基于指数趋近律的机器人滑模轨迹跟踪控制算法及MATLAB仿真
机械手是工业制造领域中应用最广泛的自动化机械设备,广泛应用于工业制造、医疗、军工、半导体制造、太空探索等领域。它们虽然形式不同,但都有一个共同的特点,即能够接受指令,并能准确定位到三维(或二维)空间的某一点进行工作。由于其在3D打印、喷漆机器人、汽车制造等领域的广泛应用,机器人的控制显得尤为重要。而滑模变结构控制SMC由于其快速的瞬态响应和对不确定性和扰动的鲁棒性,在机器人控制领域受到了广泛的关注。
问题描述
机器人轨迹跟踪控制问题可以描述为: 给定一个参考轨迹,找到一个容许控制u,使得实际的关节角度与参考的关节角度误差最小,从而使得机械臂末端轨迹跟踪上参考轨迹。
理论分析
1滑模控制基础概念
1.1滑模控制定义
滑模控制(SMC)也称为可变结构控制,本质上是一种特殊的非线性控制,其非线性性能是控制的不连续性。该控制策略与其他控制的区别在于“结构”系统的状态不是固定的,但是在动态过程中,它可以根据系统的当前状态(例如偏差和其导数)有意地进行更改,从而迫使系统以预定的“滑动模式”状态轨迹运动。滑模的设计可以不受对象参数和干扰的影响,滑模控制具有响应速度快,对参数变化和干扰不敏感,无需在线系统识别,物理实现简单等优点。通过不连续控制有意改变系统结构将相位轨迹驱动到稳定的超平面或流形的系统。不受干扰和参数变化
1.2滑模趋近律
滑模控制下的系统一般分为两个阶段:
(1)从系统初始状态到滑模面;
(2)在滑模面上滑模到达系统平衡点;
2.将趋近律引入到(1)阶段设计中,对(2)阶段设计快速终端滑模。2.“全局”、“快速”、“终端滑模”中的“全局”表示滑模没有(1)阶段,因此不使用趋近定律。
4个基本趋近律表达如下:
(1)等速趋近律:
(2)指数趋近律

(3)幂次趋近律

(4)一般趋近律

3基于指数趋近律的模糊滑模控制
3.1 基于指数趋近律的滑模控制
由牛顿欧拉公式得n自由度机器人关节空间动力学方程为:
设系统误差为:

则误差的微分得:

选择滑模函数为:
则对滑模函数s求导得:
因为系统方程可变形为:

所以:

选取指数趋近律为:
所以基于指数趋近律可设计u,将两公式合并:

则控制律u为:

已知只要得到滑模平面(切换面s)和滑动模态的控制律u,滑动变结构控制就能完全建立起来。
下面证明其滑模平面稳定存在滑动模态:
第一步:取李雅普诺夫函数

由于
所以V是正定(PD)
第二步:对李雅普诺夫函数求导得:

由此可知,上述设计的滑模变结构控制器满足要求。
为更直观的分析所设计的滑模控制器的优劣,对控制系统进行仿真分析如下:
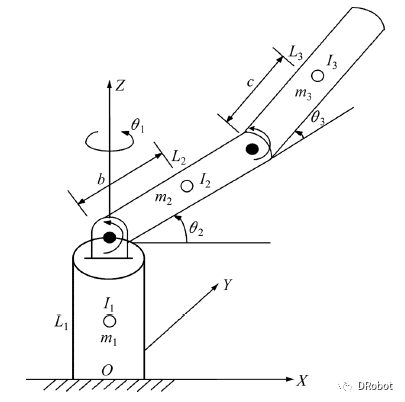
图1.三自由度机械臂
根据拉格朗日功能平衡法,建立其动力学模型。由于是比较常见的三自由度机器人模型,这里可以查找教科书或文献参考
MATLAB仿真程序
其simulink建模框图如图2所示:
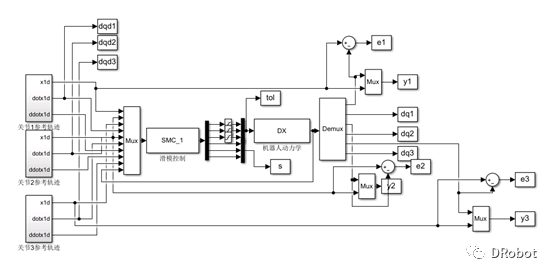
图2 控制系统simulink框图
机器人动力学MATLAB仿真程序:
function [sys,x0,str,ts]=s_function(t,x,u,flag)switch flag,case 0,[sys,x0,str,ts]=mdlInitializeSizes;case 1,sys=mdlDerivatives(t,x,u);case 3,sys=mdlOutputs(t,x,u);case {2, 4, 9 }sys = [];otherwiseerror(['Unhandled flag = ',num2str(flag)]);endfunction [sys,x0,str,ts]=mdlInitializeSizessizes = simsizes;sizes.NumContStates = 6;sizes.NumDiscStates = 0;sizes.NumOutputs = 6;sizes.NumInputs = 3;sizes.DirFeedthrough = 0;sizes.NumSampleTimes = 0;sys=simsizes(sizes);x0=[0.6;0.3;0.5;0.5;0.5;0.5];str=[];ts=[];function sys=mdlDerivatives(t,x,u)q1=x(1);dq1=x(2);q2=x(3);dq2=x(4);q3=x(5);dq3=x(6);m1=0;m2=1;m3=1;L1=0;L2=1;L3=1;g=10;I1=0;I2=0;I3=0;a1=m2*L2^2+m3*L2^2;a2=m3*L3^2;a3=m3*L3^2;b1=(m2*L2+m3*L2)*g;b2=m3*L3*g;M11=I1+a1*(cos(q2))^2+a2*cos(q2+q3)+2*a2*cos(q2)*cos(q2+q3);M12=0;M13=0;M21=0;M22=I2+a1+a2+2*a3*cos(q3);M23=a2+a3*cos(q3);M31=0;M32=a2+a3*cos(q3);M33=I3+a2;M=[M11 M12 M13;M21 M22 M23;M31 M32 M33];B11=-(1/2)*a1*dq2*sin(2*q2)-a3*dq3*cos(q2)*sin(q2+q3)-(1/2)*a2*(dq2+dq3)*sin(2*q2+2*q3)-a3*dq2*sin(2*q2+q3);B12=-(1/2)*a1*dq1*sin(2*q2)-a3*dq1*sin(2*q2+q3)-(1/2)*a2*dq1*sin(2*q2+2*q3);B13=-a3*dq1*cos(q2)*sin(q2+q3)-(1/2)*a1*dq1*sin(2*q2+2*q3);B21=-B12;B22=-a3*dq3*sin(q3);B23=-a3*(dq2+dq3)*sin(q3);B31=-B13;B32=-a3*dq2*sin(q3);B33=0;B=[B11 B12 B13;B21 B22 B23;B31 B32 B33];G1=0;G2=b1*cos(q2)+b2*cos(q2+q3);G3=b2*cos(q2+q3);G=[G1;G2;G3];tol(1)=u(1);tol(2)=u(2);tol(3)=u(3);ddq=inv(M)*(tol'-B*[dq1;dq2;dq3]-G);sys(1)=x(2);sys(2)=ddq(1);sys(3)=x(4);sys(4)=ddq(2);sys(5)=x(6);sys(6)=ddq(3);function sys=mdlOutputs(t,x,u)sys(1)=x(1);sys(2)=x(2);sys(3)=x(3);sys(4)=x(4);sys(5)=x(5);sys(6)=x(6);
则各关节跟踪响应如图3所示

