SLAM从入门到精通(消息传递)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】
前面我们只是编写了一个publisher节点,以及一个subscribe节点。有了这两个节点,它们之间就可以通信了。在实际生产中,我们除了简单的通信之外,要传递的数据可能还有很多。这个时候,我们就要构建一个消息体。这个消息体可以是各种脚本,但需要同时能被publisher和subscribe访问到。幸好,ros给我们提供了这样的一种形式。
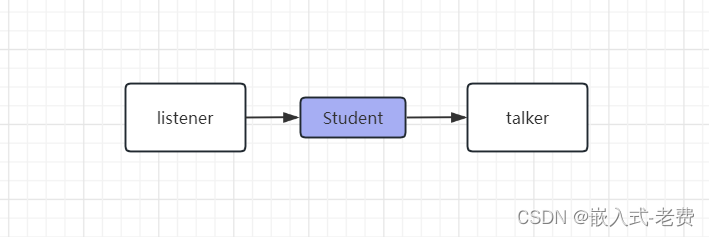
1、构建消息体
在package下面创建一个msg文件夹。文件夹中保存一个Student.msg文件,它的内容如下所示,
string name
float64 height
float64 weight这个文件其实只是一个脚本。通过在workspace顶层输入catkin_make,就可以生成对应的头文件Student.h。注意,头文件保存的位置位于./devel/include/beginner_tutorials/Student.h。编译之前也要修改下CMakelists.txt文件,如下面2所示。
2、修改CMakelists.txt文件
cmake_minimum_required(VERSION 2.8.3)
project(beginner_tutorials)## Find catkin and any catkin packages
find_package(catkin REQUIRED COMPONENTS message_generation roscpp rospy std_msgs genmsg)add_message_files(FILES Student.msg)## Declare ROS messages and services
#add_message_files(FILES Num.msg)
#add_service_files(FILES AddTwoInts.srv)## Generate added messages and services
generate_messages(DEPENDENCIES std_msgs)## Declare a catkin package
catkin_package()## Build talker and listener
include_directories(include ${catkin_INCLUDE_DIRS})add_executable(talker src/talker.cpp)
target_link_libraries(talker ${catkin_LIBRARIES})
add_dependencies(talker beginner_tutorials_generate_messages_cpp)add_executable(listener src/listener.cpp)
target_link_libraries(listener ${catkin_LIBRARIES})
add_dependencies(listener beginner_tutorials_generate_messages_cpp)
3、重新构建talker.cpp文件
#include "ros/ros.h"
#include "beginner_tutorials/Student.h"
#include <cstdlib>using namespace std;int main(int argc, char* argv[])
{ros::init(argc, argv, "node_MyMsgPub");if(argc!=4){cout << "Error command parameter!\n" \"Please run command eg:\n" \"rosrun begin_tutorials talker LiLei 180 160" << endl;return 1;}ros::NodeHandle nh;ros::Publisher MyMsgPub = nh.advertise<beginner_tutorials::Student>("MyMsg", 100);beginner_tutorials::Student sdtMsg;sdtMsg.name = argv[1];sdtMsg.height = atof(argv[2]);sdtMsg.weight = atof(argv[3]);ros::Rate rate(10);while(ros::ok()){MyMsgPub.publish(sdtMsg);rate.sleep();}return 0;
}
代码大部分和之前差不多,只要注意beginner_tutorials::Student这个结构体即可。
4、重新构建listener.cpp文件
#include "ros/ros.h"
#include "beginner_tutorials/Student.h"void MyMsgCallback(const beginner_tutorials::Student& sdtInfo)
{ROS_INFO("Thestudent information is:\n""name:%s--height:%f--weight:%f\n",sdtInfo.name.c_str(),sdtInfo.height,sdtInfo.weight);
}int main(int argc, char* argv[])
{ros::init(argc, argv, "node_MyMsgSub");ros::NodeHandle nh;ros::Subscriber MyMsgSub = nh.subscribe("MyMsg", 1000, &MyMsgCallback);ros::spin();return 0;
}
和talker.cpp一样,代码中只需要关注下beginner_tutorials::Student这个结构体就行。
5、顶层编译
cd到workspace的顶层,直接输入catkin_make即可。
6、准备运行talker和listener节点
在运行talker和listener节点之前,有两件事情要做。第一步,打开roscore;第二步,source ./dev/setup.sh文件。最后,分别打开talker和listenner即可。
rosrun beginner_tutorials talker LiLei 180 160
rosrun beginner_tutorials listener没什么意外的化,你会看到这样的打印。如果能看到这些打印,基本上说明我们已经学会使用了ros的消息功能。
[ INFO] [1695351213.590856004]: Thestudent information is:
name:LiLei--height:180.000000--weight:160.000000[ INFO] [1695351213.692688848]: Thestudent information is:
name:LiLei--height:180.000000--weight:160.000000[ INFO] [1695351213.791460924]: Thestudent information is:
name:LiLei--height:180.000000--weight:160.000000[ INFO] [1695351213.891075380]: Thestudent information is:
name:LiLei--height:180.000000--weight:160.000000[ INFO] [1695351213.990753652]: Thestudent information is:
name:LiLei--height:180.000000--weight:160.000000[ INFO] [1695351214.090438037]: Thestudent information is:
name:LiLei--height:180.000000--weight:160.000000[ INFO] [1695351214.190497066]: Thestudent information is:
name:LiLei--height:180.000000--weight:160.000000[ INFO] [1695351214.291007141]: Thestudent information is:
name:LiLei--height:180.000000--weight:160.000000[ INFO] [1695351214.390375087]: Thestudent information is:
name:LiLei--height:180.000000--weight:160.000000[ INFO] [1695351214.490385779]: Thestudent information is:
name:LiLei--height:180.000000--weight:160.000000相关文章:
SLAM从入门到精通(消息传递)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing 163.com】 前面我们只是编写了一个publisher节点,以及一个subscribe节点。有了这两个节点,它们之间就可以通信了。在实际生产中&#…...

