osg实现自定义插件读取自定义格式的模型文件到场景
目录
1. 前言
2. 预备知识
3. 工具、原料
4. 代码实现
1. 前言
osg提供了很多插件来读取模型文件到场景中,这些插件支持大约70种格式类型的文件,但现实中的文件是各式各样,osg不可能囊括所有类型文件,当osg不支持某种类型格式文件时,就需要自己根据文件的格式开发插件来对这些文件定制解析、读取。
本文讲解在osg中,如何实现自定义插件读取自定义格式的模型文件到场景。在读本博文之前,强烈建议先看osgDB::readNodeFile等函数源码剖析博文,该篇博文对osg读取文件的核心函数osgDB::readNodeFile的源码及原理机制进行了深入的剖析,看完并理解后,更加深对本博文的理解。
2. 预备知识
在osgDB::readNodeFile等函数源码剖析 博文提到,如果想要读取一个自定义格式的文件,则:
- 必须开发一个读写器类,该读写器类从ReaderWriter类派生,并重写相应的虚函数。
- 利用REGISTER_OSGPLUGIN宏将自定义读写器注册到系统内部,该宏的第1个参数为该类型文件的扩展名,第2个参数是自定义的读写器类名称。
- 将1、2步用dll来封装实现,dll文件名格式为:osgdb_ext.dll或osgdb_extd.dll,其中ext为文件扩展名,d表示debug版,没d的表示release版,并将生成的dll放到osgPlugins-xx.yy.zz目录,其中xx.yy.zz为osg版本号。
3. 工具、原料
本次用到的开发环境如下:
- osg 3.6.2。
- Visual Studio 2022。
- Windows 11 操作系统。
4. 代码实现
现在假设有一个名称为sphere.csdn 格式的文件,文件内容如下:

图1
这个文件包含创建一个地球所需的数据,其中第1个数值表示球半径;接下来三个数值表示球心位置x、y、z的值,即球位于何处;最后一个表示贴在球上的纹理图片,注意,该纹理图片位于工程的当前目录下。这几个数据之间用空格隔开,空格的个数无所谓。问题的提出:怎么解析这个文件,将其数据在视景器中展现出来?
步骤如下:
- 先用Visual Studio 2022建立一个dll工程,并将该dll编译生成的输出目录设置为:osg插件目录下,如:E:\osg\build_osg3.6.2\bin\osgPlugins-3.6.2,请根据你本机实际更改此目录。
- 将debug版的dll目标文件名称改为osgdb_csdnd,release版为osgdb_csdn,其中csdn为文件扩展名。
- 在Visual Studio 2022中请自行设置该工程的头文件和lib文件,这是osg开发基础,在次不赘述。
- 新建一个readMy3DModel类。
如下为该插件在Visual Studio 2022的设置:

图2
readMy3DModel类的.h文件和cpp文件如下:
.h文件:
#ifndef _READMY3DFMODEL_EXPORT_H
#define _READMY3DFMODEL_EXPORT_H
#include<osgDB/ReaderWriter>
#include<osgDB/Registry>
using namespace osgDB;
class readMy3DModel : public ReaderWriter
{
public:readMy3DModel();~readMy3DModel();
public:// 返回类名virtual const char* className() const override;// 读节点virtual ReaderWriter::ReadResult readNode(const std::string& fileName, const osgDB::ReaderWriter::Options* options) const override;private:osg::Node* makeSphere(const std::string& strFileDirPath, std::ifstream& stream) const;void doTexture(const std::string& strTextureImageFilePath, osg::Geode* pShereGeode) const;
};REGISTER_OSGPLUGIN(csdn, readMy3DModel)#endif .cpp文件:
#include "readMy3DModel.h"
#include<osgDB/FileNameUtils> // 这里有很多文件操作相关的工具类,如:获取文件扩展名、文件目录名等
#include<osgDB/FileUtils> // 这里有很多文件操作相关的工具类,如:文件是否存在,查找文件、文件类型等
#include<osgDB/ReadFile>
#include<osg/ShapeDrawable>
#include<osg/Texture2D>
readMy3DModel::readMy3DModel()
{supportsExtension("csdn", "sphere csdn model");
}readMy3DModel::~readMy3DModel()
{}ReaderWriter::ReadResult readMy3DModel::readNode(const std::string& fileName, const osgDB::ReaderWriter::Options* options) const
{ReaderWriter::ReadResult result;auto strExt = osgDB::getLowerCaseFileExtension(fileName);// 在构造函数里必须先通过supportsExtension函数将文件的扩展名加入,否则这里会返回falseif (!acceptsExtension(strExt)) {OSG_WARN << fileName << "Not Found!";result = ReaderWriter::ReadResult::FILE_NOT_FOUND;return result;}auto strFileFullPath = osgDB::findDataFile(fileName, options); // 获取文件的绝对路径if (!osgDB::fileExists(strFileFullPath)){OSG_WARN << strFileFullPath << "is not exist!";result = ReaderWriter::ReadResult::FILE_NOT_FOUND;return result;}auto strFileDirPath = osgDB::getFilePath(strFileFullPath); // 获取模型文件所在的目录std::ifstream stream(strFileFullPath.c_str(), std::ios::in | std::ios::binary);if (!stream){result = ReaderWriter::ReadResult::ERROR_IN_READING_FILE;return result;}// 构建球体result = makeSphere(strFileDirPath, stream);return result;
}const char* readMy3DModel::className() const
{return "sphere csdn model";
}osg::Node* readMy3DModel::makeSphere(const std::string& strFileDirPath, std::ifstream& stream) const
{osg::Node* pShereNode{nullptr};osgDB::Input fr;fr.attach(&stream);// 以下解析sphere.csdn文件auto radius = 0.0f;auto center = osg::Vec3d(0.0, 0.0, 0.0);auto textureImageFilePath = std::string();/* 读取%f表示读取数值,%s表示读取字符串。注意:%f与%f或%f与%s之间的分隔符即空格个数不需要和sphere.csdn文件完全一致sphere.csdn中要是字符串,必须用英文双引号括起来*/if (!fr.matchSequence("%f %f %f %f %s")){return pShereNode;}fr.readSequence(radius);auto x = 0.0f, y = 0.0f, z = 0.0f;fr.readSequence(x);fr.readSequence(y);fr.readSequence(z);center.set(x, y, z);fr.readSequence(textureImageFilePath);textureImageFilePath = strFileDirPath + R"(\)" + textureImageFilePath;bool bTextureImageFilePathIsExist = osgDB::fileExists(textureImageFilePath);if (!bTextureImageFilePathIsExist){OSG_WARN << textureImageFilePath << "is not exist!";}auto pShereGeode = new osg::Geode();osg::TessellationHints* pHints = new osg::TessellationHints;pHints->setDetailRatio(5.0f); // 球的精细度设置auto pSpere = new osg::ShapeDrawable(new osg::Sphere(center, radius), pHints);pShereGeode->addDrawable(pSpere);pShereNode = pShereGeode;if (bTextureImageFilePathIsExist){doTexture(textureImageFilePath, pShereGeode);}return pShereNode;
}// 为地球贴纹理
void readMy3DModel::doTexture(const std::string& strTextureImageFilePath, osg::Geode* pShereGeode) const
{/*注意:这里需要读取jpg,故请保证jpg插件存在,否则读取jpg会失败。关于怎么编译jpg插件到osg,请参见:https://blog.csdn.net/danshiming/article/details/115412956*/auto pImage = osgDB::readImageFile(strTextureImageFilePath);if (nullptr == pImage){OSG_WARN << "read " << strTextureImageFilePath << "Failed!";return;}// 构造二维纹理对象auto pTexture2D = new osg::Texture2D;pTexture2D->setImage(pImage);// 设置二维纹理过滤器属性pTexture2D->setWrap(osg::Texture::WRAP_S, osg::Texture::CLAMP);pTexture2D->setWrap(osg::Texture::WRAP_T, osg::Texture::CLAMP);pTexture2D->setFilter(osg::Texture::MIN_FILTER, osg::Texture::LINEAR);pTexture2D->setFilter(osg::Texture::MAG_FILTER, osg::Texture::LINEAR);// 将纹理贴到地球上pShereGeode->getOrCreateStateSet()->setTextureAttributeAndModes(0, pTexture2D, osg::StateAttribute::ON);
}说明:
- 在.h文件中需要通过如下宏,将该插件类即该读写器注册到osg内核:
REGISTER_OSGPLUGIN(csdn, readMy3DModel)关于这个宏的作用及参数含义,请参见前提提到的那篇博客。
- 本类重写了父类的className和readNode函数。
- osgDB::Input从osgDB:: FieldReaderIterator类派生而来,是一个字段迭代器,通过该对象可以遍历sphere.csdn中每个字段。当然,你也可以自己实现读取一行然后按空格解析出每个数据。
- 因为贴纹理时,用的是jpg图片,所以本机需要有读取jpg的插件并挂接到osg中,关于怎么编译jpg插件到osg,请参见:osg第三方插件的编译方法(以jpeg插件来讲解)博文。
- 其它的内容,请参见注释。
请确保sphere.csdn和land_shallow_topo_2048.jpg文件在当前工程目录下,编写主程序以便调用该dll,如下:
#include<osgViewer/Viewer>
#include<osgDB/readFile>
#include<osgDB/FileUtils>int main(int argc, char *argv[])
{osgViewer::Viewer viewer;osg::ref_ptr<osgDB::Options>spOptions = new osgDB::Options();spOptions->setDatabasePath("."); // 设置文件搜索目录,即在当前目录下看是否存在sphere.csdn文件auto pSphereNode = osgDB::readNodeFile("sphere.csdn", spOptions);auto pRoot = new osg::Group;pRoot->addChild(pSphereNode);viewer.setSceneData(pRoot);return viewer.run();
}
运行结果如下:

图3
也可以在命令行中输入如下命令验证是否加载成功:
osgViewerd sphere.csdn至此,一个自定义的读写插件开发完成。
相关文章:
osg实现自定义插件读取自定义格式的模型文件到场景
目录 1. 前言 2. 预备知识 3. 工具、原料 4. 代码实现 1. 前言 osg提供了很多插件来读取模型文件到场景中,这些插件支持大约70种格式类型的文件,但现实中的文件是各式各样,osg不可能囊括所有类型文件,当osg不支持某种类型格式…...

redis进阶
redis.conf 启动的时候就通过配置文件来启动的! # 这个不是配置的,就是在这儿说明一下 # 当配置中需要配置内存大小时,可以使用 1k, 5GB, 4M 等类似的格式,其转换方式如下(不区分大小写) # # 1k > 1000 bytes # 1kb > 102…...
(一)正点原子STM32MP135移植——准备
一、简述 使用板卡:正点原子的ATK-DLMP135 V1.2 从i.mx6ull学习完过来,想继续学习一下移植uboot和内核的,但是原子官方没有MP135的移植教程,STM32MP157的移植教程用的又是老版本的代码,ST官方更新后的代码不兼容老版本…...

Kotlin的关键字 lateinit 和 lazy
序、完善一下曾经的草稿。 Kotlin通常要求我们在定义属性后立即对起进行初始化,当我们不知道理想的初始值时,这样做似乎很奇怪,尤其是在生命周期驱动android属性的情况下。 lateinit 简介 lateinit,Kotlin提供的一个可以延迟初…...

阿里云服务器ECS详细介绍_云主机_服务器托管_弹性计算
阿里云服务器ECS英文全程Elastic Compute Service,云服务器ECS是一种安全可靠、弹性可伸缩的云计算服务,阿里云提供多种云服务器ECS实例规格,如经济型e实例、通用算力型u1、ECS计算型c7、通用型g7、GPU实例等,阿里云服务器网分享阿…...

12、建立健全人员培训体系
9、大小屏分离与精细化审核 10、质量审核的设立与合并 11、视频分类建议 内容仓为公司其他部门输送了许多人才,既包括有潜力的主管,也有表现突出或者具备某些特殊能力的员工,从内容仓走出的同事,有些已经成为公司重要业务某个方…...
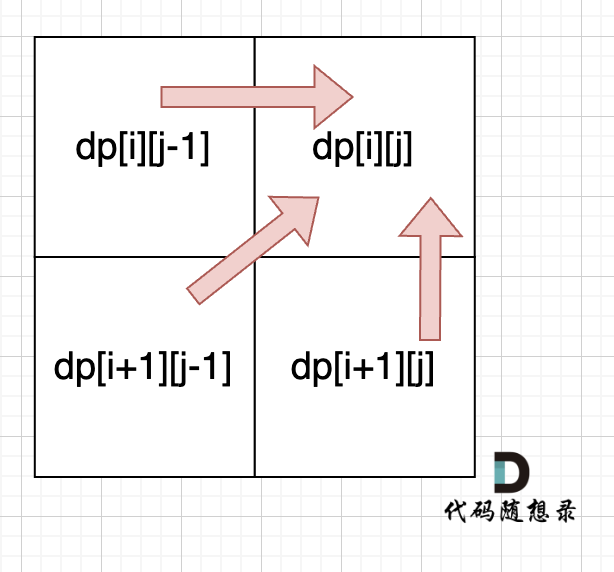
代码随想录算法训练营第五十九天 | 647. 回文子串 516.最长回文子序列
1. 回文子串 647. 回文子串 - 力扣(LeetCode) 一个子串左右两个元素相等,并且中间对称,才是回文子串 即 ij 时,[i1: j-1]对称 dp[i][j]: [i:j] 是否是回文字串 当 子串长度大于2 由 dp[i1][j-1] 推出…...

