《计算机视觉中的多视图几何》笔记(12)
12 Structure Computation
本章讲述如何在已知基本矩阵 F F F和两幅图像中若干对对应点 x ↔ x ′ x \leftrightarrow x' x↔x′的情况下计算三维空间点 X X X的位置。
文章目录
- 12 Structure Computation
- 12.1 Problem statement
- 12.2 Linear triangulation methods
- 12.3 Geometric error cost function
- 12.4 Sampson approximation (first-order geometric correction)
- 12.5 An optimal solution
- 12.5.1 Reformulation of the minimization problem
- 12.5.2 Details of the minimization
- 12.5.3 Local minima
- 12.5.4 Evaluation on real images
- 12.6 Probability distribution of the estimated 3D point
- 12.7 Line Reconstruction
12.1 Problem statement
我们假设已知摄像机矩阵 P P P和 P ′ P' P′,基本矩阵 F F F,还有两幅图像中若干对对应点 x ↔ x ′ x \leftrightarrow x' x↔x′。因为有噪声的存在,图像中的点反投影回去的两条射线不一定相交, x F x ′ xFx' xFx′也不一定等于0,所以简单三角化不一定可行。
我们先回忆一下第10章三维重建的知识。我们介绍了好几种不同种类的三维重建,这取决于我们对摄像机矩阵的知晓程度。那么结合本章的三角化,我们希望三角化在不同种类的重建之间能给出同样的结果。我们首先用 τ \tau τ来代表三角化的过程,如果 τ \tau τ能满足下式,那么我们就说三角化在变换 H H H下是不变的:
τ ( x , x ′ , P , P ′ ) = H − 1 τ ( x , x ′ , P H − 1 , P ′ H − 1 ) \tau(x,x',P,P') = H^{-1}\tau(x,x',PH^{-1},P'H^{-1}) τ(x,x′,P,P′)=H−1τ(x,x′,PH−1,P′H−1)
为什么需要讨论这个?这是因为我们首先需要确定三维重建的种类,才能决定优化目标的形式。如果我们只知道摄像机矩阵是一个projective matrix,那么我们就不能在三维空间最优化目标函数。因为这样的优化函数在投影变换中不能给出唯一的结果,因为距离和垂直度等概念在projective geometry的背景下无效。所以,本章给出的三角化方法优化的是二维图像上的距离,所以本章的方法在投影变换(projective transformation)中是不变的。

12.2 Linear triangulation methods
对于两幅图像,我们分别有 x = P X , x ′ = P X ′ x=PX,x'=PX' x=PX,x′=PX′,我们可以将第一个方程改成 x × P X = 0 x \times PX=0 x×PX=0,第二幅图也一样。我们继续改写就可以有 A X = 0 AX=0 AX=0。
Homogeneous method 找出 A A A最小特征值对应的特征向量
Inhomogeneous method 参见4.1.2节,原书P90
讨论
Inhomogeneous method假设点不在无穷远处,不适合projective reconstruction。其实这两个方法都不适合。
Inhomogeneous method适合affine reconstruction。
Homogeneous method不适合affine reconstruction。
12.3 Geometric error cost function

由于图像中有噪声的存在, x ↔ x ′ x \leftrightarrow x' x↔x′其实不能满足极线的约束,我们用 x ˉ , x ′ ˉ \bar{x},\bar{x'} xˉ,x′ˉ表示没有噪声的点。那么我们可以构建以下优化函数:
C ( x , x ′ ) = d ( x , x ^ ) 2 + d ( x ′ , x ^ ′ ) 2 s u b j e c t t o x ′ ^ T F x ^ = 0 C(x,x') = d(x,\hat{x})^2 + d(x',\hat{x}')^2 \\ subject \ to \ \hat{x'}^{T}F\hat{x} = 0 C(x,x′)=d(x,x^)2+d(x′,x^′)2subject to x′^TFx^=0
其中 d d d表示两点之间的欧氏距离。这相当于最小化点 X X X的重投影误差,该点 X X X通过与 F F F一致的投影矩阵映射到两个点,如图12.2。
12.4 Sampson approximation (first-order geometric correction)