图3.各关节跟踪响应
轨迹跟踪误差如图4所示

图4.轨迹跟踪误差
滑模面如图5所示
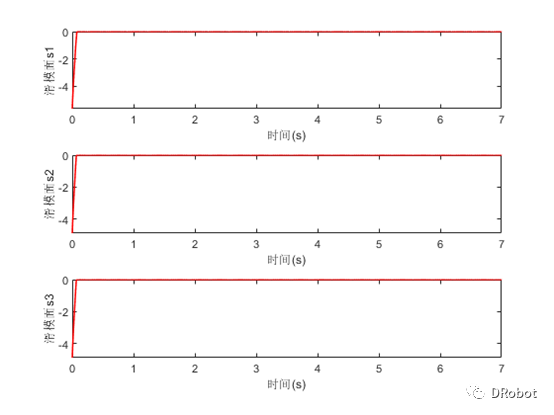
图5.滑模面
控制力矩如图6所示
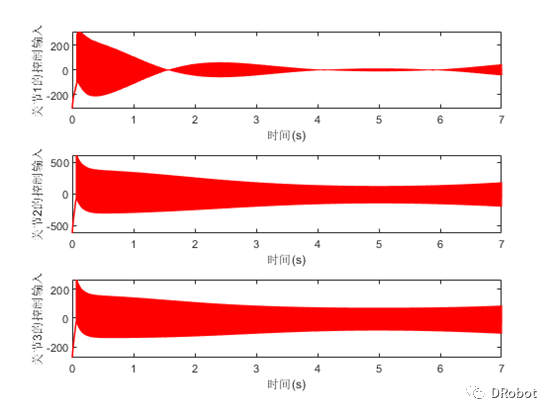
图6.控制力矩
总结
由以上仿真结果可以看出,基于趋近律的滑模轨迹跟踪控制器在系统复杂的环境下,能够对系统的轨迹跟踪进行有效的控制,然而,其基于趋近律的滑模轨迹跟踪控制方法存在着严重的抖振,还是有待改进!
更多信息请关注:DRobot
相关文章:
基于指数趋近律的机器人滑模轨迹跟踪控制算法及MATLAB仿真
机械手是工业制造领域中应用最广泛的自动化机械设备,广泛应用于工业制造、医疗、军工、半导体制造、太空探索等领域。它们虽然形式不同,但都有一个共同的特点,即能够接受指令,并能准确定位到三维(或二维)空间的某一点进行工作。由…...
华为云API自然语言处理的魅力—AI情感分析、文本分析
云服务、API、SDK,调试,查看,我都行 阅读短文您可以学习到:人工智能AI自言语言的情感分析、文本分词、文本翻译 1 IntelliJ IDEA 之API插件介绍 API插件支持 VS Code IDE、IntelliJ IDEA等平台、以及华为云自研 CodeArts IDE&a…...

