【管理运筹学】第 9 章 | 网络计划(2,时间参数的计算 —— 工作时间的确定与事项的时间参数)
文章目录
- 引言
- 一、工作时间的确定
- 二、事项的时间参数
- 2.1 事项的最早开始时间
- 2.2 事项的最迟结束时间
- 2.3 事项的时差
- 2.4 利用事项的时间参数来确定关键线路
引言
计算网络图中有关的时间参数,主要目的是找到关键线路,为网络计划的优化、调增和执行提供明确的时间概念。
网络图的时间参数,包括工作所需时间、事项最早、最迟时间、工作的最早、最迟时间及时差等等。进行时间参数的计算不仅可以得到关键线路,确定和控制整个任务在正常进度下的最早完工期,而且在掌握非关键工作基础上可进行人、财、物等资源的合理安排,进行网络计划的优化。
一、工作时间的确定
工作 ( i , j ) (i,j) (i,j) 的所需工时可记为 t ( i , j ) t(i,j) t(i,j) ,有以下两种确定办法。
(1)确定型网络。在具备工时定额和劳动定额的任务中,工作的工时 t ( i , j ) t(i,j) t(i,j) 可以用这些定额资料确定。有些工作虽然无定额可查,但也可以通过分析有关工作的统计资料来确定。
(2)概率型网络。对于开发性、试制性的任务,往往不具备(1)中的资料,可以采用三点时间估计法来确定工作的工时。这种方法需要先作出下面三种情况的时间估计:
a a a —— 最快可能完成时间(最乐观时间); m m m 最可能完成时间; b b b 最慢可能完成时间(最悲观时间)。
利用 3 个时间 a , b , m a,b,m a,b,m 每项工作的期望工时可估计为 t ( i , j ) = a + 4 m + b 6 . t(i,j)=\frac{a+4m+b}{6}. t(i,j)=6a+4m+b. 方差估计为 σ 2 = ( b − a 6 ) 2 . \sigma_2=\big(\frac{b-a}{6}\big)^2. σ2=(6b−a)2. 华罗庚教授对上述两个式子的由来有以下说明:由实际工作情况表明,工作进行时出现最顺利和最不顺利的情况都比较少,更多的是在最可能完成的时间内完成,工时的分布近似服从正态分布。假定 m m m 的可能性两倍于 a a a 或 b b b 的可能性,应用加权平均法。
在 ( a , m ) (a,m) (a,m) 之间的可能性均值为 ( a + 2 m ) / 3 (a+2m)/3 (a+2m)/3 ,在 ( m , b ) (m,b) (m,b) 之间的可能性均值为 ( 2 m + b ) / 3 (2m+b)/3 (2m+b)/3 ,则工时可以用上述两种情况各 0.5 的概率分布来描述,计算其期望和方差即可到上述两式。
关于工作的其他时间参数计算原则和上述类似。
二、事项的时间参数
事项本身并不占用时间,它只表示某项工作应在某一时刻开始或结束。对箭尾事项来说,它表示以此事项为起始的各项工作的开始,因而存在最早可能开始的时间;对箭头事项来说,它表示以此事项为完结的各项工作的结束,因而存在最迟必须结束的时间。可见,事项的时间参数有事项的最早开始时间、最迟结束时间以及二者的差值 —— 事项的时差。
2.1 事项的最早开始时间
事项的最早开始时间,是指的从该事项开始的各项工作的最早开工时间。事项 i i i 的最早开始时间用 t E ( i ) t_E(i) tE(i) 表示, E E E 表示 early 吧。
事项的最早开始时间是从网络图的起始事项算起,按照事项的编号顺序,从小到大,逐个计算,直到终止事项为止。一般地,指定网络起始事项的最早开始时间为 0 ,即 t E ( 1 ) = 0 t_E(1)=0 tE(1)=0 。
其他事项的最早开始时间都是相对于起始事项在零时刻开始的时间,计算公式为 t E ( j ) = max { t E ( i ) + t ( i , j ) ∣ i 为射入 j 事项的箭线的箭尾事项的编号 } ( j = 2 , 3 , ⋯ , n ) t_E(j)=\max\{t_E(i)+t(i,j) \big| i 为射入j事项的箭线的箭尾事项的编号\}(j=2,3,\cdots,n) tE(j)=max{tE(i)+t(i,j) i为射入j事项的箭线的箭尾事项的编号}(j=2,3,⋯,n) 事项的最早开始时间算出后,写在网络图上该事项的上方或下方,用方框 [ ] [] [] 框起来表示,里面写上最早开始时间。
假设网络计划图如下图所示(图片来源:知乎-运筹说)。