我们定义 X X X与 X ^ \hat{X} X^之间的差为 δ X \delta_X δX:
δ X = − J T ( J J T ) − 1 ϵ \delta_X = -J^T(JJ^T)^{-1} \epsilon δX=−JT(JJT)−1ϵ
其中
ϵ = x ′ T F x J = ∂ ϵ / ∂ x = [ ( F T x ′ ) 1 , ( F T x ′ ) 2 , ( F X ) 1 , ( F X ) 2 ] \epsilon = x'^{T}Fx \\ J = \partial \epsilon/ \partial x=[(F^{T}x')_{1}, (F^{T}x')_{2},(FX)_{1},(FX)_{2}] ϵ=x′TFxJ=∂ϵ/∂x=[(FTx′)1,(FTx′)2,(FX)1,(FX)2]
其中 ( F T x ′ ) 1 = f 11 x ′ + f 21 y ′ + f 31 (F^{T}x')_{1}=f_{11}x'+f_{21}y'+f_{31} (FTx′)1=f11x′+f21y′+f31,以此类推。
所以我们可以看出该差值其实是基本矩阵方程关于 x x x的导数
那么 X X X和 X ^ \hat{X} X^之间的关系可以写成:
X ^ = X + δ X \hat{X} = X + \delta_X X^=X+δX
我们只需要把 δ X \delta_X δX算出来,然后对计算出的理论点 X X X按照上式进行一个纠正就可以了。

