项目进展(三)-电机驱动起来了,发现了很多关键点,也遇到了一些低级错误,
一、前言
昨天电机没有驱动起来,头发掉一堆,不过今天,终于终于终于把电机驱动起来了!!!!,特别开心,哈哈哈哈,后续继续努力完善!!!
二、ILIM引脚
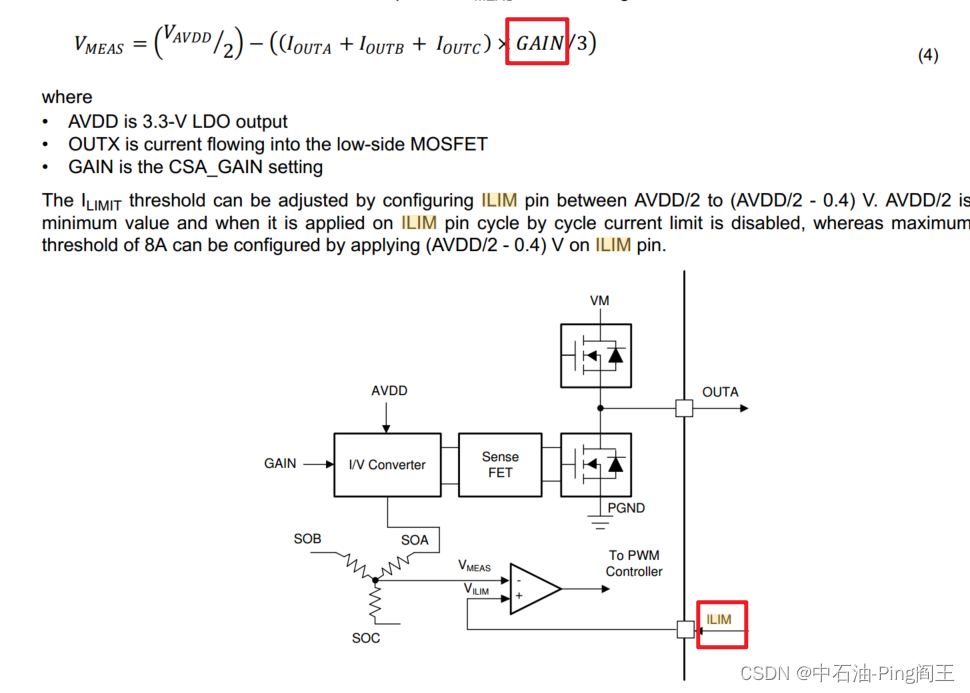
首先是在用示波器测试BRAKE引脚波形时,不小心碰触到了ILIM引脚,突然电机旋转起来了!!!所以就把问题集中在该引脚上,测试了一下示波器引脚的阻值,阻值为1MΩ,所以在R45电阻上面并联上一个1MΩ电阻(叠罗汉,哈哈哈哈),电机可以转动起来了。
后续继续叠罗汉,并联到三个1MΩ电阻,发现效果也就这样,所以不再关心阻值的问题,最终只是并联了一个250KΩ的电阻。(当然在这期间也尝试改变R44的阻值,但是效果都不理想)
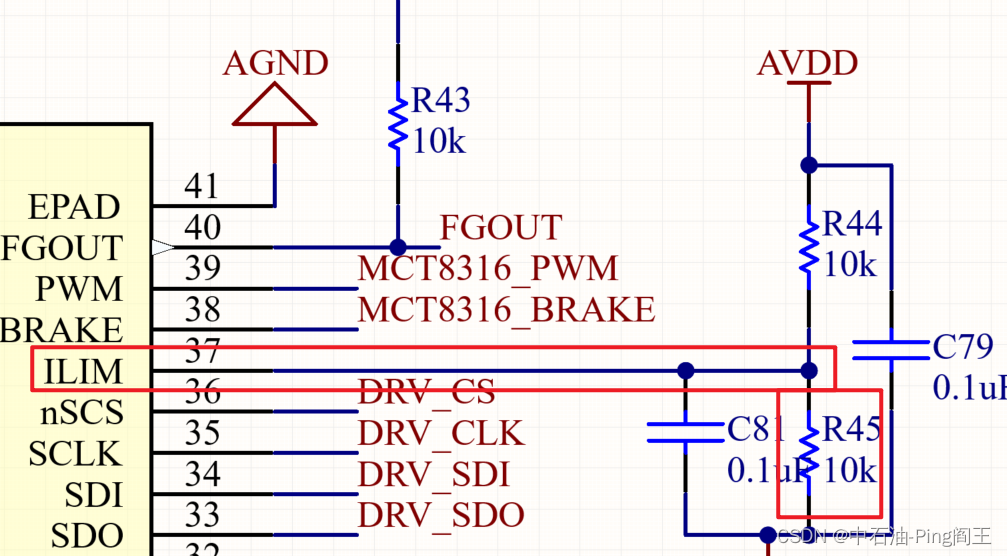
