SLAM从入门到精通(3d 点云数据访问)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】
3d 点云设备现在汽车上用的很多。之前3d lidar这种高端传感器,只能被少部分智能汽车使用。后来很多国产厂家也开始研发3d lidar之后,它的价格快速下跌下来,部分3d lidar的价格已经降到了几千元左右,实用性一下子就提升上来了。不管用它来做slam,还是用来检测物体、识别物体、避障检测,都是很方便的。所以,对于slam的同学来说,除了轮速编码器、imu、camera、单线lidar这些传统传感器之外,对多线lidar、深度摄像机一定要多加关注,它们肯定是未来发展的方向。
和图像主要采用opencv库一样,目前3d lidar数据主要采用的库是pcl。
1、编写pc_node.cpp
#include <ros/ros.h>
#include <sensor_msgs/PointCloud2.h>
#include <pcl_ros/point_cloud.h>void PointcloudCB(const sensor_msgs::PointCloud2ConstPtr &msg)
{pcl::PointCloud<pcl::PointXYZ> pointCloudIn;pcl::fromROSMsg(*msg, pointCloudIn);int cloudSize = pointCloudIn.points.size();for(int i = 0; i < cloudSize; i++){ROS_INFO("[i=%d] (%.2f, %.2f, %.2f)",i,pointCloudIn.points[i].x,pointCloudIn.points[i].y,pointCloudIn.points[i].z);}
}int main(int argc, char* argv[])
{ros::init(argc, argv, "pc_node");ROS_WARN("pc_node start");ros::NodeHandle nh;ros::Subscriber pc_sub = nh.subscribe("/kinect2/sd/points", 1, PointcloudCB);ros::spin();return 0;
}
代码不复杂。首先我们创建一个pc_sub订阅器,它订阅了话题/kinect2/sd/points,并且为这个话题准备了回调函数PointcloudCB。在这个回调函数里面,代码对收到的点云数据进行了打印,分别显示它们的x/y/z浮点数值。一般来说,点云还会有一个反光强度的值,但这里没有提及。
多线激光雷达和单线激光雷达很相似,只不过多了一个z方向的数值。也正是因为这个z数值,让我们知道了周围环境的深度信息,这也是它最有价值的地方。
2、准备CMakeLists.txt
因为pc_node.cpp依赖于pcl库,所以这里有两件事情要解决。第一件事情,查找一下当前的依赖库里面有没有pcl,
## Find catkin and any catkin packages
find_package(catkin REQUIRED COMPONENTS message_generation roscpp rospy std_msgs genmsg tf cv_bridge pcl_ros)
find_package(PCL REQUIRED)第二件事情,就是添加编译规则,告诉CMakeLists.txt,pc_node.cpp应该怎么编译,
add_executable(pc_node src/pc_node.cpp)
target_link_libraries(pc_node ${catkin_LIBRARIES})
add_dependencies(pc_node beginner_tutorials_generate_messages_cpp)3、catkin_make编译
pc_node.cpp和CMakeLists.txt都准备好了,那么就可以开始编译了。编译的方法,就是在catkin_ws目录下面直接输入catkin_make即可。
4、测试和验证
测试的方法其实和camera是一样的。第一步,需要一个仿真环境,输入roslaunch wpr_simulation wpb_pointcloud.launch即可。
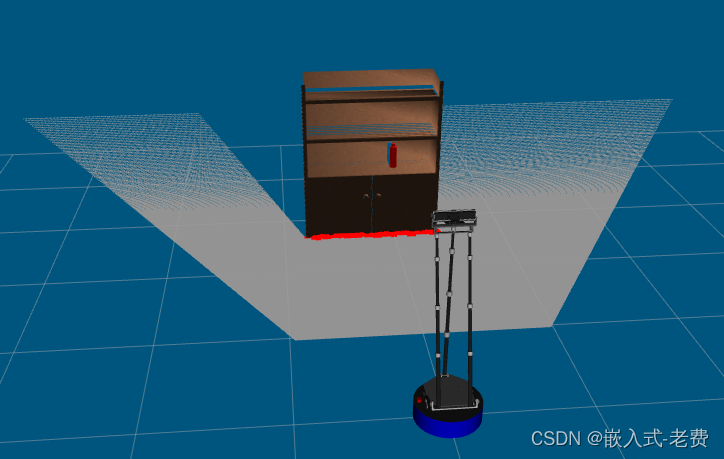
仿真环境准备好之后,第二步就可以输入rosrun beginner_tutorials pc_node,这个时候会看到很多的数据打印。这些数据就是看到的3d数据。