12.5 An optimal solution
本节介绍一种可以找到全局最优解的优化函数,并且是非迭代的,我们同时假设噪声服从高斯分布。
12.5.1 Reformulation of the minimization problem
先对问题进行一个梳理。
我们知道第一幅图的极点一定在极线上,第二幅图的极点也满足这个性质。反过来,在极线上的点也满足基本矩阵的约束。那么就能让观测到的点尽可能靠近极线,也就是找观测点到极线的距离,并使其最小。
所以我们就可以构建出以下损失函数
d ( x , l ) 2 + d ( x ′ + l ′ ) 2 d(x,l)^2 + d(x'+l')^2 d(x,l)2+d(x′+l′)2
我们的策略如下:
- 将极线方程参数化,所以第一幅图像中的极线方程就可以写为 l ( t ) l(t) l(t)
- 利用基本矩阵 F F F,和 l ( t ) l(t) l(t)来计算第二幅图像中的极线l ′ ( t ) '(t) ′(t)
- 将损失函数写成 d ( x , l ( t ) ) 2 + d ( x ′ + l ′ ( t ) ) 2 d(x,l(t))^2 + d(x'+l'(t))^2 d(x,l(t))2+d(x′+l′(t))2
- 求解最优的 t t t
12.5.2 Details of the minimization
接下来我们讲一下需要注意的一些细节。
首先,两幅图中对应点都不能与极点重合。
并且,我们可以对两幅图都做一个刚体变换,那么 x , x ′ x,x' x,x′就可以被放置在原点 ( 0 , 0 , 1 ) (0,0,1) (0,0,1),那么两幅图的极点分别是 ( 1 , 0 , f ) , ( 1 , 0 , f ′ ) (1,0,f),(1,0,f') (1,0,f),(1,0,f′)。我们知道极点也是要满足 F F F的,所以我们有 F ( 1 , 0 , f ) T = ( 1 , 0 , f ′ ) F = 0 F(1,0,f)^T = (1,0,f')F = 0 F(1,0,f)T=(1,0,f′)F=0,如此以来我们就可以把基本矩阵表示为一种特殊形式:
F = [ f f ′ d − f ′ c − f ′ d − f b a b − f d c d ] F = \left[ \begin{matrix} ff'd & -f'c & -f'd \\ -fb & a & b\\ -fd & c & d \\ \end{matrix} \right] F= ff′d−fb−fd−f′cac−f′dbd
同时我们也知道极线会通过极点 ( 1 , 0 , f ) (1,0,f) (1,0,f),我们再找一个特殊点,那就是极线与 y y y轴的交点 ( 0 , t , 1 ) (0,t,1) (0,t,1),所以极线就可以写成 ( 1 , 0 , f ) × ( 0 , t , 1 ) = ( t f , 1 , − t ) (1,0,f) \times (0,t,1) = (tf,1,-t) (1,0,f)×(0,t,1)=(tf,1,−t),那么该直线到原点的距离就是:
d ( x , l ( t ) ) 2 = t 2 1 + ( t f ) 2 d(x,l(t))^2 = \frac{t^2}{1+(tf)^2} d(x,l(t))2=1+(tf)2t2
紧接着我们找下一个极线:
l ′ ( t ) = F ( 0 , t , 1 ) T = ( − f ′ ( c t + d ) , a t + b , c t + d ) T l'(t) = F(0,t,1)T=(-f'(ct+d),at+b,ct+d)^T l′(t)=F(0,t,1)T=(−f′(ct+d),at+b,ct+d)T
该极线到原点的距离:
d ( x ′ , l ′ ( t ) ) 2 = ( c t + d ) 2 ( a t + v ) 2 + f ′ 2 ( c t + d ) 2 d(x',l'(t))^2 = \frac{(ct+d)^2}{(at+v)^2 +f'^2(ct+d)^2} d(x′,l′(t))2=(at+v)2+f′2(ct+d)2(ct+d)2
于是我们把 d ( x ′ , l ′ ( t ) ) 2 , d ( x , l ( t ) ) 2 d(x',l'(t))^2, d(x,l(t))^2 d(x′,l′(t))2,d(x,l(t))2 加在一起,记为 s ( t ) s(t) s(t)求导数,令导数等于0,就可以了。
一些讨论 s ( t ) s(t) s(t)是6次多项式,那么它就有6个实根,对应于3个最小值和3个最大值。顺便别忘了检查 x → ∞ x \rightarrow \infty x→∞的情况。
下面我们把整个算法流程重复一遍,对应于P318算法12.1。
算法输入:观测到的对应点 x ↔ x ′ x \leftrightarrow x' x↔x′,基本矩阵 F F F
算法输出:寻找一对 x ^ ↔ x ^ ′ \hat{x} \leftrightarrow \hat{x}' x^↔x^′可以使几何损失函数最小,同时这一对点满足 x ^ ′ T F x ^ = 0 \hat{x}'^{T}F\hat{x} = 0 x^′TFx^=0
算法步骤:
-
定义一对转换矩阵,可以把 x = ( x , y , 1 ) T , x ′ = ( x ′ , y ′ , t ) T x=(x,y,1)^{T},x'=(x',y',t)^{T} x=(x,y,1)T,x′=(x′,y′,t)T转换到原点
T = [ 1 − x 1 − y 1 ] T=\left[ \begin{matrix} 1 & & -x \\ &1 & -y \\ & & 1\\ \end{matrix} \right] T= 11−x−y1 T ′ T' T′的形式与 T T T是类似的
-
将基本矩阵 F F F变成 T ′ − T F T − 1 T'^{-T}FT^{-1} T′−TFT−1
-
计算左极点 e = ( e 1 , e 2 , e 3 ) e=(e_1,e_2,e_3) e=(e1,e2,e3)和右极点 e ′ = ( e 1 ′ , e 2 ′ , e 3 ′ ) e'=(e'_1,e'_2,e'_3) e′=(e1′,e2′,e3′),并且归一化,使得 e 1 + e 2 = 1 e_1+e_2=1 e1+e2=1
-
构造两个旋转矩阵,这两个矩阵可以把 e e e旋转到 ( 1 , 0 , e 3 ) (1,0,e_3) (1,0,e3) ( 1 , 0 , e 3 ′ ) (1,0,e'_3) (1,0,e3′).
R = [ e 1 e 2 − e 2 e 1 1 ] R=\left[ \begin{matrix} e_1 &e_2 & \\ -e_2 &e_1 & \\ & & 1\\ \end{matrix} \right] R= e1−e2e2e11
R ′ R' R′与 R R R类似 -
把 F F F改成 R ′ F R T R'FR^{T} R′FRT
-
设置以下等式 f = e 3 , f ′ = e 3 , a = F 22 , b = F 23 , c = F 32 , d = F 33 f=e_3,f'=e_3,a=F_{22},b=F_{23},c=F_{32},d=F_{33} f=e3,f′=e3,a=F22,b=F23,c=F32,d=F33
-
将第6步中的等式带入 s ( t ) s(t) s(t)中,求解t
-
对求得的解进行验证,同时检查 t → ∞ t \rightarrow \infty t→∞ 的情况
-
将 t t t带入极线方程,找到 x ^ , x ^ ′ \hat{x},\hat{x}' x^,x^′,极线知道了,观测点 x , x ′ x,x' x,x′也知道,求直线上某个点,它要满足到已知点距离最近,由于我们把 x , x ′ x,x' x,x′转到了原点,那么问题就转变成了直线上求某一点,它到原点距离最近。书中给出了一个公式,对于一个一般的直线 ( λ , μ , ν ) (\lambda, \mu, \nu) (λ,μ,ν),直线上到原点最近的点是 ( − λ ν , − μ ν , λ 2 + μ 2 ) (-\lambda \nu, -\mu \nu, \lambda^2+\mu^2) (−λν,−μν,λ2+μ2)
-
知道 x ^ , x ^ ′ \hat{x},\hat{x}' x^,x^′后,再把他们旋转到原坐标, x ^ = T − 1 R T x ^ \hat{x} = T^{-1} R^{T} \hat{x} x^=T−1RTx^ x ^ ′ = T − 1 R T x ^ ′ \hat{x}' = T^{-1} R^{T} \hat{x}' x^′=T−1RTx^′
-
可以顺便利用 x ^ , x ^ ′ \hat{x},\hat{x}' x^,x^′计算出三维空间点 X ^ \hat{X} X^(三角化,12.2)
12.5.3 Local minima
g ( t ) g(t) g(t)有6个自由度,所以它最多有三个最小值。那么如果用迭代的方法去寻找最小值,可能陷在局部最小值里出不来。
12.5.4 Evaluation on real images
本节大概展示了一些实验结果,在P320
12.6 Probability distribution of the estimated 3D point
估计三维点的概率分布。
通过两幅图像估计出来的三维空间点应该是满足一定概率分布的。其准确与否主要取决于从摄像机出发的,两条射线之间的角度。本节就对这个问题进行建模。书中为了简化这个问题,只考虑空间某平面上的点 X = ( x , y ) T X=(x,y)^T X=(x,y)T,其图像上的点分别表示为 x = f ( X ) , x ′ = f ′ ( X ) x=f(X), x'=f'(X) x=f(X),x′=f′(X), f , f ′ f,f' f,f′是 2 × 3 2 \times 3 2×3的矩阵,而不是 3 × 4 3 \times 4 3×4 如果忘了可以复习一下p175 6.4.2节
我们线考虑第一幅图像上的点 x x x,并且我们假设噪声服从均值为0,方差为 σ 2 \sigma^2 σ2的高斯分布,那么在已知 X X X的条件下 x x x的概率分布可以表示为 p ( x ∣ X ) p(x|X) p(x∣X),对第二幅图上的点 x ′ x' x′有相同的结论 p ( x ′ ∣ X ) p(x'|X) p(x′∣X)。那么当 x , x ′ x,x' x,x′已知的时候,我们可以用贝叶斯公式反推 X X X的概率分布
p ( X ∣ x , x ′ ) = p ( x , x ′ ∣ X ) p ( X ) / p ( x , x ′ ) p(X|x,x') = p(x,x'|X)p(X) / p(x,x') p(X∣x,x′)=p(x,x′∣X)p(X)/p(x,x′)
再加上 x , x ′ x,x' x,x′独立的假设,上式就可以化成
p ( X ∣ x , x ′ ) ∼ p ( x ∣ X ) p ( x ′ ∣ X ) p(X|x,x') \sim p(x|X)p(x'|X) p(X∣x,x′)∼p(x∣X)p(x′∣X)
12.7 Line Reconstruction
我们现在要重建空间中的一个线段。它在两幅图像上分别表示为 l , l ′ l, l' l,l′。我们可以把 l , l ′ l,l' l,l′反投影回去,那么他们在空间中就是两个平面 π , π ′ \pi, \pi' π,π′, 这两个平面的交点就是所求直线。我们可以形式化的表示为 π = P T l , π ′ = P ′ T l ′ \pi = P^Tl, \pi' = P'^T l' π=PTl,π′=P′Tl′,那么三维空间中的线就可以用这两个平面来表示 ( L L L是一个 2 × 4 2 \times 4 2×4的矩阵)
L = [ l T P l ′ T P ′ ] L = \left[ \begin{matrix} l^T P \\ l'^T P' \end{matrix} \right] L=[lTPl′TP′]
空间中的点 X X X在 L L L上,所以 L X = 0 LX=0 LX=0


