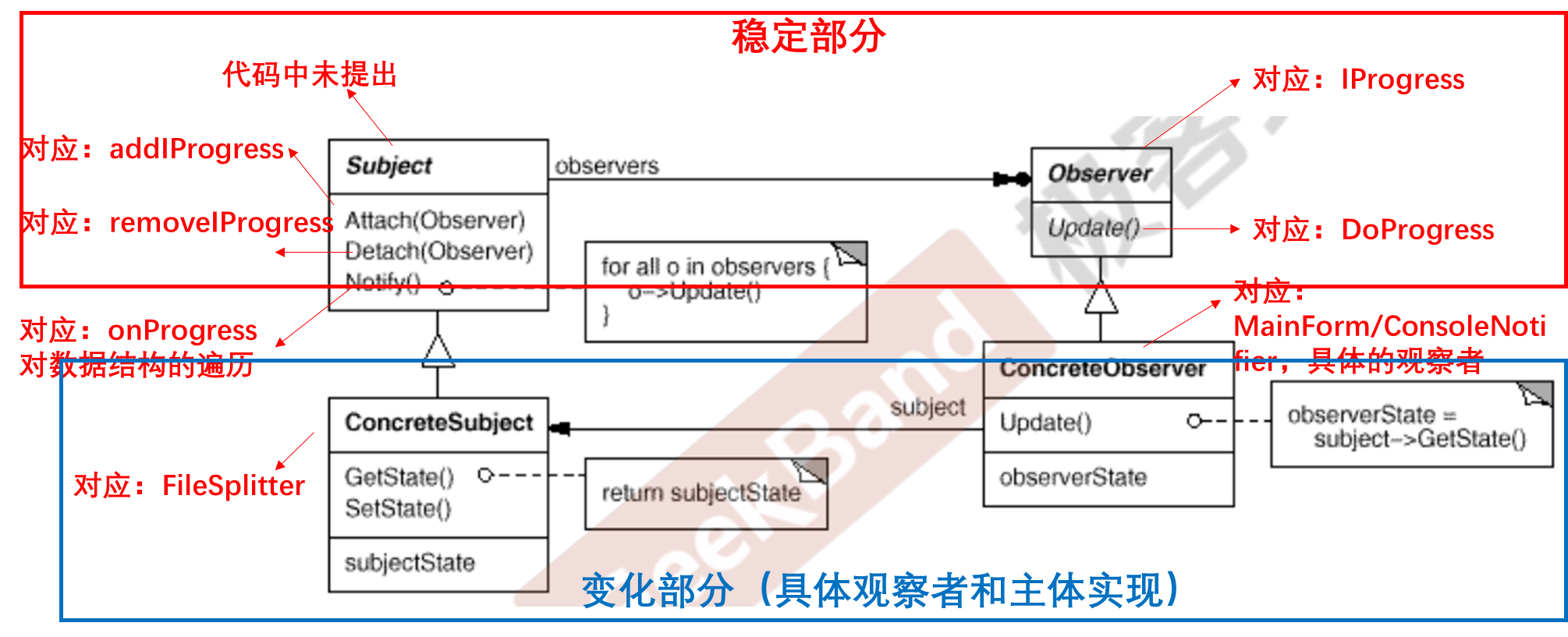
C++设计模式_05_Observer 观察者模式
接上篇,本篇将会介绍C设计模式中的Observer 观察者模式,和前2篇模板方法Template Method及Strategy 策略模式一样,仍属于“组件协作”模式。Observer 在某些领域也叫做 Event 。 文章目录 1. 动机( Motivation)2. 代码…...

github网站打不开,hosts文件配置
首先获取github官网的ip地址, 打开cmd,输入ping github.com 配置: #github 140.82.114.4 github.com 199.232.69.194 github.global.ssl.fastly.net 185.199.108.153 assets-cdn.github.com 185.199.110.153 assets-cdn.github.com 185.199…...

