[产品体验] GPT4识图功能
相关文章:

[产品体验] GPT4识图功能
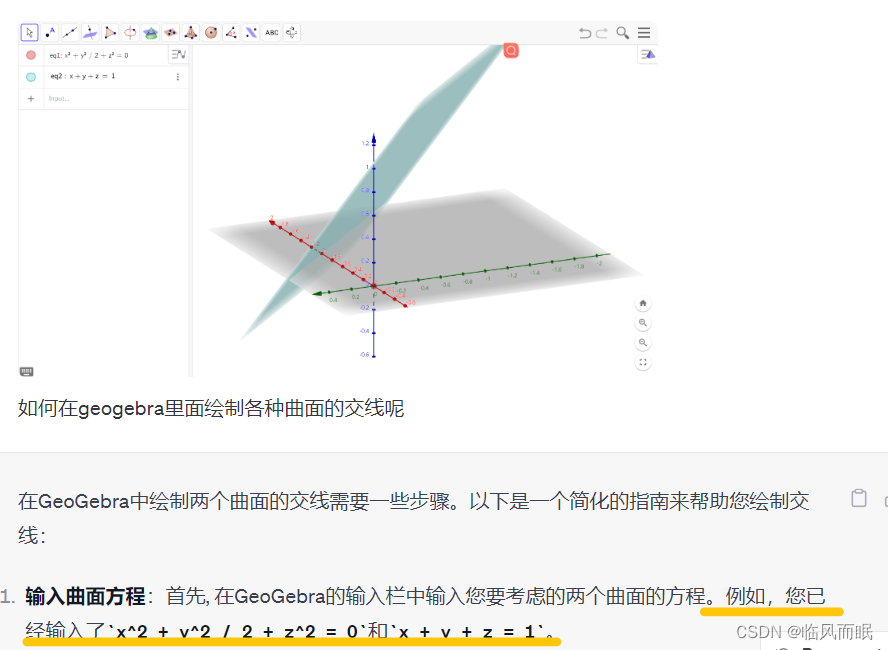
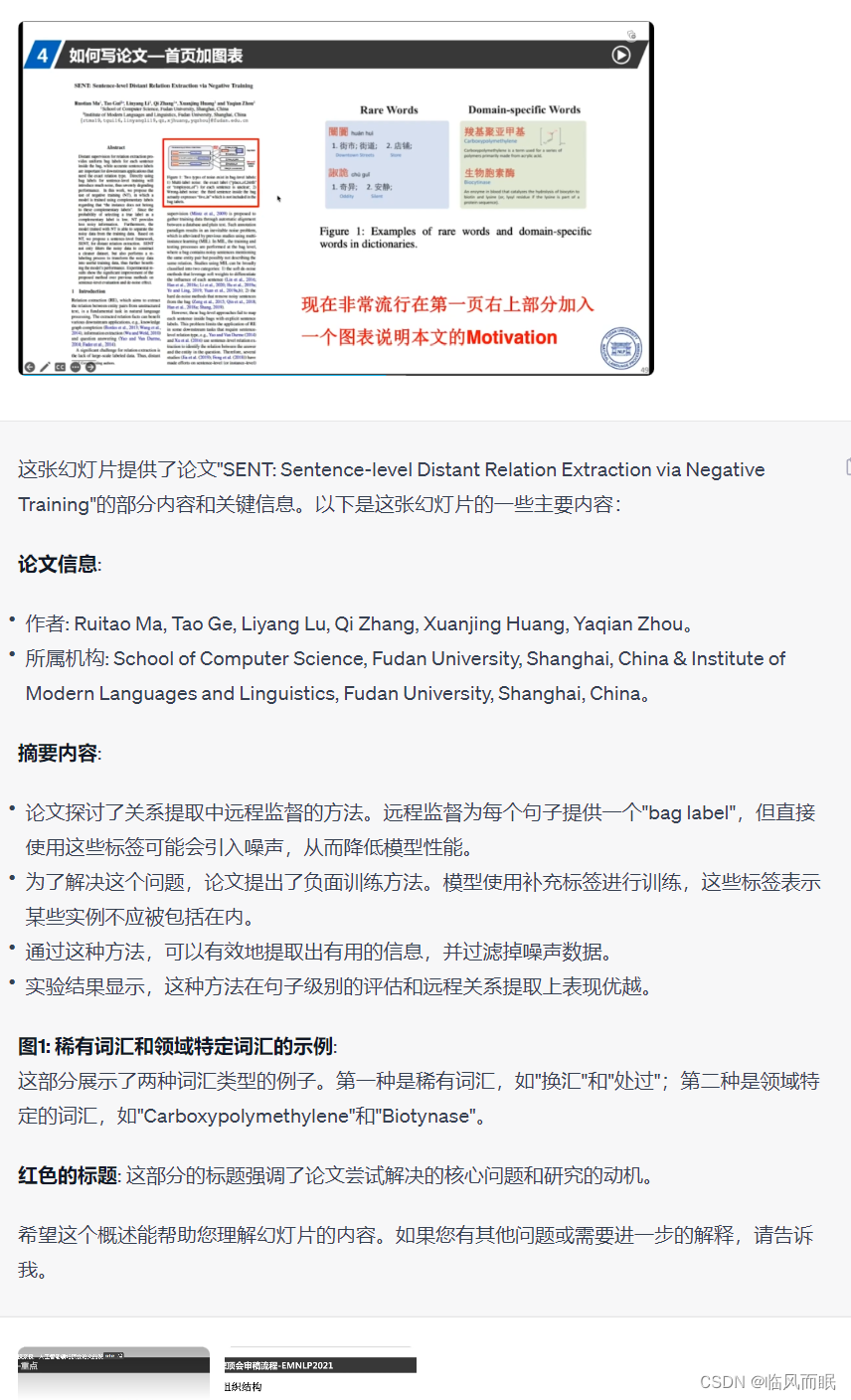
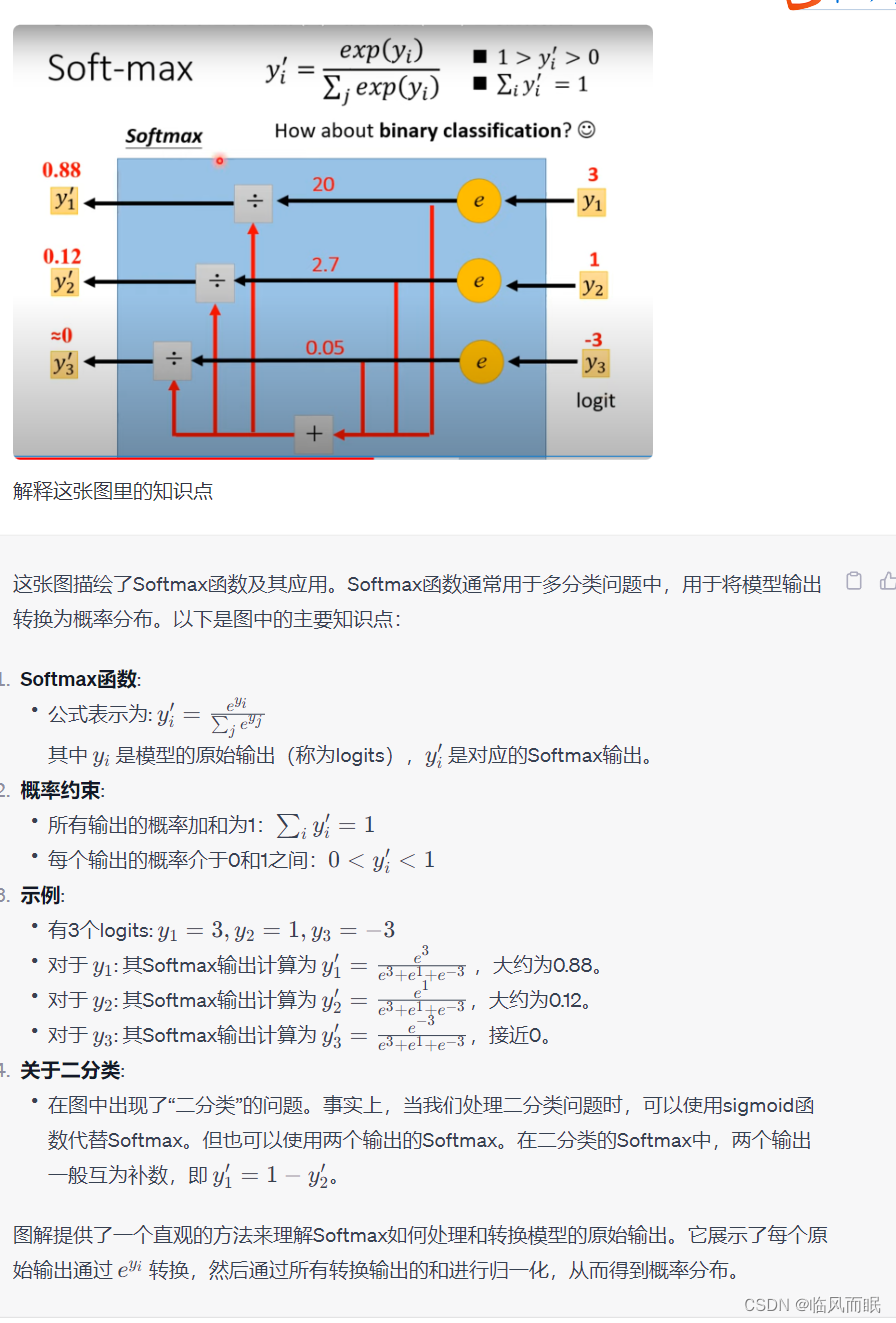
