使用键盘控制Franka机械臂运动
功能说明
使用键盘按键,可以控制franka机械臂7个关节角,已在真机上验证。
代码
主要使用的是官方包内的 franka_example_controllers
1、修改 include下的 joint_position_example_controller.h, 改为如下:
// Copyright (c) 2017 Franka Emika GmbH
// Use of this source code is governed by the Apache-2.0 license, see LICENSE
// 技术交流/服务 v: L2622452304
#pragma once#include <array>
#include <string>
#include <vector>#include <controller_interface/multi_interface_controller.h>
#include <hardware_interface/joint_command_interface.h>
#include <hardware_interface/robot_hw.h>
#include <ros/node_handle.h>
#include <ros/time.h>
#include <ros/ros.h>
#include <std_msgs/Float32MultiArray.h>namespace franka_example_controllers {class JointPositionExampleController : public controller_interface::MultiInterfaceController<hardware_interface::PositionJointInterface> {public:ros::NodeHandle n;bool init(hardware_interface::RobotHW* robot_hardware, ros::NodeHandle& node_handle) override;void joint_command_callback(const std_msgs::Float32MultiArray &msg);void starting(const ros::Time&) override;void update(const ros::Time&, const ros::Duration& period) override;std::array<float, 7> joints_position_change = {0.0,0.0,0.0,0.0,0.0,0.0,0.0};private:hardware_interface::PositionJointInterface* position_joint_interface_;std::vector<hardware_interface::JointHandle> position_joint_handles_;ros::Duration elapsed_time_;std::array<double, 7> initial_pose_{};};} // namespace franka_example_controllers2、修改 src下的 joint_position_example_controller.cpp, 改为如下:
// Copyright (c) 2017 Franka Emika GmbH
// Use of this source code is governed by the Apache-2.0 license, see LICENSE
#include <franka_example_controllers/joint_position_example_controller.h>#include <cmath>#include <controller_interface/controller_base.h>
#include <hardware_interface/hardware_interface.h>
#include <hardware_interface/joint_command_interface.h>
#include <pluginlib/class_list_macros.h>
// #include <ros/ros.h>namespace franka_example_controllers {bool JointPositionExampleController::init(hardware_interface::RobotHW* robot_hardware,ros::NodeHandle& node_handle) {n = node_handle;position_joint_interface_ = robot_hardware->get<hardware_interface::PositionJointInterface>();if (position_joint_interface_ == nullptr) {ROS_ERROR("JointPositionExampleController: Error getting position joint interface from hardware!");return false;}std::vector<std::string> joint_names;if (!node_handle.getParam("joint_names", joint_names)) {ROS_ERROR("JointPositionExampleController: Could not parse joint names");}if (joint_names.size() != 7) {ROS_ERROR_STREAM("JointPositionExampleController: Wrong number of joint names, got "<< joint_names.size() << " instead of 7 names!");return false;}position_joint_handles_.resize(7);for (size_t i = 0; i < 7; ++i) {try {position_joint_handles_[i] = position_joint_interface_->getHandle(joint_names[i]);} catch (const hardware_interface::HardwareInterfaceException& e) {ROS_ERROR_STREAM("JointPositionExampleController: Exception getting joint handles: " << e.what());return false;}}std::array<double, 7> q_start{{0, -M_PI_4, 0, -3 * M_PI_4, 0, M_PI_2, M_PI_4}};for (size_t i = 0; i < q_start.size(); i++) {if (std::abs(position_joint_handles_[i].getPosition() - q_start[i]) > 0.1) {ROS_ERROR_STREAM("JointPositionExampleController: Robot is not in the expected starting position for ""running this example. Run `roslaunch franka_example_controllers move_to_start.launch ""robot_ip:=<robot-ip> load_gripper:=<has-attached-gripper>` first.");return false;}}return true;