思科路由器:NAT的基础配置
一直以来,对于华为、H3C、锐捷交换机的命令配置,不断的有朋友留言,三家交换机的配置命令容易弄混,经常在实际项目配置中出错,因此,找几个基础的示例来练练。 R1配置 Router>en Router>enable Rout…...

动态代理。
无侵入式的给代码增加额外的功能 代理的作用:对象如果干的事情太繁琐,就可以通过代理来转移部分职责;也就是相当于把对象的的方法拆开一些步骤分给代理做,对象做关键的就行了;并且代理做的这些繁琐的事情的名字也要和…...
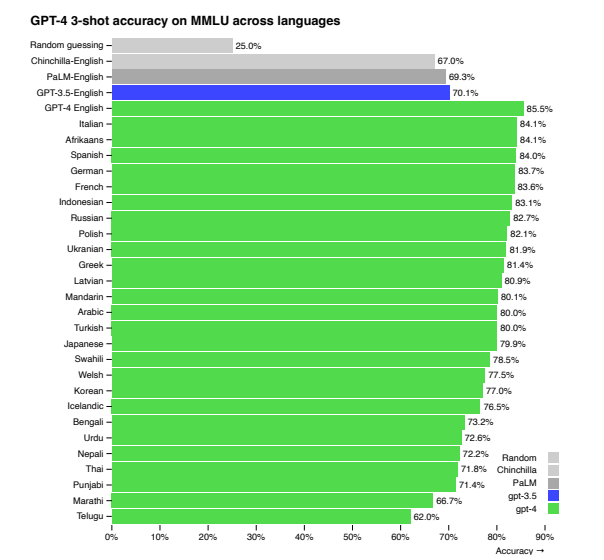
Learn Prompt-GPT-4:能力
GPT-4能力大赏 常识知识推理 一个猎人向南走了一英里,向东走了一英里,向北走了一英里,最后回到了起点。他看到了一只熊,于是开枪打了它。这只熊是什么颜色的? 答案是白色,因为这种情况只可能发生在北…...

iOS——ViewController的生命周期
ViewController ViewController的生命周期是指在应用程序运行过程中,ViewController实例从创建到销毁的整个过程。在这个过程中,ViewController会经历一系列的生命周期方法,这些方法可以帮助开发者管理ViewController及其相关的视图和逻辑。…...

