U-boot下netconsole实现
U-boot下netconsole实现
参考1.函数main_loop和u-boot命令执行
上面的do-while会循环命令解析器的"命令输入解析–执行"运行模式。
其中的函数run_list执行如下的函数调用流程:run_list–>run_list_real–>run_pipe_real->cmd_process
源码跟读
# u-boot/common/main.cvoid main_loop(void)cli_init();...s = bootdelay_process(); ...autoboot_command(s);cli_loop(); # u-boot/common/board_r.c
;...
static init_fnc_t init_sequence_r[] = {...stdio_init_tables,INIT_LIST_HEAD(&(devs.list));initr_serial,serial_initialize(); serial_init(); ...stdio_add_devices,drv_system_init ();...strcpy (dev.name, "serial");dev.flags = DEV_FLAGS_OUTPUT | DEV_FLAGS_INPUT;dev.putc = stdio_serial_putc; #ifdef CONFIG_NETCONSOLEdrv_nc_init ();...strcpy(dev.name, "nc");dev.flags = DEV_FLAGS_OUTPUT | DEV_FLAGS_INPUT;dev.start = nc_stdio_start;dev.putc = nc_stdio_putc;...run_main_loop,for (;;)main_loop(); // 进入交互终端void main_loop(void) cli_init(); #ifdef CONFIG_HUSH_PARSER // 使用HUSH解释器u_boot_hush_start();if (top_vars == NULL) {top_vars = malloc(sizeof(struct variables));top_vars->name = "HUSH_VERSION"; // 使用命令showvar可查看 top_vars->value = "0.01"; ...s = bootdelay_process();s = env_get("bootdelay"); // 获取bootdelay信息bootdelay = s ? (int)simple_strtol(s, NULL, 10) : CONFIG_BOOTDELAY;#ifdef CONFIG_OF_CONTROLbootdelay = fdtdec_get_config_int(gd->fdt_blob, "bootdelay", bootdelay); // 支持fdt中修改的bootdelay;...s = env_get("bootcmd"); // 获取默认引导命令;process_fdt_options(gd->fdt_blob); // 获取:kernel-offset、rootdisk-offset信息;stored_bootdelay = bootdelay; // 记录引导倒计时:bootdelayreturn s; // 返回引导命令:bootcmd...autoboot_command(s); // 执行引导命令:bootcmdif (stored_bootdelay != -1 && s && !abortboot(stored_bootdelay)) { // 有设置bootdelay,引导命令非空,无人为打断run_command_list(s, -1, 0); // 执行autoboot_command_fail_handle();cli_loop(); // 自动引导未正常进行后,进入命令行交互#ifndef CONFIG_CONSOLE_DISABLE_CLI
void cli_loop(void)#ifdef CONFIG_HUSH_PARSER // rk3568_defconfig, 开启parse_file_outer();struct in_str input;setup_file_in_str(&input);i->peek = file_peek;i->get = file_get; // 与b_getch 关联:#define b_getch(input) ((input)->get(input))...rcode = parse_stream_outer(&input, FLAG_PARSE_SEMICOLON); // flags标记:分号...do {...rcode = parse_stream(&temp, &ctx, inp, flag & FLAG_CONT_ON_NEWLINE ? -1 : '\n');/* This point is never reached */ // 不应运行到此for (;;);
相关文章:

U-boot下netconsole实现
U-boot下netconsole实现 参考1.函数main_loop和u-boot命令执行 上面的do-while会循环命令解析器的"命令输入解析–执行"运行模式。 其中的函数run_list执行如下的函数调用流程:run_list–>run_list_real–>run_pipe_real->cmd_process 源码跟读…...
Unity设计模式——原型模式
原型模式(Prototype)用原型实例指定创建对象的种类,并且通过拷贝这些原型创建新的对象。原型模式其实就是从一个对象再创建另外一个可定制的对象,而且不需知道任何创建的细节 。 原型类 Prototype: abstract class P…...

leetcode 96 不同的二叉搜索树
给你一个整数 n ,求恰由 n 个节点组成且节点值从 1 到 n 互不相同的 二叉搜索树 有多少种?返回满足题意的二叉搜索树的种数。 示例 1: 输入:n 3 输出:5 示例 2: 输入:n 1 输出:1…...

