STM32——SPI通信
文章目录
- SPI(Serial Peripheral Interface)概述:
- SPI的硬件连接:
- SPI的特点和优势:
- SPI的常见应用:
- SPI的工作方式和时序图分析:
- 工作模式
- 传输模式与时序分析
- 工作流程
- SPI设备的寄存器结构和寄存器设置
- SPI设备寄存器结构:
- 常见的寄存器设置:
- STM32F4xx SPI 模块特性
- 如何调试SPI通信问题和故障排除
SPI(Serial Peripheral Interface)概述:
SPI是一种串行通信接口,用于在微控制器、传感器、存储器等设备之间进行数据传输。
SPI通信通常涉及一个主设备(Master)和一个或多个从设备(Slave),通过共享时钟信号和数据线进行通信。
SPI的硬件连接:
SPI使用四条信号线:时钟线(SCLK)、主设备输出线(MOSI)、主设备输入线(MISO)和片选线(SS)。
通信过程中,主设备通过时钟线产生时钟信号,控制数据传输的时序。
主设备通过MOSI线发送数据,而从设备通过MISO线返回响应数据。
片选线用于选择要与主设备进行通信的从设备。
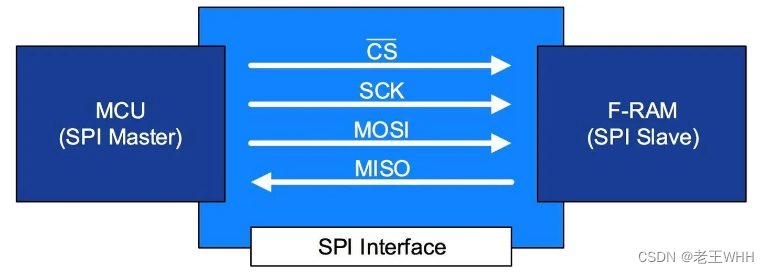
一主一从连接