则各事项的最早开始时间为: t E ( 1 ) = 0 , t E ( 2 ) = t E ( 1 ) + t ( 1 , 2 ) = 0 + 4 = 4 , t E ( 3 ) = t E ( 2 ) + t ( 2 , 3 ) = 4 + 6 = 10 , t E ( 4 ) = max { t E ( 2 ) + t ( 2 , 4 ) , t E ( 3 ) + t ( 3 , 4 ) } = max { 4 + 3 , 10 + 8 } = 18 , ⋯ , t E ( 10 ) = 32 t_E(1)=0,t_E(2)=t_E(1)+t(1,2)=0+4=4,t_E(3)=t_E(2)+t(2,3)=4+6=10,t_E(4)=\max\{t_E(2)+t(2,4),t_E(3)+t(3,4)\}=\max\{4+3,10+8\}=18,\cdots, t_E(10)=32 tE(1)=0,tE(2)=tE(1)+t(1,2)=0+4=4,tE(3)=tE(2)+t(2,3)=4+6=10,tE(4)=max{tE(2)+t(2,4),tE(3)+t(3,4)}=max{4+3,10+8}=18,⋯,tE(10)=32 。
2.2 事项的最迟结束时间
事项的最迟结束时间是指,在不拖延总工期的前提下,以该事项为结束的各项工作最迟必须完成的时间。用 t L ( i ) t_L(i) tL(i) 表示事项 i i i 的最迟结束时间。
事项的最迟结束时间是从网络图的终止事项算起,按照事项编号的逆序,由大到小,逐个计算,知道起始事项为止。因为网络图的终止事项无后续工作,而且事项本身又不占时间,所以网络图的终止事项的最迟结束时间与它的最早开始时间应该相等,即 t E ( n ) = t L ( n ) t_E(n)=t_L(n) tE(n)=tL(n) 。
如果对某项工程或任务有规定的完成时间要求,终止事项的最迟结束时间应取这个时间值 —— 规定的目标工期。
各事项最迟结束时间计算方法为: t L ( i ) = min { t L ( j ) − t ( i , j ) ∣ j 为从 i 事项射出的箭线的箭头事项编号 } ( i = n − 1 , n − 2 , ⋯ , 1 ) t_L(i)=\min\{t_L(j)-t(i,j)\big|j为从i事项射出的箭线的箭头事项编号\}(i=n-1,n-2,\cdots,1) tL(i)=min{tL(j)−t(i,j) j为从i事项射出的箭线的箭头事项编号}(i=n−1,n−2,⋯,1) 事项的最迟结束时间算出后,写在网络图中该事项最早开始时间右侧的近旁,用 △ \triangle △ 框起来。
上面的例子中,各事项的最迟结束时间为: t L ( 10 ) = 32 , t L ( 9 ) = 31 , t L ( 8 ) = 26 , t L ( 7 ) = min { t L ( 9 ) − t ( 7 , 9 ) , t L ( 8 ) − t ( 7 , 8 ) } = min { 31 − 8 , 26 − 2 } = 23 , ⋯ , t L ( 1 ) = 0 t_L(10)=32,t_L(9)=31,t_L(8)=26,t_L(7)=\min\{t_L(9)-t(7,9),t_L(8)-t(7,8)\}=\min\{31-8,26-2\}=23,\cdots,t_L(1)=0 tL(10)=32,tL(9)=31,tL(8)=26,tL(7)=min{tL(9)−t(7,9),tL(8)−t(7,8)}=min{31−8,26−2}=23,⋯,tL(1)=0 。
2.3 事项的时差
事项的时差又称事项的机动时间、事项的宽裕时间,是指在不影响总工期按时完成时,该事项可以推迟的最大机动时间。计算方法为 Δ t ( i ) = t L ( i ) − t E ( i ) \Delta t(i)=t_L(i)-t_E(i) Δt(i)=tL(i)−tE(i) 。特别地,时差为 0 的事项称为关键事项。时差一般不标在网络图上,很轻易就能计算出来。
2.4 利用事项的时间参数来确定关键线路
把网络图中所有线路的路长都计算出来,找到最大的那一条即为关键线路,这种方法称为穷举法。
还有一种利用事项的时间参数来寻找关键线路的方法:连接关键事项的工作若满足: t E ( j ) − t E ( i ) = t L ( j ) − t L ( i ) = t ( i , j ) t_E(j)-t_E(i)=t_L(j)-t_L(i)=t(i,j) tE(j)−tE(i)=tL(j)−tL(i)=t(i,j) 则由此形成的线路即为关键线路。
相关文章:
【管理运筹学】第 9 章 | 网络计划(2,时间参数的计算 —— 工作时间的确定与事项的时间参数)
文章目录 引言一、工作时间的确定二、事项的时间参数2.1 事项的最早开始时间2.2 事项的最迟结束时间2.3 事项的时差2.4 利用事项的时间参数来确定关键线路 引言 计算网络图中有关的时间参数,主要目的是找到关键线路,为网络计划的优化、调增和执行提供明…...
英语——方法篇——单词——羊肉串记忆法——单词密码
在记忆英语单词的时候,我们习惯于一个字母一个字母地记忆,很少会以词或字母组合为单位来记忆。在这里我们要打开视野,学习以词或字母组合为单位,一组一组地记忆英语单词。英语单词数目庞大,但是构成单词的字母只有26个…...