http发送和接收图片json文件
一、http数据发送 1、先将图片转换为base64格式 std::string detectNet::Mat2Base64(const cv::Mat &image, std::string imgType){std::vector<uchar> buf;cv::imencode(imgType, image, buf);//uchar *enc_msg reinterpret_cast<unsigned char*>(buf.data…...
MM-Camera架构-ProcessCaptureRequest 流程分析
文章目录 processCaptureRequest\_3\_41.1 mDevice1.2 mDevice->ops->process\_capture\_request1.3 hardware to vendor mct\_shimlayer\_process\_event2.1 mct\_shimlayer\_handle\_parm2.2 mct\_shimlayer\_reg\_buffer processCaptureRequest_3_4 sdm660的摄像头走…...
196、管理 RabbitMQ 的用户
开启Rabbitmq的一些命令: 小黑窗输入: rabbitmq-plugins enable rabbitmq_management 启动控制台插件, 就是启动登录rabbitmq控制台的页面,rabbitmq_management 代表了RabbitMQ的管理界面。 rabbitmq-server 启动rabbitMQ服务器…...

【已解决】Python读取sql数据,报错:Not an executable object,解决方案
【已解决】Python读取sql数据,报错:Not an executable object,解决方案 1.报错内容: 通过Python连接sql,读取sql中数据,报错:Not an executable object。具体代码及报错内容见下: …...
STM32 CubeMX ADC采集(HAL库)
STM32 CubeMX ADC采集(HAL库) STM32 CubeMX STM32 CubeMX ADC采集(HAL库)ADC介绍ADC主要特征最小识别电压值:2.4/4096≈0.6mv(不考虑误差)一、STM32 CubeMX设置二、代码部分三,单通道…...

[UUCTF 2022 新生赛]ezpop - 反序列化+字符串逃逸【***】
[UUCTF 2022 新生赛]ezpop 一、解题过程二、其他WP三、总结反思 一、解题过程 题目代码: <?php //flag in flag.php error_reporting(0); class UUCTF{public $name,$key,$basedata,$ob;function __construct($str){$this->name$str;}function __wakeup(){i…...
Selenium进行无界面爬虫开发
在网络爬虫开发中,利用Selenium进行无界面浏览器自动化是一种常见且强大的技术。无界面浏览器可以模拟真实用户的行为,解决动态加载页面和JavaScript渲染的问题,给爬虫带来了更大的便利。本文将为您介绍如何利用Selenium进行无界面浏览器自动…...