}void JointPositionExampleController::joint_command_callback(const std_msgs::Float32MultiArray &msg){for (size_t i = 0; i < 7; ++i) {joints_position_change[i] = msg.data[0];}
}void JointPositionExampleController::starting(const ros::Time& /* time */) {// for (size_t i = 0; i < 7; ++i) {// initial_pose_[i] = position_joint_handles_[i].getPosition();// }// elapsed_time_ = ros::Duration(0.0);// ros::init("keyboard_subscriber");ros::Subscriber joint_sub = n.subscribe("/keyboard", 1, &JointPositionExampleController::joint_command_callback,this);ros::spin();
}void JointPositionExampleController::update(const ros::Time& /*time*/,const ros::Duration& period) {// elapsed_time_ += period;// double delta_angle = M_PI / 16 * (1 - std::cos(M_PI / 5.0 * elapsed_time_.toSec())) * 0.2;// for (size_t i = 0; i < 7; ++i) {// if (i == 4) {// position_joint_handles_[i].setCommand(initial_pose_[i] - delta_angle);// } else {// position_joint_handles_[i].setCommand(initial_pose_[i] + delta_angle);// }// }for (size_t i = 0; i < 7; ++i) {initial_pose_[i] = position_joint_handles_[i].getPosition();}for (size_t i = 0; i < 7; ++i) {position_joint_handles_[i].setCommand(initial_pose_[i] + joints_position_change[i]);joints_position_change[i] = 0.0;}
}} // namespace franka_example_controllersPLUGINLIB_EXPORT_CLASS(franka_example_controllers::JointPositionExampleController,controller_interface::ControllerBase)3、在package下新建scripts文件夹,新建 joint_position_keyboard.py 程序,如下:
#! /usr/bin/env python
# 技术交流 /服务v: L2622452304
import rospy
from std_msgs.msg import Float32MultiArray
import sys, select, termios, tty
from threading import Threadjoints_change = {'1':(0,0.01),'q':(0,-0.01),'2':(1,0.01),'w':(1,-0.01),'3':(2,0.01),'e':(2,-0.01),'4':(3, 0.01),'r':(3,-0.01),'5':(4, 0.01),'t':(4,-0.01),'6':(5, 0.01),'y':(5,-0.01),'7':(6, 0.01),'u':(6,-0.01),}
key = ''
rospy.init_node('keyboard_pub')
pub = rospy.Publisher('/keyboard', Float32MultiArray, queue_size=1)def getKey():global keytty.setraw(sys.stdin.fileno())rlist, _, _ = select.select([sys.stdin], [], [], 0.1)if rlist:key = sys.stdin.read(1)if key == 'z':print('Stop')exit(0)else:key = ''termios.tcsetattr(sys.stdin, termios.TCSADRAIN, settings)def pub_command():global keyglobal pubkeyboard_command = Float32MultiArray()rate = rospy.Rate(100)while True:joints = [0.0,0.0,0.0,0.0,0.0,0.0,0.0]if key in joints_change.keys():joints[joints_change[key][0]] += joints_change[key][1]# print(joints)keyboard_command.data = jointspub.publish(keyboard_command)rate.sleep()if __name__ == '__main__':settings = termios.tcgetattr(sys.stdin)t = Thread(target=pub_command)t.start()try:while True:getKey()except rospy.ROSInterruptException:passtermios.tcsetattr(sys.stdin, termios.TCSADRAIN, settings)
实现原理
利用官方给的示例代码,稍作改动来驱动机械臂,然后用topic通信,把py获取的键盘控制信息发送到cpp内的机械臂控制循环中,实现关节运动控制。
使用
启动launch下的 joint_position_example_controller.launch,
<?xml version="1.0" ?>
<launch><include file="$(find franka_control)/launch/franka_control.launch" pass_all_args="true"/><arg name="arm_id" default="panda"/><rosparam command="load" file="$(find franka_example_controllers)/config/franka_example_controllers.yaml" subst_value="true" /><node name="controller_spawner" pkg="controller_manager" type="spawner" respawn="false" output="screen" args="joint_position_example_controller"/><node pkg="rviz" type="rviz" output="screen" name="rviz" args="-d $(find franka_example_controllers)/launch/robot.rviz -f $(arg arm_id)_link0 --splash-screen $(find franka_visualization)/splash.png"/>
</launch>也可实现键盘控制机械臂末端移动,但是代码为找到。后续可能继续更新在仿真中的实现。
相关文章:

使用键盘控制Franka机械臂运动
功能说明 使用键盘按键,可以控制franka机械臂7个关节角,已在真机上验证。 代码 主要使用的是官方包内的 franka_example_controllers 1、修改 include下的 joint_position_example_controller.h, 改为如下: // Copyright (c) 2017 Frank…...

力扣第45天----第392题、第115题
# 力扣第45天----第392题、第115题 文章目录 一、第392题--判断子序列二、第115题--不同的子序列 一、第392题–判断子序列 挺简单的,思路跟以前的都差不多。 class Solution { public:bool isSubsequence(string s, string t) {vector<vector<int>&g…...

扔掉你的开发板,跟我玩Mcore-全志h616
本文转载自WhyCan Forum(哇酷开发者社区): https://whycan.com/t_10024.html 作者leefei 这是一个1.69寸触摸小电视。使用全志H616芯片,板上硬件有mpu6050陀螺仪,USB转ttl调试串口,一个USB接口,WIFI&蓝牙&#x…...

【Linux】网络篇:UDP、TCP 网络接口及使用
文章目录 socket 及 相关补充0. netstat - - 查询当前服务器上网络服务器1. 端口号(port)2. 网络字节序3. sockaddr 结构体 一、socket 常见 APIUDP0. IP 地址转化 函数1. socket 函数:创建 socket 文件描述符 (TCP/UDP, 客户端 服务器)2. b…...
原理浅析-数学理论推导-2)
卡尔曼滤波(Kalman Filter)原理浅析-数学理论推导-2
目录 前言数学理论推导卡尔曼增益超详细数学推导结语参考 前言 最近项目需求涉及到目标跟踪部分,准备从 DeepSORT 多目标跟踪算法入手。DeepSORT 中涉及的内容有点多,以前也就对其进行了简单的了解,但是真正去做发现总是存在这样或者那样的困…...
SQL 性能优化总结
文章目录 一、性能优化策略二、索引创建规则三、查询优化总结 一、性能优化策略 1. SQL 语句中 IN 包含的值不应过多 MySQL 将 IN中的常量全部存储在一个排好序的数组里面,但是如果数值较多,产生的消耗也是比较大的。所以对于连续的数值,能用…...

MYSQL事务隔离级别分析
MYSQL事务隔离级别分析 不可重复读和幻读的区别? 不可重复读和幻读的区别? 先理解几个概念 不可重复读 一个事务中,后续查询结果得到不同的数据,可被重复读隔离级别解决幻影 出现在查询结果集中但不出现在较早查询的结果集中的行幻…...

学习javaEE初阶的第一堂课
学习金字塔 java发展简史 Java最初诞生的时候是用来写前端的!! 199x年 199x年,互联网还处在比较早期的阶段,当时主流的编程语言是 C/C, 有个大佬要搞个"智能面包机",觉得用C来做太难了 于是就基于C搞了个简单点的语言,Java 就诞生了~~ 遗憾的是项目流产了,没做成…...

请问一下就是业务概念模型和业务逻辑模型有啥关系
请问一下就是业务概念模型和业务逻辑模型有啥关系? 业务概念模型和业务逻辑模型是业务建模的两个关键组成部分,两者密切相关但又有所不同。 1.业务概念模型:这是对业务术语、定义和关系的一种抽象表示。它是从业务专家那里获得的知识&#…...