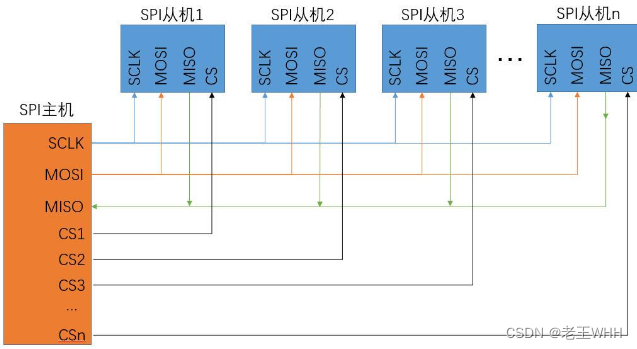
一主多从连接
SPI的特点和优势:
SPI支持高速的全双工数据传输、只需少量的信号线和硬件引脚、SPI可以连接多个从设备,每个从设备都有独立的片选线,方便扩展和集成多个设备、SPI通常用于设备之间的短距离通信,如同一个电路板上的通信。
SPI的常见应用:
存储器接口:SPI常用于与闪存、EEPROM等存储器设备进行通信。
传感器接口:许多传感器模块使用SPI接口与主控制器通信,如加速度计、陀螺仪等。
显示器接口:某些显示模块使用SPI接口进行数据传输。
无线通信模块:一些无线模块,如WiFi模块、蓝牙模块等,可以通过SPI与主控制器通信。
SPI的工作方式和时序图分析:
工作模式
配置SPI设备的参数,如时钟频率、数据位数和传输模式。本模块代码参考博客:https://blog.51cto.com/u_15903730/6163015
主模式(Master Mode):
在主模式下,一个主设备控制整个SPI通信过程。主设备负责生成时钟信号(SCLK)和控制片选信号(SS)来选择从设备,并通过MOSI线(Master Output Slave Input)向从设备发送数据。同时,主设备通过MISO线(Master Input Slave Output)接收从设备返回的数据。
#include <stdio.h>
#include <stdlib.h>
#include <stdint.h>
#include "stm32f4xx.h"#define SPIx SPI1
#define GPIO_AF_SPIx GPIO_AF5_SPI1
#define GPIO_CS GPIO_Pin_4
#define GPIO_CLK GPIO_Pin_5
#define GPIO_MISO GPIO_Pin_6
#define GPIO_MOSI GPIO_Pin_7void init_spi(void)
{SPI_InitTypeDef spi_init_struct;GPIO_InitTypeDef gpio_init_struct;/* Enable the SPI clock */RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE);/* Enable the GPIO clock */RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);/* Configure the chip select pin as output */gpio_init_struct.GPIO_Mode = GPIO_Mode_OUT;gpio_init_struct.GPIO_OType = GPIO_OType_PP;gpio_init_struct.GPIO_Pin = GPIO_CS;gpio_init_struct.GPIO_PuPd = GPIO_PuPd_NOPULL;gpio_init_struct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &gpio_init_struct);/* Configure the SPI pins */gpio_init_struct.GPIO_Mode = GPIO_Mode_AF;gpio_init_struct.GPIO_OType = GPIO_OType_PP;gpio_init_struct.GPIO_Pin = GPIO_CLK | GPIO_MISO | GPIO_MOSI;gpio_init_struct.GPIO_PuPd = GPIO_PuPd_NOPULL;gpio_init_struct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &gpio_init_struct);/* Connect the SPI pins to their alternate functions */GPIO_PinAFConfig(GPIOA, GPIO_PinSource5, GPIO_AF_SPIx);GPIO_PinAFConfig(GPIOA, GPIO_PinSource6, GPIO_AF_SPIx);GPIO_PinAFConfig(GPIOA, GPIO_PinSource7, GPIO_AF_SPIx);/* Configure the SPI peripheral */spi_init_struct.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_4;spi_init_struct.SPI_CPHA = SPI_CPHA_1Edge;spi_init_struct.SPI_CPOL = SPI_CPOL_Low;spi_init_struct.SPI_CRCPolynomial = 7;spi_init_struct.SPI_DataSize = SPI_DataSize_8b;spi_init_struct.SPI_Direction = SPI_Direction_2Lines_FullDuplex;spi_init_struct.SPI_FirstBit = SPI_FirstBit_MSB;spi_init_struct.SPI_Mode = SPI_Mode_Master;spi_init_struct.SPI_NSS = SPI_NSS_Soft;SPI_Init(SPIx, &spi_init_struct);/* Enable the SPI peripheral */SPI_Cmd(SPIx, ENABLE);
}uint8_t spi_send_byte(uint8_t byte)
{/* Wait for any pending transfers to complete */while (SPI_I2S_GetFlagStatus(SPIx, SPI_I2S_FLAG_TXE) == RESET);/* Send the byte */SPI_I2S_SendData(SPIx, byte);/* Wait for the transfer to complete */while (SPI_I2S_GetFlagStatus(SPIx, SPI_I2S_FLAG_RXNE) == RESET);/* Return the received byte */return SPI_I2S_ReceiveData(SPIx);
}int main(void)
{uint8_t data;/* Initialize the SPI module */init_spi();/* Select the slave device */GPIO_ResetBits(GPIOA, GPIO_CS);/* Send some data */data = spi_send_byte(0xAA);printf("Received: 0x%02X\n", data);/* Deselect the slave device */GPIO_SetBits(GPIOA, GPIO_CS);return 0;
}从模式(Slave Mode):
在从模式下,从设备被动地响应主设备的控制。从设备通过MISO线接收主设备发送的数据,并通过MOSI线向主设备返回数据。从设备在接收到有效的片选信号(SS)后才会响应数据传输。
#include <stdio.h>
#include <stdlib.h>
#include <stdint.h>
#include "stm32f4xx.h"#define SPIx SPI1
#define GPIO_AF_SPIx GPIO_AF5_SPI1
#define GPIO_CS GPIO_Pin_4
#define GPIO_CLK GPIO_Pin_5
