机器视觉-标定篇
3D结构光标定
结构光视觉的优点:
非接触、信息量大、测精度高、抗干扰能力强。
结构光视觉传感器参数的标定包括:摄像机参数标定、结构光平面参数标定。
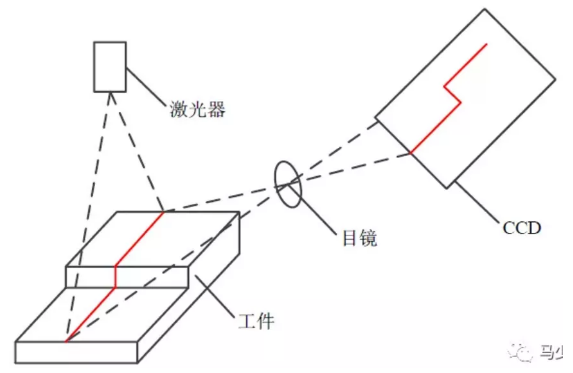
结构光视觉测量原理图
我们不考虑镜头的畸变,将相机的成像模型简化为小孔成像模型,则特征点的图像坐标Pf 与其在摄像机坐标系下的三维坐标P 之间的关系可表示为:
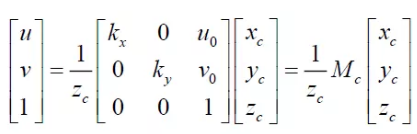
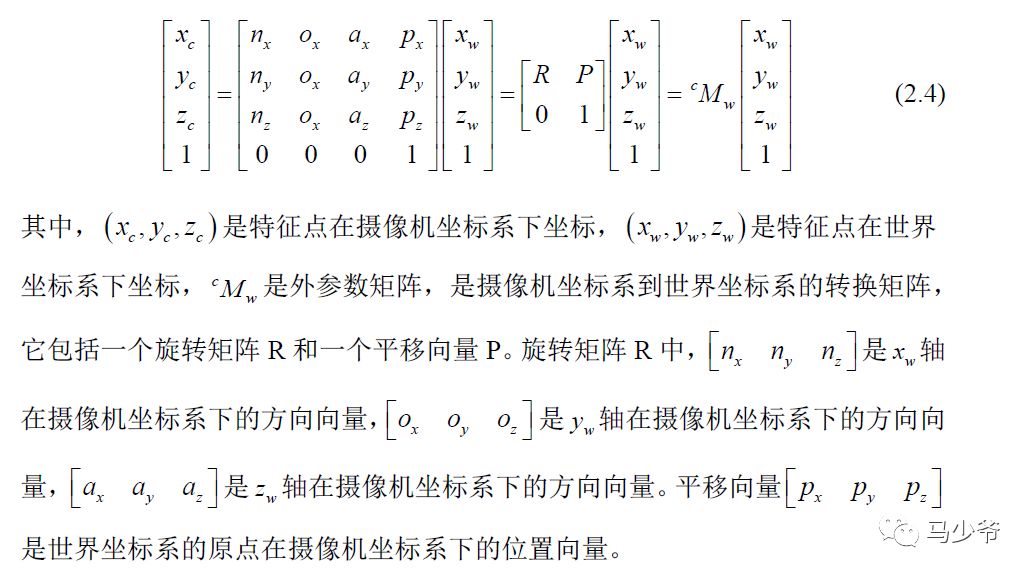
其中:(u,v)是特征点的图像坐标,(u0,v0) 光轴中心的图像坐标,(kx ky )是X 轴,Y 轴方向的放大系数,(xc yc zc) 是特征点在摄像机坐标系下坐标, Mc 是摄像机内参数矩阵。
结构光视觉投影成像模型:
设结构光在摄像头坐标系的平面方程为:

依据激光条纹特征点图像坐标就可以得到其在摄像机坐标系下的三维坐标
相机参数标定:
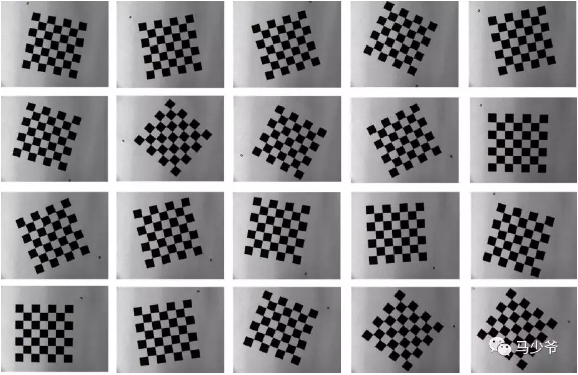
采用张正友提出的基于2D平面棋盘格的摄像机标定方法,利用Matlab摄像头标定工具完成相机参数的标定。
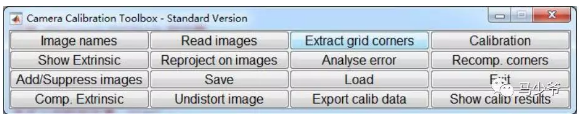
摄像机标定工具箱主窗口:
用于摄像机标定的棋盘格图像:
得到摄像机内参数矩阵:

结构光平面参数标定:
首先,激光器投射结构光平面到平面棋盘格上形成激光条纹,并通过CCD 摄像机采集激光条纹图像。然后,对图像进行处理,提取激光条纹上的两个特征点。控制机器人按照一定的约束进行运动,从一个标定位置移动到另一个位置,从而产生两条不共线的激光条纹,利用上述相同的图像处理方法再次提取激光条纹上的两个特征点。最后,利用结构光平面上的四个点来确定结构光平面方程参数。该方法可以在摄像机参数标定过程中,同时完成结构光平面方程参数的标定。同时,该方法不需要加工高精度的三维标定靶标,也不需要手工测量,标定过程简单实用。
试验装备:
一个六自由度机器人,一个CCD 工业摄像机,一个激光器和一个平面棋盘格靶标。
结构光平面参数标定系统示意图:
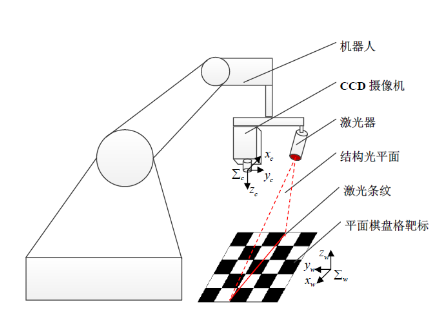
摄像机坐标系位于摄像机中心,而世界坐标系位于平面棋盘格靶标上。一个特征点在摄像机坐标系下坐标与其在世界坐标系下坐标之间的对应关系可以用下式来表达:
标定过程如下:
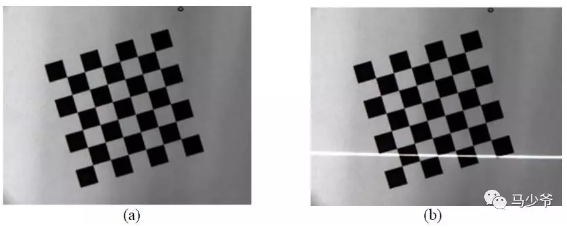
(1)图像获取:
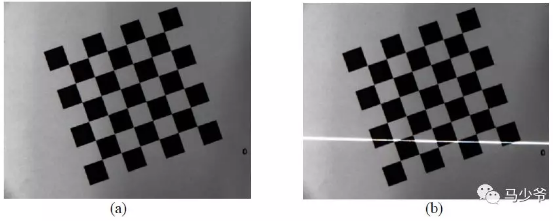
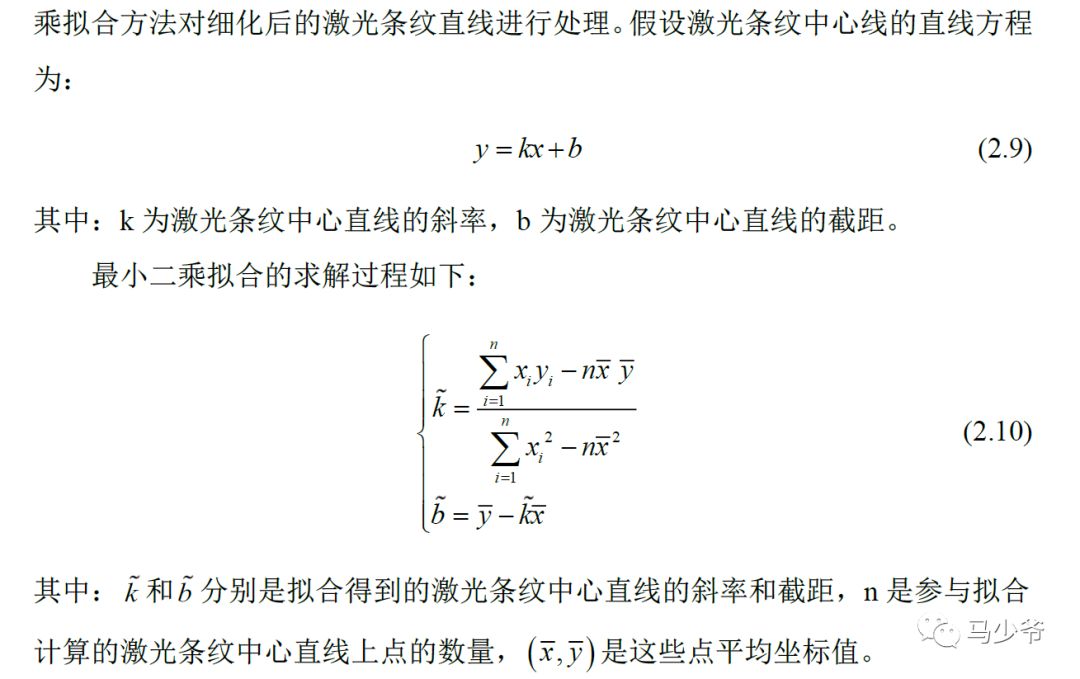
图像的获取是在摄机参数标定过程中同时完成。 首先将棋盘格放在工作台上, 在这个初始位置,利用摄像机采集一幅图,如图 (a) 所示 。保持摄像机和棋盘格的位置姿态不变,打开激光器让条纹投射到棋盘格上, 再采集一幅图像如图 (b) 所示:
然后改变棋盘格和摄像机的相对位姿,使前后形成的两条激光条纹在空间上不共线,即可确定一个唯一的结构光平面。
(2)图像处理:
图像处理的目的是提取激光条纹上特征点的图像坐标。
分为图像感兴趣区域(ROI)确定、自适应阈值分割、骨架细化和特征点计算。
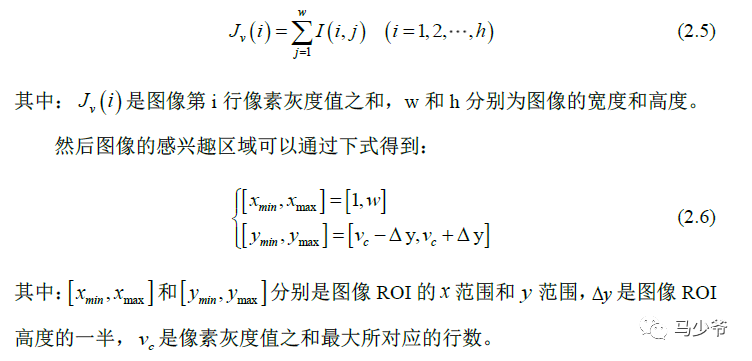
1)图像ROI确定
通过观察图像看出,激光条纹大致平行于图像的u 轴,而且激光条纹处像素的灰度值高于图像中其它像素的灰度值,所以图像的ROI 可以通过对每行像素灰度值进行求和得到:
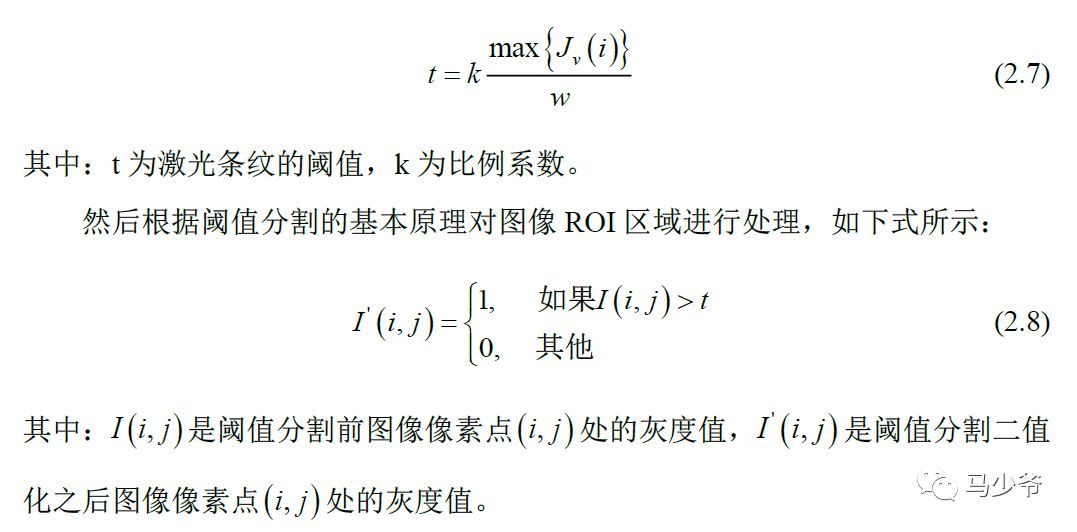
2)阈值分割
阈值分割分为全局阈值分割、局部阈值分割和自适应阈值分割。最常用的自适应阈值分割是Otsu方法,该方法使用统计学的方法确定最优的阈值,适用于一般的图像,但是不太适合于棋盘格上激光条纹的分割。
根据图像中激光条纹的灰度值高于图像中其它像素的灰度值以及激光条纹所在区域比较集中的特点,利用图像ROI 内行像素灰度值之和计算激光条纹的自适应阈值:
3) 骨架细化:
自适应阈值分割以后的激光条纹具有一定的宽度,直接处理计算量巨大而且精度较低,需要对图像进行骨架细化得到单像素的线。
采用下面文献中所提出的快速骨架细化方法:

该方法通过迭代提取图像骨架,每个迭代过程分为两步,第一步去除东南边缘和西北角的点,第二步去除西北边缘和东南角的点。
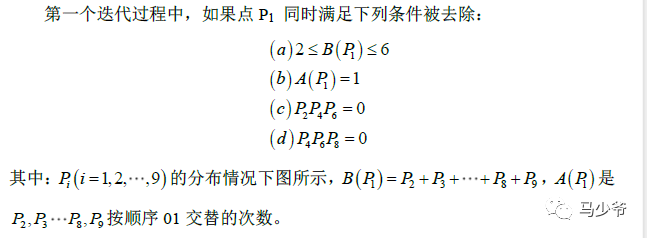
Pi分布情况如下:
第二个迭代过程将上述条件的c、d条件更改为:

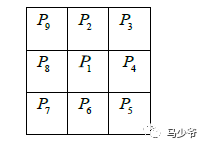
4)特征提取:
选取激光条纹中心线上的两个点作为激光条纹的特征点,为了提高激光条纹中心线的提取精度,利用最小二乘法拟合方法对细化后的激光条纹直线进行处理。
激光条纹特征点提取过程如下:
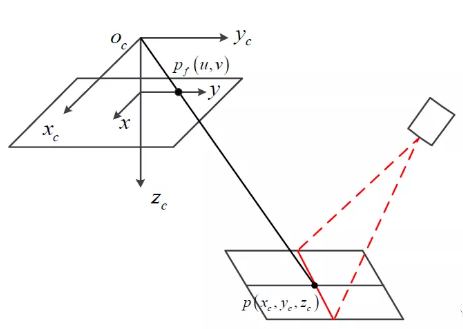
标定棋盘格平面内任意一点与法向量关系
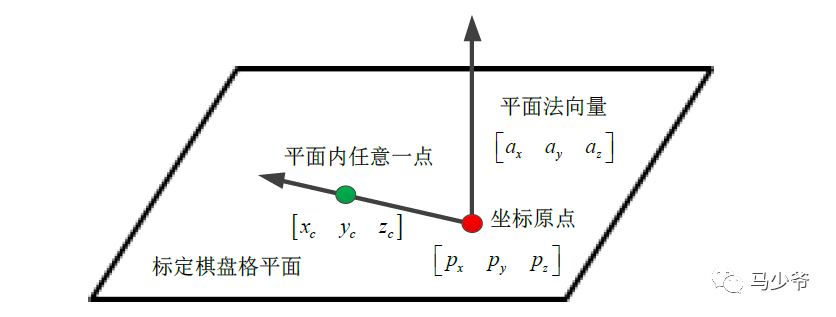
由上图可知:

由特征点的图像坐标Pf 与其在摄像机坐标系下的三维坐标P 之间的关系知:

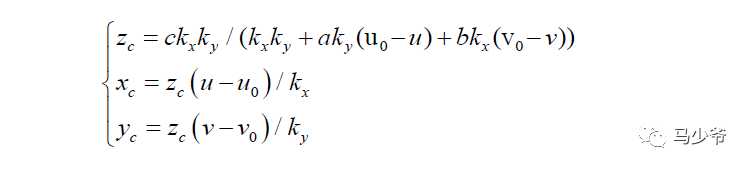
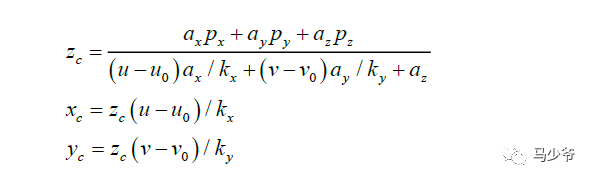
得到棋盘格上任意一点在摄像机坐标系下的zc 坐标

得到激光条纹特征点在摄像机坐标系下的坐标值
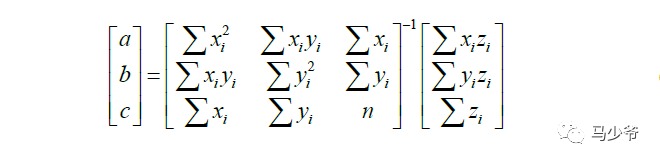
至此,得到四个激光条纹特征点的图像坐标,由上式得四个激光条纹特征点在摄像机坐标系下的坐标,由于三点确定一个平面方程,使用最小二乘法计算结构光平面方程如下:
参考文献:基于结构光视觉的焊缝识别与跟踪技术研究[D]. 中国科学院自动化研究所. 中国科学院大学. 2019.
3D视觉精品课程推荐:
1.面向自动驾驶领域的多传感器数据融合技术
2.面向自动驾驶领域的3D点云目标检测全栈学习路线!(单模态+多模态/数据+代码)
3.彻底搞透视觉三维重建:原理剖析、代码讲解、及优化改进
4.国内首个面向工业级实战的点云处理课程
5.激光-视觉-IMU-GPS融合SLAM算法梳理和代码讲解
6.彻底搞懂视觉-惯性SLAM:基于VINS-Fusion正式开课啦
7.彻底搞懂基于LOAM框架的3D激光SLAM: 源码剖析到算法优化
8.彻底剖析室内、室外激光SLAM关键算法原理、代码和实战(cartographer+LOAM +LIO-SAM)
9.从零搭建一套结构光3D重建系统[理论+源码+实践]
10.单目深度估计方法:算法梳理与代码实现
相关文章:
机器视觉-标定篇
3D结构光标定 结构光视觉的优点: 非接触、信息量大、测精度高、抗干扰能力强。 结构光视觉传感器参数的标定包括:摄像机参数标定、结构光平面参数标定。 结构光视觉测量原理图 我们不考虑镜头的畸变,将相机的成像模型简化为小孔成像模型…...

linux离线安装make
一、下载rpm包 https://pkgs.org/search/?qmake 二、拷贝至服务器 三、安装make rpm -ivh make-3.82-24.el7.x86_64.rpm四、查看是否安装成功 make -v...

【深度学习】卷积神经网络(LeNet)【文章重新修改中】
卷积神经网络 LeNet 前言LeNet 模型代码实现MINST代码分块解析1 构建 LeNet 网络结构2 加载数据集3 初始化模型和优化器4 训练模型5 训练完成 完整代码 Fashion-MINST代码分块解析1 构建 LeNet 网络结构2 初始化模型参数3 加载数据集4 定义损失函数和优化器5 训练模型 完整代码…...
win10 Baichuan2-7B-Chat-4bits 上部署 百川2-7B-对话模型-4bits量化版
搞了两天才搞清楚跑通 好难呢,个人电脑 win10 ,6GB显存 个人感觉 生成速度很慢,数学能力不怎么行 没有ChatGLM2-6B 强,逻辑还行, 要求: 我的部署流程 1.下载模型 ,下载所有文件 然后 放到新建的model目录 https://huggingface.co/baichuan-inc/Baichuan2-7B-Chat-4bits/tr…...
2023/9/20总结
maven maven本质是 一个项目管理工具 将项目开发 和 管理过程 抽象成 一个项目对象模型(POM) POM (Project Object Model) 项目对象模型 作用 项目构建 提供标准的自动化 项目构建 方式依赖管理 方便快捷的管理项目依赖的资源…...