微擎小程序获取不到头像和昵称解决方案
这是一个使用微擎小程序的代码示例,其中包含了获取用户头像和昵称的功能。以下是解决方案: 首先,在<button>标签上添加open-type"chooseAvatar"属性,并绑定bindchooseavatar事件: <button class&qu…...
Qt 对界面类重命名的步骤
有些时候因为一些原因,需要修改Qt中创建的界面类,修改的地方比较多,一定要留意有没有修改完全,否则会出现各种奇怪报错。 比如,将MainWindow界面类名修改为lb_logdisplay 修改步骤: 修改文件名:…...
使用docker搭建nacos单机、集群 + mysql
单机搭建 1 拉取mysql镜像 docker pull mysql:5.7.40 2 启动mysql容器 docker run -d --namemysql-server -p 3306:3306 -v mysql-data:/var/lib/mysql -e MYSQL_ROOT_PASSWORD123456 mysql:5.7.40 3 执行nacos的数据库脚本 /* * Copyright 1999-2018 Alibaba Group Holding L…...
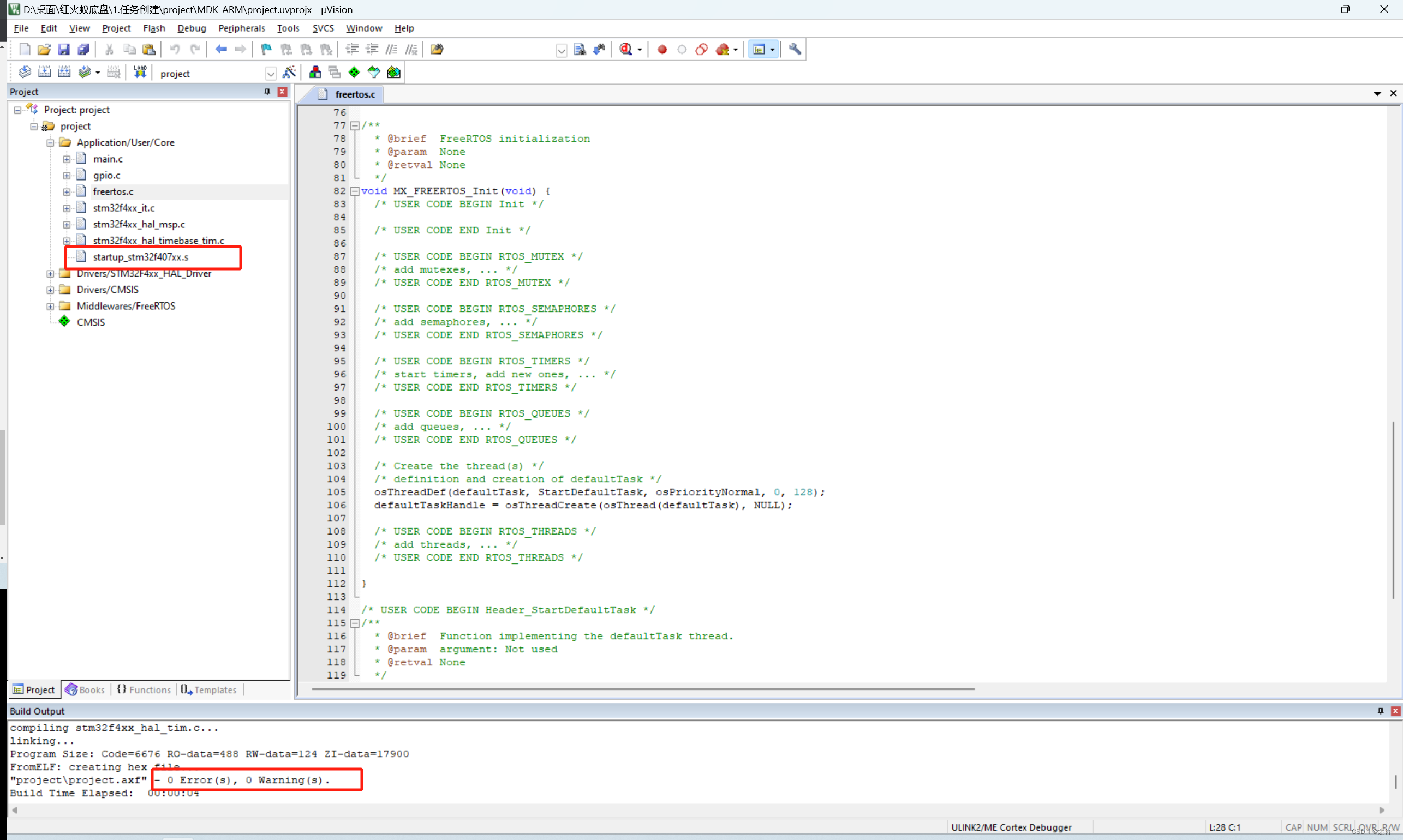
FreeRTOS自我救赎2之基本工程建立