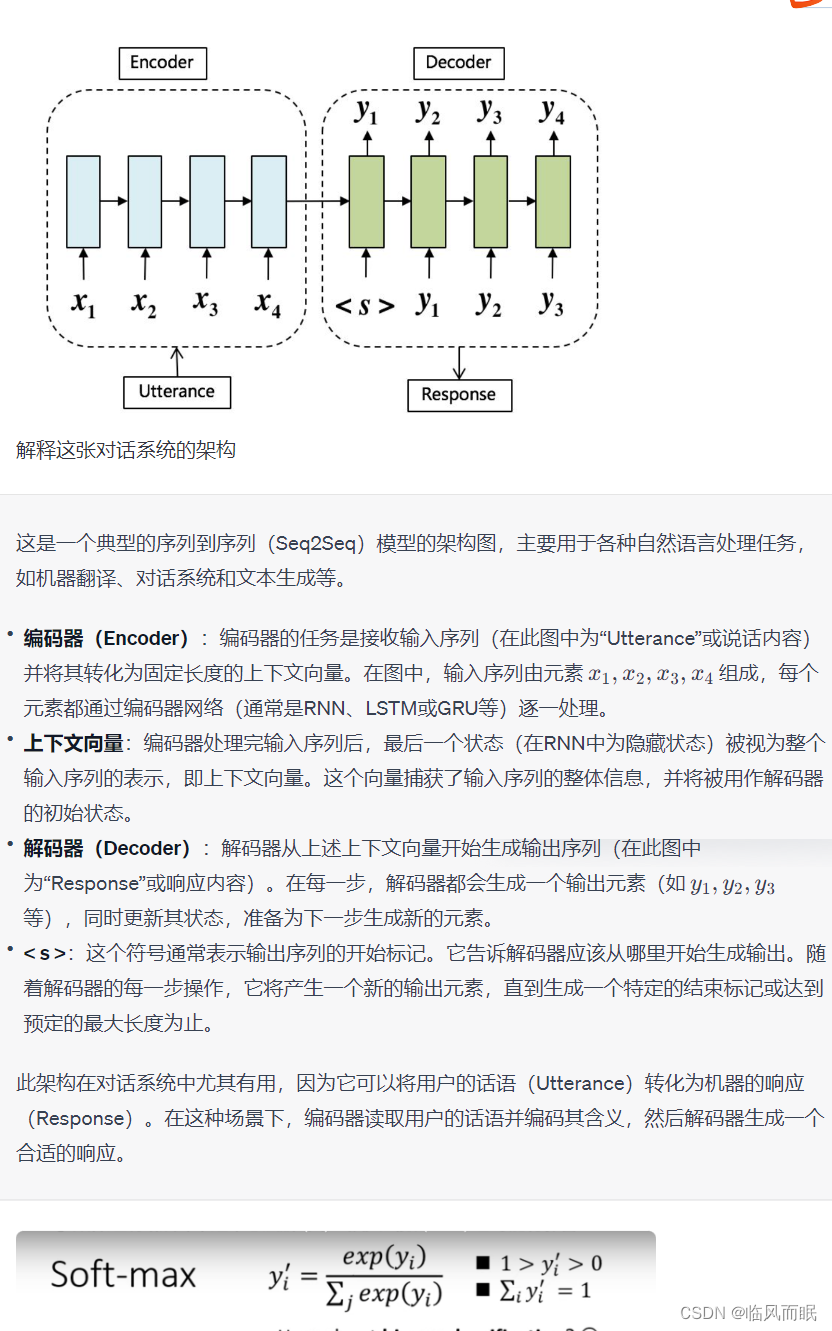
[产品体验] GPT4识图功能 图片配文字超强的OCR能力知识问答多图解释 打开chatgpt的时候突然发现能用识图了,赶紧去体验一下,大大的震撼… 图片配文字 超强的OCR能力 我传上去的图片并不清晰… 还能准确识别,orz ! 知识问答 多…...