React Redux
redux是什么 Redux是一个模式和库,用于管理和更新应用程序状态,使用称为“action”的事件。它是需要在整个应用程序中使用的状态的集中存储,规则确保状态只能以可预测的方式更新。 Redux主要有三个功能: 获取当前状态更新状态监…...

StreamingLLM - 处理无限长度的输入
文章目录 关于 StreamingLLM使用关于 StreamingLLM Efficient Streaming Language Models with Attention Sinks GitHub : https://github.com/mit-han-lab/streaming-llm论文:https://arxiv.org/abs/2309.17453在流媒体应用程序(如多轮对话)中 部署大型语言模型(LLM)是迫…...

[Linux 命令] nm 详解
1. nm 命令: 显示关于指定 File 中符号的信息,文件可以是对象文件、可执行文件或对象文件库。如果文件没有包含符号信息,nm 命令报告该情况,但不把它解释为出错条件。 nm 命令缺省情况下报告十进制符号表示法下的数字值。 2. 命…...
好文学作品的鉴赏标准
好文学作品的鉴赏标准 2023年诺贝尔文学奖颁给了挪威剧作家约恩福瑟。由于之前的博彩公司给中国作家残雪开出了最高的赔率,以及诺贝尔官方推特在揭晓奖项前发布了一张泰戈尔99年前访华的老照片,残雪的获奖氛围在国内各类媒体的渲染下被拉至极高。当奖项…...