System Core 1.System Core >SYS 2.System Core >RCC 3.System Core >NVIC Middleware Middleware >FREERTOS Clock configuration Project Manager 在编译生成的代码前需要找一个与芯片对应的启动文件,启动文件添加进来,编译就没问题了...
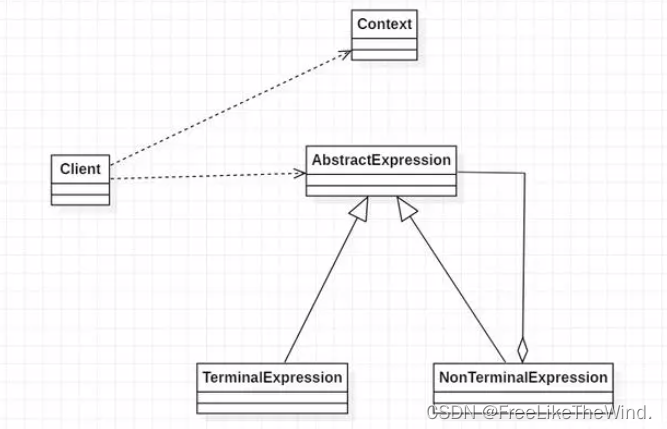
【C++设计模式之解释器模式:行为型】分析及示例
简介 解释器模式(Interpreter Pattern)是一种行为型设计模式,它提供了一种解决问题的方法,通过定义语言的文法规则,解释并执行特定的语言表达式。 解释器模式通过使用表达式和解释器,将文法规则中的句子逐…...
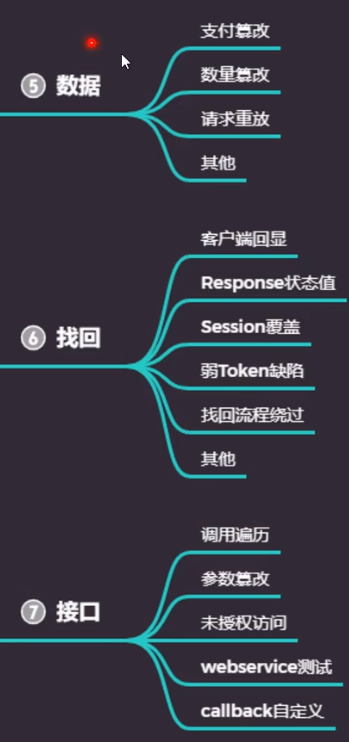
35 WEB漏洞-逻辑越权之找回机制及接口安全
目录 找回重置机制接口调用乱用演示案例绑定手机验证码逻辑-Rep状态值篡改-实例某APP短信轰炸接口乱用-实例接口调用发包 文章分享:https://www.cnblogs.com/zhengna/p/15655691.html 有支付接口、短信发送接口,邮箱的发送接口等等,在接口这…...
黑豹程序员-架构师学习路线图-百科:JSON替代XML
文章目录 1、数据交换之王2、XML的起源3、JSON诞生4、什么是JSON 1、数据交换之王 最早多个软件之间使用txt进行信息交互,缺点:纯文本,无法了解其结构;之后使用信令,如:电话的信令(拨号、接听、…...