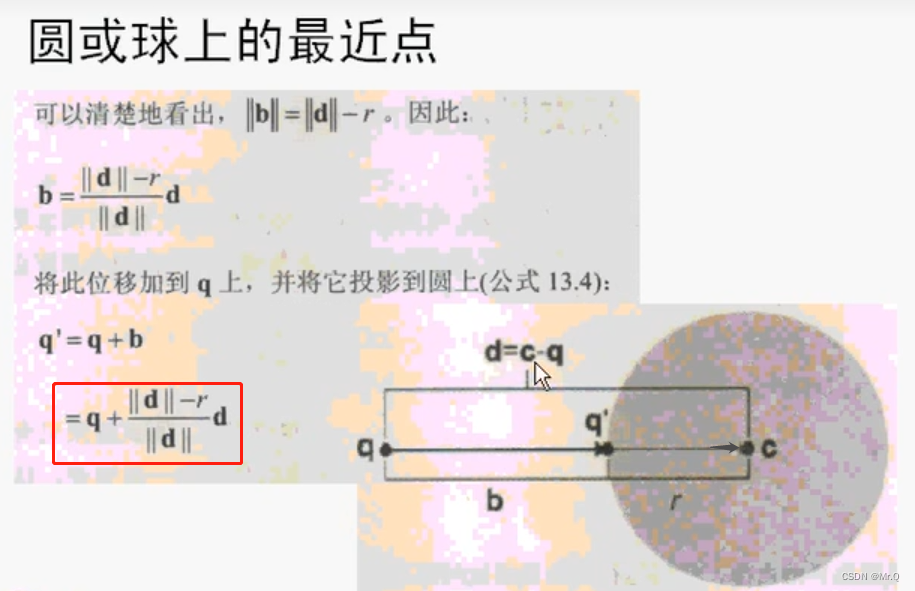
《3D 数学基础》几何检测-最近点
目录 1. 直线上的最近点 2. 射线上的最近点 3. 点到平面的距离 4. 圆或球上的最近点 5. AABB上的最近点 1. 直线上的最近点 q是距离q的最近点,也就是q在直线上的投影。 其中p是直线上的点(向量表示),n是直线的法向量&#x…...