3.2 Android eBPF程序类型
写在前面 为什么要先了解eBPF程序类型? 从帮助函数中,我们可能基于内核的eBPF开放API,对eBPF的能力有一个比较细致的认识,但是这并不能让我们从全局,或者更概括的认识eBPF。eBPF程序类型能够更宏观的告诉我们,eBPF能做哪些事情(除网络相关)。 一,eBPF程序类型 内核…...
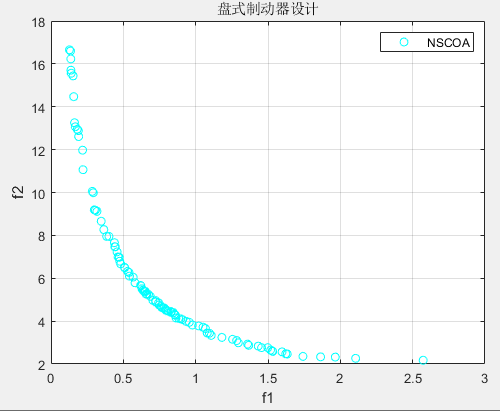
多目标优化算法:基于非支配排序的小龙虾优化算法(NSCOA)MATLAB
一、小龙虾优化算法COA 小龙虾优化算法(Crayfsh optimization algorithm,COA)由Jia Heming 等人于2023年提出,该算法模拟小龙虾的避暑、竞争和觅食行为,具有搜索速度快,搜索能力强,能够有效平衡…...
Linux学习第13天:嵌入式LinuxLED驱动开发:一字一符总见情
在正式写这篇笔记前,有一个事情必须要说一下。昨天更新的基于API函数的字符设备驱动开发按照正常的教程来说应该在本笔记后一天更新才对。但是由于我一时的疏忽,跳过了本笔记。在昨天学习基于API函数的时候造成了一定程度的困扰。今天重翻教程的时候才发…...

ModuleNotFoundError: No module named ‘omni‘
install isaac sim on linux open the isaac sim folder in /home//.local/share/ov/pkg/isaac_sim-2022.1.1 source setup_python_env.sh ./python.sh standalone_examples/replicator/offline_generation.pyNo module named ‘omni.isaac’...

题解:ABC320B - Longest Palindrome
题解:ABC320B - Longest Palindrome 题目 链接:Atcoder。 链接:洛谷。 难度 算法难度:C。 思维难度:C。 调码难度:C。 综合评价:入门。 算法 字符串处理。 思路 通过双层循环分别枚…...
-[代理执行器(Agent Executor):结合使用Agent和VectorStore])
大模型从入门到应用——LangChain:代理(Agents)-[代理执行器(Agent Executor):结合使用Agent和VectorStore]
分类目录:《大模型从入门到应用》总目录 代理执行器接受一个代理和工具,并使用代理来决定调用哪些工具以及以何种顺序调用。本文将参数如何结合使用Agent和VectorStore。这种用法是将数据加载到VectorStore中,并希望以Agent的方式与之进行交互…...

【算法题】100040. 让所有学生保持开心的分组方法数
题目: 给你一个下标从 0 开始、长度为 n 的整数数组 nums ,其中 n 是班级中学生的总数。班主任希望能够在让所有学生保持开心的情况下选出一组学生: 如果能够满足下述两个条件之一,则认为第 i 位学生将会保持开心: …...
TrOCR – 基于 Transformer 的 OCR 入门
一、TrOCR 架构 近些年,光学字符识别 (OCR) 出现了多项创新。它对零售、医疗保健、银行和许多其他行业的影响是巨大的。与深度学习的许多其他领域一样,OCR领域也看到了Transformer 神经网络的重要性和影响。如今,出现了像TrOCR(Transformer OCR)这样的模型,它在准确性方面…...

单例模式优缺点
单例模式是一种创建型设计模式,其主要目的是确保类只有一个实例,并提供全局访问点来获取该实例。单例模式具有一些优点和缺点,下面我将列出它们: **优点:** 1. **全局唯一性**:单例模式确保在应用程序中只…...