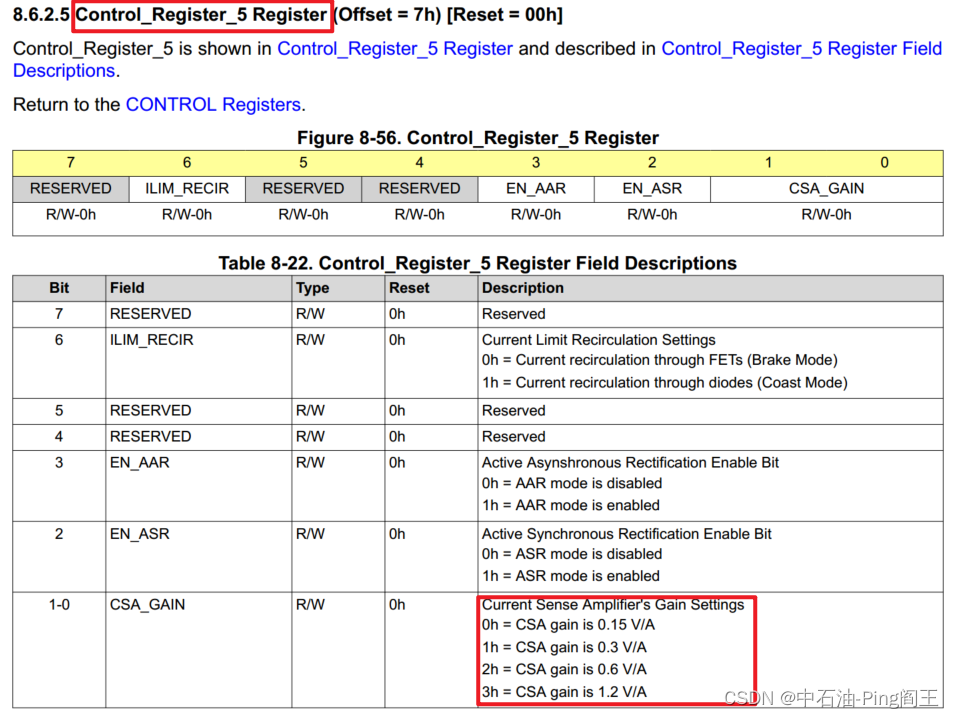
如果因为ILIM引脚电机没有旋转起来,也可以试试配置GAIN,可以挨个测试寄存器5的CSA_GAIN的值,我们当前配置的01h。
三、注意nSLEEP引脚拉高的时刻
还有一点就是,就是如上一遍博客所说"项目进展(二)-配置MCT8316ZR芯片,主要学习如何根据数据手册配置外设等",nSLEEP引脚在上电时一定要先输出低电平,等延时一会之后再将nSLEEP拉高至AVDD(上一篇博客是拉高到电源部分的3.3V,其实接到MCT8316芯片的AVDD引脚也可以)。
四、几处大坑
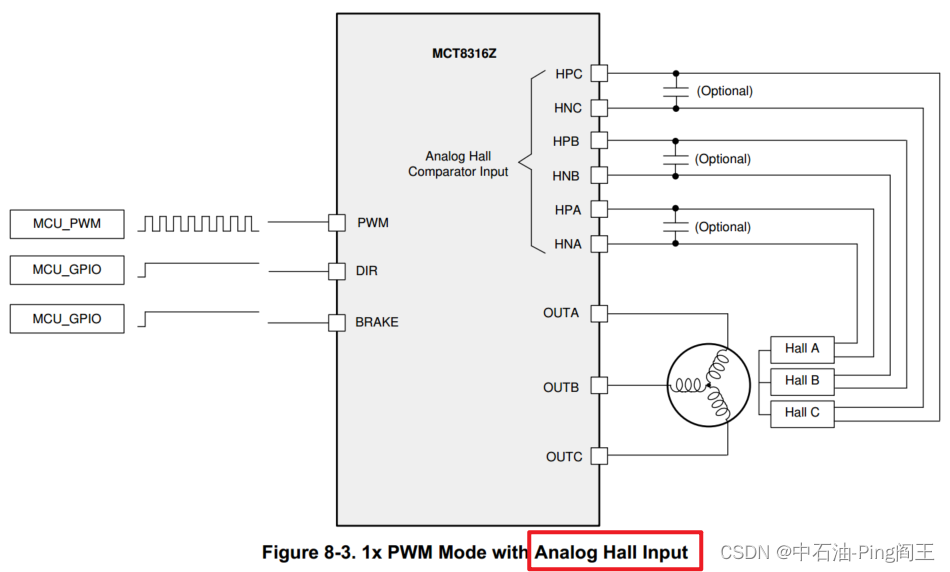
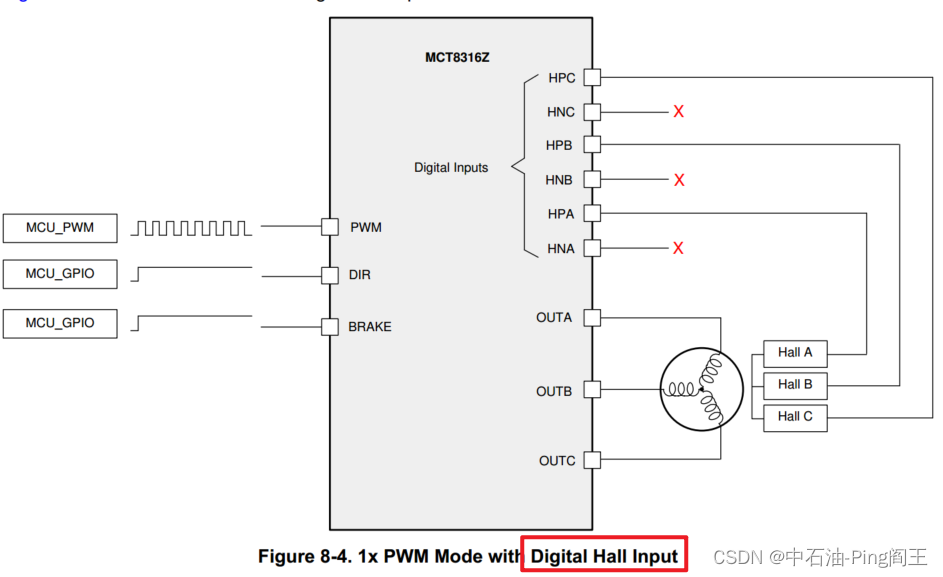
4.1 霍尔引脚配置