【m98】视频帧的 jitterbuffer 1:
VCMJitterBuffer D:\XTRANS\m98_rtc\rtc-webrtc\src\modules\video_coding\jitter_buffer.h使用2个map和一个list管理VCMFrameBuffer 指针对象:UnorderedFrameList free_frames_ RTC_GUARDED_BY(mutex_);FrameList decodable_frames_ RTC_GUARDED_BY(mutex_);FrameList incomp…...

javascript中map和filter的区别与联系
javascript中map和filter的区别与联系如何获取对象数组中某个值 javascript中map和filter的区别与联系 在 JavaScript 中,map 和 filter 是两个常用的数组方法,用于对数组进行转换和过滤操作。它们的区别和联系如下: 功能不同: m…...
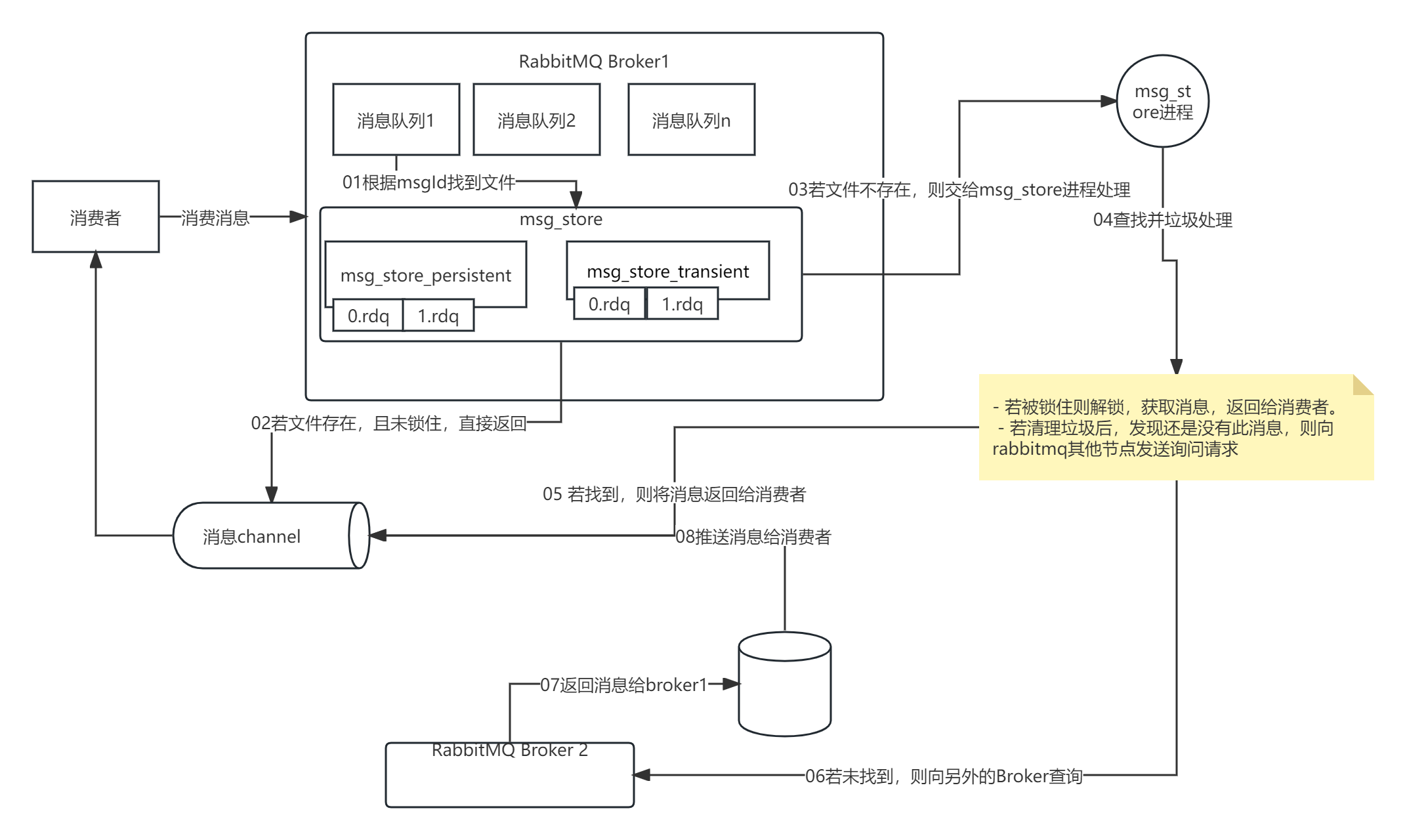
【RabbitMQ 实战】10 消息持久化和存储原理
一、持久化 1.1 持久化对象 rabbitmq的持久化分为三个部分: 交换器的持久化。队列的持久化。消息的持久化。 1.1.1 交换器持久化 交换器的持久化是通过在声明交换器时, 指定Durability参数为durable实现的。若交换器不设置持久化,在rabb…...
vscode 连接ubuntu git下载缓慢
在ubuntu20.04下载: git clone https://github.com/introlab/rtabmap.git src/rtabmap 挂掉情况 export https_proxyhttp://10.10.10.176:7890export http_proxyhttp://10.10.10.176:7890 其中 10.10.10.176是我本机的ip地址,7890是我的代理后几位 如…...