智慧公厕:将科技融入日常生活的创新之举
智慧公厕是当今社会中一项备受关注的创新项目。通过将科技融入公厕设计和管理中,这些公厕不仅能够提供更便利、更卫生的使用体验,还能够极大地提升城市形象和居民生活质量。本文将以智慧公厕领先厂家广州中期科技有限公司,大量的精品案例项目…...
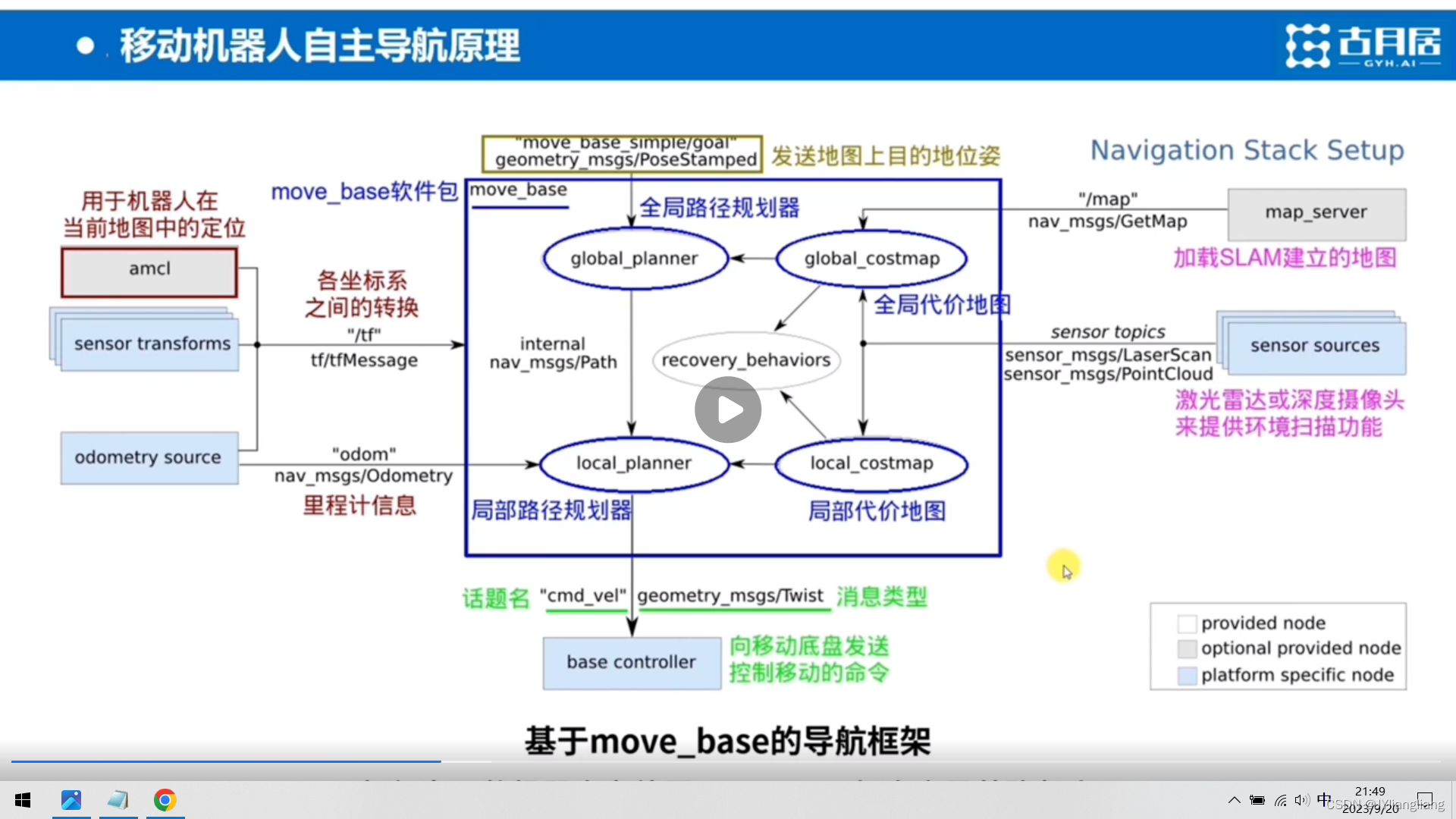
ROS(0)命令及学习资源汇总
ROS安装命令 参考:Ubuntu20.04.4安装ROS Noetic详细教程 - 知乎 安装C和Python3 sudo apt-get install g sudo apt-get install python3 ROS运行小海龟仿真器 roscore确定ROS是否运行成功rosrun turtlesim turtlesim_node运行小海龟仿真器rosrun turtlesim turtle_…...

NodeMCU ESP8266开发流程详解(图文并茂)
文章目录 整体架构打开软件setuploop 连接开发板CP2102版本CH340版本 下载结论 整体架构 NodeMCU ESP8266基于Arduino IDE的开发相对来说还是比较容易上手的,我们基本需要以下几个东西; 一台安装好Arduino IDE的PC,并且已经部署环境&#x…...