动态规划 -背包问题-详解
问题 注:大佬对此类问题的解法:动态规划背包问题总结 给你一个由 不同 整数组成的数组 nums ,和一个目标整数 target 。请你从 nums 中找出并返回总和为 target 的元素组合的个数。 题目数据保证答案符合 32 位整数范围。 示例 1ÿ…...

Bootstrap-- 媒体特性
最大、最小宽度例子: 横屏与竖屏例子: 宽度比与像素比例子:...

c# 用非递归的写法实现递归
最近写代码碰到了一个bug,就是递归次数太多爆堆栈了,然后就写了一个递归工具来解决这个问题。 using System; using System.Collections.Generic;/// <summary> /// 递归工具 /// </summary> public static class RecursionTool {//递归方式…...
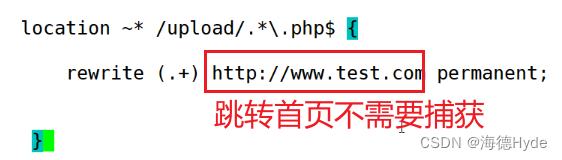
nginx之location的优先级和nginx的重定向
一、nginx之location的优先级和匹配方式(重点) (一)nginx的正则表达式 nginx的正则表达式 符号 含义 ^ 字符串的起始位置(以什么开头) $ 字符串的结束位置(以什么结尾) * 匹…...