[ INFO] [1696920724.029184374, 77.884000000]: [i=16505] (-0.82, -1.09, 2.22)
[ INFO] [1696920724.029235237, 77.884000000]: [i=16506] (-0.81, -1.09, 2.22)
[ INFO] [1696920724.029306573, 77.884000000]: [i=16507] (-0.81, -1.09, 2.22)
[ INFO] [1696920724.029391593, 77.884000000]: [i=16508] (-0.80, -1.09, 2.22)
[ INFO] [1696920724.029448090, 77.884000000]: [i=16509] (-0.79, -1.09, 2.22)
[ INFO] [1696920724.029506356, 77.884000000]: [i=16510] (-0.79, -1.10, 2.24)
[ INFO] [1696920724.029556718, 77.884000000]: [i=16511] (-0.79, -1.11, 2.25)
[ INFO] [1696920724.029606507, 77.884000000]: [i=16512] (-0.79, -1.12, 2.27)
[ INFO] [1696920724.029656374, 77.884000000]: [i=16513] (-0.79, -1.12, 2.29)
[ INFO] [1696920724.029706286, 77.884000000]: [i=16514] (-0.79, -1.13, 2.31)
[ INFO] [1696920724.029756426, 77.884000000]: [i=16515] (-0.79, -1.14, 2.33)
[ INFO] [1696920724.029805764, 77.884000000]: [i=16516] (-0.79, -1.15, 2.35)
[ INFO] [1696920724.029855296, 77.884000000]: [i=16517] (-0.79, -1.16, 2.37)
[ INFO] [1696920724.029904895, 77.884000000]: [i=16518] (-0.79, -1.17, 2.38)
[ INFO] [1696920724.029954521, 77.884000000]: [i=16519] (-0.79, -1.18, 2.40)
[ INFO] [1696920724.030003954, 77.884000000]: [i=16520] (-0.79, -1.19, 2.42)
[ INFO] [1696920724.030053707, 77.884000000]: [i=16521] (-0.79, -1.20, 2.45)
[ INFO] [1696920724.030103470, 77.884000000]: [i=16522] (-0.79, -1.21, 2.47)
[ INFO] [1696920724.030152928, 77.884000000]: [i=16523] (-0.79, -1.22, 2.49)
[ INFO] [1696920724.030202438, 77.884000000]: [i=16524] (-0.79, -1.23, 2.51)
[ INFO] [1696920724.030251816, 77.884000000]: [i=16525] (-0.79, -1.24, 2.53)
5、后续的工作
拿到点云数据只是第一步,后续可以通过x/y/z限制、滤波、分割、识别、统计等方法,估算出物体的具体位置。拿到这些位置信息之后,就可以进一步通知机器人去进行后续任务的处理,这个是之前传感器无法实现的效果。
当然现在用3d lidar做slam的开源代码也很多,特别是室外,靠gmapping根本是不可能的。只能靠3d lidar、gps、imu这些传感器去处理,也是未来发展一个很重要的方向。
相关文章:
SLAM从入门到精通(3d 点云数据访问)
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing 163.com】 3d 点云设备现在汽车上用的很多。之前3d lidar这种高端传感器,只能被少部分智能汽车使用。后来很多国产厂家也开始研发3d lidar之后&am…...