【最终版】tkinter+matplotlib实现一个强大的绘图系统
文章目录 辅助坐标轴功能实现代码优化源代码 Python绘图系统: 前置源码: Python打造动态绘图系统📈一 三维绘图系统 📈二 多图绘制系统📈三 坐 标 轴 定 制📈四 定制绘图风格 📈五 数据生成导入…...
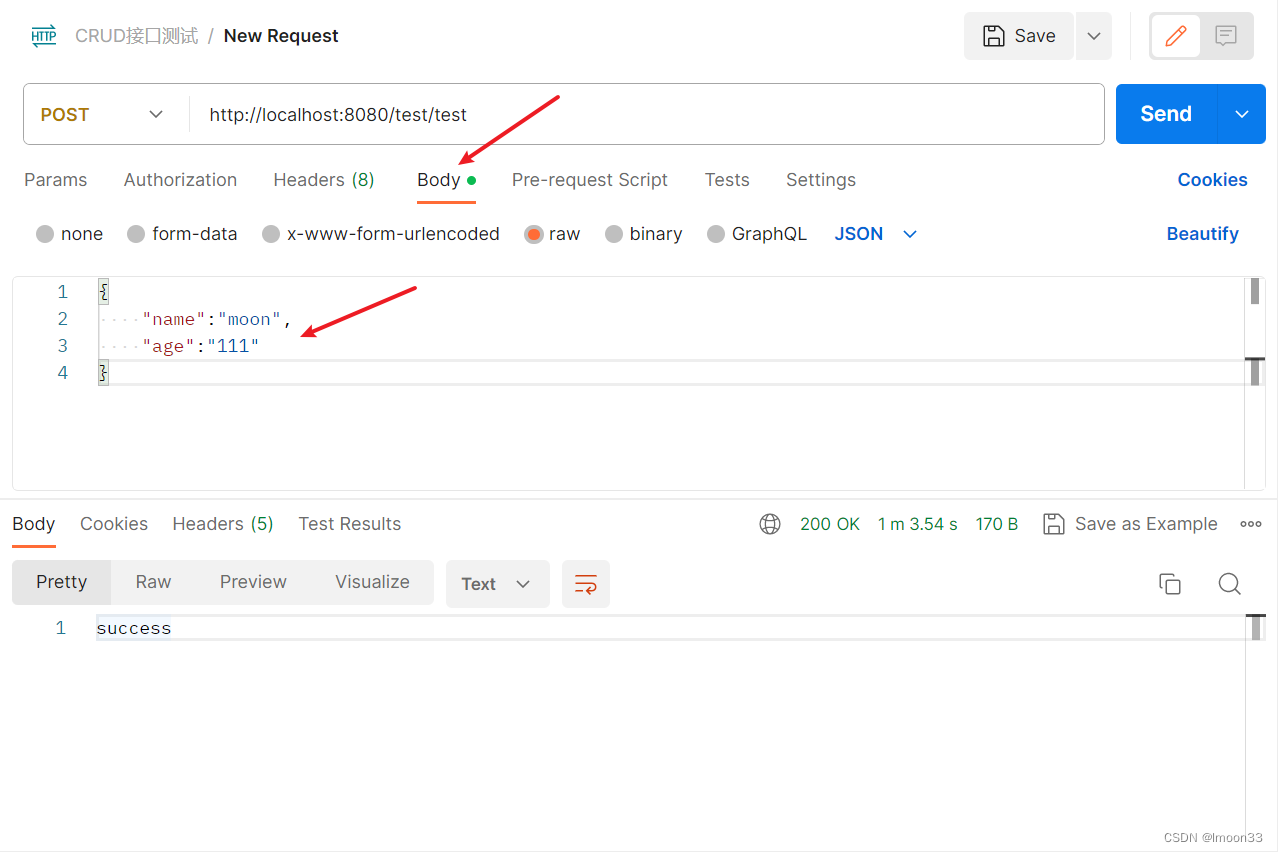
Postman使用实例
Postman使用实例 实体类Emp package com.example.springboot_postman.pojo;import com.fasterxml.jackson.annotation.JsonIgnoreProperties; import lombok.AllArgsConstructor; import lombok.Data; import lombok.NoArgsConstructor;import javax.persistence.*; import j…...

【ES的优势和原理及分布式开发的好处与坏处】
文章目录 ES的优势及分布式开发的好处1.ES的优势1.1 优势概述1.2 相关问题1)为什么需要 Elasticsearch?MySQL 不行吗?2)SQL检索的问题:3)ES检索快的原理 2.分布式开发的好处与坏处 ES的优势及分布式开发的好…...