【Git】git 分支或指定文件回退到指定版本
目录 一、分支回滚 1. 使用 git reset 命令 2.使用 git revert 命令 3.使用 git checkout 命令 二、某个文件回滚 1.查看哪些文件发生修改 2.然后查看提交记录(最近几次提交) 3.执行提交命令 一、分支回滚 1. 使用 git reset 命令 命令可以将当前分支的 HEAD 指针指向指…...
Java 消息策略的实现 - Kafak 是怎么设计的
这个也是开放讨论题,主要讨论下 Kafka 在消息中是如何进行实现的。 1_cCyPNzf95ygMFUgsrleHtw976506 21.4 KB 总结 这个题目的开发性太强了。 Kafka 可以用的地方非常多,我经历过的项目有 Kafka 用在消息处理策略上的。这个主要是 IoT 项目,…...
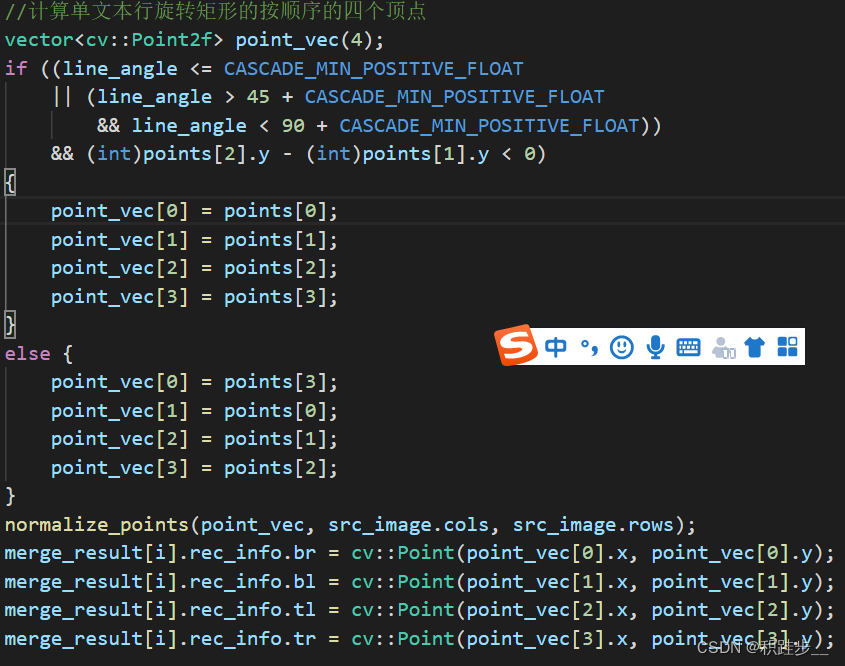
c++opencv RotatedRect 旋转矩形角度转换和顶点顺序转换
这里写自定义目录标题 以下代码记录主要是完成轮廓点求解最小外接矩形之后计算该文本行的角度和旋转矩形的左下(bl),左上(tl),右上(tr),右下(br)的坐标点。 RotatedRect rtminAreaRect(contours…...
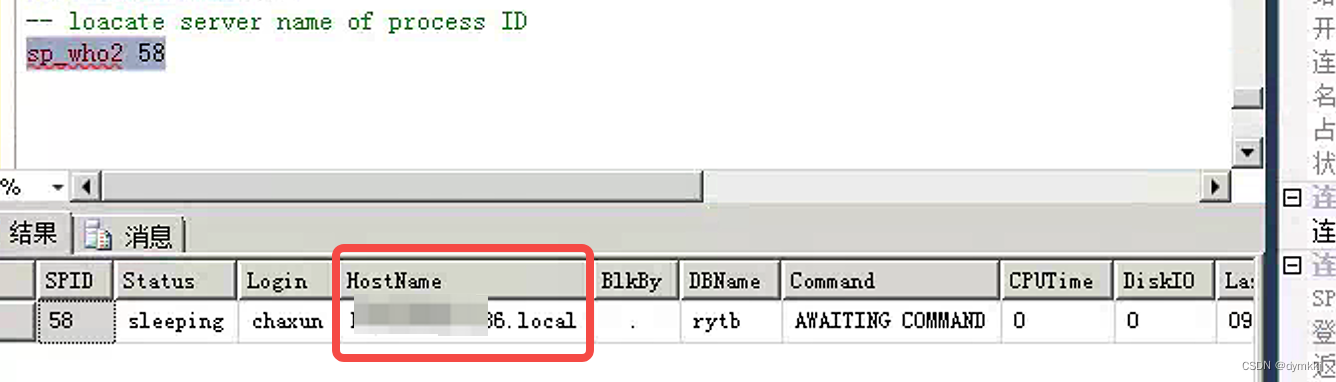
Flink-CDC 抽取SQLServer问题总结
Flink-CDC 抽取SQLServer问题总结 背景 flink-cdc 抽取数据到kafka 中,使用flink-sql进行开发,相关问题总结flink-cdc 配置SQLServer cdc参数 1.创建CDC 使用的角色, 并授权给其查询待采集数据数据库 -- a.创建角色 create role flink_role;-- b.授权…...
Linux 系统目录结构 终端
系统目录结构 Linux 或 Unix 操作系统中,所有文件和目录呈一个以根节点为始的倒置的树状结构。文件系统的最顶层是根目录,用 / 来表示根目录。在根目录之下的既可以是目录,也可以是文件,而每一个目录中又可以包含子目录文件。如此…...