如何在 Spring Boot 中提高应用程序的安全性
如何在 Spring Boot 中提高应用程序的安全性 Spring Boot是一种流行的Java开发框架,用于构建Web应用程序和微服务。在构建应用程序时,安全性是至关重要的因素。不论您的应用程序是面向公众用户还是企业内部使用,都需要采取适当的措施来确保数…...
【Vuex+ElementUI】
一、导言 1、引言 Vuex是一个用于Vue.js应用程序的状态管理模式和库。它建立在Vue.js的响应式系统之上,提供了一种集中管理应用程序状态的方式。使用Vuex,您可以将应用程序的状态存储在一个单一的位置(即“存储”)中,…...
多媒体播放软件 Infuse mac中文特点介绍
Infuse mac是一款多媒体播放器应用,它支持播放多种格式的视频文件、音频文件和图片文件,并且可以通过AIrPlay将媒体内容投放到其他设备上。Infuse还支持在线视频流媒体播放和本地网络共享,用户可以通过它来访问家庭网络上的媒体文件。 Infuse…...
华为数通方向HCIP-DataCom H12-831题库(单选题:201-220)
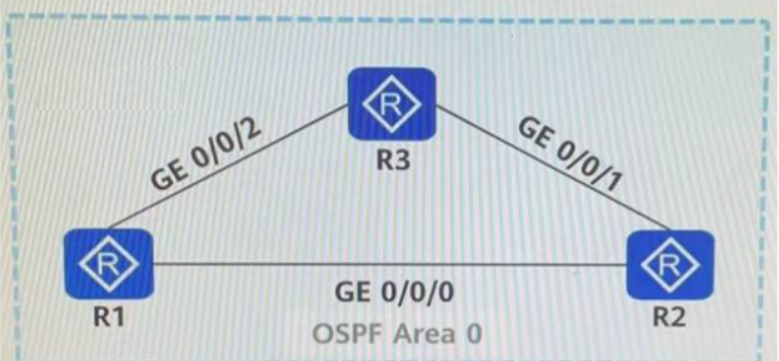
第201题 如图所示,路由器所有的接口开启OSPF,链路的Cost值如图中标识。若在R2的OSPF进程中通过命令import-route direct type 1引入直连路由,则R1到达10.0.2.2 /32的Cost值是以下哪一选项? A、150 B、151 C、200 D、201 答案:C 解析: Loopback0的cost值默认为0,R1-R2的…...