退化的情况
如果这个直线在极平面上,那么上一节的方法就失效了,而且这样直线会和基线相交。在实际情况下,几乎要和基线相交的线也不能用以上方法来重建.
多平面相交的重建
假设有 n n n个平面,那么我们就他们像前文 L L L一样放在一起,形成一个 n × 4 n \times 4 n×4的矩阵 A A A。对 A A A做SDV分解 A = U D V T A=UDV^T A=UDVT,从 D D D中找出两个最大的特征值对应的特征向量,用他们来表示平面,也可以假设空间中直线 L L L投影到各个平面,然后计算投影直线和观测直线之间的几何损失函数,用极大似然估计求解。
相关文章:
《计算机视觉中的多视图几何》笔记(12)
12 Structure Computation 本章讲述如何在已知基本矩阵 F F F和两幅图像中若干对对应点 x ↔ x ′ x \leftrightarrow x x↔x′的情况下计算三维空间点 X X X的位置。 文章目录 12 Structure Computation12.1 Problem statement12.2 Linear triangulation methods12.3 Geomet…...
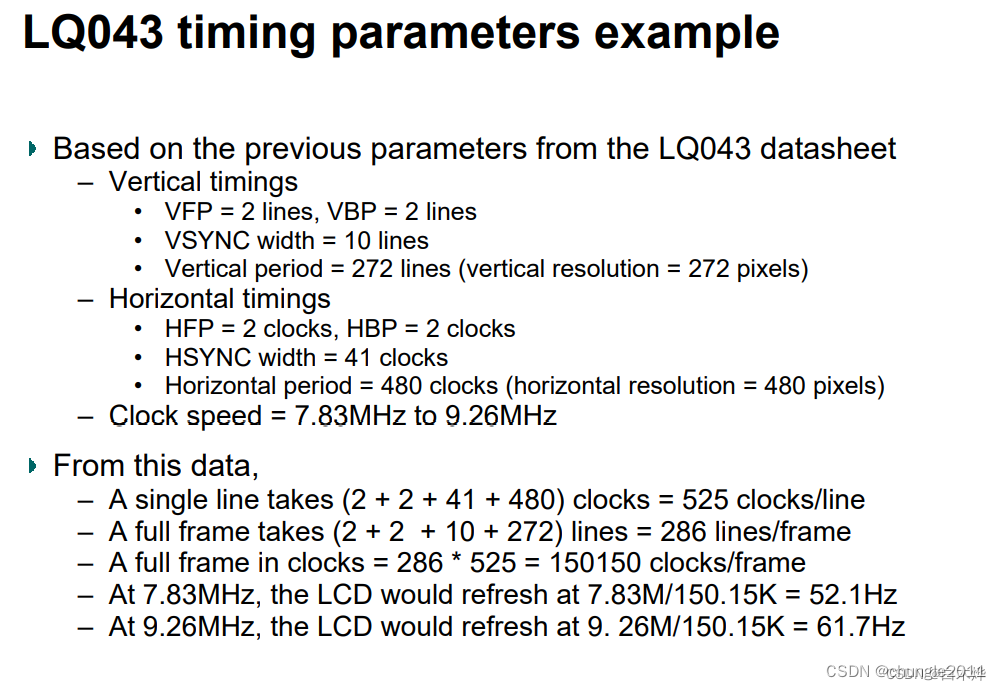
TFT LCD刷新原理及LCD时序参数总结(LCD时序,写的挺好)
cd工作原理目前不了解,日后会在博客中添加这一部分的内容。 1.LCD工作原理[1] 我对LCD的工作原理也仅仅处在了解的地步,下面基于NXP公司对LCD工作原理介绍的ppt来学习一下。 LCD(liquid crystal display,液晶显示屏) 是由液晶段阵列组成,当…...