万宾荣获深圳应博会“全球应急产业先锋奖”创始人发表峰会演讲
今年5月,住房和城乡建设部表示将全面启动的城市基础设施生命线安全工程工作,通过各类智能感知设备等数字化手段,及早发现和管控城市燃气、桥梁、供水、排水防涝等领域的风险隐患,切实提高城市安全保障能力、维护人民生命财产安全&…...
某果的一个小参数分析
分析链接:aHR0cHM6Ly9hcHBsZWlkLmFwcGxlLmNvbS9hY2NvdW50 分析目标:X-Apple-I-Fd-Client-Info 1.在浏览器搜索关键词,打下断点 我们再里面进行搜索,定位到这个位置,可以看到X-Apple-I-FD-Client-Info这个参数等于e,…...
)
java学习--day22(进程线程)
文章目录 1.什么是进程2.什么是线程3.线程和进程的区别【面试题】4.并发和并行5.创建线程的两种方式【重点】1.继承Thread2.实现Runnable接口 6.线程下面的几个方法7.线程的同步和锁【重要】 1.什么是进程 是独立的运行程序 比如咱们电脑软件,你启动起来以后&…...
对音频切分成小音频(机器学习用)
我是把so-vits中小工具,分析源码然后提取出来了。以后可以写在自己的程序里。 -------流程(这是我做的流程,你可以不用看) 从开源代码中快速获取自己需要的东西 如果有界面f12看他里面的接口,然后在源码中全局搜索&…...
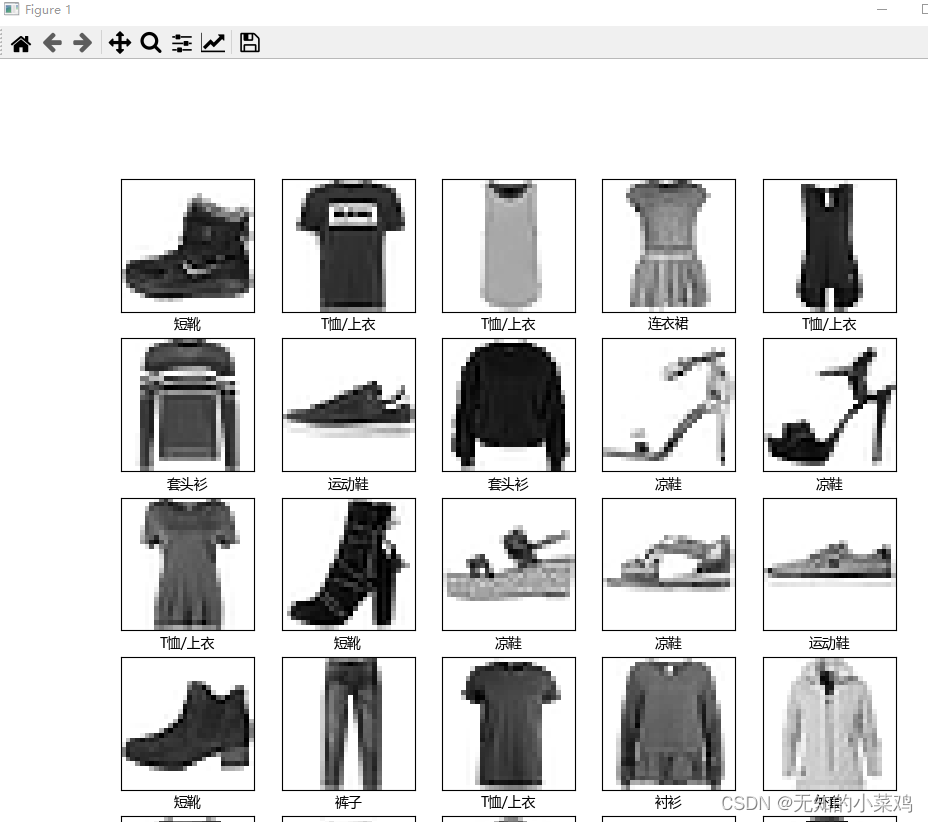
TensorFlow案例学习:对服装图像进行分类
前言 官方为我们提供了一个 对服装图像进行分类 的案例,方便我们快速学习 学习 预处理数据 案例中有下面这段代码 # 预处理数据,检查训练集中的第一个图像可以看到像素值处于0~255之间 plt.figure() # 创建图像窗口 plt.imshow(train_images[0]) # …...

单目3D目标检测——SMOKE 模型推理 | 可视化结果
本文分享SMOKE的模型推理,和可视化结果。以kitti数据集为例子,对训练完的模型进行推理,并可视化3D框的结果,画到图像中。 关于模型原理、搭建开发环境、模型训练,可以参考之前的博客: 【论文解读】SMOKE …...