此外,还有上一篇博客没有提到的。一定要根据自己电机输出的霍尔信号(模拟还是数字)确定芯片的HNx引脚是悬空还是要接电容(连接HPx和HNx),我们引脚就是没有根据数据手册正确画原理图,导致最终还得把HNx跟GND断开(欲哭无泪!!!)。
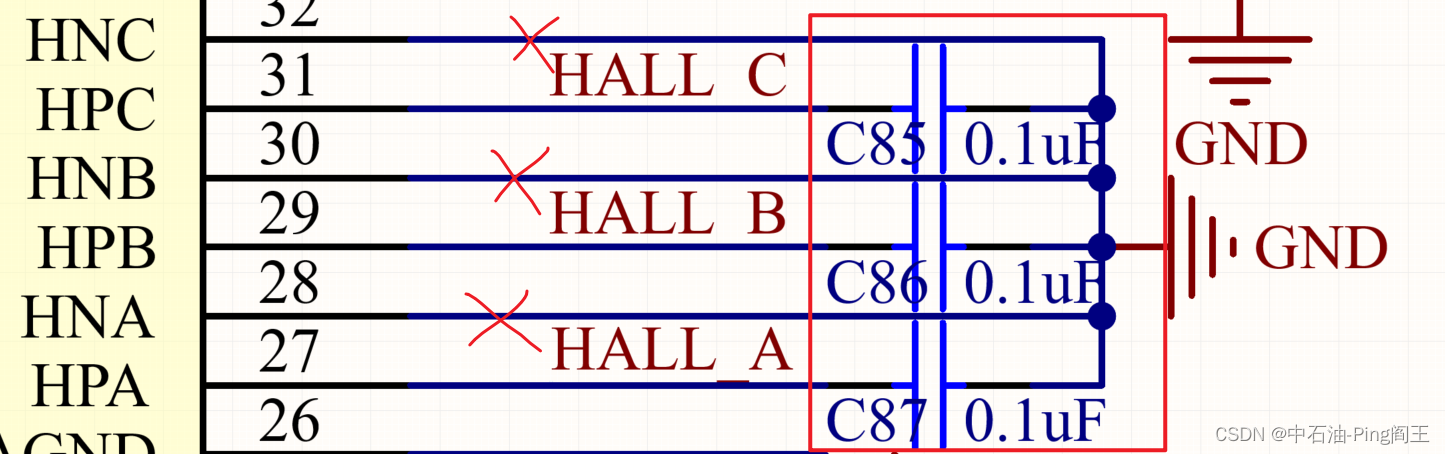
这次真的是给我很大的教训,以后设计原理图一定要仔细看数据手册:
4.2 虚焊
今天也同样测试了485芯片,在这也出现了很低级很低级很低级的错误:引脚虚焊!!!(md,以后一定得注意!!!)
4.3 PCB与电机连接线的选择
以后也要注意连接线的使用,下图的XH2.54连接线,接线处是会活动的(可能会导致跟接插口接触不好),我们就是使用8P的接线连接电机的三相和霍尔信号,有时电机旋转不正常,这个问题困扰我们好久好久,以为是配置的不好,最后发现是接触不良(大坑!!!),以后选择连接线还是要选择质量好的。

