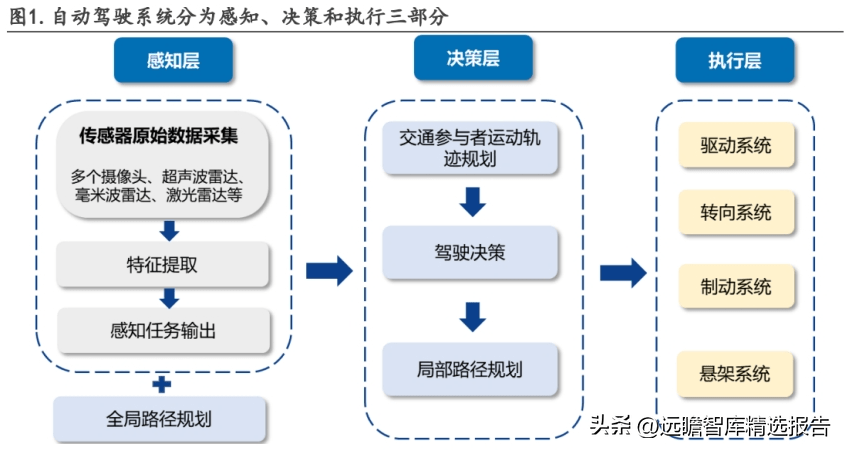
自动驾驶软件和人工智能
自动驾驶汽车的核心在于其软件系统,而其中的机器学习和深度学习技术是使车辆能够感知、理解、决策和行动的关键。本文将深入探讨这些技术在自动驾驶中的应用,包括感知、定位、路径规划以及道路标志和交通信号的识别。
1. 机器学习和深度学习在自动驾驶中的应用
机器学习和深度学习在自动驾驶中的应用是实现自动驾驶的关键之一。它们为车辆提供了感知、决策和控制等关键功能。以下是机器学习和深度学习在自动驾驶中的详细应用:

1.1 感知
1.1.1 目标检测
机器学习和深度学习模型可以用于检测和识别道路上的各种目标,包括其他车辆、行人、自行车和障碍物。卷积神经网络(CNN)是常用于目标检测的深度学习模型,它可以从摄像头、激光雷达等传感器收集的数据中提取特征,并标识出这些目标的位置和类别。
1.1.2 物体跟踪
一旦检测到目标,机器学习模型可以通过跟踪算法来持续追踪它们的位置和运动。这对于预测其他车辆的行为以及避免与它们发生碰撞至关重要。
1.1.3 车道检测
深度学习模型可以用于车道检测,帮助车辆保持在正确的车道内行驶。这有助于自动驾驶汽车在高速公路上保持安全的行车轨迹。
1.1.4 障碍物避免
机器学习和深度学习模型可以用于预测和避免与障碍物的碰撞。这些模型可以根据传感器数据生成避障路径,并向车辆发送相应的控制命令,以确保安全行驶。
1.2 决策和控制
1.2.1 自动驾驶决策
机器学习和深度学习模型可用于自动驾驶决策,包括超车、变道、换道和停车等。通过训练模型,车辆可以在各种交通场景中做出合适的驾驶决策。
1.2.2 模型预测控制(MPC)
模型预测控制是一种常用于自动驾驶的控制方法。它使用机器学习模型来预测车辆在未来的一段时间内的行为,并根据这些预测来生成最佳控制输入,以实现路径规划和避障。
1.3 高精度定位
1.3.1 数据融合
自动驾驶汽车通常使用多种传感器来获得高精度的定位信息。机器学习和深度学习模型可以用于将来自不同传感器的数据进行融合,以提供更准确的定位和地图匹配。
1.3.2 车辆自我定位
机器学习模型可以用于车辆自我定位,即通过分析传感器数据来确定车辆在地图上的位置。这对于在GPS信号不稳定或遮挡的情况下实现准确的定位至关重要。
1.4 道路标志和交通信号的识别
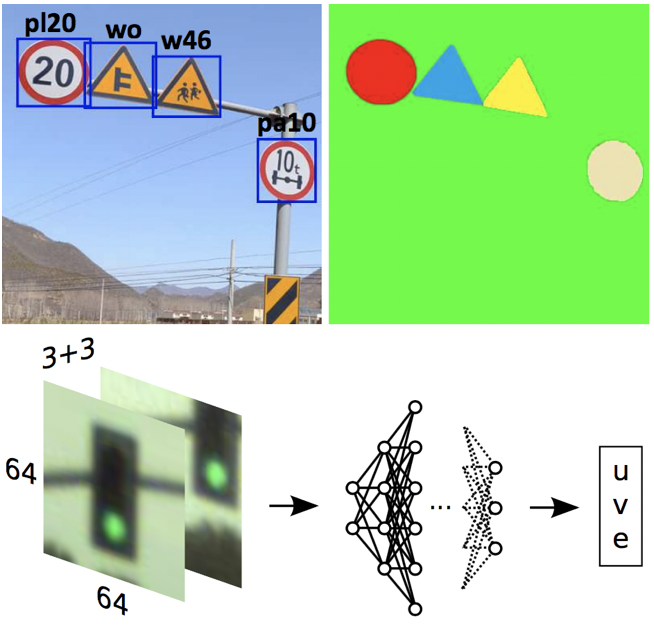
1.4.1 道路标志识别
深度学习模型可以用于检测和识别道路标志,如限速标志、停车标志和禁止标志。这有助于车辆遵守交通规则。
1.4.2 交通信号识别
机器学习和深度学习模型可以用于实时识别交通信号,包括红绿灯和行人横道。这些信息对于车辆的决策和控制至关重要。
总之,机器学习和深度学习在自动驾驶中的应用涵盖了感知、定位、路径规划、决策和控制等多个关键领域。这些技术使自动驾驶汽车能够在复杂的交通环境中安全、高效地行驶,为实现自动驾驶的梦想迈出了关键的一步。随着技术的不断进步和数据的积累,自动驾驶系统的性能将不断提高,为未来的出行方式带来革命性的变化。
2. 自动驾驶的算法和模型
自动驾驶的算法和模型是车辆实现感知、决策和控制的关键组成部分。这些算法和模型负责处理传感器数据、规划路径、做出决策,并控制车辆行动。
2.1 感知算法
感知是自动驾驶系统的第一步,它涉及到从传感器中获取和理解环境信息。以下是感知算法的一些关键方面:
2.1.1 目标检测
目标检测算法用于识别和定位道路上的各种目标,如车辆、行人和障碍物。常见的目标检测算法包括:
-
卷积神经网络 (CNN): CNN是深度学习中常用于目标检测的模型,它可以学习和提取图像中的特征,用于识别不同类型的目标。
-
YOLO (You Only Look Once): YOLO是一种实时目标检测算法,它能够在单次前向传播中同时识别多个目标。
-
SSD (Single Shot MultiBox Detector): SSD是另一种实时目标检测算法,具有高度的准确性和效率。
