3D包容盒子
原理简述
包围体(包容盒)是一个简单的几何空间,里面包含着复杂形状的物体。为物体添加包围体的目的是快速的进行碰撞检测或者进行精确的碰撞检测之前进行过滤(即当包围体碰撞,才进行精确碰撞检测和处理)。包围体类型包括球体、轴对齐包围盒(AABB)、有向包围盒(OBB)、8-DOP以及凸壳(CONVEX HULL)。
常见包容盒( Bounding Volumes)分类:
- 包容球:SPHERE 用球体包围整个几何体,用于相交测试很方便,但是其紧密型差,周围空隙较大,当物体变形后,包围球需要重新计算。当对象进行旋转运动时,包围球不需要做任何更新,这是包围球的优势,即当几何对象频繁进行旋转运动时,使用包围球效率较高。
- AABB包容盒:Axially Aligned Bounding Box,3D环境下的AABB盒即一个六面体,每个边都平行于一个坐标平面,较简单,但紧密性较差,当物体旋转、形变之后需要对AABB进行更新。本身的长宽高根据物体大小而定。
- OBB包容盒:Oriented Bounding Box,此方法紧密型较好,可以降低参与相交测试的包容盒数目,因此性能要优于AABB和包容球。当物体发生旋转,仅需对OBB进行相同的旋转即可,但是当物体形变后,更新OBB的代价较大,故不适用那些软体的对象。
- 8-DOP:8-DOP是由八个平面构成的。每个平面都与其他七个平面相交,形成一个闭合的多边形。这些平面可以通过基于物体的最小和最大坐标值来计算。也就是说,对于给定的物体,可以找到其最小和最大的X、Y和Z坐标值,并使用这些值来计算八个平面。8-DOP可以用于快速估计物体的包围盒,以便进行碰撞检测等操作。由于它是使用八个面来近似包围物体的,因此可能不够精确,但通常能提供一个较好的近似结果。它在某些情况下比其他简单的包围体(如轴对齐AABB包围盒)更有效,因为它可以更好地适应物体的形状。
- 凸壳(CONVEX HULL):凸壳(Convex Hull)是指包含一组点集的最小凸多边形或凸体。在三维空间中,凸壳是一个封闭的、由凸面构成的立体结构。给定一组三维点,凸壳可以用来估计点云的整体形状,并提供一种紧凑的表示形式。计算凸壳的算法有很多种,其中著名的算法包括:Graham扫描算法:基于极角排序的凸壳计算算法。Jarvis march算法(也称为Gift Wrapping算法):通过不断选择点集中的最外层点来计算凸壳。QuickHull算法:利用分治法的思想,递归地划分空间以计算凸壳。3D Incremental算法:从一个简单的初始凸壳开始,逐步添加点以构建凸壳。

如上图所示,越靠右,包容效果好、越紧密。但是检测速度更慢,也更消耗内存资源。
代码实现
#include <vector>
#include <thread>
#include <pcl/features/moment_of_inertia_estimation.h>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/visualization/cloud_viewer.h>using namespace std::chrono_literals;int main(int argc, char** argv)
{pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);// 从文件读取点云图pcl::PCDReader reader;reader.read("G:/vsdata/PCLlearn/PCDdata/bun0.pcd", *cloud);// 创建惯性矩估算对象,设置输入点云,并进行计算pcl::MomentOfInertiaEstimation <pcl::PointXYZ> feature_extractor;feature_extractor.setInputCloud(cloud);feature_extractor.compute();std::vector <float> moment_of_inertia;std::vector <float> eccentricity;pcl::PointXYZ min_point_AABB;pcl::PointXYZ max_point_AABB;pcl::PointXYZ min_point_OBB;pcl::PointXYZ max_point_OBB;pcl::PointXYZ position_OBB;Eigen::Matrix3f rotational_matrix_OBB;float major_value, middle_value, minor_value;Eigen::Vector3f major_vector, middle_vector, minor_vector;Eigen::Vector3f mass_center;// 获取惯性矩feature_extractor.getMomentOfInertia(moment_of_inertia);// 获取离心率feature_extractor.getEccentricity(eccentricity);// 获取AABB盒子feature_extractor.getAABB(min_point_AABB, max_point_AABB);// 