2731. 移动机器人
2731. 移动机器人有一些机器人分布在一条无限长的数轴上,他们初始坐标用一个下标从 0 开始的整数数组 nums 表示。当你给机器人下达命令时,它们以每秒钟一单位的速度开始移动。 给你一个字符串 s ,每个字符按顺序分别表示每个机器人移动的方…...

小程序实现人脸识别功能
调用api wx.startFacialRecognitionVerify 第一步: // 修改方法expertUpdate() {wx.startFacialRecognitionVerify({name: _this.registerForm.realName, //身份证名称idCardNumber: _this.registerForm.idCard, //身份证号码checkAliveType: 1, //屏幕闪烁(人脸核验的交互…...

【】javax.crypto.IllegalBlockSizeException: Input length not multiple of 8 bytes
问题描述 jdk版本:8 用DES进行加解密,其中转换模式为“DES/CBC/NoPadding”,要加密的明文为 “密码学浅析”,执行加密操作,报如下错误 Exception in thread "main" javax.crypto.IllegalBlockSizeExcepti…...

312.戳气球
将戳气球转换到添加气球,记忆搜索slove(i,j):在开区间(i,j)全部填满气球得到的最多硬币数,两端val[i]、val[j] class Solution { public:vector<vector<int>> ans;vector<int> val;int slove(int left,int right){if(left&…...