)
考研人考研魂——英语单词篇(20231009)
下一站,上岸 consoleconsistentconsistconstituteconstitutionconstituentconstructdistinctdistinguishdistinctionconstantconstrainfruitfulfulfillfundfunctionfrustrateevidencefundamentalevilevidentenvironmententertainmententertainenterprisemonotonousm…...
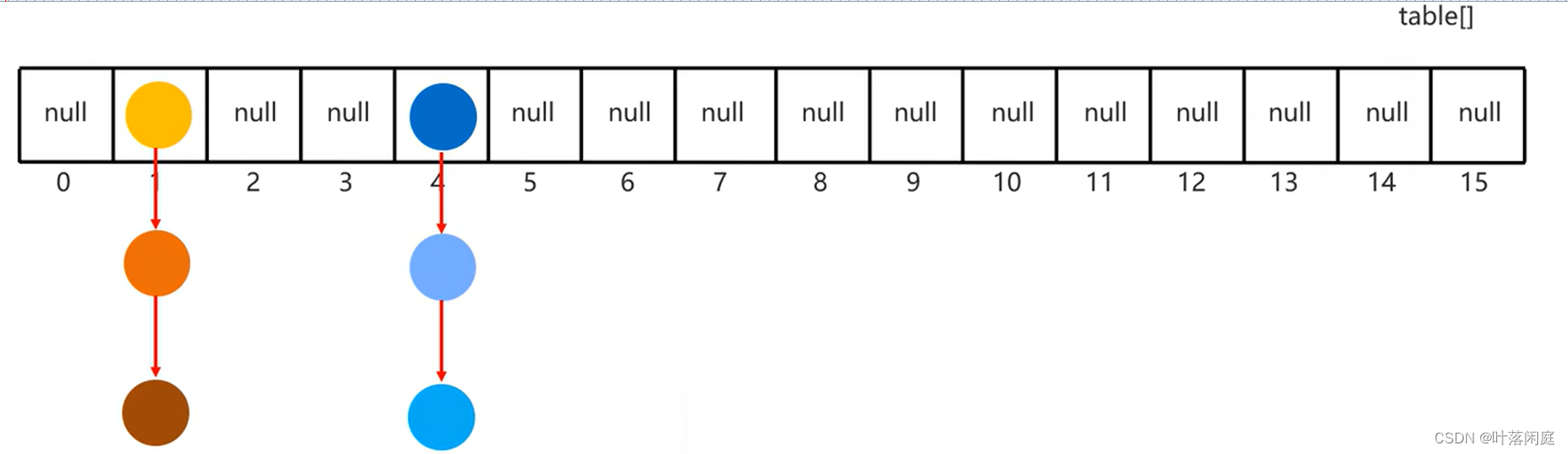
【数据结构】HashSet的底层数据结构
🐌个人主页: 🐌 叶落闲庭 💨我的专栏:💨 c语言 数据结构 javaEE 操作系统 Redis 石可破也,而不可夺坚;丹可磨也,而不可夺赤。 HashSet 一、 HashSet 集合的底层数据结构二…...
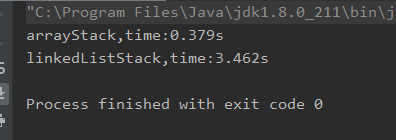
数据结构与算法(七)--使用链表实现栈
一、前言 之前我们已经学习了链表的所有操作及其时间复杂度分析,我们可以了解到对于链表头的相关操作基本都是O(1)的,例如链表头增加、删除元素,查询元素等等。那我们其实有一个数据结构其实可以完美利用到这些操作的特点,都是在…...