五、总结
今天的总结基本上就是这些,看似小问题也折磨了我们一整天,以后还是多注意细节问题。明天继续配置软件模拟SPI,驱动另一个电机试试。
六、往期回顾
项目进展(一)-晶振正常输出、焊接驱动芯片、查找芯片手册并学习
项目进展(二)-配置MCT8316ZR芯片,主要学习如何根据数据手册配置外设等
相关文章:
项目进展(三)-电机驱动起来了,发现了很多关键点,也遇到了一些低级错误,
一、前言 昨天电机没有驱动起来,头发掉一堆,不过今天,终于终于终于把电机驱动起来了!!!!,特别开心,哈哈哈哈,后续继续努力完善!!&…...
目标检测算法改进系列之Backbone替换为RepViT
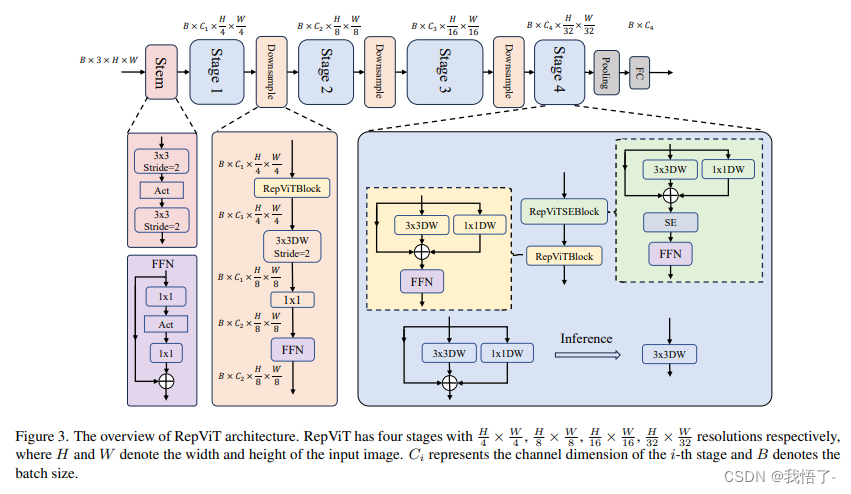
RepViT简介 轻量级模型研究一直是计算机视觉任务中的一个焦点,其目标是在降低计算成本的同时达到优秀的性能。轻量级模型与资源受限的移动设备尤其相关,使得视觉模型的边缘部署成为可能。在过去十年中,研究人员主要关注轻量级卷积神经网络&a…...