get_trade_detail_data函数使用
查阅股票持仓情况 positions get_trade_detail_data(‘8000000213’, ‘stock’, ‘position’) for dt in positions: print(f’股票代码: {dt.m_strInstrumentID}, 市场类型: {dt.m_strExchangeID}, 证券名称: {dt.m_strInstrumentName}, 持仓量: {dt.m_nVolume}, 可用数量:…...
【融合ChatGPT等AI模型】Python-GEE遥感云大数据分析、管理与可视化及多领域案例实践应用
目录 第一章 理论基础 第二章 开发环境搭建 第三章 遥感大数据处理基础与ChatGPT等AI模型交互 第四章 典型案例操作实践 第五章 输入输出及数据资产高效管理 第六章 云端数据论文出版级可视化 更多应用 随着航空、航天、近地空间等多个遥感平台的不断发展,近…...
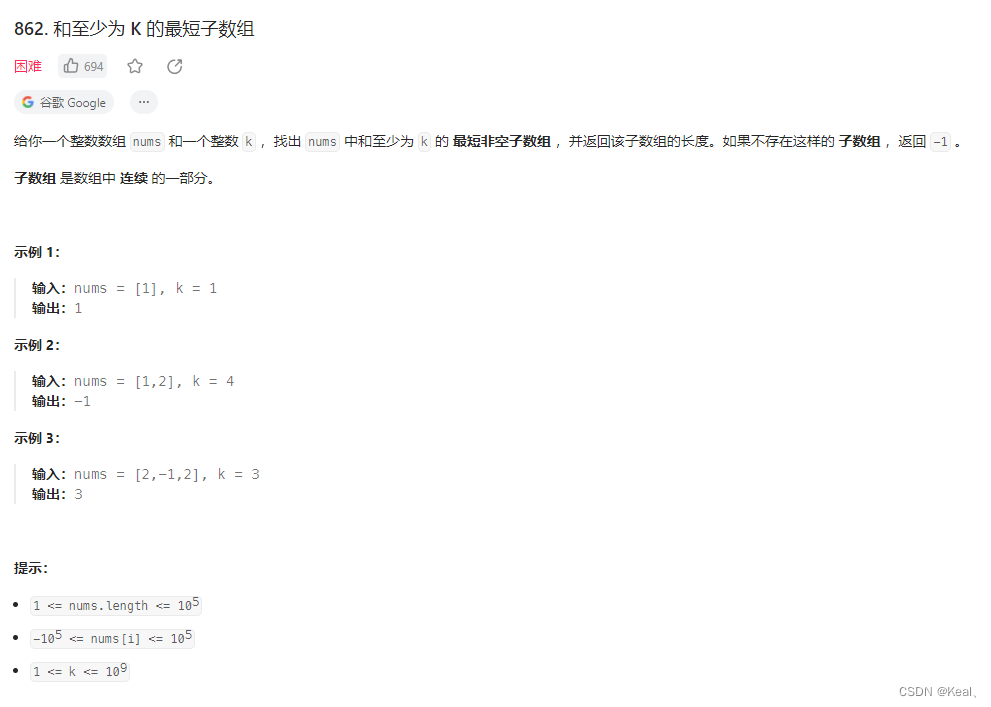
LeetCode862 和至少为k的最短子数组
题目: 解析: 1、先构造前缀和数组 2、单调队列存放滑动窗口,目的求Sj-Si >k的情况下,窗口最小。 代码: class Solution {public int shortestSubarray(int[] nums, int k) {int n nums.length;long[] sums new …...

网卡bonding模式 - bond模式配置介绍
网卡bonding简介 网卡绑定就是把多张物理网卡通过软件虚拟成一个虚拟的网卡,配置完毕后,所有的物理网卡的ip和mac将会变成相同的。多网卡同时工作可以提高网络速度,还可以实现网卡的负载均衡、冗余。 bonding模式 1 round-robin(mode0) 轮转…...

做了个 chrome 插件实现 B 站视频截图功能,直接从当前视频帧无损复制
起因是看 B 站视频想截个图很麻烦,右下角暂停按钮无法去除,于是写了一行代码把暂停按钮隐藏。 后经提醒,发现可以通过 canvas 获取视频帧来截取图片,于是写了如下代码完美获取视频帧。 var v document.querySelector(".bpx…...

Docker linux 安装
sudo yum update sudo yum clean all sudo yum makecache#安装依赖 sudo yum install -y yum-utils device-mapper-persistent-data lvm2 #添加官方存储库 sudo yum-config-manager --add-repo https://download.docker.com/linux/centos/docker-ce.repo#安装-跳过一些异常依赖…...
windows部署django服务器
windows部署django服务器 1、安装IIS1.1 控制面板-----程序----程序和功能----启用或关闭windows功能1.2安装IIS服务器,完成后,重新进入,把CGI安装进系统 2、安装python与虚拟环境2.1 安装python2.2 安装virtualenv虚拟环境2.3 创建一个虚拟环…...