#define GPIO_MISO GPIO_Pin_6
#define GPIO_MOSI GPIO_Pin_7void init_spi(void)
{SPI_InitTypeDef spi_init_struct;GPIO_InitTypeDef gpio_init_struct;/* Enable the SPI clock */RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE);/* Enable the GPIO clock */RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);/* Configure the chip select pin as output */gpio_init_struct.GPIO_Mode = GPIO_Mode_OUT;gpio_init_struct.GPIO_OType = GPIO_OType_PP;gpio_init_struct.GPIO_Pin = GPIO_CS;gpio_init_struct.GPIO_PuPd = GPIO_PuPd_NOPULL;gpio_init_struct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &gpio_init_struct);/* Configure the SPI pins */gpio_init_struct.GPIO_Mode = GPIO_Mode_AF;gpio_init_struct.GPIO_OType = GPIO_OType_PP;gpio_init_struct.GPIO_Pin = GPIO_CLK | GPIO_MISO | GPIO_MOSI;gpio_init_struct.GPIO_PuPd = GPIO_PuPd_NOPULL;gpio_init_struct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &gpio_init_struct);/* Connect the SPI pins to their alternate functions */GPIO_PinAFConfig(GPIOA, GPIO_PinSource5, GPIO_AF_SPIx);GPIO_PinAFConfig(GPIOA, GPIO_PinSource6, GPIO_AF_SPIx);GPIO_PinAFConfig(GPIOA, GPIO_PinSource7, GPIO_AF_SPIx);/* Configure the SPI peripheral */spi_init_struct.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_4;spi_init_struct.SPI_CPHA = SPI_CPHA_1Edge;spi_init_struct.SPI_CPOL = SPI_CPOL_Low;spi_init_struct.SPI_CRCPolynomial = 7;spi_init_struct.SPI_DataSize = SPI_DataSize_8b;spi_init_struct.SPI_Direction = SPI_Direction_2Lines_FullDuplex;spi_init_struct.SPI_FirstBit = SPI_FirstBit_MSB;spi_init_struct.SPI_Mode = SPI_Mode_Slave;spi_init_struct.SPI_NSS = SPI_NSS_Hard;SPI_Init(SPIx, &spi_init_struct);/* Enable the SPI peripheral */SPI_Cmd(SPIx, ENABLE);
}uint8_t spi_receive_byte(void)
{/* Wait for any pending transfers to complete */while (SPI_I2S_GetFlagStatus(SPIx, SPI_I2S_FLAG_TXE) == RESET);/* Return the received byte */return SPI_I2S_ReceiveData(SPIx);
}void spi_send_byte(uint8_t byte)
{/* Wait for any pending transfers to complete */while (SPI_I2S_GetFlagStatus(SPIx, SPI_I2S_FLAG_TXE) == RESET);/* Send the byte */SPI_I2S_SendData(SPIx, byte);/* Wait for the transfer to complete */while (SPI_I2S_GetFlagStatus(SPIx, SPI_I2S_FLAG_RXNE) == RESET);/* Clear the receive buffer */SPI_I2S_ReceiveData(SPIx);
}int main(void)
{uint8_t data;/* Initialize the SPI module */init_spi();/* Wait for the chip select signal */while (GPIO_ReadInputDataBit(GPIOA, GPIO_CS) != Bit_RESET);/* Loop forever */while (1){/* Receive some data */data = spi_receive_byte();/* Process the data */printf("Received: 0x%02X\n", data);/* Send a response */spi_send_byte(0xAA);}return 0;
}
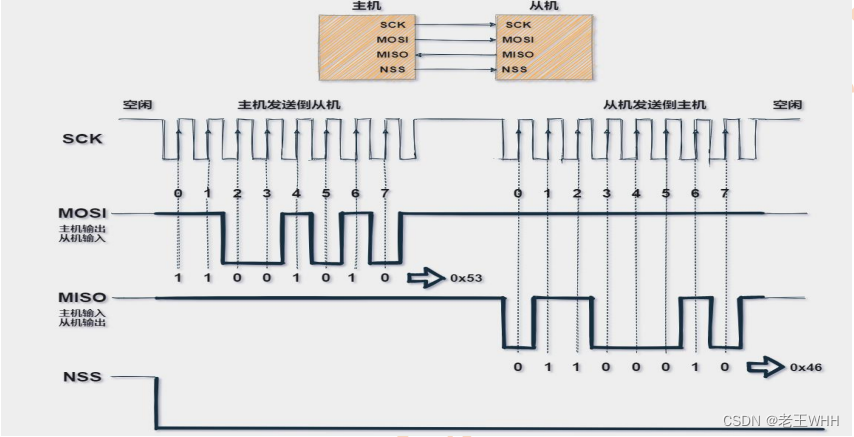
传输模式与时序分析
时钟极性和相位(Clock Polarity and Phase):
SPI接口还具有时钟极性(CPOL)和时钟相位(CPHA)的设置。CPOL定义了时钟信号在空闲状态时的电平,可以是高电平(CPOL=1)或低电平(CPOL=0)。CPHA定义了数据采样的时机,可以是在时钟信号的上升沿(CPHA=0)或下降沿(CPHA=1)进行采样。
根据CPOL和CPHA的不同组合,可以有四种不同的时钟极性和相位模式,分别为:
模式0:CPOL=0,CPHA=0
模式1:CPOL=0,CPHA=1
模式2:CPOL=1,CPHA=0
模式3:CPOL=1,CPHA=1
时钟极性和相位的设置需要主设备和从设备之间保持一致,以确保正确的数据传输。SPI 总线有四种工作方式(SP0, SP1, SP2, SP3),其中使用的最为广泛的是 SPI0 和和 SPI3 方式
读取数据方式:
00 起始电平为低电平—>数据采样(读数据)在第一个边沿,时钟线从低到高跳变的时候,数据线保持不变,这时候读数据,时钟线从高到底跳变的时候,数据线可以变化,发送数据,所以上升沿读,下降沿写
01 起始电平为低电平—>数据采样(读数据)在第二个边沿,时钟线从低到高跳变的时候,数据线可以变化,发送数据,时钟线从高到底跳变的时候,数据线保持不变,这时候读数据,所以上升沿写,下降沿读
10 起始电平是高点平—>数据采样(读数据)在第一个边沿,时钟线从高到低跳变的时候,数据线保持不变,这时候读数据,时钟线从低到高跳变的时候,数据线可以变化,发送数据,所以,下降沿读,上升沿写
11 起始电平是高点平—>数据采样(读数据)在第二个边沿,时钟线从高到低跳变的时候,数据线可以变化,发送数据,时钟线从低到高跳变的时候,数据线保持不变,这时候读数据,所以,下降沿写,上升沿读