Layui + Flask | 实现注册、登录功能(案例篇)(08)
此案例内容比较多,建议滑到最后点击阅读原文,阅读体验更佳。后续也会录制案例视频,将在本周内上传到同名的 b 站账号。 已经看了 layui 表单相关的知识,接下来就可以实现注册功能,功能逻辑如下: 项目创建 新建 flask 项目下载 layui 文件,解压之后复制到指定文件编写前…...

GitLab数据迁移后出现500错误
一、背景 去年做GitLab数据迁移时,写过一篇文章《GitLab的备份与还原》。后来发现新创建的项目没问题,但对于迁移过来的项目,修改名称等信息,或者删除该项目时,会出现500错误,以为是系统问题&#…...
音乐随行,公网畅享,群辉Audiostation给你带来听歌新体验!
文章目录 本教程解决的问题是:按照本教程方法操作后,达到的效果是本教程使用环境:1 群晖系统安装audiostation套件2 下载移动端app3 内网穿透,映射至公网 很多老铁想在上班路上听点喜欢的歌或者相声解解闷儿,于是打开手…...

机器学习入门:从算法到实际应用
机器学习入门:从算法到实际应用 机器学习入门:从算法到实际应用摘要引言机器学习基础1. 什么是机器学习?2. 监督学习 vs. 无监督学习 机器学习算法3. 线性回归4. 决策树和随机森林 数据准备和模型训练5. 数据预处理6. 模型训练与调优 实际应用…...

【Vue.js】vue-cli搭建SPA项目并实现路由与嵌套路由---详细讲解
一,何为SPA SPA(Single Page Application)是一种 Web 应用程序的开发模式,它通过使用 AJAX 技术从服务器异步加载数据,动态地更新页面内容,实现在同一个页面内切换不同的视图,而无需整页刷新 1.…...
Node.js 调用 fluent-ffmpeg
最近开发H5资源在线裁剪,最终在资源合成的步骤,选择 ffmpeg 作为合成的插件,记录下使用方式。 一、介绍 ffmpeg 一款跨平台多媒体处理工具,可以进行视频转码、裁剪、合成、音视频提取、推流等操作。 二、安装 Node js 可以利用…...

scrapy框架--
Scrapy是一个用于爬取数据的Python框架。下面是Scrapy框架的基本操作步骤: 安装Scrapy:首先,确保你已经安装好了Python和pip。然后,在命令行中运行以下命令安装Scrapy:pip install scrapy 创建Scrapy项目:…...

算法通关村第十五关——从40亿个数中产生一个不存在的数的处理方法
1.从40个亿中产生一个不存在的整数 题目要求:给定一个输入文件,包含40亿个非负整数,请设计一个算法,产生一个不存在该文件中的整数,假设你有1GB的内存来完成这项任务。**** 解题中心思想:存储的不是这40亿…...