2.1.2 语义分割
语义分割算法将图像分为不同的区域,并为每个像素分配一个语义类别,如道路、建筑物、行人等。这有助于车辆更好地理解道路环境。
- 卷积神经网络 (CNN): CNN也可用于语义分割任务,通过像素级别的分类来生成语义分割地图。
2.1.3 障碍物跟踪
一旦检测到目标,障碍物跟踪算法可用于追踪目标的位置和运动。这有助于车辆更好地预测其他车辆和行人的行为。
- 卡尔曼滤波器: 卡尔曼滤波器是常用于目标跟踪的传统算法,它可以根据过去的观测值来估计目标的当前状态。
2.2 决策和规划算法
决策和规划算法用于确定车辆应该如何行驶,以满足安全、效率和驾驶舒适度等要求。以下是一些关键的决策和规划算法:
2.2.1 路径规划
路径规划算法负责选择车辆的行驶路径,以确保安全和高效的行驶。这些算法需要考虑到道路状况、交通流量、速度限制和其他车辆的位置。
-
A*算法: A*算法是一种常用的路径规划算法,它可以在图形中找到最短路径。
-
模型预测控制 (MPC): MPC算法结合了路径规划和控制,它可以考虑车辆的动力学特性和目标,生成最优的行驶轨迹。
2.2.2 决策制定
决策制定算法负责根据感知数据和高级规则制定行动计划,并将其转化为车辆的具体控制命令。这些算法需要考虑到安全性、效率和驾驶舒适度。
-
有限状态机 (FSM): FSM是一种常用于决策制定的模型,它根据不同的驾驶情景来选择合适的行动。
-
强化学习: 强化学习算法可以用于训练车辆在不同驾驶场景下做出决策,如超车、变道和停车。
2.3 控制算法
控制算法负责将决策转化为具体的车辆控制命令,包括加速、制动、转向和换挡。以下是一些常见的控制算法:
-
PID控制器: PID(比例-积分-微分)控制器是一种经典的反馈控制算法,用于稳定车辆的行驶和控制。
-
模型预测控制 (MPC): MPC不仅用于路径规划,还可以用于车辆的实时控制,以跟踪生成的轨迹。
-
车辆动力学模型: 控制算法需要考虑车辆的动力学特性,以确保安全的加速、制动和转向。
自动驾驶的算法和模型构成了自动驾驶系统的核心,它们使车辆能够感知、理解、决策和行动。这些算法和模型的不断改进和优化将进一步提高自动驾驶汽车的性能和安全性,为未来的交通系统带来更大的变革。
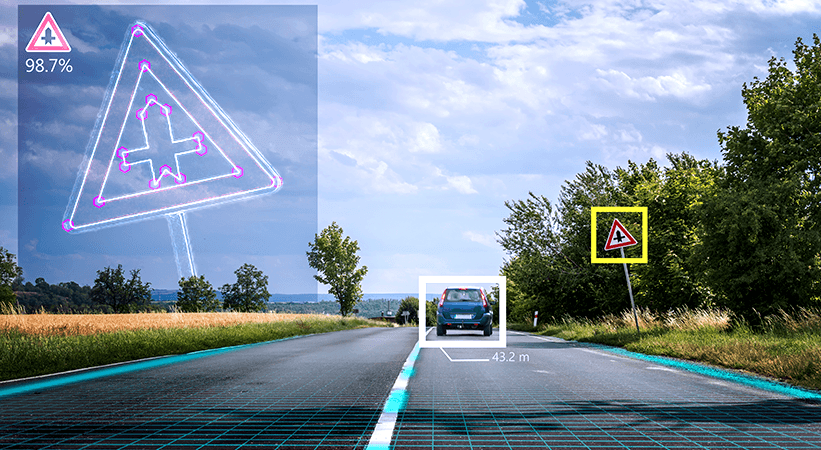
3. 道路标志和交通信号的识别
在自动驾驶中,道路标志和交通信号的识别是关键任务之一。这些标志和信号提供了有关道路规则和条件的重要信息,帮助自动驾驶系统做出正确的决策和行动。
3.1 道路标志识别
3.1.1 目标
道路标志识别的目标是检测和识别道路上的各种标志,包括限速标志、停车标志、禁止标志、指示标志(如转弯标志)等。识别这些标志有助于车辆遵守交通规则和规划行为。
3.1.2 数据来源
道路标志的识别通常依赖于视觉传感器,如车载摄像头。摄像头捕获道路标志的图像,然后使用计算机视觉技术对这些图像进行分析和处理。
3.1.3 算法和模型
道路标志识别通常使用深度学习模型,如卷积神经网络(CNN)。以下是道路标志识别的基本步骤:
-
图像采集: 车辆的摄像头捕获道路标志的图像。
-
图像预处理: 对图像进行预处理,包括调整大小、去噪声和增强对比度。
-
特征提取: 使用深度学习模型提取图像中的特征,这些特征有助于标志的分类。
-
分类: 将提取的特征输入到分类器中,以确定标志的类型,例如限速标志、停车标志等。
-