每次传输数据的宽度为 8bit,上升沿发送、下降沿接收、高位先发送。
上升沿到来的时候,MOSI 上的电平将被发送到从设备的寄存器中。
下降沿到来的时候,MISO 上的电平将被接收到主设备的寄存器中。
工作流程
- SPI通信工作流程
1)硬件连接:
首先,确保SPI主机(如微控制器)和SPI从机(外部设备)之间正确连接。通常,SPI通信需要四根线:SCLK(时钟线)、MOSI(主机输出从机输入线)、MISO(主机输入从机输出线)和SS(从机选择线)。
2)主机配置:
主机(如微控制器)需要配置SPI控制器的相关寄存器或寄存器位,以设置通信参数,如时钟速率、数据位顺序、数据传输模式等。
3)选择从机:
主机通过设置SS线(从机选择线)来选择要与之通信的从机。如果有多个从机连接到同一总线,主机需要选择其中一个从机与之通信,常通过将SS线拉低来选中对应的从机。
4)数据传输:
SPI通信是全双工的,数据可以同时在主机和从机之间传输。
主机通过SCLK线发送时钟信号,驱动数据传输的时序。主机在每个时钟周期的上升沿或下降沿将数据位推送到MOSI线上,发送给从机。从机在相应的时钟边沿读取MOSI线上的数据位,并将响应的数据位推送到MISO线上,供主机读取。数据传输可以按照指定的字节、位数或连续传输的方式进行。
5)传输完成:
传输完成后,可以继续进行下一次传输或者释放SPI总线。
SPI设备的寄存器结构和寄存器设置
SPI设备寄存器结构:
控制寄存器(Control Register):控制SPI设备的操作模式、时钟频率、数据位顺序等设置。
状态寄存器(Status Register):提供SPI设备的状态信息,如传输完成标志、错误标志等。
数据寄存器(Data Register):用于存储要发送或接收的数据。
常见的寄存器设置:
操作模式(Mode):SPI设备通常支持多种操作模式,如主模式(Master Mode)和从模式(Slave Mode)。通过控制寄存器的相关位,选择适当的模式。
时钟频率(Clock Frequency):SPI设备的通信速率由时钟频率决定。控制寄存器中的时钟分频位或配置寄存器可以用于设置合适的时钟频率。
时钟极性和相位(Clock Polarity and Phase):SPI设备的时钟极性(CPOL)和时钟相位(CPHA)设置决定了数据采样和传输的时机。通过控制寄存器的相关位设置CPOL和CPHA。
数据位顺序(Data Bit Order):SPI设备可以支持先传输最高有效位(MSB)或先传输最低有效位(LSB)。寄存器中的位序设置可以用于选择合适的数据位顺序。
中断使能(Interrupt Enable):SPI设备通常支持中断功能,用于通知主设备有数据可用或传输完成。中断使能位可以在控制寄存器中设置。
具体参考技术文档、参考文档、数据手册来确定产品的使用。
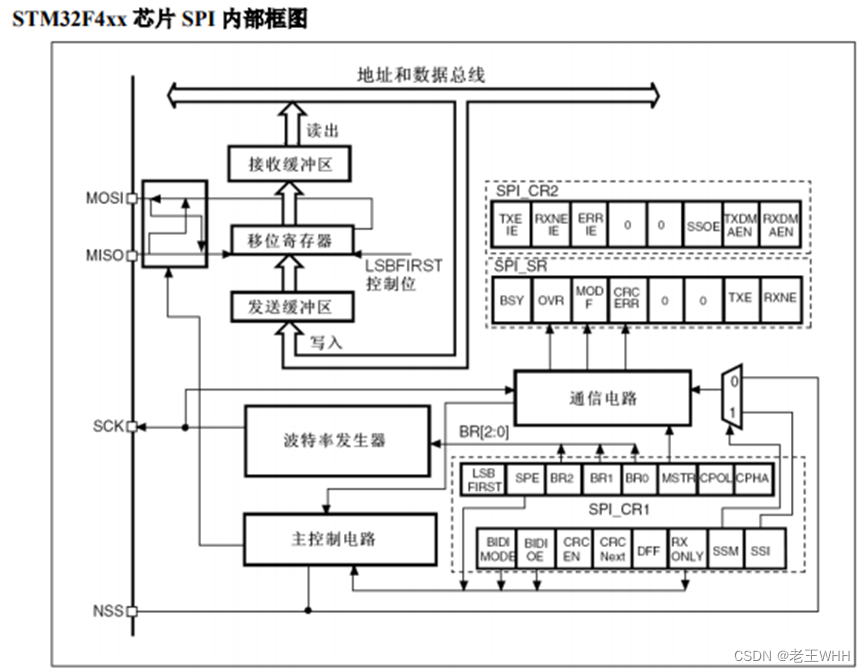
STM32F4xx SPI 模块特性
1) 由 SPI 模块中 SCLK、MOSI 和 MISO 三线组成全双工同步传输
2) 支持数据传输位宽为 8 位数据或 16 位数据
3) 可以通过软件设置 SPI 模块为主机模式或从机模式
4) 可以对 SPI 的时钟源进行分频,来做为作为主机或从机时的通讯速度(分频最大值为 fPCLK/2),但 STM32F401xE 的 SPI 模块最大通信速度为 42MHz (spi1,spi4)或者 21Mhz(spi2,spi3)。
5) 可以使用软件对 SPI 的通讯时序(时钟极性和时钟相位)进行选择
6) 可以对 SPI 数据传输顺序进行选择为最先移位 MSB 或 LSB
7) SPI 模块的中断源为:SPI 数据发送和接收、主模式故障、数据上溢(过载)以及 CRC 错误
8) SPI 可以利用 DMA 功能对数据进行每次 1 字节发送和接收。
如何调试SPI通信问题和故障排除
掌握常见的SPI通信错误和解决方法,如时钟频率不匹配、数据线连接错误等。
1.串口显示内容但是乱码:时钟频率两端不匹配,重新调频率
2.无现象或者本来有现象后来突然中断通信:数据线是否连接错误,附近是否有信号干扰,检查电源线是否未连接好
3.冲突和协议错误:和板子的协议不匹配,先查看协议,检查硬件连接是否正确,确保SPI主设备和从设备之间的通信协议和数据格式设置正确。检查SPI设备的地址、片选信号等设置是否正确。确保主设备和从设备之间的通信时序和协议一致。检查设备的文档和规格说明,确保了解正确的配置和操作方法。
相关文章:
STM32——SPI通信
文章目录 SPI(Serial Peripheral Interface)概述:SPI的硬件连接:SPI的特点和优势:SPI的常见应用:SPI的工作方式和时序图分析:工作模式传输模式与时序分析工作流程 SPI设备的寄存器结构和寄存器设…...