SkyWalking内置参数与方法
参数 全局指标 指标指标名称all_p99所有服务响应时间的 p99 值all_p95所有服务响应时间的 p95 值all_p90所有服务响应时间的 p90 值all_p75所有服务响应时间的 p75 值all_p70所有服务响应时间的 p70 值all_heatmap所有服务响应时间的热点图 服务指标 指标指标名称service_r…...
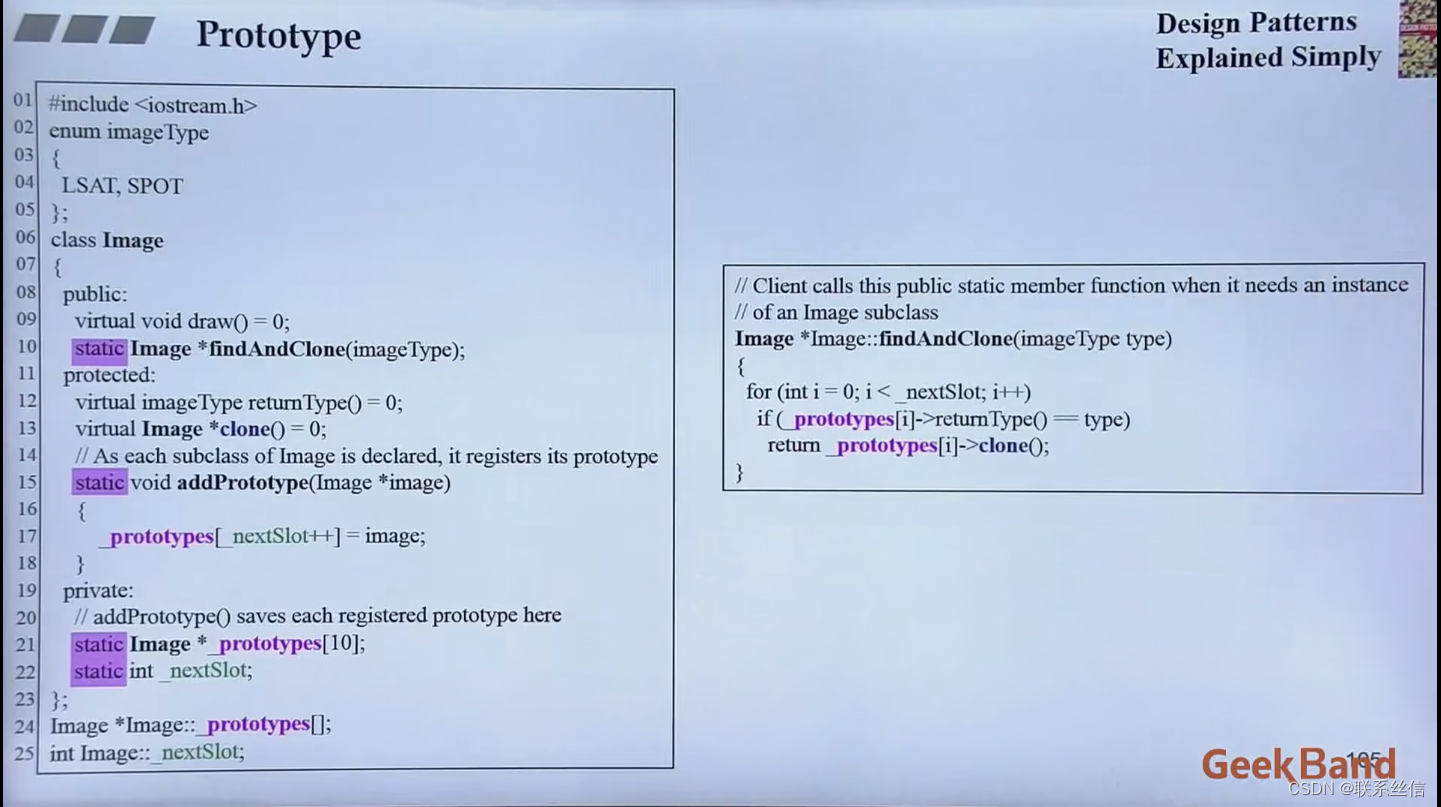
【C++面向对象侯捷】12.虚函数与多态 | 13.委托相关设计【设计模式 经典做法,类与类之间关联起来,太妙了,不断的想,不断的写代码】
文章目录 12.虚函数与多态举例:委托 继承【观察者模式】13.委托相关设计Composite 组合模式Prototype 原型模式 12.虚函数与多态 纯虚函数 一定要 子类重新定义的 继承和复合 关系下的构造和析构 举例:委托 继承【观察者模式】 13.委托相关设计 问题…...
)
基于若依ruoyi-nbcio增加flowable流程待办消息的提醒,并提供右上角的红字数字提醒(五)
1、下面提供给前端待办提醒消息的接口SysNoticeController,增加如下: /*** 补充用户数据,并返回系统消息* return*/Log(title "系统消息")GetMapping("/listByUser")public R<Map<String, Object>> listByU…...