【计算机网络】——前言计算机网络发展的历程概述
主页点击直达:个人主页 我的小仓库:代码仓库 C语言偷着笑:C语言专栏 数据结构挨打小记:初阶数据结构专栏 Linux被操作记:Linux专栏 LeetCode刷题掉发记:LeetCode刷题 算法:算法专栏 C头…...

eventfd
1. #include <sys/eventfd.h> int eventfd(unsigned int initval, int flags); //创建eventfd 参数含义: initval:创建eventfd时它所对应的64位计数器的初始值; flags:eventfd文件描述符的标志,可由三种选项组…...

BES耳机空间音频技术实现
BES耳机空间音频技术实现 是否需要申请加入数字音频系统研究开发交流答疑群(课题组)?加我微信hezkz17, 本群提供音频技术答疑服务 音响和耳机在空间音频技术上实现方式是不同的 虚拟现实可谓是空间音频技术最具代表性的应 用领域。虽然虚拟现实的起源可以追溯到1 9 6 8年, …...
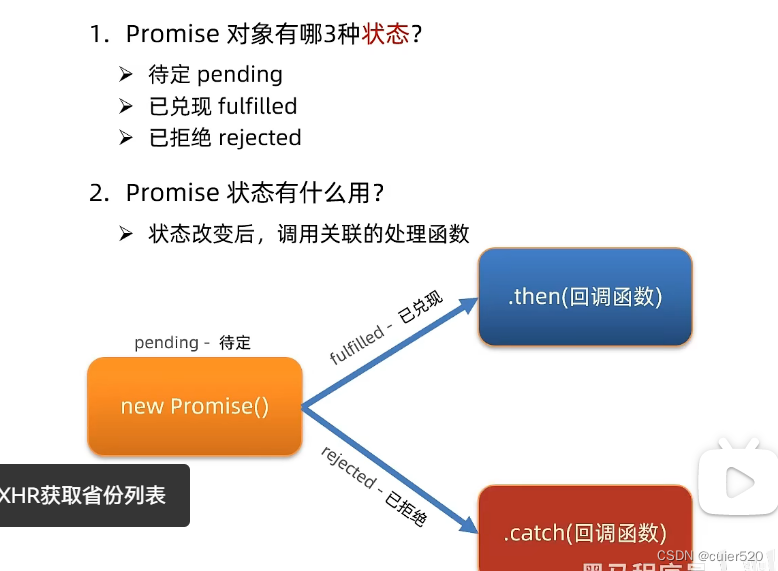
day27--AJAX(bootstrap之modal,toast;接口文档的一些用法;AJAX原理)
目录 Bootstrap之Modal: 显示和隐藏方法 通过自定义属性: 使用JS来控制弹框: Bootstrap之Toast: 接口文档一些用法: 删除图书: 图片上传: 图片上传步骤: 修改头像…...
:杂七杂八的记录)
【ArcGIS Pro二次开发】(70):杂七杂八的记录