识别结果: 最终,识别结果将告诉车辆系统检测到的标志类型以及相应的规则。
3.1.4 应用
道路标志识别的应用包括:
-
速度限制: 识别限速标志并根据速度限制规则自动调整车辆的速度。
-
停车和禁止标志: 检测停车标志和禁止标志,以确定停车位置和禁止行驶的区域。
-
导航和路线规划: 根据识别的标志提供导航和路线规划建议,帮助车辆按规定行驶。
3.2 交通信号识别
3.2.1 目标
交通信号识别的目标是检测和识别道路上的交通信号,包括红绿灯、行人横道信号等。交通信号识别有助于车辆遵守交通规则,特别是在交叉口和人行横道等地方。
3.2.2 数据来源
交通信号的识别同样依赖于车辆上的视觉传感器,通常是摄像头。这些摄像头捕获交通信号的图像,并将其提供给计算机视觉系统进行处理。
3.2.3 算法和模型
交通信号识别通常使用深度学习模型,也可以包括以下步骤:
-
图像采集: 摄像头捕获交通信号的图像,包括红绿灯的状态。
-
图像预处理: 对图像进行预处理,以便更好地识别信号。
-
特征提取: 使用深度学习模型提取图像中的特征,以确定信号的状态(红灯、绿灯或黄灯)。
-
分类: 将提取的特征输入到分类器中,以确定信号的状态。
-
识别结果: 最终的识别结果告诉车辆系统当前交通信号的状态,以便采取适当的行动。
3.2.4 应用
交通信号识别的应用包括:
-
红绿灯控制: 根据识别的红绿灯状态来控制车辆的停车和行驶。
-
人行横道信号: 识别行人横道信号,以便采取适当的行动,如减速或停车。
-
交叉口安全: 在交叉口识别交通信号有助于车辆在复杂的交通场景中安全驾驶。
道路标志和交通信号的识别对于自动驾驶汽车的安全和合规非常重要。深度学习和计算机视觉技术使车辆能够实时识别这些标志和信号,帮助车辆在复杂的交通环境中行驶。这些技术的不断改进将提高自动驾驶汽车的性能和安全性。
4 结论
机器学习和深度学习技术是自动驾驶汽车的核心,它们使车辆能够感知、理解、决策和行动。这些技术在感知、定位、路径规划以及道路标志和交通信号的识别等方面都发挥着关键作用。随着技术的不断进步,自动驾驶汽车将变得更加智能、安全和可靠,为未来的交通系统带来了革命性的变化。然而,确保系统的安全性和可靠性仍然是一个持续的挑战和重要任务。
相关文章:
自动驾驶软件和人工智能
自动驾驶汽车的核心在于其软件系统,而其中的机器学习和深度学习技术是使车辆能够感知、理解、决策和行动的关键。本文将深入探讨这些技术在自动驾驶中的应用,包括感知、定位、路径规划以及道路标志和交通信号的识别。 1. 机器学习和深度学习在自动驾驶中…...
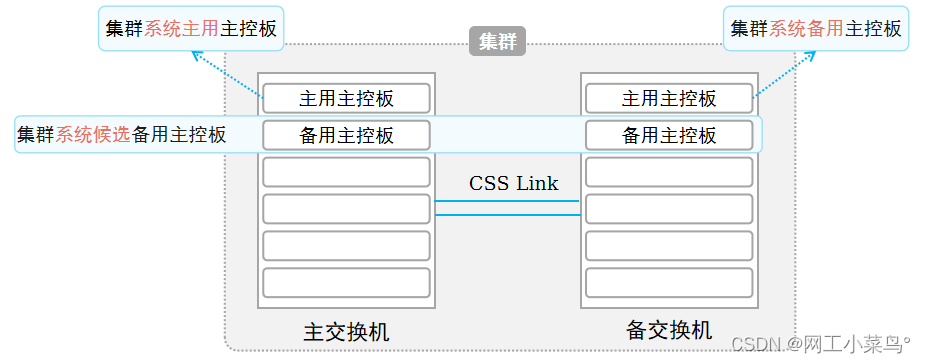
堆叠、集群技术
1.堆叠、集群技术的概述 堆叠、集群简介 堆叠(iStack),将多台支持堆叠特性的交换机通过堆叠线缆连接在一起,从逻辑上虚拟成一台交换设备,作为一个整体参与数据转发。 集群(Cluster Switch System…...
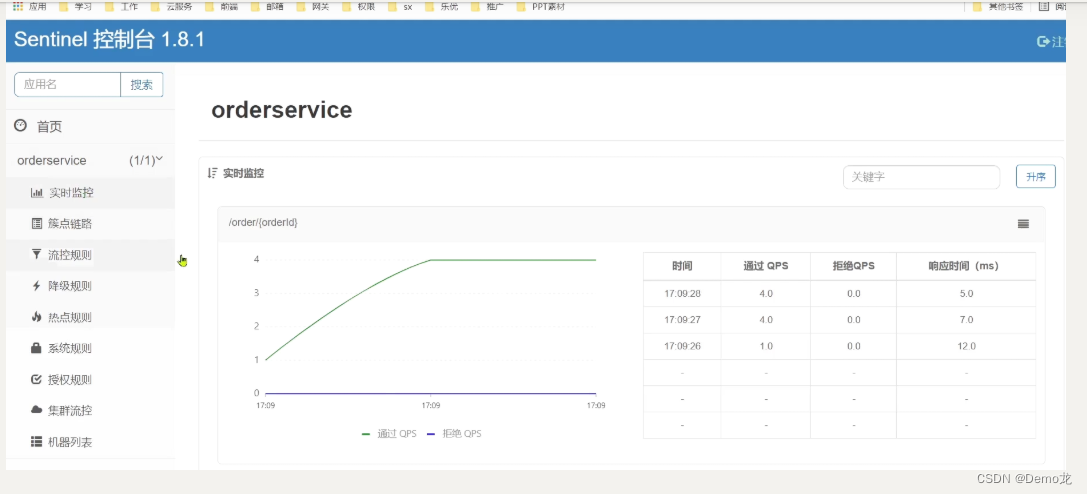
SpringCould微服务保护01——Sentinel组件下载并使用
1.初识Sentinel 1.1.雪崩问题及解决方案 1.1.1.雪崩问题 微服务中,服务间调用关系错综复杂,一个微服务往往依赖于多个其它微服务。 如图,如果服务提供者I发生了故障,当前的应用的部分业务因为依赖于服务I,因此也会被…...