C++智能指针shared_ptr使用详解
shared_ptr 是一个共享所有权的智能指针,允许多个指针指向同一个对象。 shared_ptr使用引用计数,每一个shared_ptr的拷贝都指向相同的内存。每使用它一次,内部的引用计数加1,每析构一次,内部的引用计数减1,减为0时,释放所指向的堆内存。shared_ptr内部的引用计数是…...
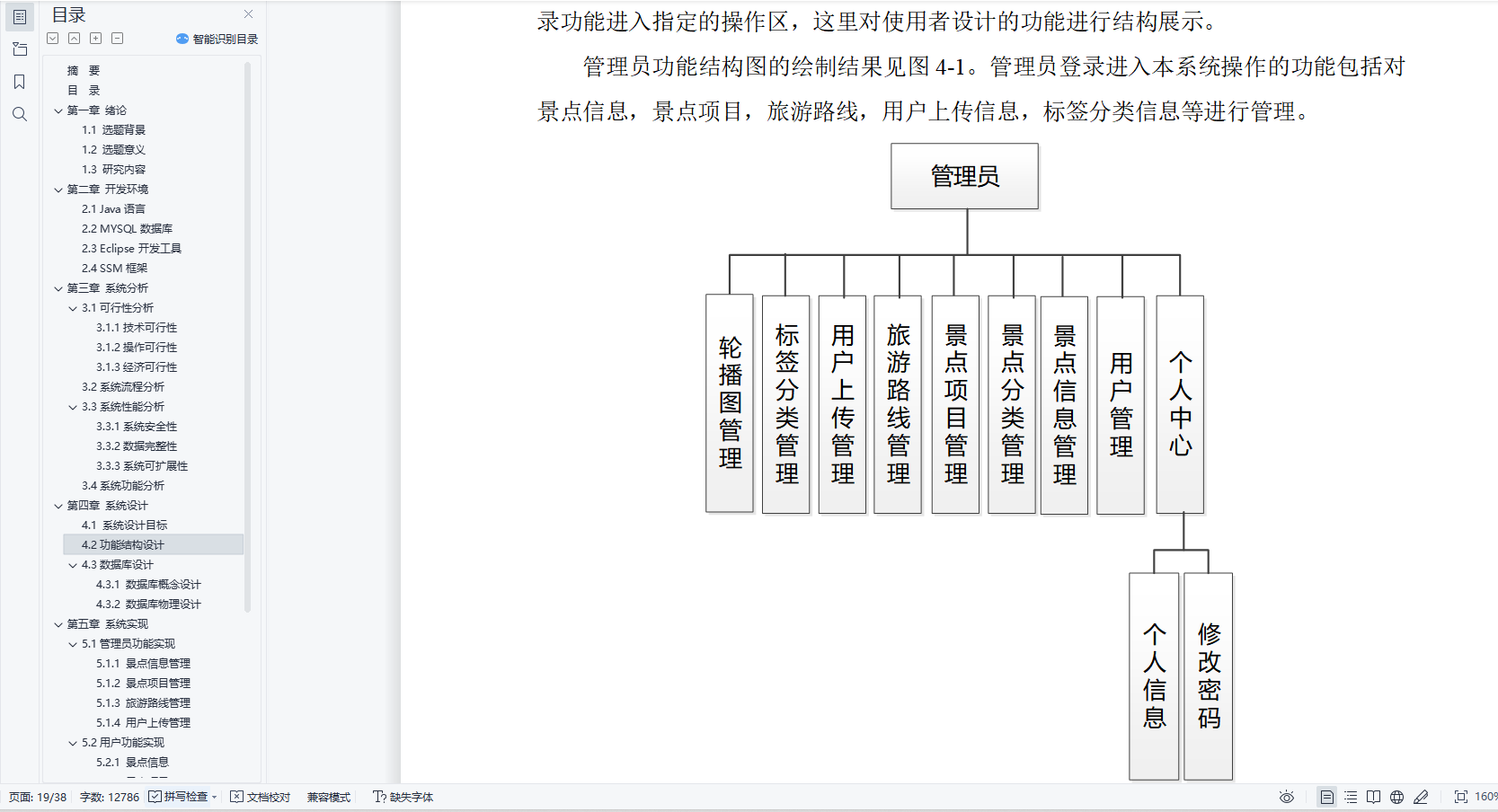
基于Java的个性化旅游攻略系统设计与实现(源码+lw+ppt+部署文档+视频讲解等)
文章目录 前言具体实现截图论文参考详细视频演示代码参考源码获取 前言 💗博主介绍:✌全网粉丝10W,CSDN特邀作者、博客专家、CSDN新星计划导师、全栈领域优质创作者,博客之星、掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java、小程序技…...