本文用于记录一些使用频率较高但归类繁杂,非系统性的一些代码。 主要方便自己使用和查阅,随时更新。 1、从GDB数据库中打开【FeatureDataset\FeatureClass\Table】 using Geodatabase gdb new Geodatabase(new FileGeodatabaseConnectionPath(new Uri…...
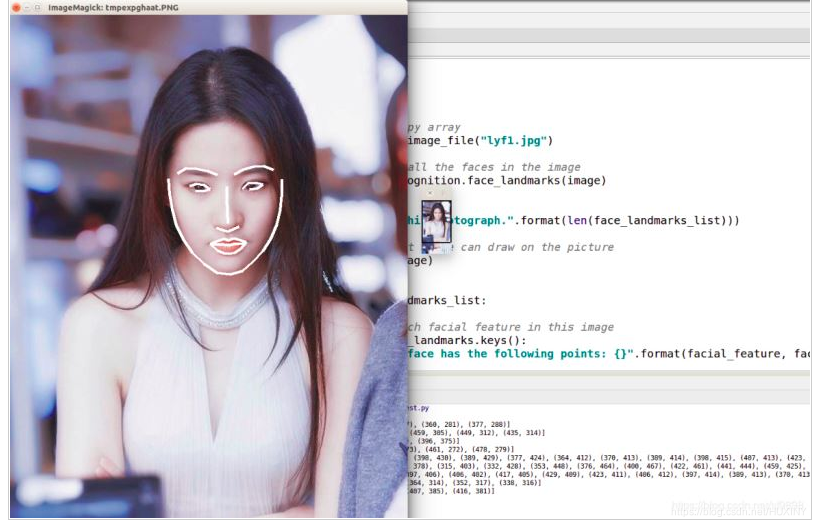
竞赛选题 深度学习 机器视觉 人脸识别系统 - opencv python
文章目录 0 前言1 机器学习-人脸识别过程人脸检测人脸对其人脸特征向量化人脸识别 2 深度学习-人脸识别过程人脸检测人脸识别Metric Larning 3 最后 0 前言 🔥 优质竞赛项目系列,今天要分享的是 🚩 深度学习 机器视觉 人脸识别系统 该项目…...
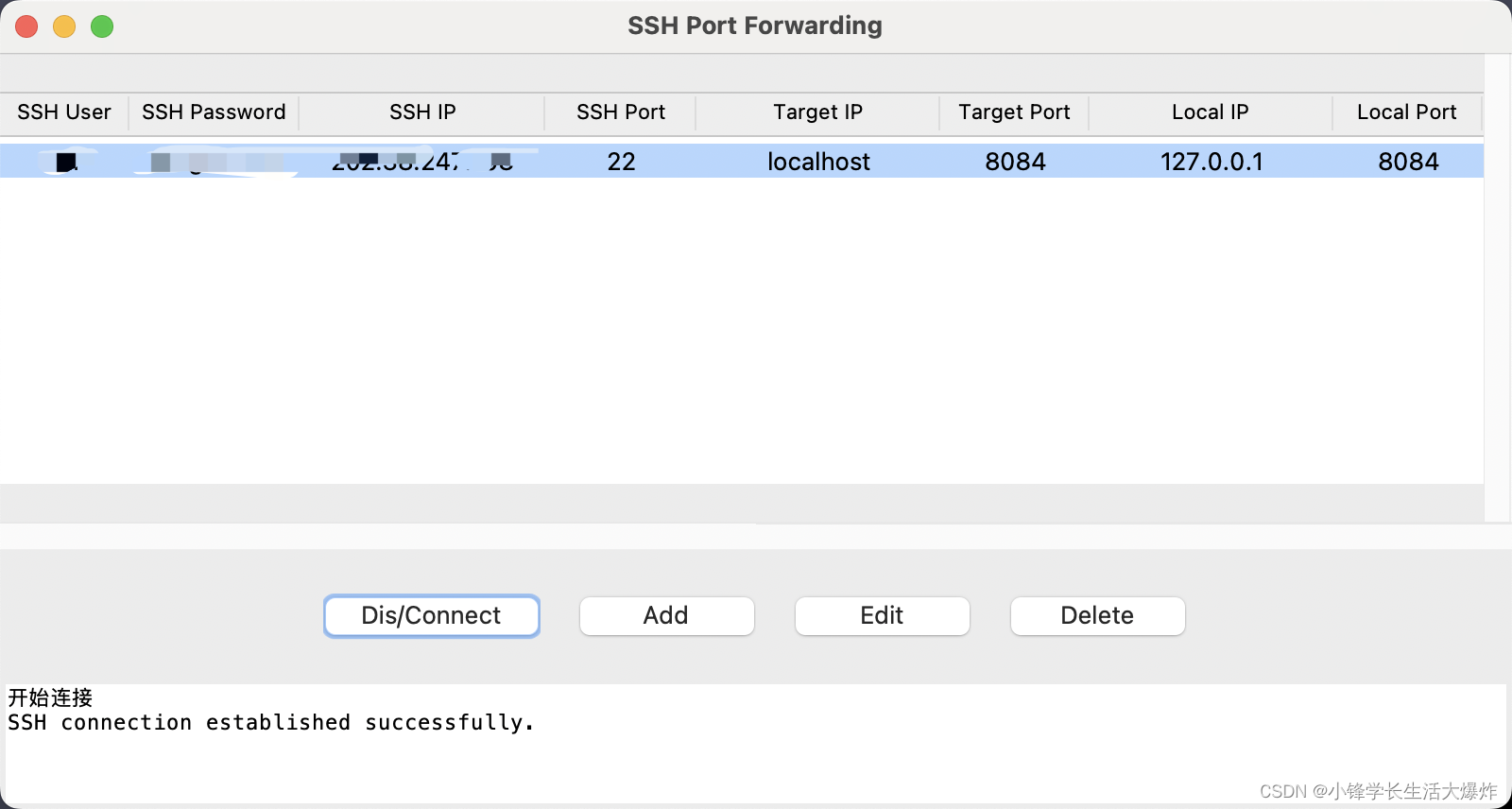
【工具】SSH端口转发管理器,专门管理SSH Port Forwarding
转载请注明出处:小锋学长生活大爆炸[xfxuezhang.cn] 开源代码看这里:http://xfxuezhang.cn/index.php/archives/1151/ 背景介绍 有时候需要用到ssh的端口转发功能。目前来说,要么是cmd里手敲指令,但每次敲也太麻烦了;或…...
opencv-phase 函数
计算梯度强度和方向 梯度的方向与边缘的方向总是垂直的。图像中的边缘可以指向各个方向,通常会取水平(左、右)、垂直(上、下)、对角线(左上、右上、左下、右下)等八个不同的方向计算梯度。 角度…...