基于Java的电影院购票系统设计与实现(源码+lw+部署文档+讲解等)
文章目录 前言具体实现截图论文参考详细视频演示为什么选择我自己的网站自己的小程序(小蔡coding)有保障的售后福利 代码参考源码获取 前言 💗博主介绍:✌全网粉丝10W,CSDN特邀作者、博客专家、CSDN新星计划导师、全栈领域优质创作…...

Linux基础指令(六)
目录 前言1. man 指令2. date 指令3. cal 指令4. bc 指令5. uname 指令结语: 前言 欢迎各位伙伴来到学习 Linux 指令的 第六天!!! 在上一篇文章 Linux基本指令(五) 中,我们通过一段故事线,带大家感性的了…...

Anderson-Darling正态性检验【重要统计工具】
Anderson-Darling正态性检验是一种用于确定数据集是否服从正态分布(也称为高斯分布或钟形曲线分布)的统计方法。它基于Anderson和Darling于1954年提出的检验统计量。该检验的基本原理和用途如下: 基本原理: 零假设(Nu…...
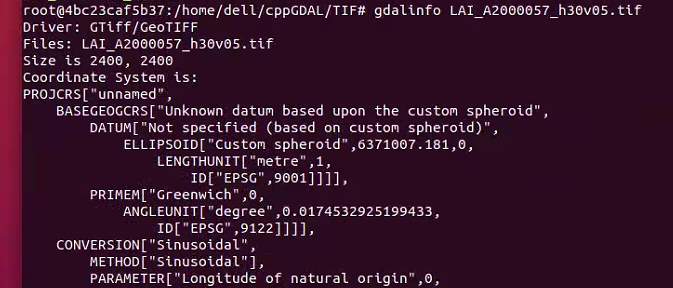
Ubuntu基于Docker快速配置GDAL的Python、C++环境
本文介绍在Linux的Ubuntu操作系统中,基于Docker快速配置Python、C等不同编程语言均可用的地理数据处理库GDAL的方法。 首先,我们访问GDAL库的Docker镜像官方网站(https://github.com/OSGeo/gdal/tree/master/docker)。其中&#x…...