Autosar诊断实战系列23-CanTp半/全双工及相关工程问题思考
本文框架 前言1. CanTp半/全双工基本介绍1.1 差异比较1.2 不同模式下可能发生场景分析1.2.1 当CanTp正在发送1.2.2 当CanTp正在接收2. 相关工程问题思考前言 在本系列笔者将结合工作中对诊断实战部分的应用经验进一步介绍常用UDS服务的进一步探讨及开发中注意事项, Dem/Dcm/C…...
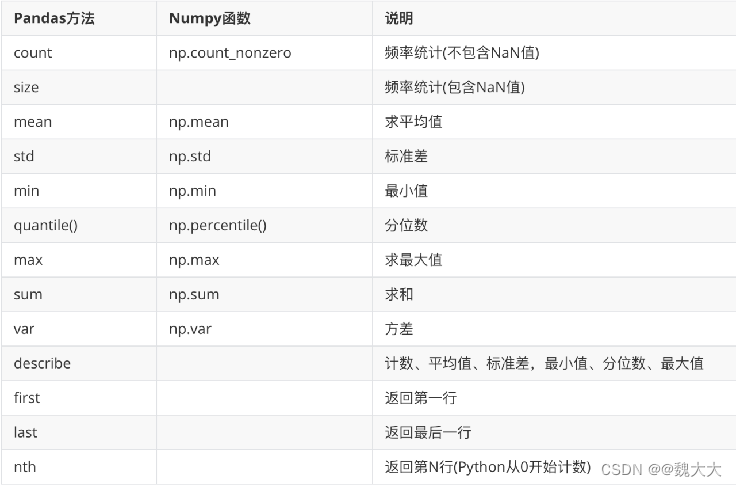
【Pandas】数据分组groupby
本文目标: 应用groupby 进行分组对分组数据进行聚合,转换和过滤应用自定义函数处理分组之后的数据 文章目录 1. 数据聚合1.1 单变量分组聚合1.2 Pandas内置聚合方法1.3 聚合方法使用Numpy的聚合方法自定义方法同时计算多种特征向agg/aggregate传入字典 2. 数据转换…...
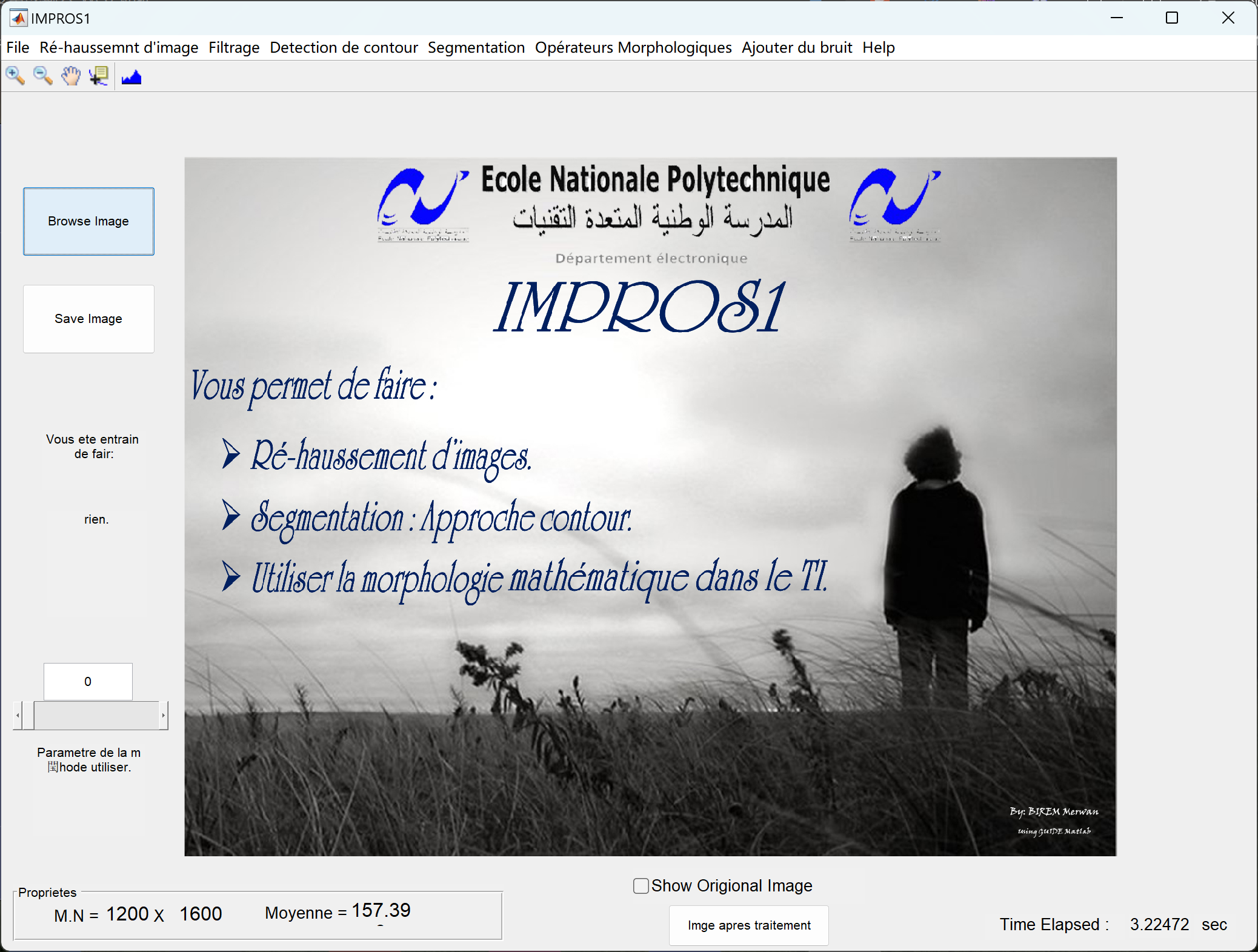
【图像处理GIU】图像分割(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...
)
从安装到实战:用Python+Neo4j Driver构建你的第一个社交网络图谱(含完整代码)
从零构建社交网络图谱:Python与Neo4j全流程实战指南 社交网络分析正在重塑我们对复杂关系的理解。想象一下,当我们需要分析Twitter上的信息传播路径、LinkedIn的职业关系网或是电商平台的用户推荐系统时,传统的关系型数据库往往显得力不从心。…...
)
AI大会停车难?2026官方未公开的预约分流机制(附内测版停车码申领通道)
更多请点击: https://intelliparadigm.com 第一章:2026年AI技术大会停车指引 为保障2026年AI技术大会(Shanghai AI Summit 2026)参会者高效、安全抵达主会场,主办方联合浦东智能交通调度中心部署了新一代AI泊车引导系…...