hive数据初始化
mysql版本:3.1.3 hive版本: 8.0.31 hive连接配置 <property> <name>javax.jdo.option.ConnectionURL</name> <value>jdbc:mysql://node88:3306/hive?createDatabaseIfNotExisttrue</value> </pr…...
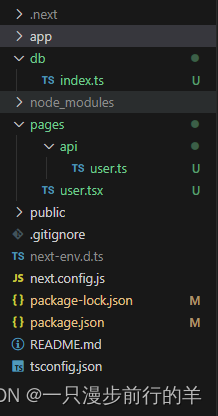
React+Node——next.js 构建前后端项目
一、安装全局依赖 npm i -g create-next-app二、创建next项目 create-next-app react-next-demo //或 create-next-app react-next-demo --typescript三、加载mysql依赖 npm i -S mysql2四、运行项目 npm run dev五、创建db文件目录,目录下创建index.ts import…...

CRM系统主要包括哪些功能?
CRM系统应该要包括的功能总结为3大方向—— 核心必须要具备的功能常见尽量要有的功能可选有了自然更好的功能 以我们公司用的简道云CRM系统模板为例:https://www.jiandaoyun.com 01 核心必须要具备的功能 核心功能决定了系统是否能够被纳入CRM类别,这些…...
Nginx location 精准匹配URL = /
Location是什么? Location是Nginx中的块级指令(block directive),通过配置Location指令块,可以决定客户端发过来的请求URI如何处理(是映射到本地文件还是转发出去)及被哪个location处理。 匹配模式 分为两种模式&…...

使用JAXB将Java对象转xml
文章目录 使用JAXB将Java对象转xml1. 要求生成的xml2. Java对象3. 封装的工具类4. 测试 使用JAXB将Java对象转xml 1. 要求生成的xml <?xml version"1.0" encoding"UTF-8" ?> <root><result status"success" msg"成功&qu…...

Atlas 200 DK开发板问题总结
1.fatal error: acl/acl.h: No such file or directory 该问题是因为在设置的DDK环境变量下找不到头文件。 解决方法: 1)输入echo $DDK,查看当前DDK地址 2)在src文件夹下找到CMakeLists.txt文件,发现该文件有一个变量名…...

uniapp——实现二维码生成+保存二维码图片——基础积累
最近在做二维码推广功能,自从2020年下半年到今天,大概有三年没有用过uniapp了,而且我之前用uniapp开发的程序还比较少,因此很多功能都浪费了很多时间去查资料,现在把功能记录一下。 这里写目录标题 效果图1.根据接口返…...
零基础学前端(六)重点讲解 JavaScript
1. 该篇适用于从零基础学习前端的小白,完全从零基础角度出发 2. 我们学习时,应该主动向自己提问?只有你能提出问题,你才算是在编程中学习进步了。 3. 初学者不懂得问题很多,在自己在不懂时,一定要求助有经验…...
数据库问题记录(粗略版)oracle、mysql等主流数据库通用
1. ORA-00918:未明确定义列 该问题情况大致为:select 所取列名错误、重复等问题。 2. “select * from temp where 10; ”的含义 布尔值为FALSE,只返回表结构,不返回数据。 举一反三: select * from temp where 1&…...

ORACLE多列中取出数据最大的一条
1.需求说明: 当查询出来的数据存在多条数据时,想按照一定条件排序取出其中一条数据。 2.使用函数: row_number() over( partition by 分组字段 order by 排序字段 desc) 3.示例: --根据table_a中的pk_house&#x…...

Xamarin.Android实现App内版本更新
目录 1、具体的效果2、代码实现2.1 基本原理2.2 开发环境2.3 具体代码2.3.1 基本设置2.3.2 系统的权限授予2.3.3 进度条的layout文件2.3.4 核心的升级文件 3、代码下载4、知识点5、参考文献 1、具体的效果 有事需要在程序内集成自动更新的功能,网上找了下ÿ…...