Linux虚拟机局域网IP配置
前言 应用程序包部署在主机(Window)的虚拟机(Linux CentOS7)上,把主机当做一个服务器,在局域网中访问部署在主机上的应用程序,配置Linux网络。 文章如有侵权,无意为之,…...

MacOS删除.DS_Store文件
目录 .DS_Store是什么删除命令防止再生命令 .DS_Store是什么 在 Mac OS X 系统下,几乎绝大部分文件夹中都包含 .DS_Store 隐藏文件,这里保存着针对这个目录的特殊信息和设置配置,例如查看方式、图标大小以及这个目录的一些附属元数据。 而在…...
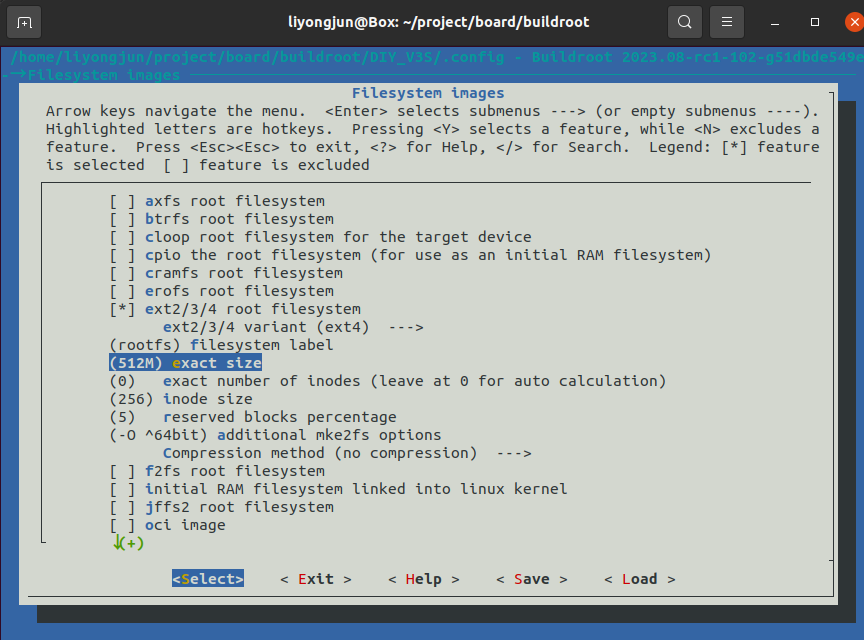
ARM Linux DIY(十一)板子名称、开机 logo、LCD 控制台、console 免登录、命令提示符、文件系统大小
文章目录 前言板子名称uboot Modelkernel 欢迎词、主机名 开机 logoLCD 控制台console 免登录命令提示符文件系统大小 前言 经过前面十篇文章的介绍,硬件部分调试基本完毕,接下来的文章开始介绍软件的个性化开发。 板子名称 uboot Model 既然是自己的…...

【Unity程序技巧】Unity中的单例模式的运用
👨💻个人主页:元宇宙-秩沅 👨💻 hallo 欢迎 点赞👍 收藏⭐ 留言📝 加关注✅! 👨💻 本文由 秩沅 原创 👨💻 收录于专栏:Uni…...
最长连续数列,移动零)
java leetcodetop100 (3,4 )最长连续数列,移动零
top3 最长连续数列 给定一个未排序的整数数组 nums ,找出数字连续的最长序列(不要求序列元素在原数组中连续)的长度。 * * 请你设计并实现时间复杂度为 O(n) 的算法解决此问题。 * * * * 示例 1: * * 输入:nums [100,…...
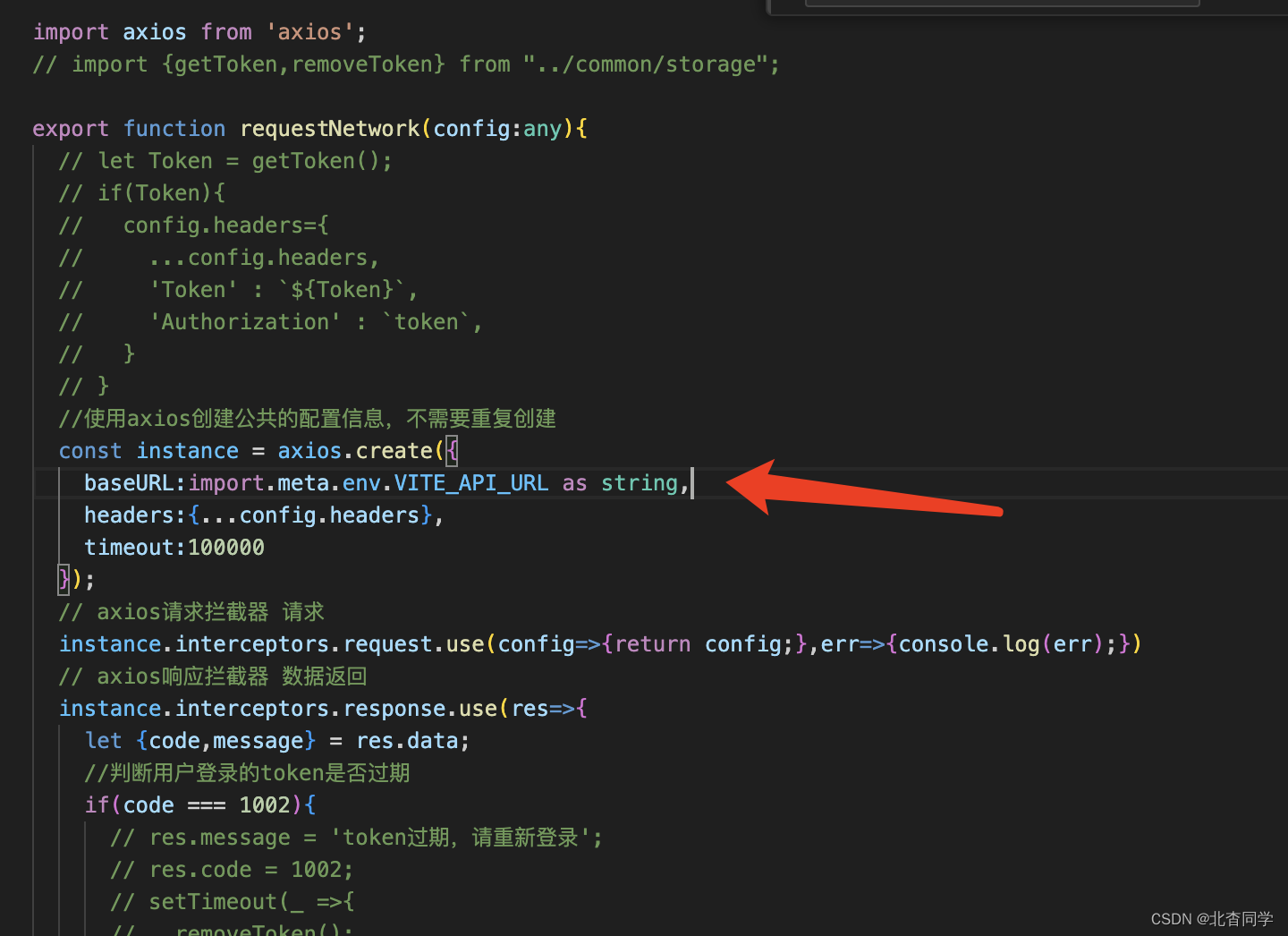
用Vite从零到一创建React+ts项目
方式一:使用create-react-app命令创建项目 1、使用以下命令初始化一个空的npm 项目 npm init -y 2、输入以下命令安装React npm i create-react-app ps:如果失败的话尝试(1:使用管理员身份执行命令(2:切换镜像重…...