学习 Kubernetes的难点和安排
Kubernetes 技术栈的特点可以用四个字来概括,那就是“新、广、杂、深”: 1.“新”是指 Kubernetes 用到的基本上都是比较前沿、陌生的技术,而且版本升级很快,经常变来变去。 2.“广”是指 Kubernetes 涉及的应用领域很多、覆盖面非…...

【MATLAB源码-第42期】基于matlab的人民币面额识别系统(GUI)。
操作环境: MATLAB 2022a 1、算法描述 基于 MATLAB 的人民币面额识别系统设计可以分为以下步骤: 1. 数据收集与预处理 数据收集: 收集不同面额的人民币照片,如 1 元、5 元、10 元、20 元、50 元和 100 元。确保在不同环境、不…...
【软件测试】软件测试的基础概念
一、一个优秀的测试人员需要具备的素质 技能方面: 优秀的测试用例设计能力:测试用例设计能力是指,无论对于什么类型的测试,都能够设计出高效的发现缺陷,保证产品质量的优秀测试用例。这就需要我们掌握设计测试用例的方…...
Docker-mysql,redis安装
安装MySQL 下载MySQL镜像 终端运行命令 docker pull mysql:8.0.29镜像下载完成后,需要配置持久化数据到本地 这是mysql的配置文件和存储数据用的目录 切换到终端,输入命令,第一次启动MySQL容器 docker run --restartalways --name mysq…...