运维工程师面经
文章目录 前言RedisMongoDBPython中的GIL(全局解释器锁)Python算法总结 前言 本博客仅做学习笔记,如有侵权,联系后即刻更改 科普: Redis 参考网址 NoSQL技术 基于内存的数据库,并且提供一定的持久化功能…...

NotebookLM技能扩展:连接本地大模型实现智能文档处理
1. 项目概述与核心价值最近在折腾AI应用开发,特别是想把手头的本地大模型用起来,解决一些实际的文档处理问题。相信很多朋友和我一样,手头积累了大量笔记、报告、PDF文档,每次想从中快速找到特定信息或者进行归纳总结,…...

快速安装ClaudeCode完整指南
在电脑上安装 Claude Code 先安装系统环境和必要的依赖。 1、检查 Node.js 和Git是否已安装 (1)Node.js 方法 1:官网下载 访问: https://nodejs.org/zh-cn 运行安装包一路 Next 即可 方法 2:用 winget 安装 wi…...

苹果手机照片去背景怎么操作?2026年最全工具对比指南
最近有个朋友问我,怎样才能快速给iPhone拍的照片去背景,特别是想换成不同颜色的背景或者制作透明背景图。我才意识到,现在很多人其实都需要这样的功能——无论是为了制作证件照、商品图,还是用于社交媒体。今天我就把这些年用过的…...

开源爬虫框架OpenClaw深度集成Bitrix24:企业级数据自动化采集实战
1. 项目概述:当开源爬虫框架遇上企业级CRM如果你正在寻找一个能够与Bitrix24深度集成、稳定可靠且高度可定制的数据采集方案,那么rsvbitrix/openclaw-bitrix24这个开源项目绝对值得你花时间深入研究。简单来说,这是一个基于Python的爬虫框架&…...

增材制造在量子技术中的应用与挑战
1. 增材制造与量子技术的融合背景量子技术正逐步从实验室走向实际应用,这一转变对硬件系统提出了前所未有的要求。传统制造方法在面对量子设备的小型化、轻量化和复杂结构需求时显得力不从心。增材制造(Additive Manufacturing, AM)——也就是…...

为AI应用构建低成本实时搜索能力:gpt-search开源项目实战指南
1. 项目概述与核心价值最近在折腾一些AI应用开发,发现一个挺有意思的现象:很多开发者想给自己的GPT应用加上联网搜索能力,但往往卡在第一步——如何高效、稳定且低成本地获取实时网络信息。自己从零搭建一个搜索引擎爬虫?光是处理…...

ARM架构FPSID寄存器详解与应用场景
1. ARM浮点系统ID寄存器(FPSID)概述在ARM架构的浮点运算单元(FPU)和Advanced SIMD扩展中,FPSID(Floating-Point System ID Register)是一个关键的识别寄存器。这个32位寄存器包含了实现者代码、子架构版本、部件编号等关键信息,相当于浮点单元的"身…...

设备树和api 关系
// 包含头文件(定义宏和常量) #include <dt-bindings/interrupt-controller/arm-gic.h> #include <dt-bindings/gpio/gpio.h> #include <dt-bindings/clock/stm32mp1-clks.h> #include <dt-bindings/reset/stm32mp1-resets.h>/ …...

如何在macOS上轻松运行Windows程序?Whisky完整指南教程
如何在macOS上轻松运行Windows程序?Whisky完整指南教程 【免费下载链接】Whisky A modern Wine wrapper for macOS built with SwiftUI 项目地址: https://gitcode.com/gh_mirrors/wh/Whisky 想在macOS上运行Windows专属软件却不想安装虚拟机?Whi…...

RocketMQ 入门到原理实战全讲明白了!第二章
文章目录1、客户端消息确认机制2、广播模式详解3、消息过滤机制4、顺序消息机制5、延迟消息、批量消息6、事务消息机制7、ACL 权限控制机制8、SpringBoot 整合 RocketMQ9、RocketMQ 客户端注意事项10、MQ 如何保证消息不丢失11、MQ 如何保证消息的顺序性12、MQ 如何保证消息的幂…...