HTTP状态码301(永久重定向)不同Web服务器的配置方法
文章目录 301状态码通常在那些情况下使用301永久重定向配置Nginx配置301永久重定向Windows配置IIS301永久重定向PHP下的301重定向Apache服务器实现301重定向 301重定向是否违反相关法规?推荐阅读 当用户或搜索引擎向服务器发出浏览请求时,服务器返回的HT…...

vue-element-admin项目部署 nginx动态代理 含Docker部署、 Jenkins构建
介绍三种方式: 1.直接部署到nginx中 2.用nginx docker镜像部署 3.使用Jenkins构建 1.直接用nginx部署 vue-element-admin项目下有两个.env文件,.env.production是生产环境的,.env.developpment是开发环境的 vue-element-admin默认用的是mock数…...
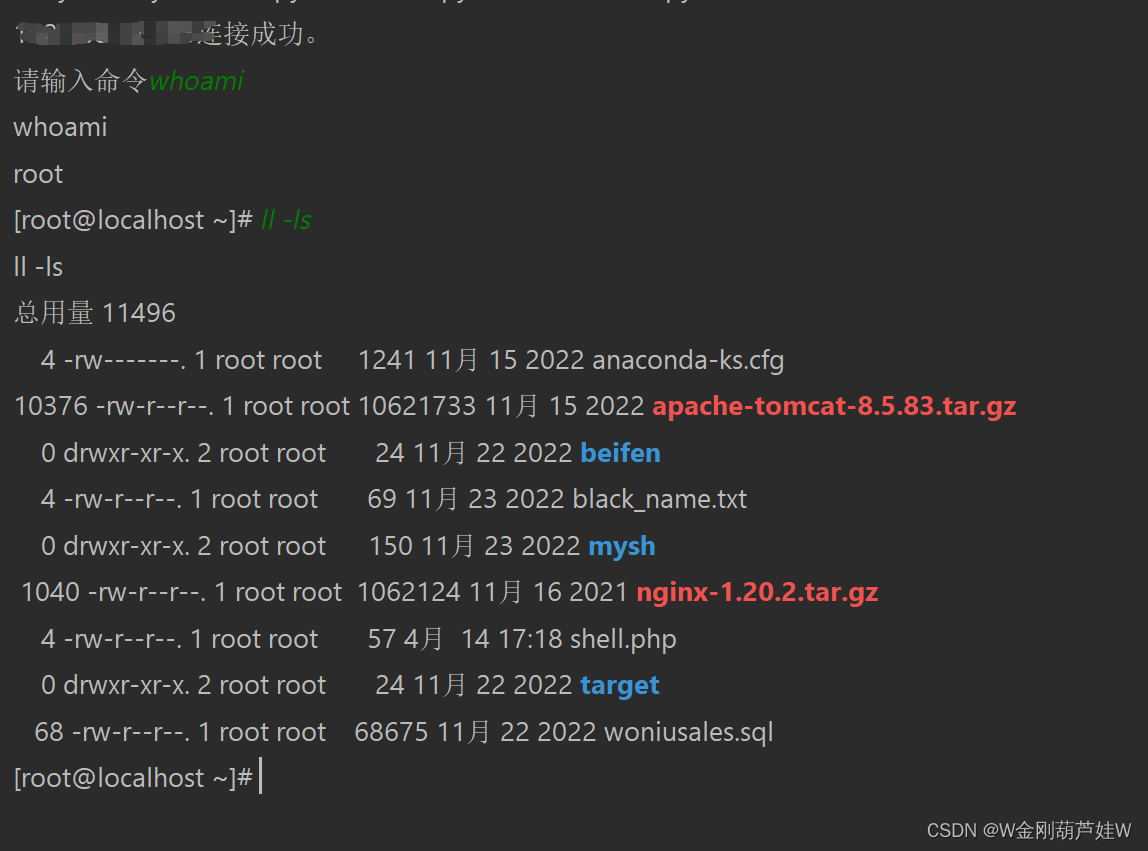
使用Python来写模拟Xshell实现远程命令执行与交互
一、模块 这里使用的是 paramiko带三方库 pip install paramiko二、效果图 三、代码实现(这里的IP,用户名,密码修改为自己对应服务器的) import paramiko import timeclass Linux(object):# 参数初始化def __init__(self, ip, us…...