总结PCB设计的经验
一般PCB基本设计流程如下:前期准备->PCB结构设计->PCB布局->布线->布线优化和丝印->网络和DRC检查和结构检查->制版。: : 第一:前期准备。这包括准备元件库和原理图。“工欲善其事,必先利其器”,要做出一…...
HCIE-HCS规划设计搭建
1、相关术语 1、等价路由 等价路由(Equal-cost routing)是一种网络路由策略,用于在网络中选择多个具有相同路由度量(路由距离或成本)的最佳路径之一来转发数据流量。 当存在多个路径具有相同的路由度量时,…...
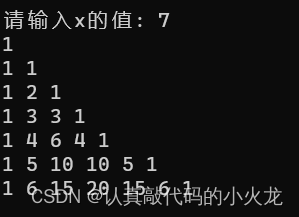
c语言输出杨辉三角
#include<stdio.h> int main() {int x 0; //表示杨辉三角的的大小int y 1;printf("请输入x的值: ");scanf("%d", &x);for (int i 0; i < x; i) {for (int j 0; j < i; j) {if (j 0 || i 0) {y 1;}else {y y * (i - j 1) / j;}pri…...

GitHub Enterprise MCP服务器:企业级代码管理的AI智能助手
1. 项目概述:当GitHub Enterprise遇上MCP,企业级代码管理的“智能副驾”最近在折腾企业内部的开发工具链,发现一个痛点:我们团队重度依赖GitHub Enterprise Server(GHES)进行代码托管和协作,但日…...

基于插件化架构的OBS实时音乐信息集成系统技术解析
基于插件化架构的OBS实时音乐信息集成系统技术解析 【免费下载链接】tuna Song information plugin for obs-studio 项目地址: https://gitcode.com/gh_mirrors/tuna1/tuna Tuna是一款面向OBS Studio的高性能插件化实时音乐信息集成系统,采用模块化架构设计&…...

实战复盘:我是如何通过一个SSRF漏洞,利用Gopher协议拿下内网Redis的
从SSRF到内网Redis入侵:一次真实渗透测试的深度剖析 那天下午,我正在对某企业Web应用进行常规安全评估。一个看似普通的文件下载接口引起了我的注意——它接受URL参数并返回对应资源内容。直觉告诉我,这里可能存在SSRF漏洞。接下来的72小时&a…...

PX4倾转垂起固定翼混控配置与硬件适配实战
1. PX4倾转垂起固定翼的核心概念解析 第一次接触倾转垂起固定翼的朋友可能会被这个名词吓到,其实它的原理并不复杂。简单来说,这是一种既能像多旋翼一样垂直起降,又能像固定翼飞机一样高效巡航的混合飞行器。我经手过的项目中,这种…...

深度评测:LeagueAkari如何用3项核心技术革新英雄联盟数据分析体验
深度评测:LeagueAkari如何用3项核心技术革新英雄联盟数据分析体验 【免费下载链接】League-Toolkit An all-in-one toolkit for LeagueClient. Gathering power 🚀. 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit 作为一名长期关注…...

EdgeDB终极性能优化指南:5个关键磁盘IO配置大幅提升数据读写速度 [特殊字符]
EdgeDB终极性能优化指南:5个关键磁盘IO配置大幅提升数据读写速度 🚀 【免费下载链接】edgedb Gel supercharges Postgres with a modern data model, graph queries, Auth & AI solutions, and much more. 项目地址: https://gitcode.com/gh_mirro…...

小白/程序员必备!收藏这份大模型AI学习资料,抓住高薪职业赛道!
小白/程序员必备!收藏这份大模型AI学习资料,抓住高薪职业赛道! 随着AI技术发展,AI人才需求激增,薪资待遇飙升。本文针对小白和程序员学习大模型AI的三大难题:缺乏理论、资源受限、底层逻辑难懂,…...

Python热重载工具Reloadium:实现函数级代码热更新与AI辅助开发
1. 项目概述:Reloadium,一个改变Python开发工作流的“时光机”如果你和我一样,是个常年泡在Python项目里的开发者,那你一定对“修改代码 -> 停止程序 -> 重新运行 -> 等待启动”这个循环深恶痛绝。尤其是在调试Web后端&a…...

[STM32U3] 【每周分享】【STM32U385RG 测评】+串口发送、接收数据
上篇串口通讯只是打印叔数据,这篇更进一步,将串口发送什么,就打印什么出来 一、查看原理图,确定自己需要的串口信息 还是一样的串口1 二、开始配置软件 上面基础配置结束之后,增加DMA以及NVIC配置 时钟可以根据自…...

modbus 512 断线重连 db browser for sqlite
断线重连 private async Task HeartbeatLoopAsync(CancellationToken token) {// 监工一直循环干活,直到工长喊停工(token.IsCancellationRequested)while (!token.IsCancellationRequested){try{// 每隔一段时间检查一次(最少20…...