五种I/O模型
目录 1、阻塞IO模型2、非阻塞IO模型3、IO多路复用模型4、信号驱动IO模型5、异步IO模型总结 blockingIO - 阻塞IOnonblockingIO - 非阻塞IOIOmultiplexing - IO多路复用signaldrivenIO - 信号驱动IOasynchronousIO - 异步IO 5种模型的前4种模型为同步IO,只有异步IO模…...

用nativescript开发ios程序常用命令?
NativeScript是一个用于跨平台移动应用程序开发的开源框架,允许您使用JavaScript或TypeScript构建原生iOS和Android应用程序。以下是一些常用的NativeScript命令,用于开发iOS应用程序: 1、创建新NativeScript项目: tns create m…...
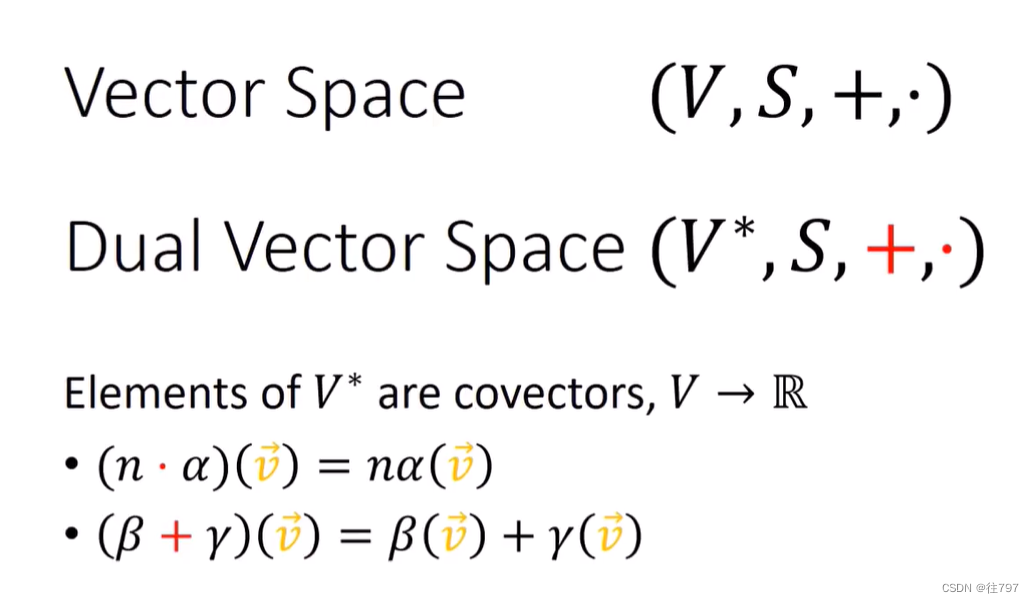
6.Tensors For Beginners-What are Convector
Covectors (协向量) What‘s a covector Covectors are “basically” Row Vectors 在一定程度上,可认为 协向量 基本上就像 行向量。 但不能简单地认为 这就是列向量进行转置! 行向量 和 列向量 是根本不同类型的对象。 …...
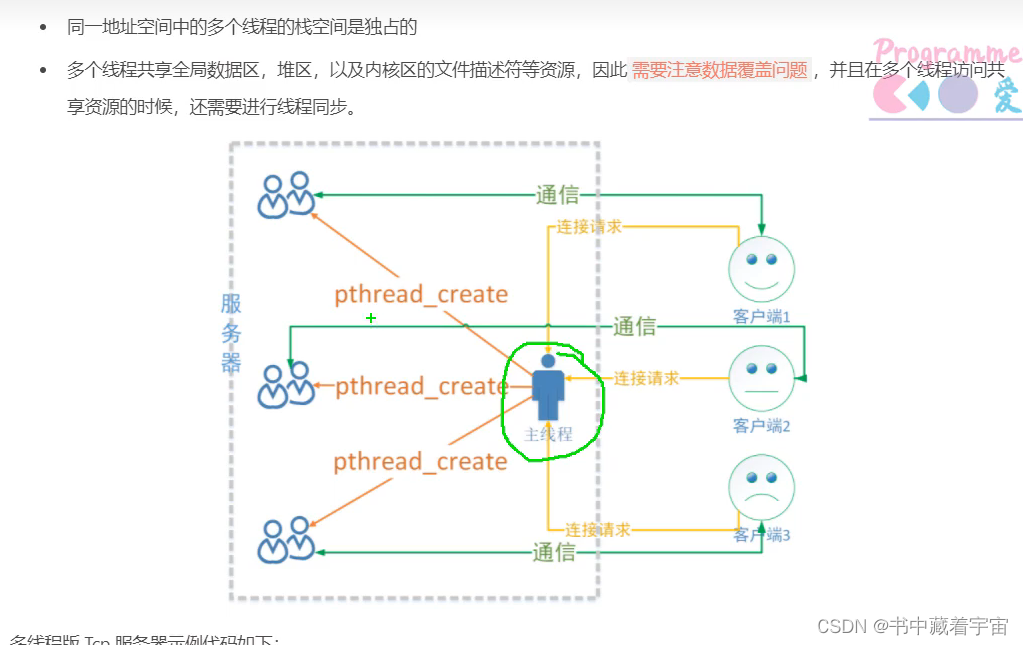
Linux多线程网络通信
思路:主线程(只有一个)建立连接,就创建子线程。子线程开始通信。 共享资源:全局数据区,堆区,内核区描述符。 线程同步不同步需要取决于线程对共享资源区的数据的操作,如果是只读就不…...