ChatGPT prompt汇总-个人使用-持续更新....
用途 学术写作更新记录 学术写作 中译英(GPT-4) I am a researcher studying deep learning and now trying to revise my manuscript which will be submitted to the Journal of Nature . I want you to act as a scientific English-Chinese translator, I will provide yo…...
Vue实现简单的接口封装
1. 在src中创建一个api文件夹 2. 按功能、模块等新建对应的js文件 3. 在内部写对应的封装接口,并导出 import axios from "axios";/*** 接口名称:* 接收参数:* 返回参数:* */export const miens ()>{return new P…...

软件测试工具有什么作用?有哪些好用的测试工具推荐?
软件测试工具是现代软件测试中不可或缺的重要组成部分,指的是一系列在软件开发过程中使用的工具,用于帮助测试人员进行测试活动,提高测试效率,减少测试成本。选择并使用合适的软件测试工具,可提高软件质量和效率。 一…...

D3KeyHelper:暗黑3玩家的智能按键助手,告别重复操作疲劳
D3KeyHelper:暗黑3玩家的智能按键助手,告别重复操作疲劳 【免费下载链接】D3keyHelper D3KeyHelper是一个有图形界面,可自定义配置的暗黑3鼠标宏工具。 项目地址: https://gitcode.com/gh_mirrors/d3/D3keyHelper 你是否曾在《暗黑破坏…...

WPF虚拟桌宠组件:可嵌入、高性能、工程化UI生命体
1. 这不是“桌面宠物”,而是一个可嵌入的WPF UI组件化生命体你可能在Windows XP时代见过那只晃着尾巴、偶尔打哈欠的3D小猫,也可能在Win10系统托盘里点开过一个会眨眼的像素狐狸——但那些是独立进程、是系统级小工具、是“看一眼就关掉”的轻量娱乐。而…...

Taotoken如何帮助教育科技产品实现个性化学习辅导
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken如何帮助教育科技产品实现个性化学习辅导 1. 场景与挑战 教育科技公司在开发个性化学习助手时,常常面临一个核…...

如何快速解锁艾尔登法环帧率限制:终极性能优化指南
如何快速解锁艾尔登法环帧率限制:终极性能优化指南 【免费下载链接】EldenRingFpsUnlockAndMore A small utility to remove frame rate limit, change FOV, add widescreen support and more for Elden Ring 项目地址: https://gitcode.com/gh_mirrors/el/EldenR…...

Unity项目DrawCall降不下来?试试用Mesh Baker合并贴图集,保姆级图文教程
Unity性能优化实战:用Mesh Baker合并贴图集降低DrawCall全流程解析当你的Unity项目帧率开始卡顿,Profiler里DrawCall数字居高不下时,合并贴图集往往是解决问题的关键一步。本文将以一个实际项目为例,带你从零开始使用Mesh Baker的…...

【DeepSeek灰度发布黄金法则】:20年SRE亲授7步零故障上线实战框架
更多请点击: https://intelliparadigm.com 第一章:DeepSeek灰度发布策略全景图 DeepSeek模型服务的灰度发布并非简单的流量切分,而是一套融合可观测性、渐进式验证与多维熔断机制的工程化闭环体系。其核心目标是在保障线上推理稳定性的同时&…...

告别漫长等待:UE5.2.1 Windows打包效率优化与插件问题排查指南
告别漫长等待:UE5.2.1 Windows打包效率优化与插件问题排查指南第一次点击"打包项目"按钮时,进度条仿佛被冻结的场景,每个UE5开发者都经历过。尤其当项目规模达到数十GB时,等待时间可能超过一小时——这背后隐藏着引擎底…...

基于Cynthion逆向USB协议,为DP100电源开发Linux控制软件
1. 项目概述:用Cynthion嗅探USB,为DP100电源打造Linux软件作为一名长期在Linux环境下折腾硬件和嵌入式开发的爱好者,我经常遇到一个头疼的问题:很多不错的桌面小设备,比如电源、示波器、逻辑分析仪,它们的官…...

XZ1018,100V,40A,NMOS 封装:TO252
封装:TO252类型:NVDS:100V VGS: 20V ID:40ARDS(ON):10V <14mΩRDS(ON):4.5V <19mΩ型号: XZ1018 封装:TO252类型…...

理想二极管控制器:用MOSFET实现毫伏级压降的电源管理方案
1. 理想二极管控制器:告别传统二极管的压降损耗 在电源设计、电池保护、太阳能板并联这些领域里,二极管是个再常见不过的元件。我们用它来防反接、做整流、实现“或”逻辑供电,几乎不假思索。但如果你设计过一个需要处理大电流、低电压的系统…...