44.ES
一、ES。 (1)es概念。 (1.1)什么是es。 (1.2)es的发展。 es是基于lucene写的。 (1.3)总结。 es是基于lucene写的。 (2)倒排索引。 (3…...
分权分域有啥内容?
目前的系统有什么问题? 现在我们的系统越来越庞大,可是每一个人进来的查看到的内容完全一样,没有办法灵活的根据不同用户展示不同的数据 例如我们有一个系统,期望不同权限的用户可以看到不同类型的页面,同一个页面不…...
6.Docker搭建RabbitMQ
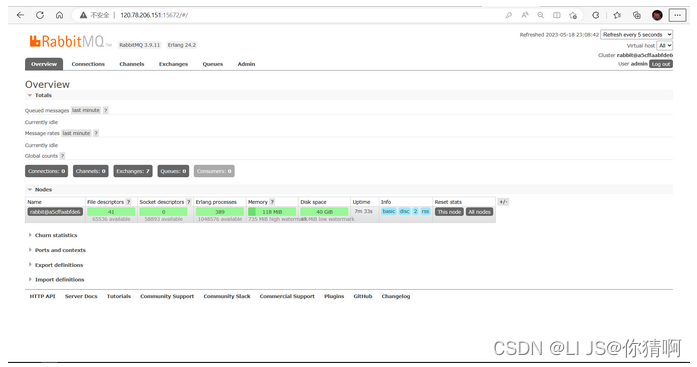
1、端口开放 如果在云服务上部署需在安全组开通一下端口:15672、5672、25672、61613、1883。 15672(UI页面通信口)、5672(client端通信口)、25672(server间内部通信口)、61613(stomp 消息传输)、1883(MQTT消息队列遥测传输)。 2、安装镜像 docker pull rabbitmq 3、…...
用 docker 创建 jmeter 容器, 实现性能测试,该如何下手?
用 docker 创建 jmeter 容器, 实现性能测试 我们都知道,jmeter可以做接口测试,也可以用于性能测试,现在企业中性能测试也大多使用jmeter。docker是最近这些年流行起来的容器部署工具,可以创建一个容器,然后把项目放到…...
4年软件测试,突破不了20K,太卷了。。。
先说一个插曲:上个月我有同学在深圳被裁员了,和我一样都是软件测试,不过他是平安外包,所以整个组都撤了,他工资和我差不多都是14K。 现在IT互联网已经比较寒冬,特别是软件测试,裁员先裁测试&am…...
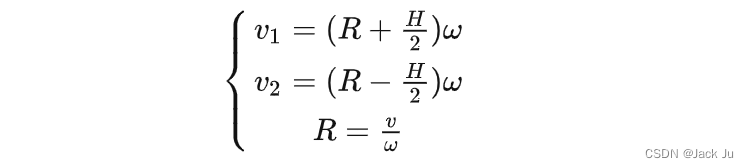
机器人控制算法——两轮差速驱动运动模型
1.Introduction 本文主要介绍针对于两轮差速模型的逆运动学数学推导。因为在机器人控制领域,决策规划控制层给执行器输出的控制指令v(车辆前进速度)和w(角速度),因此,我们比较关心,当底层两个驱动电机接收到此信息,如何…...