【Java 基础篇】Java 字节流详解:从入门到精通
Java中的字节流是处理二进制数据的关键工具之一。无论是文件操作、网络通信还是数据处理,字节流都发挥着重要作用。本文将从基础概念开始,深入探讨Java字节流的使用,旨在帮助初学者理解和掌握这一重要主题。 什么是字节流? 在Ja…...
Vue记录(下篇)
Vuex getters配置项 *Count.vue <template><div><h1>当前求和为:{{$store.state.sum}}</h1><h3>当前求和的10倍为:{{$store.getters.bigSum}}</h3><select v-model.number"n"><option value&q…...
)
别再复制粘贴了!手把手教你为51单片机LCD12864制作自定义中文字库(Keil C51环境)
从零构建51单片机LCD12864自定义中文字库的完整实战指南 在嵌入式显示领域,标准字库往往无法满足个性化需求。当我们需要在LCD12864屏幕上显示特殊符号、品牌LOGO或艺术字体时,自定义字库技术就成为关键突破点。本文将彻底解析从字模提取到ROM优化的全流…...

AI自动化新范式:基于MCP协议实现飞书与AI助手深度集成
1. 项目概述与核心价值如果你和我一样,每天的工作都离不开飞书,那你肯定也遇到过这样的场景:想用AI助手帮你整理会议纪要、自动更新项目文档,或者根据Bitable里的数据生成周报,却发现AI只能“看”不能“动”。它理解你…...

LLM与图数据库融合:自然语言驱动知识图谱查询实战
1. 项目概述:当LLM遇见图数据库,知识推理的新范式最近在探索如何让大语言模型(LLM)更好地处理复杂、结构化的知识时,我遇到了一个非常有意思的项目:dylanhogg/llmgraph。这个项目本质上是一个桥梁ÿ…...

交完Essay才发现Turnitin更新了AI检测?我是这么应对的
上学期我的一个朋友被约谈了。 教授发邮件说:"你的Essay和AI生成文本相似度过高,请来办公室解释。" 他确实用了AI——谁没用呢——但他也认真改写了好几遍。问题是,Turnitin在2025年更新了AI检测模型,现在它不只看词汇…...

有机颜料哪个更前沿
下游行业不断升级,从环保要求到个性化着色需求都在提升,很多采购和技术负责人都会问:现在有机颜料哪个方向更前沿?其实有机颜料的技术迭代始终围绕下游需求走,没有绝对的“最优前沿”,只有更适配自身需求的…...

资深运维的Helm Chart私藏库:高质量K8s应用部署实战指南
1. 项目概述:一个资深运维的Helm Chart私藏库如果你和我一样,长期在Kubernetes(K8s)的“牧场”里当“牛仔”(Sysop),那你肯定明白,找到一个质量上乘、维护及时、配置合理的Helm Char…...

InputTip:提升表单体验的动态输入引导组件设计与实战
1. 项目概述:一个被低估的输入增强工具 在桌面应用开发中,我们常常会花费大量精力去构建复杂的业务逻辑和炫酷的界面,却容易忽略一个直接影响用户体验的细节: 输入引导 。回想一下,你是否遇到过这样的场景࿱…...

BG3ModManager终极指南:如何轻松管理博德之门3模组避免游戏崩溃?
BG3ModManager终极指南:如何轻松管理博德之门3模组避免游戏崩溃? 【免费下载链接】BG3ModManager A mod manager for Baldurs Gate 3. This is the only official source! 项目地址: https://gitcode.com/gh_mirrors/bg/BG3ModManager BG3ModMana…...

Windows删除文件权限问题解决
首先,强制删除的文件将不经过回收站。方法一:可视化获取权限如果文件不是被系统占用,可以直接在文件属性中抢夺控制权。获取所有权:右键点击该文件/文件夹,选择 属性 → 安全 → 高级-。在打开的窗口中,点击…...

手机主板级维修
在智能手机高度普及的今天,一块主板几乎承载了用户所有的数字生活——从个人照片、工作文档到社交聊天记录。当设备遭遇进水、重摔或系统崩溃时,普通软件扫描往往束手无策,而“手机数据恢复”中的主板级维修技术,正成为破解这类“…...