可扩展性对物联网管理系统有哪些影响?
可扩展性对于物联网管理系统的设计和开发非常重要,它直接影响着系统的性能、可靠性和能耗等方面,是评估一个系统优劣的重要因素之一。可扩展性对物联网管理系统的影响主要体现在以下几个方面: 设备兼容性:物联网管理系统的可扩展性…...

洗地机哪个品牌最耐用质量好?2023年最好用的洗地机
随着科技的发展,人们的生活越来越便利,就拿打扫卫生来说,现在越来越多人抛弃扫把、地拖,转而选择让清洁更加轻松的清洁家电,而洗地机就是这样一种让打扫卫生变得简单轻松的家电。近年来洗地机销量剧增,是目…...
计算机视觉(Computer Vision, CV)是什么?
什么是计算机视觉 近年来,计算机视觉 (Computer Vision,简称CV) 不断普及,已成为人工智能 (AI) 增长最快的领域之一。计算机视觉致力于使计算机能够识别和理解图像和视频中的物体和人。 计算机视觉应用程序使用来自传感设备、人工智能、机器…...
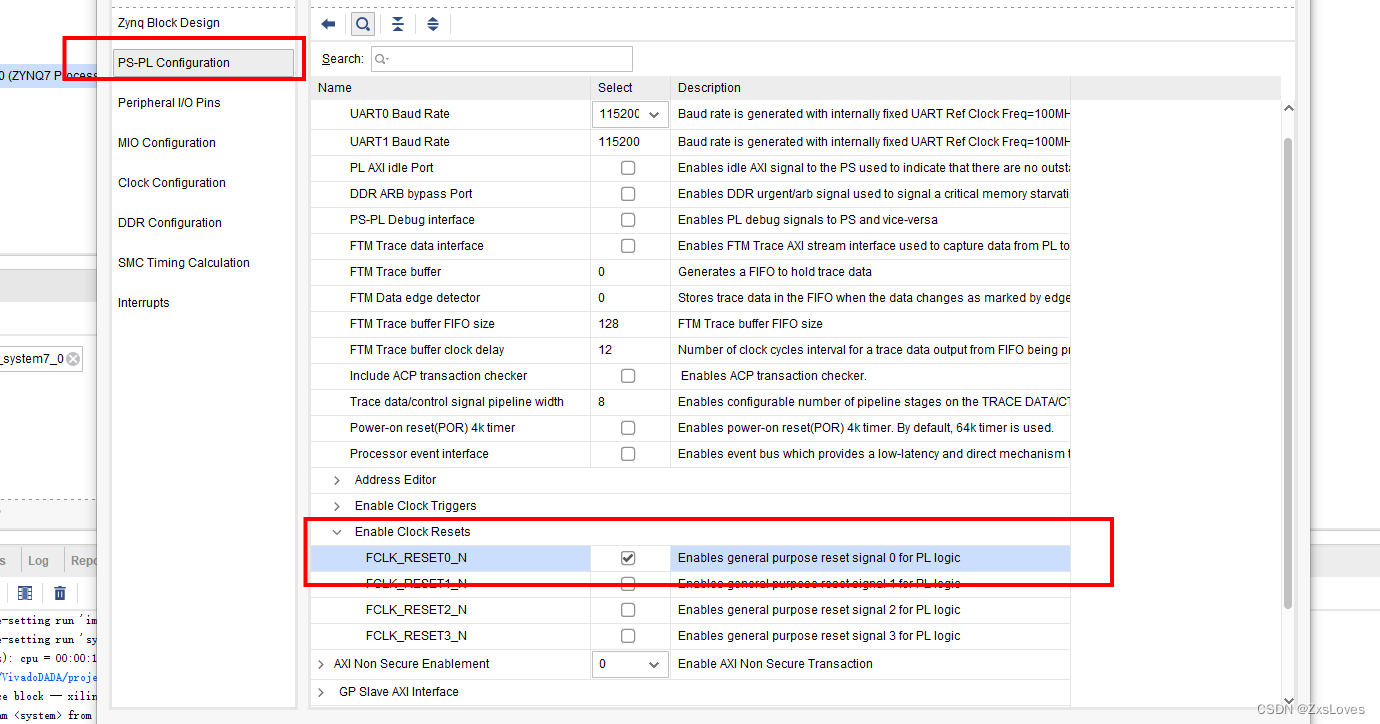
【【萌新的SOC学习之自定义IP核 AXI4接口】】
萌新的SOC学习之自定义IP核 AXI4接口 自定义IP核-AXI4接口 AXI接口时序 对于一个读数据信号 AXI突发读 不要忘记 最后还有拉高RLAST 表示信号的中止 实验任务 : 通过自定义一个AXI4接口的IP核 ,通过AXI_HP接口对PS端 DDR3 进行读写测试 。 S_AXI…...