软件项目开发的流程及关键点
软件项目开发的流程及关键点 graph LR A[需求分析] --> B[系统设计] B --> C[编码开发] C --> D[测试验证] D --> E[部署上线] E --> F[运维支持]在项目开发的流程中,首先是进行需求分析,明确项目的目标和功能要求。接下来是系统设计&am…...
)
全球变暖问题(floodfill 处理联通块问题)
全球变暖问题 文章目录 全球变暖问题前言题目描述题目分析边界问题的考虑岛屿是否被淹没判断:如何寻找联通块: 代码预告 前言 之前我们介绍了 bfs算法在二维,三维地图中的应用,现在我们接续进行拓展,解锁floodfill 算…...

GetQzonehistory:3步搞定QQ空间历史说说备份的终极方案
GetQzonehistory:3步搞定QQ空间历史说说备份的终极方案 【免费下载链接】GetQzonehistory 获取QQ空间发布的历史说说 项目地址: https://gitcode.com/GitHub_Trending/ge/GetQzonehistory 你是否曾想过要备份自己在QQ空间发布的那些珍贵回忆?那些…...
:当TTS调用量突破500万/月,这3个架构断层将触发收入增长断崖)
ElevenLabs商业规模化陷阱(内部白皮书节选):当TTS调用量突破500万/月,这3个架构断层将触发收入增长断崖
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs Growing Business ElevenLabs 已从语音合成初创公司快速演进为全球 AI 语音基础设施的关键提供者,其业务增长体现在 API 调用量年增超 320%、企业客户数突破 12,000 家ÿ…...

前端开发者福音:用Vue.js开发的Beekeeper Studio,如何让SQL开发体验更‘现代’?
Vue.js与SQL工具的现代融合:Beekeeper Studio如何重塑开发者体验 当SQL开发者第一次打开Beekeeper Studio时,那种流畅的界面过渡和即时的语法补全反馈会让人误以为在使用一个现代Web应用——这恰恰是Vue.js赋予桌面应用的魔力。作为一款基于Electron和Vu…...
)
告别混乱搜索:一文搞懂Quartus前仿真的两种玩法(Modelsim调用 vs VWF内嵌)
Quartus前仿真实战指南:Modelsim与VWF的高效选择策略 从Verilog到可靠仿真的关键跨越 当你完成了一段Verilog代码的编写,那种成就感往往伴随着一个迫切的需求:如何快速验证这段代码的行为是否符合预期?在Quartus开发环境中&#x…...

ensp关闭完美世界运行时显示权限不够
Windows PowerShell 版权所有(C) Microsoft Corporation。保留所有权利。安装最新的 PowerShell,了解新功能和改进!https://aka.ms/PSWindowsPS C:\Users\Administrator> net stop MessageTransfer 发生系统错误 5。拒绝访问。…...

可解释AI评估指南:从原型纯度到TCAV分数的量化度量体系
1. 项目概述:为什么我们需要量化评估可解释AI?在人工智能,尤其是深度学习模型日益渗透到医疗诊断、自动驾驶、金融风控等关键领域的今天,一个核心的信任危机始终悬而未决:我们如何相信一个“黑箱”模型做出的决策&…...

地下水位监测仪:实现深井水位远程自动观测
设备是什么地下水位监测仪是一种用于测量地下水、矿山井或地热井中水位高度的仪器。它采用投入式探头设计,基于静水压力原理工作:当传感器探头固定在水下某一点时,通过感知该点上方水柱产生的压力,结合安装高程,即可换…...

动手写一个 JVM 调优学习项目:6 个真实场景带你掌握性能优化
动手写一个 JVM 调优学习项目:6 个真实场景带你掌握性能优化 项目地址: https://gitee.com/jiucenglou/jvm-tuning-lab 技术栈: Java 8 Maven 适合人群: Java 开发者、性能调优初学者、面试准备者 🤔 为什么写这个项目? 在实际开发和面试中…...


3步解锁网易云音乐NCM文件:ncmdump让你的音乐自由播放
3步解锁网易云音乐NCM文件:ncmdump让你的音乐自由播放 【免费下载链接】ncmdump 项目地址: https://gitcode.com/gh_mirrors/ncmd/ncmdump 还在为网易云音乐下载的加密NCM文件无法在其他设备播放而烦恼吗?ncmdump作为一款专业的网易云音乐NCM文件…...