<C++> 哈希表模拟实现STL_unordered_set/map
哈希表模板参数的控制 首先需要明确的是,unordered_set是K模型的容器,而unordered_map是KV模型的容器。 要想只用一份哈希表代码同时封装出K模型和KV模型的容器,我们必定要对哈希表的模板参数进行控制。 为了与原哈希表的模板参数进行区分…...

【数据结构与算法】通过双向链表和HashMap实现LRU缓存 详解
这个双向链表采用的是有伪头节点和伪尾节点的 与上一篇文章中单链表的实现不同,区别于在实例化这个链表时就初始化了的伪头节点和伪尾节点,并相互指向,在第一次添加节点时,不需要再考虑空指针指向问题了。 /*** 通过链表与HashMa…...
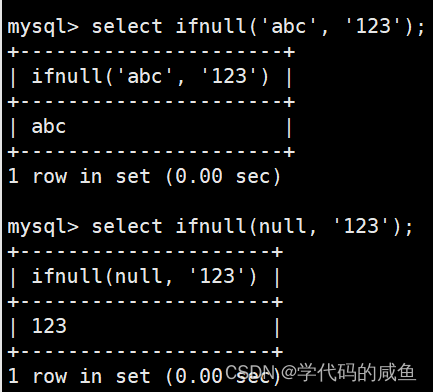
MySQL的内置函数
文章目录 1. 聚合函数2. group by子句的使用3. 日期函数4. 字符串函5. 数学函数6. 其它函数 1. 聚合函数 COUNT([DISTINCT] expr) 返回查询到的数据的数量 用SELECT COUNT(*) FROM students或者SELECT COUNT(1) FROM students也能查询总个数。 统计本次考试的数学成绩分数去…...
数据结构与算法-(7)---栈的应用-(3)表达式转换
🌈write in front🌈 🧸大家好,我是Aileen🧸.希望你看完之后,能对你有所帮助,不足请指正!共同学习交流. 🆔本文由Aileen_0v0🧸 原创 CSDN首发🐒 如…...
)
Lilliefors正态性检验(一种非参数统计方法)
Lilliefors检验(也称为Kolmogorov-Smirnov-Lilliefors检验)是一种用于检验数据是否符合正态分布的统计检验方法,它是Kolmogorov-Smirnov检验的一种变体,专门用于小样本情况。与K-S检验不同,Lilliefors检验不需要假定数…...
)
【云原生】配置Kubernetes CronJob自动备份MySQL数据库(单机版)
文章目录 每天自动备份数据库MySQL【云原生】配置Kubernetes CronJob自动备份Clickhouse数据库 每天自动备份数据库 MySQL 引用镜像:databack/mysql-backup,使用文档:https://hub.docker.com/r/databack/mysql-backup 测试、开发环境:每天0点40分执行全库备份操作,备份文…...
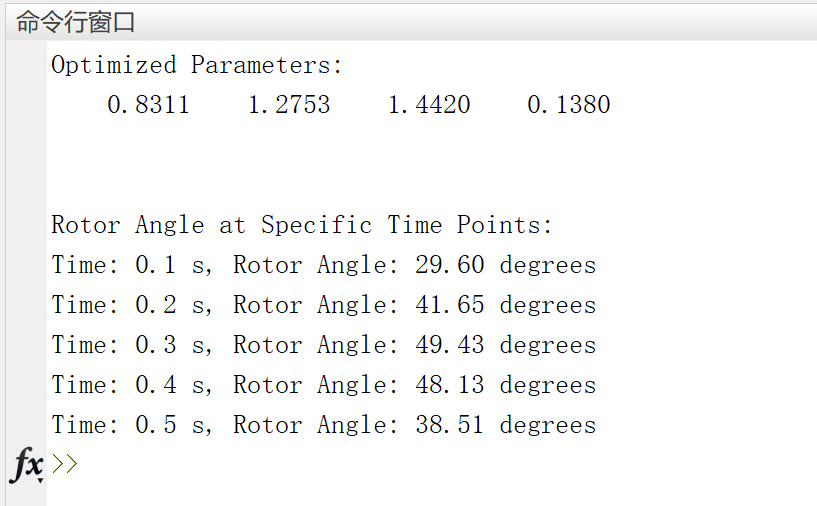
基于PSO算法的功率角摆动曲线优化研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...
)
数论知识点总结(一)
文章目录 目录 文章目录 前言 一、数论有哪些 二、题法混讲 1.素数判断,质数,筛法 2.最大公约数和最小公倍数 3.快速幂 4.约数 前言 现在针对CSP-J/S组的第一题主要都是数论,换句话说,持数论之剑,可行天下矣! 一、数论有哪些 数论 原根,素数判断,质数,筛法最大公约数…...