设计模式-创建型模式
文章目录 一、单例模式1.饿汉式(1) 静态变量(2) 静态代码块(3) 枚举方式 2.懒汉式(1) 双检锁(2) 静态内部类 3.破坏单例模式(1) 序列化(2) 反射 4.解决单例模式被破坏(1) 序列化、反序列化破坏单例模式的解决方法(2) 反射破坏单例解决 二、工厂方法模式1.简单工厂模式2.工厂方法…...

golang中的RSA算法,加密解密,签名校验,导出公钥密钥,导入公钥密钥
RSA算法广泛应用与数据加密(比如 SSL 传输层加密),数字签名(比如支付宝的支付签名)。 1、加密解密 // encrypts the given message with RSA-OAEP func f1() {// random 用来生成随机的素数rsaPriviteKey, err : rsa…...
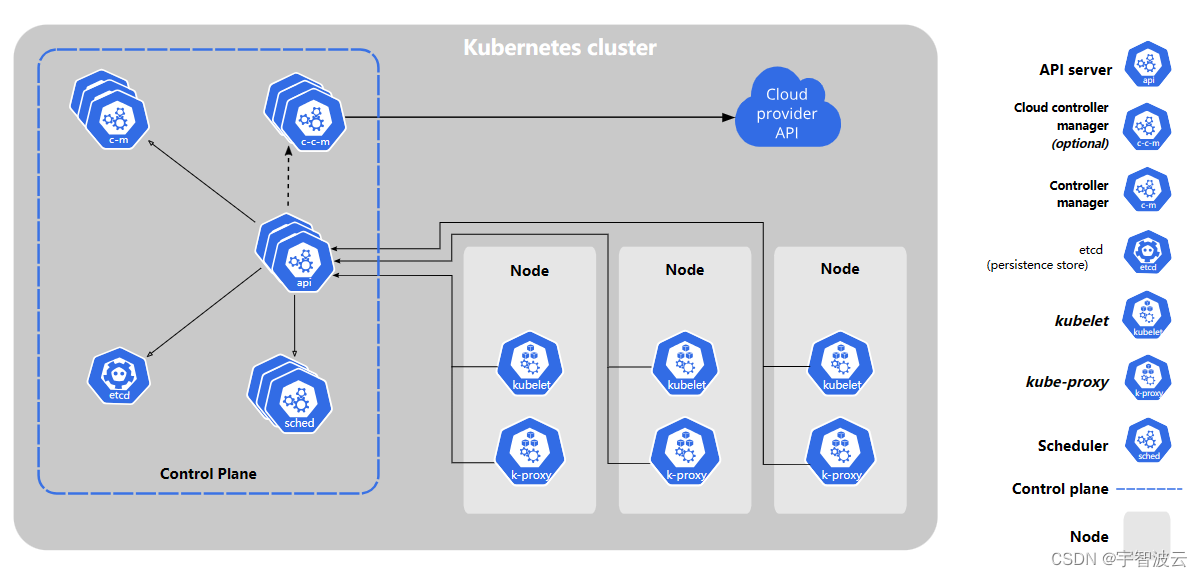
修炼k8s+flink+hdfs+dlink(四:k8s(二)组件)
一:控制平面组件。 控制平面组件会为集群做出全局决策,比如资源的调度。 以及检测和响应集群事件,例如当不满足部署的 replicas 字段时, 要启动新的 pod)。 1. kube-apiserver。 该组件负责公开了 Kubernetes API&a…...
Android约束布局ConstraintLayout流式Flow
Android约束布局ConstraintLayout流式Flow <?xml version"1.0" encoding"utf-8"?> <androidx.constraintlayout.widget.ConstraintLayout xmlns:android"http://schemas.android.com/apk/res/android"xmlns:app"http://schemas.…...

Android JNI代码语法解释
文章目录 JNI中的JNIEXPORT、JNIIMPORT和JNICALLJVM如何查找native方法①按照JNI规范的命名规则②调用JNI提供的RegsterNatives函数,将本地函数注册到JVM中示例代码 JNI数据类型JNI字符串的处理①获取字符串②释放字符串③创建字符串④其他字符串处理API JNI中的JNI…...
小程序和前台开发软件定制的相关信息|APP网站搭建
小程序和前台开发软件定制的相关信息 在如今数字化时代,软件、小程序和前台开发软件定制已经成为了企业必备的工具之一。那么,这些工具到底有什么作用呢?接下来,我将为大家详细介绍。 首先,让我们来了解一下软件。软件…...
JVM监控及诊断工具-GUI篇
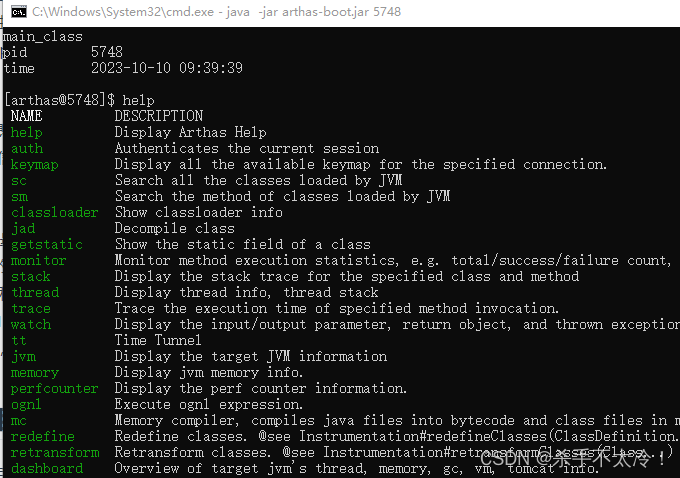
文章目录 JVM监控及诊断工具-GUI篇工具概述JConsoleVisual VM再谈内存泄漏Java中内存泄漏的8种情况Arthas(阿尔萨斯)康师傅使用阿尔萨斯的例子help指令 JVM监控及诊断工具-GUI篇 工具概述 使用上一章命令行工具或组合能获取目标Java应用性能相关的基础…...