【管理运筹学】第 9 章 | 网络计划(2,时间参数的计算 —— 工作时间的确定与事项的时间参数)
文章目录 引言一、工作时间的确定二、事项的时间参数2.1 事项的最早开始时间2.2 事项的最迟结束时间2.3 事项的时差2.4 利用事项的时间参数来确定关键线路 引言 计算网络图中有关的时间参数,主要目的是找到关键线路,为网络计划的优化、调增和执行提供明…...
英语——方法篇——单词——羊肉串记忆法——单词密码
在记忆英语单词的时候,我们习惯于一个字母一个字母地记忆,很少会以词或字母组合为单位来记忆。在这里我们要打开视野,学习以词或字母组合为单位,一组一组地记忆英语单词。英语单词数目庞大,但是构成单词的字母只有26个…...

【m98】视频帧的 jitterbuffer 1:
VCMJitterBuffer D:\XTRANS\m98_rtc\rtc-webrtc\src\modules\video_coding\jitter_buffer.h使用2个map和一个list管理VCMFrameBuffer 指针对象:UnorderedFrameList free_frames_ RTC_GUARDED_BY(mutex_);FrameList decodable_frames_ RTC_GUARDED_BY(mutex_);FrameList incomp…...

javascript中map和filter的区别与联系
javascript中map和filter的区别与联系如何获取对象数组中某个值 javascript中map和filter的区别与联系 在 JavaScript 中,map 和 filter 是两个常用的数组方法,用于对数组进行转换和过滤操作。它们的区别和联系如下: 功能不同: m…...
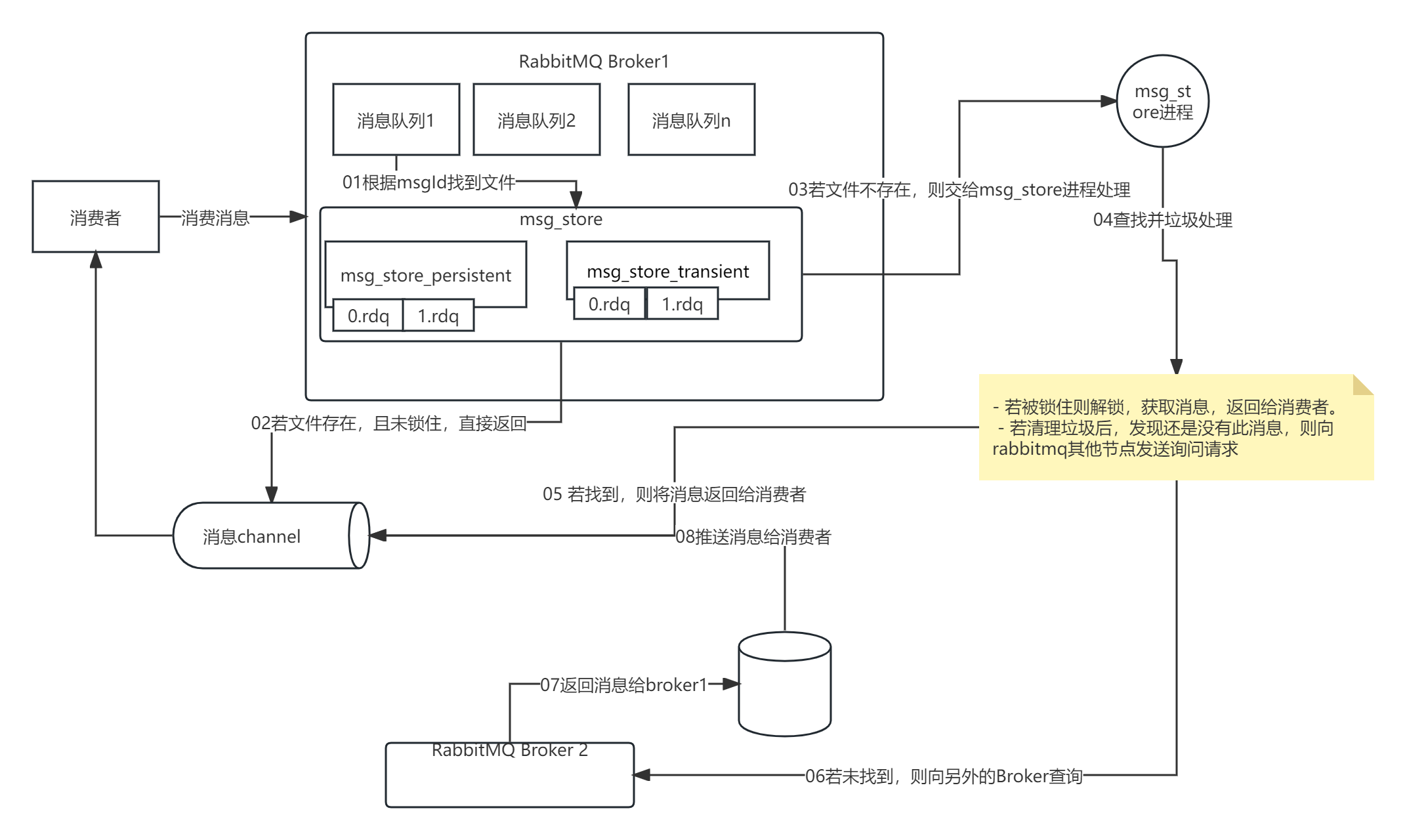
【RabbitMQ 实战】10 消息持久化和存储原理
一、持久化 1.1 持久化对象 rabbitmq的持久化分为三个部分: 交换器的持久化。队列的持久化。消息的持久化。 1.1.1 交换器持久化 交换器的持久化是通过在声明交换器时, 指定Durability参数为durable实现的。若交换器不设置持久化,在rabb…...
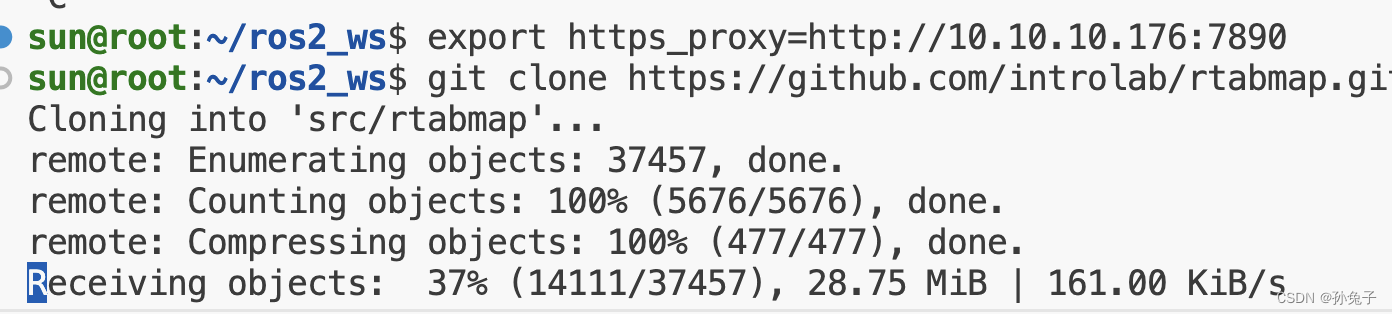
vscode 连接ubuntu git下载缓慢
在ubuntu20.04下载: git clone https://github.com/introlab/rtabmap.git src/rtabmap 挂掉情况 export https_proxyhttp://10.10.10.176:7890export http_proxyhttp://10.10.10.176:7890 其中 10.10.10.176是我本机的ip地址,7890是我的代理后几位 如…...