矩阵的c++实现(2)
上一次我们了解了矩阵的运算和如何使用矩阵解决斐波那契数列,这一次我们多看看例题,了解什么情况下用矩阵比较合适。 先看例题 1.洛谷P1939 【模板】矩阵加速(数列) 模板题应该很简单。 补:1<n<10^9 10^9肯定…...

RPC 框架之Thrift入门(一)
📋 个人简介 💖 作者简介:大家好,我是阿牛,全栈领域优质创作者。😜📝 个人主页:馆主阿牛🔥🎉 支持我:点赞👍收藏⭐️留言Ὅ…...
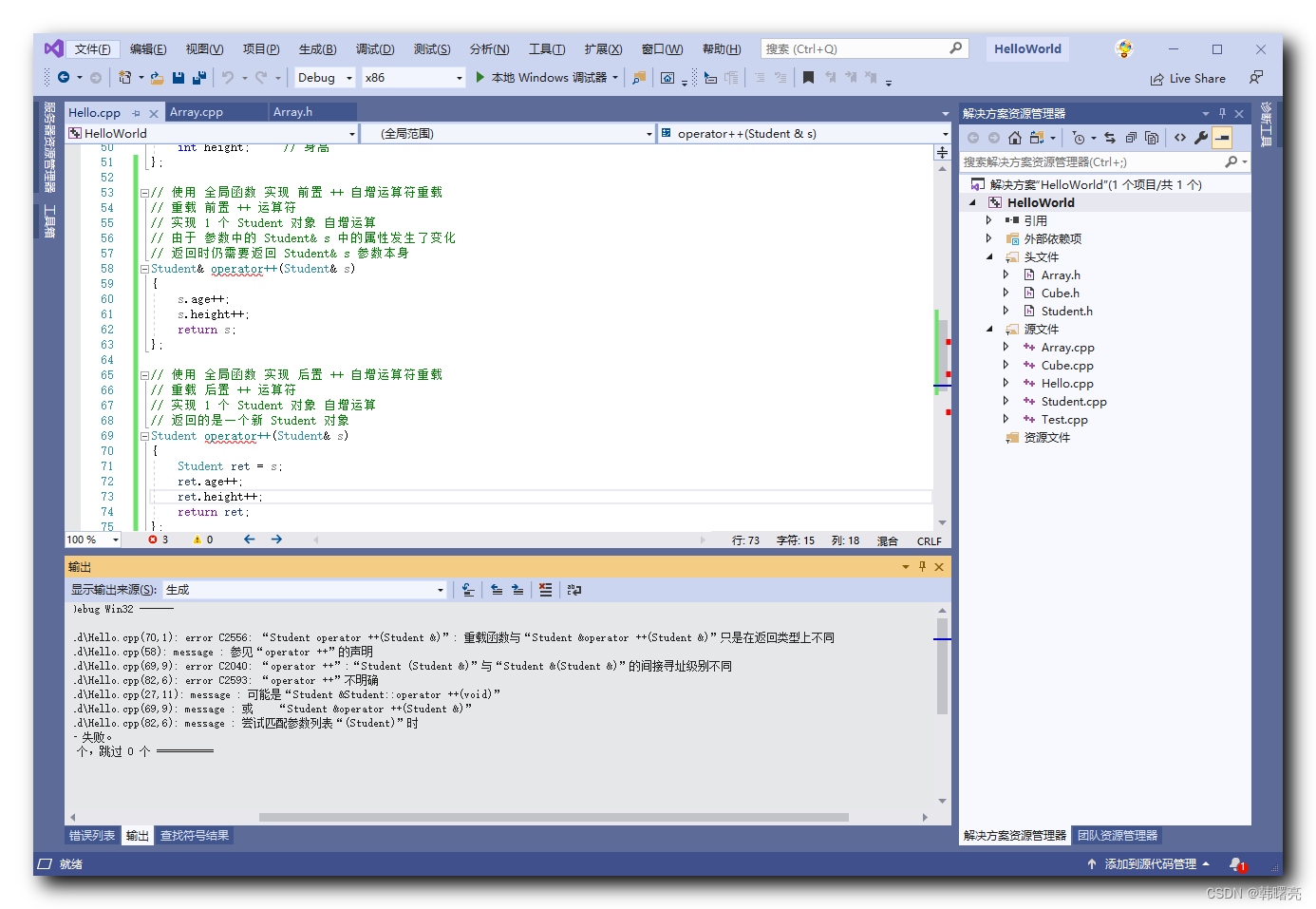
【C++】运算符重载 ⑥ ( 一元运算符重载 | 后置运算符重载 | 前置运算符重载 与 后置运算符重载 的区别 | 后置运算符重载添加 int 占位参数 )
文章目录 一、后置运算符重载1、前置运算符重载 与 后置运算符重载 的区别2、后置运算符重载添加 int 占位参数 上 2 2 2 篇博客 【C】运算符重载 ④ ( 一元运算符重载 | 使用 全局函数 实现 前置 自增运算符重载 | 使用 全局函数 实现 前置 - - 自减运算符重载 )【C】运算符…...

538. 把二叉搜索树转换为累加树
题目描述 给出二叉 搜索 树的根节点,该树的节点值各不相同,请你将其转换为累加树(Greater Sum Tree),使每个节点 node 的新值等于原树中大于或等于 node.val 的值之和。 提醒一下,二叉搜索树满足下列约束…...

java8日期时间工具类
【README】 1)本文总结了java8中日期时间常用工具方法;包括: 日期时间对象格式化为字符串;日期时间字符串解析为日期时间对象;日期时间对象转换; 转换过程中,需要注意的是: Instan…...

算法-动态规划/trie树-单词拆分
算法-动态规划/trie树-单词拆分 1 题目概述 1.1 题目出处 https://leetcode.cn/problems/word-break/description/?envTypestudy-plan-v2&envIdtop-interview-150 1.2 题目描述 2 动态规划 2.1 解题思路 dp[i]表示[0, i)字符串可否构建那么dp[i]可构建的条件是&…...
React框架核心原理
一、整体架构 三大核心库与对应的组件 history -> react-router -> react-router-dom react-router 可视为react-router-dom 的核心,里面封装了<Router>,<Route>,<Switch>等核心组件,实现了从路由的改变到组件的更新…...

python-pytorch 利用pytorch对堆叠自编码器进行训练和验证
利用pytorch对堆叠自编码器进行训练和验证 一、数据生成二、定义自编码器模型三、训练函数四、训练堆叠自编码器五、将已训练的自编码器级联六、微调整个堆叠自编码器 一、数据生成 随机生成一些数据来模拟训练和验证数据集: import torch# 随机生成数据 n_sample…...

制作 3 档可调灯程序编写
PWM 0~255 可以将数据映射到0 75 150 225 尽可能均匀电压间隔...