mybatis 数据库字段为空or为空串 忽略条件过滤, 不为空且不为空串时才需nameParam过滤条件
name未配置视为不考虑name条件 select * from user where (( (ISNULL(name)) OR (name) ) OR name #{user.nameParam} ) 三个or语句 推荐这个 select * from user where ISNULL(name) OR name OR name #{user.nameParam} select * from user where ISNULL(name) OR …...
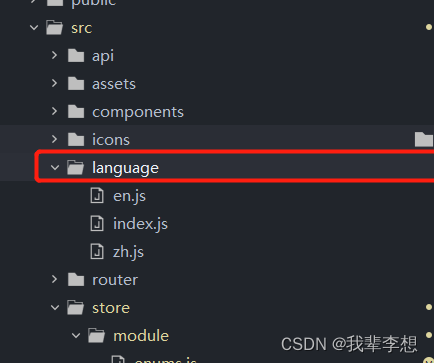
【玩玩Vue】通过vue-store实现枚举管理,用于下拉选项和中英文翻译等
原文作者:我辈李想 版权声明:文章原创,转载时请务必加上原文超链接、作者信息和本声明。 文章目录 一、store基础用法1.在src下新建store文件夹,在store下新建module文件夹2.在module下新建enums.js文件3.在store下新建getters.js…...

ISCSI:后端卷以LVM 的方式配置 ISCSI 目标启动器
写在前面 准备考试整理相关笔记博文内容涉及使用 LVM 做ISCSI 目标后端块存储 Demo理解不足小伙伴帮忙指正 对每个人而言,真正的职责只有一个:找到自我。然后在心中坚守其一生,全心全意,永不停息。所有其它的路都是不完整的&#…...

八公山豆腐发展现状与销售对策研究
1.引言 八公山豆腐作为中国传统特色食品之一,一直以来备受人们的喜爱。然而,在现代社会中,由于消费者对于营养健康的追求以及市场竞争的加剧,八公山豆腐的市场份额逐渐缩小。因此,为了更好地推广和发展八公山豆腐&…...

排序算法-插入排序
属性 当插入第i(i>1)个元素时,前面的array[0],array[1],…,array[i-1]已经排好序,此时用array[i]的排序码与array[i1],array[i-2],…的排序码顺序进行比较,找到插入位置即将array[i]插入,原来位置上的元素顺序后移 直接插入排序…...
数码管显示)
多位数按键操作(闪烁)数码管显示
/*----------------------------------------------- 内容:按键加减数字,多个数码管显示 ------------------------------------------------*/ #include<reg52.h> //包含头文件,一般情况不需要改动,头文件包含特殊功能寄存…...

MyEclipse项目导入与导出
一、项目导出 1、右键选择项目名称,弹出菜单中选择“export”,如下图所示 2、选择“恶心“export”,弹出菜单如下;在“General“选项中,选择“File System”选项 3、点击“next”,进入保存位置选择界面&am…...
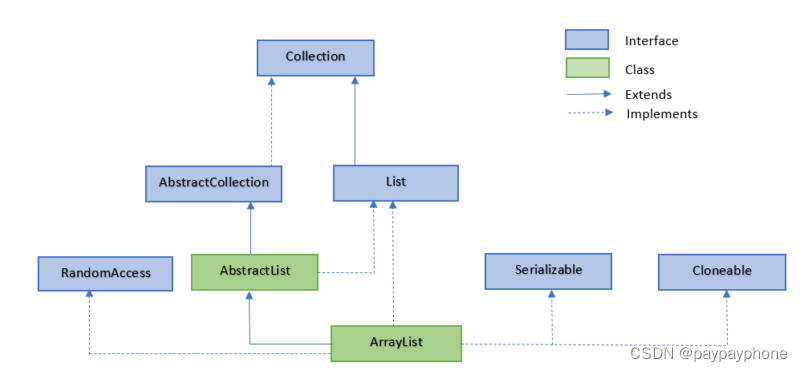
ArrayList和LinkedList
最近在刷回溯算法时,遇见了List<Integer> A new ArrayList<>(); LinkedList<Integer> B new LinkedList<>();这类型的表达方式 很好奇的问题是: 1、List<Integer> A new ArrayList<>();为什么是正确的写法 2…...