中国替代方案探索:替代谷歌企业邮箱的选择
“谷歌企业邮箱在中国有哪些替代方案?在中国市场上表现出色的企业邮箱有腾讯企业邮箱、网易企业邮箱、阿里企业邮箱以及适合外贸的Zoho Mail企业邮箱。” 在中国由于各种原因,包括网络安全、数据隐私保护以及与GFW(防火长城)等,谷歌企业邮箱并…...
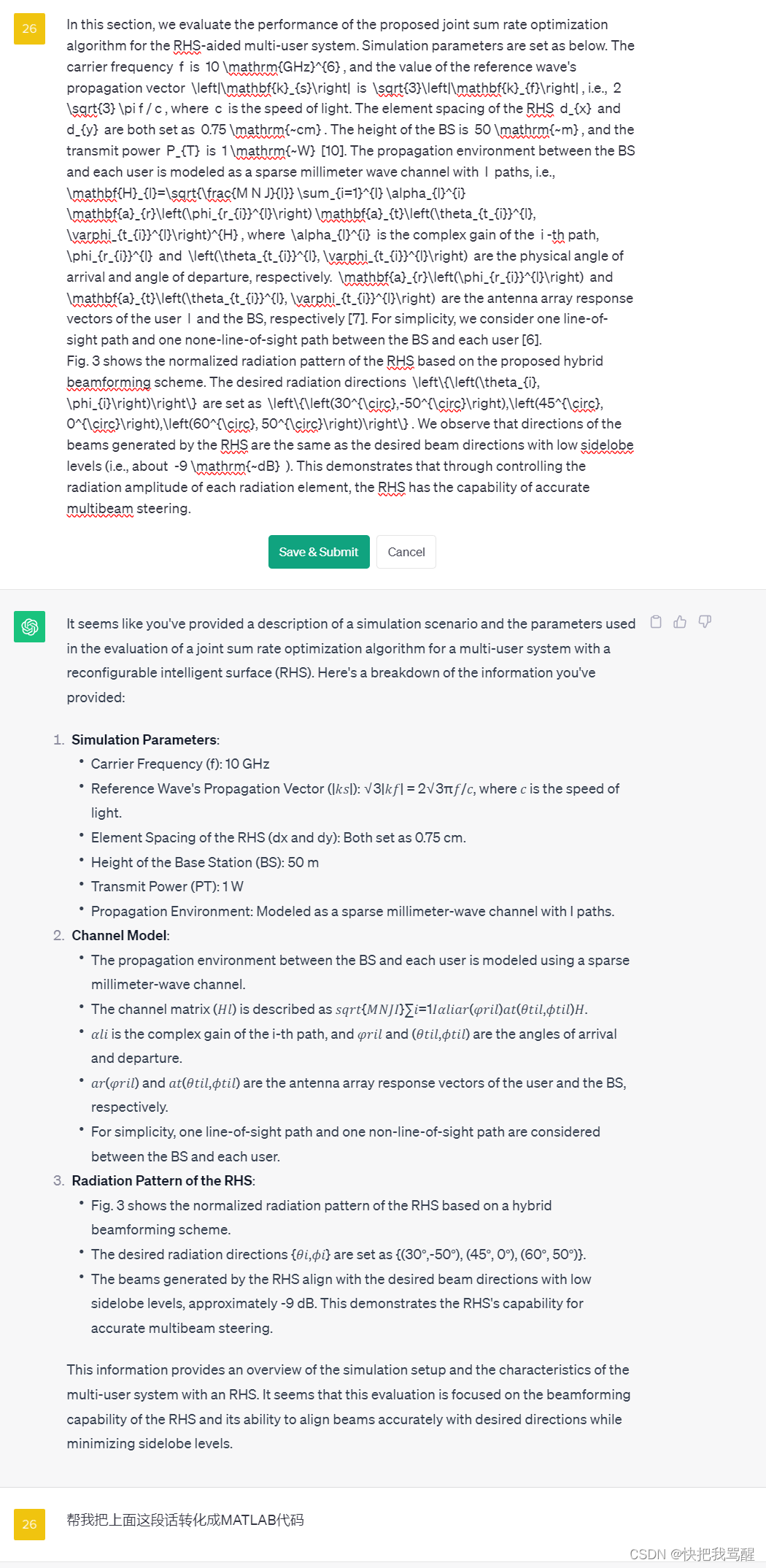
Holographic MIMO Surfaces (HMIMOS)以及Reconfigurable Holographic Surface(RHS)仿真
这里写目录标题 Simulation setupchatgpt帮我总结代码总结:chatgpt生成的代码还是不靠谱:考虑把之前看的RHS中对于多用户的改成单用户全系MIMO与普通MIMO或者说RIS的区别到底是啥? Holographic MIMO Surfaces (HMIMOS)…...