源码分享-M3U8数据流ts的AES-128解密并合并---GoLang实现
之前使用C语言实现了一次,见M3U8数据流ts的AES-128解密并合并。 学习了Go语言后,又用Go重新实现了一遍。源码如下,无第三方库依赖。 package mainimport ("crypto/aes""crypto/cipher""encoding/binary"&quo…...
)
不用命令行!Win11任务栏图标消失的图形化解决方案(Explorer重启神器推荐)
Win11任务栏图标消失?5种可视化修复方案与深度解析 每次切换虚拟桌面后,Win11任务栏图标集体"失踪"的毛病,堪称微软系统最顽固的"幽灵故障"之一。作为从Windows 95时代就存在的资源管理器痼疾,这个问题在Win1…...

MobaXterm远程连接频繁掉线?3个SSH保活设置让你告别断连烦恼
MobaXterm远程连接频繁掉线?3个SSH保活设置让你告别断连烦恼 当你在深夜调试代码,或是处理关键服务器运维任务时,突然弹出的"Connection closed"提示足以让人抓狂。MobaXterm作为Windows平台最受欢迎的全能终端工具,其免…...

在WSL2 Ubuntu 22.04上搞定RK3568 SDK编译:我遇到的8个坑和填坑方法
在WSL2 Ubuntu 22.04上搞定RK3568 SDK编译:我遇到的8个坑和填坑方法 作为一名长期在Windows环境下工作的嵌入式开发者,第一次尝试在WSL2中编译RK3568 SDK的经历简直像是一场噩梦。从环境配置到最终构建成功,我踩遍了几乎所有可能的坑。这篇文…...

MATPOWER电力系统仿真实践手册:从安装到应用的全面指南
MATPOWER电力系统仿真实践手册:从安装到应用的全面指南 【免费下载链接】matpower MATPOWER – steady state power flow simulation and optimization for MATLAB and Octave 项目地址: https://gitcode.com/gh_mirrors/ma/matpower MATPOWER是一款专为MATL…...

保姆级避坑指南:Ubuntu系统下Hadoop HA集群搭建,我踩过的那些SSH和配置文件的“坑”
Ubuntu下Hadoop HA集群搭建:那些教科书不会告诉你的实战陷阱 第一次在Ubuntu上搭建Hadoop HA集群时,我天真地以为照着官方文档就能顺利跑起来。直到SSH连接莫名其妙失败、JournalNode权限报错刷屏、ZKFC死活不启动时,才明白为什么有人说大数据…...

深度解析 ConcurrentHashMap 1.8:put 与 get 核心流程全解
在 Java 并发编程中,ConcurrentHashMap 是线程安全的高频使用集合,相比线程不安全的 HashMap、效率低下的 HashTable(全锁),JDK 1.8 版本的 ConcurrentHashMap 做了底层结构重构和锁机制优化,成为高并发场景…...
✅)
计算机毕业设计:汽车数据可视化与后台管理平台 Django框架 requests爬虫 可视化 车辆 数据分析 大数据 机器学习(建议收藏)✅
博主介绍:✌全网粉丝10W,前互联网大厂软件研发、集结硕博英豪成立软件开发工作室,专注于计算机相关专业项目实战6年之久,累计开发项目作品上万套。凭借丰富的经验与专业实力,已帮助成千上万的学生顺利毕业,…...

51单片机Proteus仿真实战:从零构建流水灯系统
1. 环境准备:搭建51单片机开发环境 第一次接触51单片机的朋友可能会被各种工具软件搞晕,其实只需要两个核心工具就能完成流水灯仿真:Proteus和Keil。我刚开始学单片机时也踩过不少坑,这里把最稳定的版本和安装要点分享给大家。 Pr…...

VScode 高效开发 Springboot 应用的完整指南
1. 环境准备与项目创建 第一次用VScode开发Springboot项目时,我对着空白编辑器发呆了半小时。后来发现只要装对插件,效率能翻倍。先打开VScode的扩展商店,这三个插件是必装的: Java Extension Pack:包含语言支持、调…...

当多线雷达遇上RTK:一个能跑工业现场的SLAM方案
多传感器融合建图及定位的工程化落地方案,多线雷达rtk;室内室外导航都适用。 包含部署文档和代码注释;包含工程落地角度的优化。 不含运动控制。 室外场景用RTK信号稳如老狗,一进厂房立马抓瞎;多线雷达在室内横扫千军…...