Linux 配置 Nginx 服务完整详细版
目录 前言 配置Nginx监听端口和服务器块 # 防DDoS配置 # 日志配置 # 设置服务器块 监听端口 网站根目录 默认文件 静态文件目录 图像文件目录 # 自定义错误页面 # 反向代理配置 # 配置SSL/TLS 1、获取SSL/TLS证书 2、安装证书 3、配置SSL/TLS # 配置SSL协议版本…...
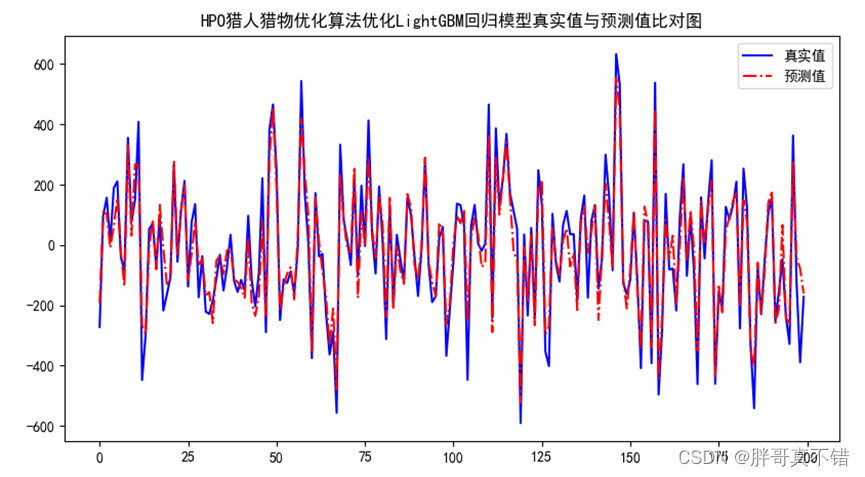
Python实现猎人猎物优化算法(HPO)优化LightGBM回归模型(LGBMRegressor算法)项目实战
说明:这是一个机器学习实战项目(附带数据代码文档视频讲解),如需数据代码文档视频讲解可以直接到文章最后获取。 1.项目背景 猎人猎物优化搜索算法(Hunter–prey optimizer, HPO)是由Naruei& Keynia于2022年提出的一种最新的…...

ARM A64指令集架构解析与优化实践
1. A64指令集架构概述A64指令集作为ARMv8-A架构的64位执行状态核心,采用固定32位长度编码设计,这种设计在指令获取和流水线处理上具有显著优势。与传统的变长指令集相比,固定长度编码使得指令预取和译码阶段更加高效,尤其适合现代…...

AI工作流框架实战:从脚本到自动化流程的架构设计与应用
1. 项目概述:当AI遇上工作流最近在折腾自动化工具链,发现一个挺有意思的项目叫ai-flow。这名字听起来就挺直白,AI 工作流。简单来说,它就是一个用代码来编排和自动化AI任务(比如调用大语言模型、处理数据、执行特定操…...

【DeepSeek Service Mesh安全白皮书首发】:零信任网络策略如何实现API级微隔离与自动证书轮转?
更多请点击: https://intelliparadigm.com 第一章:DeepSeek Service Mesh安全白皮书发布背景与核心价值 随着云原生架构在金融、政务及大规模企业级场景中深度落地,服务间通信的可信性、策略一致性与零信任合规性已成为架构演进的关键瓶颈。…...

自动驾驶安全迷思:从94%人为错误统计到ADAS与系统安全工程实践
1. 项目概述:一场关于自动驾驶安全统计数据的“祛魅”如果你最近几年关注过自动驾驶或者高级驾驶辅助系统的新闻,大概率听过一个被反复引用的“金科玉律”:94%的交通事故是由人为错误造成的。这个数字像一句魔咒,被无数自动驾驶公…...

ARM嵌入式开发:硬件抽象层与调试监控技术解析
1. ARM嵌入式开发中的硬件抽象层与调试监控在ARM嵌入式系统开发中,硬件抽象层(HAL)和调试监控器是两大核心基础设施。它们如同汽车的底盘和仪表盘——HAL负责统一管理发动机、变速箱等硬件组件,而调试监控器则提供实时运行数据与交…...

告别STM32cubeIDE的路径红波浪线:VSCode配置C/C++插件的保姆级指南
告别STM32cubeIDE的路径红波浪线:VSCode配置C/C插件的保姆级指南 对于习惯了STM32cubeIDE的嵌入式开发者来说,第一次用VSCode打开工程时,满屏的红色波浪线可能会让人瞬间崩溃。别担心,这不是你的代码有问题,而是VSCode…...

国际空间站工程知识共享:从太空协作到地面工程实践的启示
1. 国际空间站:一个工程师眼中的知识共享金矿作为一名在航天工程领域摸爬滚打了十几年的工程师,我常常被问到一个问题:耗资巨大的国际空间站(ISS),除了那些遥不可及的太空探索梦想,到底给我们这…...

详解 Deepsec:Vercel 开源 AI 代码安全防护工具的技术架构与实现原理
摘要在 AI 大模型深度融入软件开发全链路的今天,代码安全防护正面临 “复杂逻辑漏洞难发现、传统工具误报率高、源码隐私保护难” 三重核心挑战。Vercel 开源的 Deepsec 作为一款Agent 驱动的本地化 AI 安全防护工具,跳出传统 SAST(静态应用安…...

终极指南:如何用FanControl实现Windows系统风扇智能温控与静音优化
终极指南:如何用FanControl实现Windows系统风扇智能温控与静音优化 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gitcode.com/GitHub…...

除了综合,DC Shell还能这么用:快速搭建一个轻量级RTL/Netlist查看与调试环境
DC Shell的隐藏技能:打造高效RTL/Netlist交互式调试环境 在数字芯片设计流程中,工程师们经常需要快速查看和分析RTL或网表文件。传统方法要么启动完整的综合流程耗时费力,要么依赖第三方工具可能面临兼容性问题。实际上,Synopsys …...