2731. 移动机器人
2731. 移动机器人有一些机器人分布在一条无限长的数轴上,他们初始坐标用一个下标从 0 开始的整数数组 nums 表示。当你给机器人下达命令时,它们以每秒钟一单位的速度开始移动。 给你一个字符串 s ,每个字符按顺序分别表示每个机器人移动的方…...

小程序实现人脸识别功能
调用api wx.startFacialRecognitionVerify 第一步: // 修改方法expertUpdate() {wx.startFacialRecognitionVerify({name: _this.registerForm.realName, //身份证名称idCardNumber: _this.registerForm.idCard, //身份证号码checkAliveType: 1, //屏幕闪烁(人脸核验的交互…...

【】javax.crypto.IllegalBlockSizeException: Input length not multiple of 8 bytes
问题描述 jdk版本:8 用DES进行加解密,其中转换模式为“DES/CBC/NoPadding”,要加密的明文为 “密码学浅析”,执行加密操作,报如下错误 Exception in thread "main" javax.crypto.IllegalBlockSizeExcepti…...

312.戳气球
将戳气球转换到添加气球,记忆搜索slove(i,j):在开区间(i,j)全部填满气球得到的最多硬币数,两端val[i]、val[j] class Solution { public:vector<vector<int>> ans;vector<int> val;int slove(int left,int right){if(left&…...

get_trade_detail_data函数使用
查阅股票持仓情况 positions get_trade_detail_data(‘8000000213’, ‘stock’, ‘position’) for dt in positions: print(f’股票代码: {dt.m_strInstrumentID}, 市场类型: {dt.m_strExchangeID}, 证券名称: {dt.m_strInstrumentName}, 持仓量: {dt.m_nVolume}, 可用数量:…...
【融合ChatGPT等AI模型】Python-GEE遥感云大数据分析、管理与可视化及多领域案例实践应用
目录 第一章 理论基础 第二章 开发环境搭建 第三章 遥感大数据处理基础与ChatGPT等AI模型交互 第四章 典型案例操作实践 第五章 输入输出及数据资产高效管理 第六章 云端数据论文出版级可视化 更多应用 随着航空、航天、近地空间等多个遥感平台的不断发展,近…...
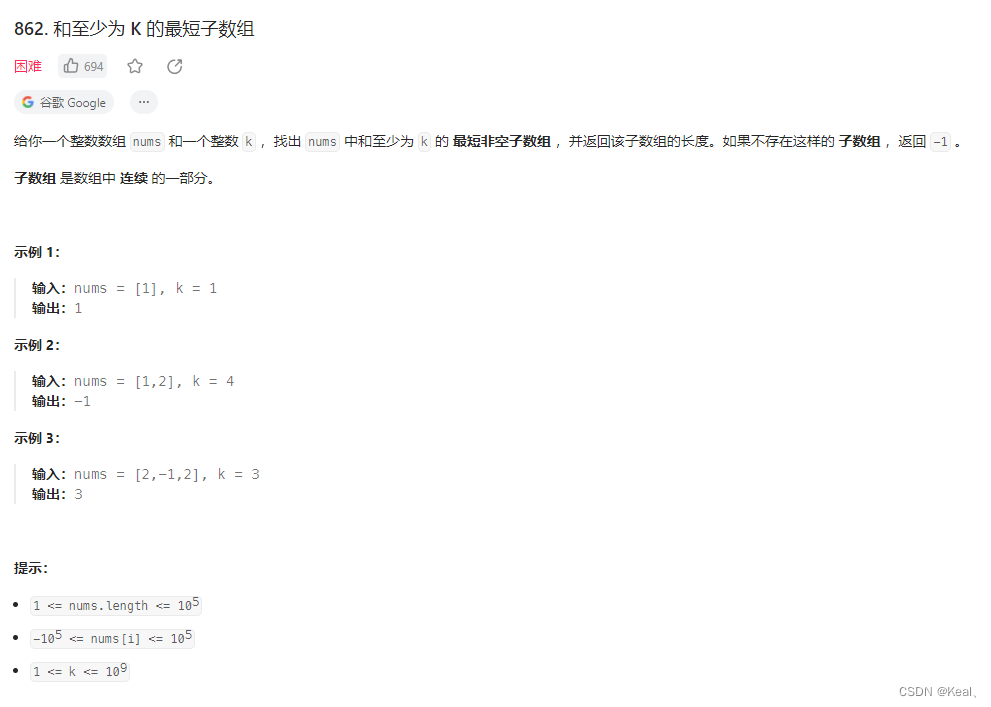
LeetCode862 和至少为k的最短子数组
题目: 解析: 1、先构造前缀和数组 2、单调队列存放滑动窗口,目的求Sj-Si >k的情况下,窗口最小。 代码: class Solution {public int shortestSubarray(int[] nums, int k) {int n nums.length;long[] sums new …...

网卡bonding模式 - bond模式配置介绍
网卡bonding简介 网卡绑定就是把多张物理网卡通过软件虚拟成一个虚拟的网卡,配置完毕后,所有的物理网卡的ip和mac将会变成相同的。多网卡同时工作可以提高网络速度,还可以实现网卡的负载均衡、冗余。 bonding模式 1 round-robin(mode0) 轮转…...