知识分享 钡铼网关功能介绍:使用SSLTLS 加密,保证MQTT通信安全
背景 为了使不同的设备或系统能够相互通信,让旧有系统和新的系统可以集成,通信更加灵活和可靠。以及将数据从不同的来源收集并传输到不同的目的地,实现数据的集中管理和分发。 通信网关完美克服了这一难题,485或者网口的设备能通过…...

asp.net core mvc区域路由
ASP.NET Core 区域路由(Area Routing)是一种将应用程序中的路由划分为多个区域的方式,类似于 MVC 的控制器和视图的区域划分。区域路由可以帮助开发人员更好地组织应用程序的代码和路由,并使其更易于维护。 要使用区域路由&#…...
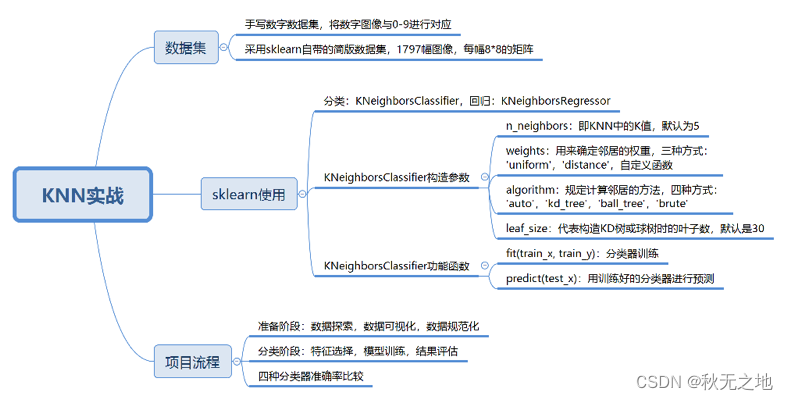
KNN(下):数据分析 | 数据挖掘 | 十大算法之一
⭐️⭐️⭐️⭐️⭐️欢迎来到我的博客⭐️⭐️⭐️⭐️⭐️ 🐴作者:秋无之地 🐴简介:CSDN爬虫、后端、大数据领域创作者。目前从事python爬虫、后端和大数据等相关工作,主要擅长领域有:爬虫、后端、大数据…...

Servlet开发-session和cookie理解案例-登录页面
项目展示 进入登录页面,输入正确的用户名和密码以后会自动跳到主页 登录成功以后打印用户名以及上次登录的时间,如果浏览器和客户端都保存有上次登录的信息,则不需要登录就可以进入主页 编码思路 1.首先提供一个登录的前端页面&…...
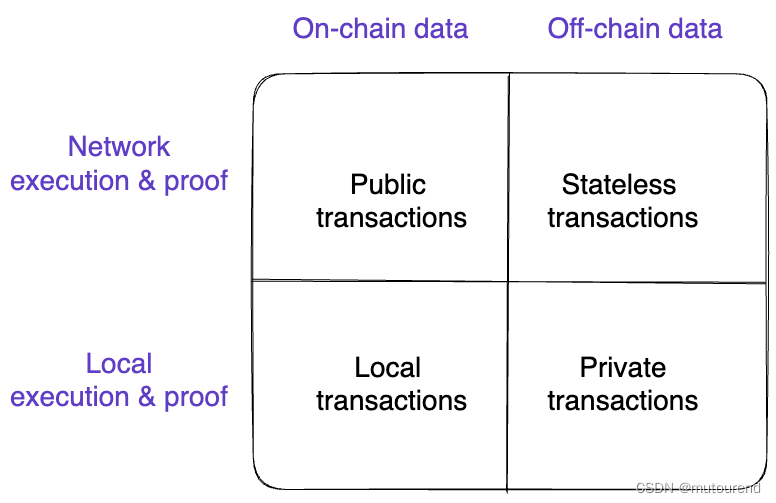
Polygon Miden:扩展以太坊功能集的ZK-optimized rollup
1. 引言 Polygon Miden定位为zkVM,定于2023年Q4上公开测试网。 zk、zkVM、zkEVM及其未来中指出,当前主要有3种类型的zkVM,括号内为其相应的指令集: mainstream(WASM, RISC-V)EVM(EVM bytecod…...