分布式事务详解
摘要 分布式事务主要包括2pc、3pc、消息事务。 2pc指两阶段提交: 第一阶段是准备阶段:所有事务参与者检查执行能力并锁定对应资源,准备完成后将状态告知协调者。第二集段是提交状态:事务参与者全部准备好后,协调者发…...

车载通信架构 —— DDS协议介绍
车载通信架构 —— DDS协议介绍 我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。 老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师: 屏蔽力是信息过载时代一个人的特殊竞争力,任何消耗你的人和…...

nginx根据不同的客户端设备进行转发请求——筑梦之路
这里主要介绍七层负载方式实现。 环境说明: pc端 web-1 苹果ios端 web-2 安卓Android端 web-3 负载均衡 web-lb 配置示例: pc端: server {listen 9000; #监听9000server_name pc.xxx.com;charset utf-8;location / {root /…...
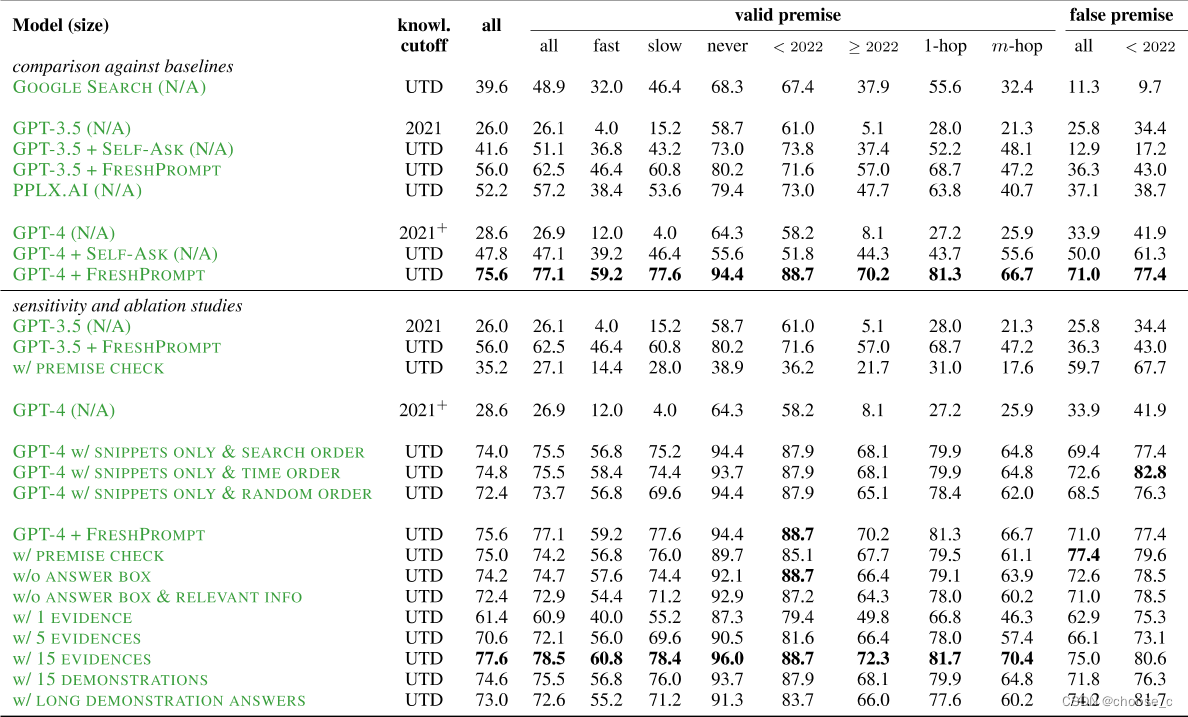
增强LLM:使用搜索引擎缓解大模型幻觉问题
论文题目:FRESHLLMS:REFRESHING LARGE LANGUAGE MODELS WITH SEARCH ENGINE AUGMENTATION 论文地址:https://arxiv.org/pdf/2310.03214.pdf 论文由Google、University of Massachusetts Amherst、OpenAI联合发布。 大部分大语言模型只会训练一次&#…...
WPF向Avalonia迁移(一、一些通用迁移项目)
通用变更 WPF:Visibility 其他参考文档 WPF: <TextBlock Visibility"Visible"/><TextBlock Visibility"Collapsed"/><TextBlock Visibility"Hidden"/>Avalonia : <TextBlock IsVisib…...
lua学习笔记
单行注释: 多行注释: 命名: Lua不支持下划线大写字母,比如:_ABC 但支持:_abc 关键字: 全局变量: 直接变量名 内容就是全局 局部变量: 加上local即可 nil࿱…...

修改 ModelScope 默认缓存路径
修改 ModelScope 默认缓存路径 设置 MODELSCOPE_CACHE 和 MODELSCOPE_MODULES_CACHE 两个环境变量。 export MODELSCOPE_CACHE<your_favourite_path>/hub export MODELSCOPE_MODULES_CACHE<your_favourite_path>/modelscope_modules完结!...

【ES实战】索引别名的使用说明
索引别名 文章目录 索引别名带有过滤器的别名RoutingWrite Index REST单一添加一个别名示例: 索引创建是增加别名删除别名检索现有别名示例: 索引别名可以通过API的方式进行操作一个索引别名可以映射到一个或一个以上的索引索引名和索引别名不能重复,在集群中都是唯…...