LRCGET:基于Tauri的离线音乐库批量歌词自动化管理方案
LRCGET:基于Tauri的离线音乐库批量歌词自动化管理方案 【免费下载链接】lrcget Utility for mass-downloading LRC synced lyrics for your offline music library. 项目地址: https://gitcode.com/gh_mirrors/lr/lrcget 在数字音乐收藏日益丰富的今天&#…...

SingleFile终极指南:如何一键保存完整网页到单个HTML文件
SingleFile终极指南:如何一键保存完整网页到单个HTML文件 【免费下载链接】SingleFile Web Extension for saving a faithful copy of a complete web page in a single HTML file 项目地址: https://gitcode.com/gh_mirrors/si/SingleFile SingleFile是一款…...

深入Linux内核:SysRq‘魔法键’的驱动实现与串口触发机制剖析
Linux内核魔法键:SysRq机制的深度实现与串口调试实战 在嵌入式Linux开发中,当系统出现严重故障甚至完全冻结时,传统调试手段往往束手无策。此时,SysRq(System Request)功能就像一把瑞士军刀,为…...

STM32F103的Flash读写,你踩过这几个坑吗?从解锁失败到数据错乱的避坑实录
STM32F103的Flash读写,你踩过这几个坑吗?从解锁失败到数据错乱的避坑实录 第一次在STM32F103上操作Flash时,我天真地以为这不过是几个寄存器配置和地址访问的问题。直到深夜调试时遇到第一个HardFault,我才意识到自己掉进了开发者…...

基于AI智能体的Telegram到Obsidian自动化知识管理方案
1. 项目概述:用AI构建你的第二大脑,从手机到知识库的无缝流转 你有没有过这样的时刻?在手机上刷到一篇深度好文,或者看到一个精彩的YouTube视频,脑子里闪过一个绝妙的点子,你对自己说:“这个得…...

3分钟解锁网易云音乐灰色歌曲:UnblockNeteaseMusic实战指南
3分钟解锁网易云音乐灰色歌曲:UnblockNeteaseMusic实战指南 【免费下载链接】UnblockNeteaseMusic Revive unavailable songs for Netease Cloud Music 项目地址: https://gitcode.com/gh_mirrors/un/UnblockNeteaseMusic 还在为网易云音乐里那些灰色的、无法…...

Adobe-GenP终极指南:如何免费激活Adobe全家桶的完整教程
Adobe-GenP终极指南:如何免费激活Adobe全家桶的完整教程 【免费下载链接】Adobe-GenP Adobe CC 2019/2020/2021/2022/2023 GenP Universal Patch 3.0 项目地址: https://gitcode.com/gh_mirrors/ad/Adobe-GenP Adobe-GenP是一款专门针对Adobe Creative Cloud…...

Zotero AI插件PapersGPT:双引擎驱动,实现文献智能管理与自动化分析
1. 项目概述:当Zotero遇上AI,文献管理进入“自动驾驶”时代 作为一名在学术圈和工业界都摸爬滚打多年的研究者,我深知文献阅读的痛。面对Zotero里堆积如山的PDF,从“标记为待读”到真正“读完并消化”,中间仿佛隔着一道…...