Rviz Publish Point进阶玩法:打造你的交互式机器人任务编辑器
Rviz Publish Point进阶玩法:打造你的交互式机器人任务编辑器 在仓储巡检、展厅导览等场景中,机器人需要频繁执行多目标点任务序列。传统编程方式每次修改路径都需要重新编译代码,而Rviz的Publish Point功能配合定制化开发,可以将…...

基于MCP协议构建AI工具服务器:连接Web与AI的标准化适配器
1. 项目概述:一个连接Web与AI的“万能适配器”如果你正在尝试让AI助手(比如ChatGPT、Claude)去访问一个网站、查询实时天气、或者控制你的智能家居,你可能会发现一个核心难题:这些大模型本身是“离线”的,它…...

Visual Studio Code搭建c语言编译环境下载c/c++ Runner插件编译报错问题
安装版本默认是最新插件。下载如果无法编译就换版本。最后换到1.5.5版本就编译成功了。耗时2小时解决无法编译报错。process_begin: CreateProcess(NULL, ./build\Debug/outDebug "", ...) failed. make (e2): 系统找不到指定的文件。...

【ZYNQ】AXI4总线协议实战:从握手时序到PS-PL高效通信
1. AXI4总线协议基础:从握手信号到通道架构 第一次接触ZYNQ的PS-PL通信时,我被AXI4协议里那些VALID/READY信号搞得头晕眼花。直到在示波器上抓到真实的握手波形,才突然理解这个看似复杂的协议其实像极了我们日常的对话机制——只有当说话方准…...

LearningX:构建结构化开发者知识体系,从基础到架构的实践指南
1. 项目概述:一个面向开发者的系统性学习仓库最近在GitHub上看到一个挺有意思的项目,叫“LearningX”。光看名字,你可能会觉得这又是一个普通的“Awesome-XXX”列表,或者是一堆学习资料的简单堆砌。但当我点进去,花了一…...

用PyTorch和ECANet18搞定RAF-DB表情分类:从数据集下载到模型部署的保姆级教程
基于ECANet18的RAF-DB表情识别实战:从零构建高精度分类模型 人脸表情识别(FER)作为计算机视觉领域的重要分支,在情感计算、智能交互等领域展现出巨大潜力。本文将带您完整实现一个基于PyTorch和ECANet18的端到端表情识别系统&…...

3步实现专业级AI换脸:roop-unleashed创新方案指南
3步实现专业级AI换脸:roop-unleashed创新方案指南 【免费下载链接】roop-unleashed Evolved Fork of roop with Web Server and lots of additions 项目地址: https://gitcode.com/gh_mirrors/ro/roop-unleashed 在数字创意飞速发展的今天,AI换脸…...

Wand-Enhancer:免费解锁WeMod专业版功能的终极本地增强工具
Wand-Enhancer:免费解锁WeMod专业版功能的终极本地增强工具 【免费下载链接】Wand-Enhancer Advanced UX and interoperability extension for Wand (WeMod) app 项目地址: https://gitcode.com/gh_mirrors/we/Wand-Enhancer 还在为WeMod专业版的高昂订阅费用…...

Docker容器化Emacs:构建可移植、一致的开发环境解决方案
1. 项目概述:为什么要在Docker里运行Emacs?如果你是一个Emacs的重度用户,或者是一个开发者,你很可能遇到过这样的困境:你精心配置的Emacs环境,在换了一台新电脑、升级了操作系统,或者需要在多台…...

Python自动化Excel数据抓取:OpenClaw技能实战指南
1. 项目概述:从Excel表格到智能数据抓取如果你每天的工作都离不开Excel,并且经常需要从各种网页、文档甚至PDF里手动复制粘贴数据,然后费劲地整理到表格里,那你一定对“Excel大师”这个称号既向往又头疼。我们总希望Excel能更“聪…...