做了个 chrome 插件实现 B 站视频截图功能,直接从当前视频帧无损复制
起因是看 B 站视频想截个图很麻烦,右下角暂停按钮无法去除,于是写了一行代码把暂停按钮隐藏。 后经提醒,发现可以通过 canvas 获取视频帧来截取图片,于是写了如下代码完美获取视频帧。 var v document.querySelector(".bpx…...

四旋翼变形控制:RL与MPC在混合动力学中的对比
1. 四旋翼变形控制的技术挑战与解决方案四旋翼变形控制(Quadrotor Morpho-Transition)是当前机器人领域最具挑战性的前沿技术之一。这项技术使机器人能够在空中完成形态变换,实现从飞行模式到地面模式的平滑切换。想象一下,一架四…...

别再手动改路径了!用LabVIEW + MATLAB Script做自动化测试,这份环境配置指南让你效率翻倍
LabVIEW与MATLAB深度整合:构建自动化测试系统的工程实践指南在工业自动化与测试测量领域,LabVIEW和MATLAB的组合堪称黄金搭档。LabVIEW擅长硬件接口和实时控制,而MATLAB在算法开发和数据分析方面具有无可比拟的优势。本文将深入探讨如何将两者…...

别再盲跑了!手把手教你用Arduino Zero在IDE 2.0里设置断点单步调试
告别盲跑时代:Arduino Zero与IDE 2.0的源码级调试实战指南 当你的Arduino项目逻辑越来越复杂,仅靠串口打印调试就像在迷宫里摸黑前行——直到遇见Arduino Zero与IDE 2.0的调试组合。本文将揭示如何用这套工具实现 源码级精准调试 ,即使你手…...

Owl-Alpha 新手快速上手指南
在处理大规模数据或构建高性能应用时,我们常常会遇到一个棘手的问题:如何在不阻塞主线程的情况下,高效地执行耗时任务?无论是处理图像、解析大型文件,还是进行复杂的数学运算,传统的单线程模式往往会让界面…...

Web渗透测试能力成长地图:从工具使用到漏洞认知跃迁
1. 这不是工具清单,而是一张Web渗透测试的“能力成长地图”你刚点开这篇文章,大概率正站在两个路口之间:一边是网上铺天盖地的“十大免费扫描器推荐”,点进去全是截图下载链接一句“一键扫漏洞”,结果装完跑两下&#…...

基于MAX78000的离线鸟类声音识别:边缘AI从数据到部署全流程解析
1. 项目概述:当边缘AI“听懂”鸟鸣在野外生态监测或自家后院观鸟时,你是否有过这样的经历:听到一阵清脆或婉转的鸟鸣,却完全不知道是哪位“歌唱家”在表演?传统的鸟类识别依赖专家经验和图鉴比对,不仅门槛高…...

Taotoken的审计日志功能为企业API安全与合规管理提供支持
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken的审计日志功能为企业API安全与合规管理提供支持 当企业决定将大模型能力集成到内部业务流程中时,IT管理员和安…...

Unity项目DrawCall降不下来?试试用Mesh Baker合并贴图集,保姆级图文教程
Unity性能优化实战:用Mesh Baker合并贴图集降低DrawCall全流程解析当你的Unity项目帧率开始卡顿,Profiler里DrawCall数字居高不下时,合并贴图集往往是解决问题的关键一步。本文将以一个实际项目为例,带你从零开始使用Mesh Baker的…...

应对Claude Code访问不稳定,快速切换至Taotoken的应急方案
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 应对Claude Code访问不稳定,快速切换至Taotoken的应急方案 对于依赖Claude Code进行日常开发或自动化任务的用户来说&a…...

利用FTDI芯片MPSSE模式构建Arduino兼容开发环境
1. 项目概述:当FTDI芯片遇上Arduino生态如果你手头有一些闲置的FTDI USB转串口模块,比如常见的FT232R、FT2232H,或者像我一样,从某个旧设备上拆下来一块FT2232C的老古董,除了用来给单片机烧录程序或者做串口调试&#…...