【C++STL基础入门】list基本使用
文章目录 前言一、list简介1.1 list是什么1.2 list的头文件 二、list2.1 定义对象2.2 list构造函数2.3 list的属性函数 总结 前言 STL(Standard Template Library)是C标准库的一个重要组成部分,提供了一套丰富的数据结构和算法,可…...
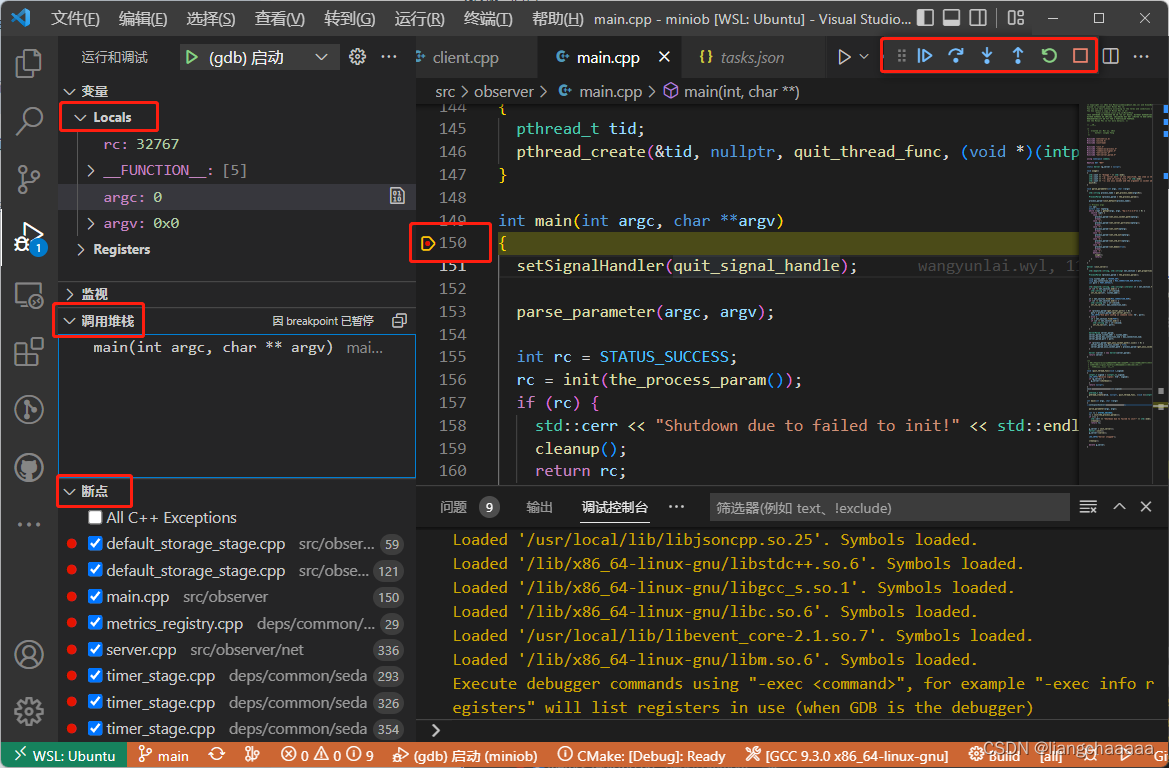
WSL+vscode配置miniob环境
1.配置WSL Windows Subsystem for Linux入门:安装配置图形界面中文环境vscode wu-kan 2.获取源码 找个位置Git Bash然后拉取代码 git clone https://github.com/oceanbase/miniob.git 3.安装相关依赖 https://gitee.com/liangcha-xyy/source/blob/master/how…...

Flutter SliverAppBar 吸顶效果
吸顶是常见的布局,主要使用的是CustomScrollView 和SliverApp组件实现的 页面布局 overrideWidget build(BuildContext context) {return CustomScrollView(controller: controller.scrollController!,physics: const BouncingScrollPhysics(),slivers: [SliverApp…...

Java Spring Boot 自动装配:简化配置和提高开发效率
Spring Boot 自动装配是 Spring Boot 提供的一种特性,它可以根据应用程序的依赖关系和配置信息,自动配置应用程序的各种组件和功能。这样,开发者可以将更多的精力放在业务逻辑的实现上,而不需要手动配置和管理各种组件。 1. 自动…...