开源监控面板OpenClaw:从架构设计到生产部署实战指南
1. 项目概述:一个开源监控面板的诞生 在运维和开发的世界里,监控面板就像是驾驶舱里的仪表盘。没有它,你就是在盲飞。今天要聊的这个项目 xingrz/openclaw-dashboard ,就是一个由社区驱动的开源监控面板解决方案。它的名字很有意…...

保姆级教程:用CH34xSerCfg修改USB转串口芯片的VID/PID,解决驱动冲突和串口号固定问题
嵌入式开发实战:用CH34xSerCfg定制USB转串口设备标识与驱动管理 当你的工作台上同时连接着五个相同型号的USB转TTL模块,Windows设备管理器里COM端口像走马灯一样随机变换编号时;当团队协作开发中,每个成员需要固定识别自己的调试设…...

杰理701N可视化SDK:从stream.bin生成到工程导入的EQ调音闭环
1. 杰理701N可视化SDK与EQ调音基础 第一次接触杰理701N的开发者可能会好奇,这个可视化SDK到底能做什么?简单来说,它就像给声学工程师配了一把"声音雕刻刀"。通过图形化界面,你可以实时调整蓝牙耳机、音箱等设备的音效表…...

如何用Sunshine打造个人游戏云:终极自托管游戏串流解决方案
如何用Sunshine打造个人游戏云:终极自托管游戏串流解决方案 【免费下载链接】Sunshine Self-hosted game stream host for Moonlight. 项目地址: https://gitcode.com/GitHub_Trending/su/Sunshine 你是否曾经梦想在任何设备上畅玩PC游戏?无论是想…...

基于轨道模型构建现代化流程编排系统:从概念到实践
1. 项目概述与核心价值最近在GitHub上看到一个挺有意思的项目,叫s4kuraN4gi/orbit-app。乍一看这个仓库名,可能很多人会有点懵,不知道它具体是做什么的。我花了一些时间深入研究,发现这是一个围绕“轨道”概念构建的现代化应用。这…...

JetBrains IDE 30天试用重置:一键解决方案的完整实践指南
JetBrains IDE 30天试用重置:一键解决方案的完整实践指南 【免费下载链接】ide-eval-resetter 项目地址: https://gitcode.com/gh_mirrors/id/ide-eval-resetter 当您正专注于代码调试时,IDE突然弹出"评估期已结束"的红色警告…...

阴阳师自动化脚本OAS终极指南:轻松解放双手的完整教程
阴阳师自动化脚本OAS终极指南:轻松解放双手的完整教程 【免费下载链接】OnmyojiAutoScript Onmyoji Auto Script | 阴阳师脚本 项目地址: https://gitcode.com/gh_mirrors/on/OnmyojiAutoScript 阴阳师自动化脚本OAS是一款专门为《阴阳师》游戏设计的智能自动…...

模拟电路布局优化:多智能体强化学习实践
1. 模拟电路布局优化的挑战与机遇在集成电路设计领域,模拟电路布局一直是个令人头疼的问题。作为一名从业十余年的模拟电路设计师,我深刻体会到传统布局方法在面对现代工艺挑战时的局限性。每次手工调整晶体管位置时,那种"差之毫厘&…...

本地化AI代码助手LLMDog:模块化框架与开源模型集成实践
1. 项目概述:一个为开发者设计的本地化AI代码助手最近在GitHub上闲逛,发现了一个挺有意思的项目叫“LLMDog”,作者是doganarif。乍一看这个名字,可能会联想到“AI狗”或者某种宠物,但它的全称其实是“Large Language M…...

Apache Burr:用状态机模式构建Python流式应用
1. 项目概述:一个用于构建流式应用的Python框架最近在折腾一些实时数据处理和模型推理的项目,从简单的日志分析到复杂的在线推荐,总感觉现有的工具链要么太重,要么太散。想要一个既能处理流式数据,又能轻松集成机器学习…...