5分钟终极指南:用HunterPie轻松提升《怪物猎人:世界》狩猎效率
5分钟终极指南:用HunterPie轻松提升《怪物猎人:世界》狩猎效率 【免费下载链接】HunterPie-legacy A complete, modern and clean overlay with Discord Rich Presence integration for Monster Hunter: World. 项目地址: https://gitcode.com/gh_mirr…...
)
基于单相全波晶闸管的基本交流电压控制器,带电阻负载(Simulink仿真实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...
)
TVA智能体范式的工业视觉革命(7)
重磅预告:本专栏将独家连载系列丛书《智能体视觉技术与应用》部分精华内容,该书是世界首套系统阐述“因式智能体”视觉理论与实践的专著,特邀美国 TypeOne 公司首席科学家、斯坦福大学博士 Bohan 担任技术顾问。Bohan先生师从美国三院院士、“…...

WarcraftHelper:魔兽争霸3终极兼容性增强插件完整指南
WarcraftHelper:魔兽争霸3终极兼容性增强插件完整指南 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper WarcraftHelper是一款专为《魔兽争霸…...

AI智能体的开发与测试
AI智能体(AI Agent)的开发与测试是一项将大语言模型(LLM)能力转化为企业级稳定应用的系统工程。它不仅需要先进的算法,更依赖于严密的工程架构与创新的测试方法。以下是AI智能体开发与测试的全景指南:第一部…...

解锁Godot游戏宝库:PCK文件解包实战指南
解锁Godot游戏宝库:PCK文件解包实战指南 【免费下载链接】godot-unpacker godot .pck unpacker 项目地址: https://gitcode.com/gh_mirrors/go/godot-unpacker 你是否曾经好奇过Godot游戏中的精美画面和动人音效是如何封装的?那些神秘的PCK文件就…...

DXL-400E 手持式无线通信测试仪:交通通信运维的便携利器
DXL-400E 手持式无线通信测试仪是成都鼎讯信通科技推出的经济型手持式测试设备,覆盖 9kHz 至 6.1GHz 宽频范围,集成频谱分析、场强测量、干扰排查等核心功能,以轻量化设计和高性价比,成为铁路、高速等交通领域无线通信运维的常用工…...

构建部署标准化:Code-Agnostic理念在混合技术栈下的实践
1. 项目概述:一个“代码无关”的构建与部署新思路最近在折腾一个老项目的现代化改造,遇到了一个经典难题:项目里混杂着Python、Java、Node.js,甚至还有几段古老的Perl脚本。每次构建部署,都得为每种语言准备一套环境、…...

机器人全身控制与SLAM系统核心技术解析
1. 机器人全身控制技术解析Sprout机器人采用的全身控制策略(Whole-Body Policy)通过分层控制架构实现了稳定运动与精准操作的平衡。该系统将控制分为三个主要层级:骨盆姿态控制、上肢柔顺控制和高度调节。这种分层设计使得机器人能够在保持上…...
)
告别Vivado依赖!手把手教你用Modelsim独立仿真Vivado IP核(附PLL报错解决方案)
深度解析:如何高效利用Modelsim独立仿真Vivado IP核 在FPGA开发领域,仿真环节往往成为项目进度的瓶颈。许多工程师习惯性地依赖Vivado自带的仿真环境,却忽视了专业仿真工具Modelsim的强大性能。本文将带您突破这一局限,掌握脱离Vi…...