对象转换之modelmapper
1. 官网地址:http://modelmapper.org 源码地址:GitHub - modelmapper/modelmapper: Intelligent object mapping 2.实现原理: 主要是基于匹配策略进行属性的转化,目前支持三种策略: 2.1 Standard(默认标准…...
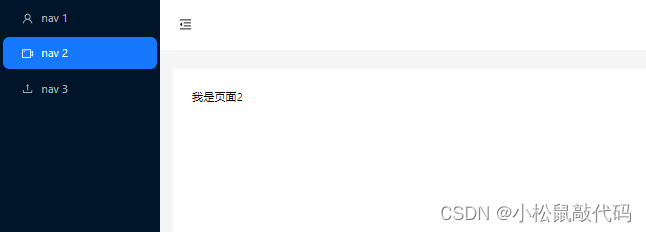
Ant Design+react 路由跳转
今天我们来继续探讨react的路由跳转 首先,创建router文件夹中的index import { lazy } from "react"; import { Outlet,useRoutes } from react-router-dom; //引入页面,引用了路由懒加载 const One lazy(() > import(../pages/one)); c…...

自动售货机哪个品牌好?2026年选购避坑全攻略~YH
经常有朋友问我:“自动售货机到底选哪个牌子?”说实话,这个问题我之前也纠结过。市面上做自动售货机的品牌不下几十家,价格从几千到几万都有,广告一个比一个响。但真正用下来,才知道差别有多大。今天就把这…...

3个步骤让你的Mac原生支持200+视频格式预览
3个步骤让你的Mac原生支持200视频格式预览 【免费下载链接】QuickLookVideo This package allows macOS Finder to display thumbnails, static QuickLook previews, cover art and metadata for most types of video files. 项目地址: https://gitcode.com/gh_mirrors/ql/Qu…...
可视化STM32引脚波形)
告别盲调!用Keil自带的逻辑分析仪(Debug Simulator)可视化STM32引脚波形
告别盲调!用Keil自带的逻辑分析仪(Debug Simulator)可视化STM32引脚波形 在嵌入式开发中,调试环节往往占据整个开发周期的40%以上时间。对于STM32开发者而言,传统的调试方式主要依赖LED闪烁观察或串口打印输出,这种方式不仅效率低…...

初次接触大模型API的开发者选择Taotoken作为起点的主要考量与体验
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 初次接触大模型API的开发者选择Taotoken作为起点的主要考量与体验 对于初次接触大模型API的开发者而言,面对众多服务商…...

前端开发从入门到精通:Vue3+TypeScript实战教程
一、为什么软件测试从业者要学Vue3TypeScript在软件测试领域,尤其是自动化测试和性能测试方向,懂前端开发技术早已不是加分项,而是必备技能。作为测试从业者,掌握Vue3TypeScript能为你的职业发展带来多重优势:…...

避开CASA模型NPP估算的那些坑:我的IDL代码调试与参数优化心得
避开CASA模型NPP估算的那些坑:我的IDL代码调试与参数优化心得 第一次用CASA模型估算NPP时,我对着屏幕上的异常结果发呆了半小时——明明按照教程一步步操作,为什么输出的NPP值会出现大面积负值?后来才发现,温度胁迫因子…...

测试岗真的是“青春饭”吗?40岁资深测试专家的职业复盘
在IT行业的诸多岗位中,软件测试岗常常被贴上“青春饭”的标签。不少从业者,尤其是刚入行的年轻人,总会在某个深夜陷入焦虑:“我到了35岁、40岁,还能在这个岗位上立足吗?”作为一名在测试领域深耕20年&#…...

CW32驱动S12SD紫外线传感器:I2C通信、数据解析与嵌入式实践
1. 项目概述与核心需求解析最近在做一个户外环境监测的小玩意儿,需要实时监测紫外线强度,选来选去,最终敲定了S12SD这款紫外线传感器模块。之所以选它,一方面是因为它直接输出数字信号,省去了模拟信号调理的麻烦&#…...

AI 高性能笔记本电脑高效紧凑型功率 MOSFET 完整选型方案
随着 AI 算力在笔记本电脑中的爆发式增长(如本地大模型、智能温控、性能调度),电源架构对功率 MOSFET 提出严苛要求:超高电流密度、极低损耗、超小封装、逻辑电平驱动。微碧半导体(VBsemi)基于先进的 Trenc…...
架构与应用解析)
Arm Ethos-U65 NPU性能监控单元(PMU)架构与应用解析
1. Arm Ethos-U65 NPU性能监控单元架构解析 性能监控单元(PMU)是现代处理器架构中不可或缺的调试与分析模块,尤其在AI加速器领域更是性能调优的关键工具。Arm Ethos-U65 NPU作为面向嵌入式设备的神经网络处理器,其PMU设计充分考虑…...