[题]宝物筛选 #单调队列优化
五、宝物筛选(洛谷P1776) 题目链接 好家伙,找到了一个之前学习多重背包优化时的错误…… 之前记的笔记还是很有用的…… #include<bits/stdc.h> using namespace std; const int N 1e5 10; int f[N]; int n, m; int v, w, s; int l…...

深度学习驱动的光谱超分辨率:技术演进与应用前景
1. 光谱超分辨率技术的前世今生 我第一次接触光谱超分辨率技术是在2015年,当时还在用传统的线性插值方法处理遥感图像。记得有次为了获取一片农田的高光谱数据,团队不得不动用昂贵的机载传感器,结果因为天气原因导致数据质量极差。正是这次经…...

郭老师-我们为什么要爱国?
我们为什么要爱国? ——因为家在,根在,魂在“你可以不爱你的管家, 但必须爱你家的房子。”🌿 国家如屋,人民为主, 执政者不过管家—— 而这屋,是我们的命脉所系。🏠 一、…...

cobalt数据库设计解析:如何平衡性能与数据完整性
cobalt数据库设计解析:如何平衡性能与数据完整性 【免费下载链接】cobalt best way to save what you love 项目地址: https://gitcode.com/GitHub_Trending/cob/cobalt 引言:数据库设计的永恒矛盾 在软件开发领域,数据库设计始终面临…...

从拒稿到录用:我的TOMM投稿实战复盘与经验分享
1. 从TMM拒稿到TOMM录用的心路历程 第一次收到TMM的拒稿邮件时,我正在实验室熬夜改代码。邮件弹出来的那一刻,整个人就像被泼了一盆冷水。那篇论文已经经历了三轮大修,每次都是几十条审稿意见,我们团队前前后后修改了上百个细节。…...

Phi-3-mini-4k-instruct-gguf多场景:覆盖个人提效、团队协作、客户支持全链路
Phi-3-mini-4k-instruct-gguf多场景:覆盖个人提效、团队协作、客户支持全链路 1. 认识Phi-3-mini-4k-instruct-gguf Phi-3-mini-4k-instruct-gguf是微软Phi-3系列中的轻量级文本生成模型GGUF版本。这个开箱即用的工具特别适合处理日常工作中的文本任务,…...

颠覆中文字体困境:思源宋体CN 7字重开源方案深度解析
颠覆中文字体困境:思源宋体CN 7字重开源方案深度解析 【免费下载链接】source-han-serif-ttf Source Han Serif TTF 项目地址: https://gitcode.com/gh_mirrors/so/source-han-serif-ttf 价值主张:破解中文字体的"三重枷锁" 在数字设计…...

Java泛型中的List
本文将详细回答java泛型中的listt extends base>使用问题。 在java中,泛型提供了强大的类型安全机制,但其一些特点也容易引起混淆,如listt extends base>开发者经常感到困难。假设sub是base的子类:public class base { }pub…...

如何打破微信单设备限制:WeChatPad终极指南
如何打破微信单设备限制:WeChatPad终极指南 【免费下载链接】WeChatPad 强制使用微信平板模式 项目地址: https://gitcode.com/gh_mirrors/we/WeChatPad 你是不是也遇到过这样的尴尬时刻?在电脑上登录微信工作,手机上的微信就被迫下线…...

编程技巧:模式切换程序框架
目录 1.模式切换程序框架 2.实现思路 3.模式切换程序框架 4.模式切换每个模式模块化流程 5.代码 Mode1.c Mode2.c Mode3.c Global.c main.c 1.模式切换程序框架 Init:进入模式前,执行一遍,用于初始化工作 Loop:执行完In…...
LumiPixel Canvas Quest人像生成中的数据结构优化实践
LumiPixel Canvas Quest人像生成中的数据结构优化实践 1. 为什么需要优化数据结构 当你用LumiPixel Canvas Quest处理大批量人像时,有没有遇到过程序变慢甚至崩溃的情况?这通常是因为图像数据在内存中的组织方式不够高效。就像整理衣柜一样,…...