获取OBB盒子feature_extractor.getOBB(min_point_OBB, max_point_OBB, position_OBB, rotational_matrix_OBB);feature_extractor.getEigenValues(major_value, middle_value, minor_value);// 获取主轴major_vector,中轴middle_vector,辅助轴minor_vectorfeature_extractor.getEigenVectors(major_vector, middle_vector, minor_vector);// 获取质心feature_extractor.getMassCenter(mass_center);pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));viewer->setBackgroundColor(0, 0, 0);viewer->addCoordinateSystem(1.0);viewer->initCameraParameters();viewer->addPointCloud<pcl::PointXYZ>(cloud, "sample cloud");// 添加AABB包容盒viewer->addCube(min_point_AABB.x, max_point_AABB.x, min_point_AABB.y, max_point_AABB.y, min_point_AABB.z, max_point_AABB.z, 1.0, 1.0, 0.0, "AABB");viewer->setShapeRenderingProperties(pcl::visualization::PCL_VISUALIZER_REPRESENTATION, pcl::visualization::PCL_VISUALIZER_REPRESENTATION_WIREFRAME, "AABB");// 添加OBB包容盒Eigen::Vector3f position(position_OBB.x, position_OBB.y, position_OBB.z);Eigen::Quaternionf quat(rotational_matrix_OBB);// position:中心位置// quat:旋转矩阵// max_point_OBB.x - min_point_OBB.x 宽度// max_point_OBB.y - min_point_OBB.y 高度// max_point_OBB.z - min_point_OBB.z 深度viewer->addCube(position, quat, max_point_OBB.x - min_point_OBB.x, max_point_OBB.y - min_point_OBB.y, max_point_OBB.z - min_point_OBB.z, "OBB");viewer->setShapeRenderingProperties(pcl::visualization::PCL_VISUALIZER_REPRESENTATION, pcl::visualization::PCL_VISUALIZER_REPRESENTATION_WIREFRAME, "OBB");pcl::PointXYZ center(mass_center(0), mass_center(1), mass_center(2));pcl::PointXYZ x_axis(major_vector(0) + mass_center(0), major_vector(1) + mass_center(1), major_vector(2) + mass_center(2));pcl::PointXYZ y_axis(middle_vector(0) + mass_center(0), middle_vector(1) + mass_center(1), middle_vector(2) + mass_center(2));pcl::PointXYZ z_axis(minor_vector(0) + mass_center(0), minor_vector(1) + mass_center(1), minor_vector(2) + mass_center(2));viewer->addLine(center, x_axis, 1.0f, 0.0f, 0.0f, "major eigen vector");viewer->addLine(center, y_axis, 0.0f, 1.0f, 0.0f, "middle eigen vector");viewer->addLine(center, z_axis, 0.0f, 0.0f, 1.0f, "minor eigen vector");while (!viewer->wasStopped()){viewer->spinOnce(10);std::this_thread::sleep_for(10ms);}return (0);
}实现效果
黄色立方体为AABB包容盒,白色立方体为OBB包容盒。 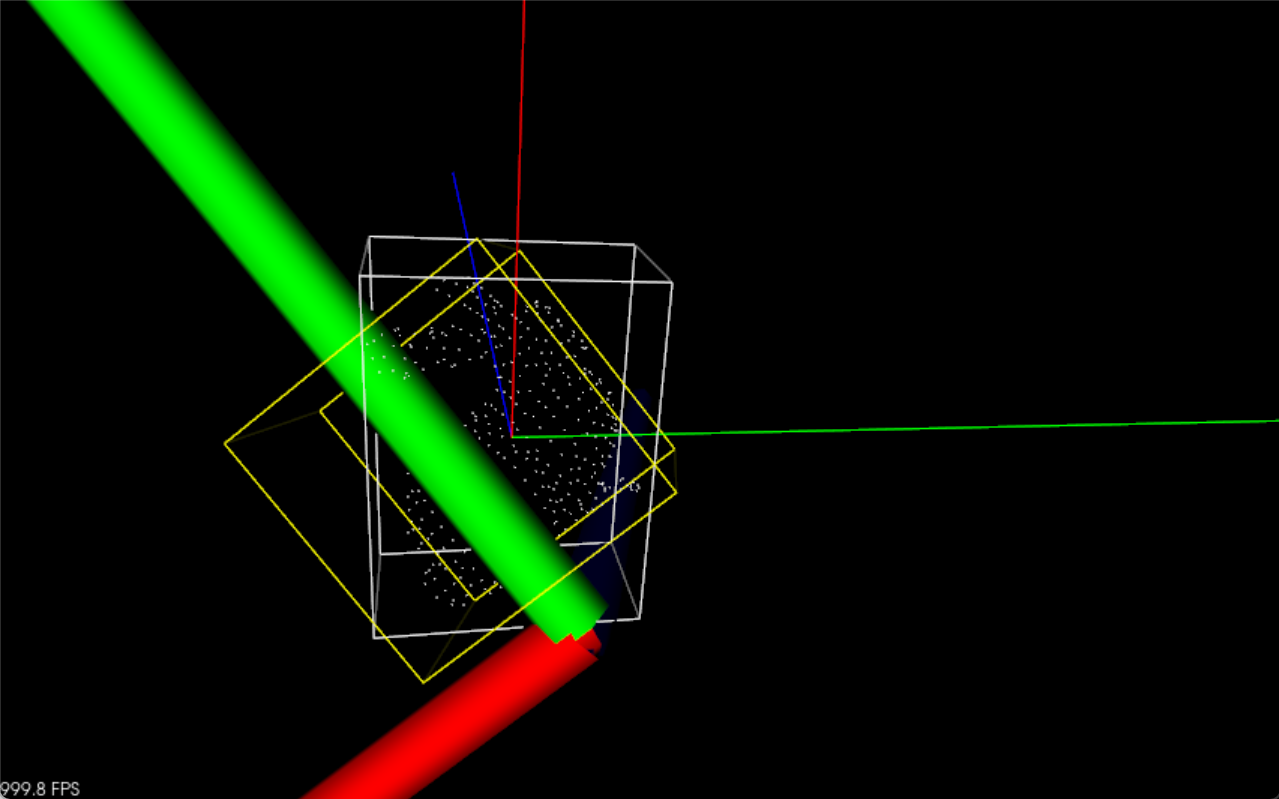
相关文章:
3D包容盒子
原理简述 包围体(包容盒)是一个简单的几何空间,里面包含着复杂形状的物体。为物体添加包围体的目的是快速的进行碰撞检测或者进行精确的碰撞检测之前进行过滤(即当包围体碰撞,才进行精确碰撞检测和处理)。包…...
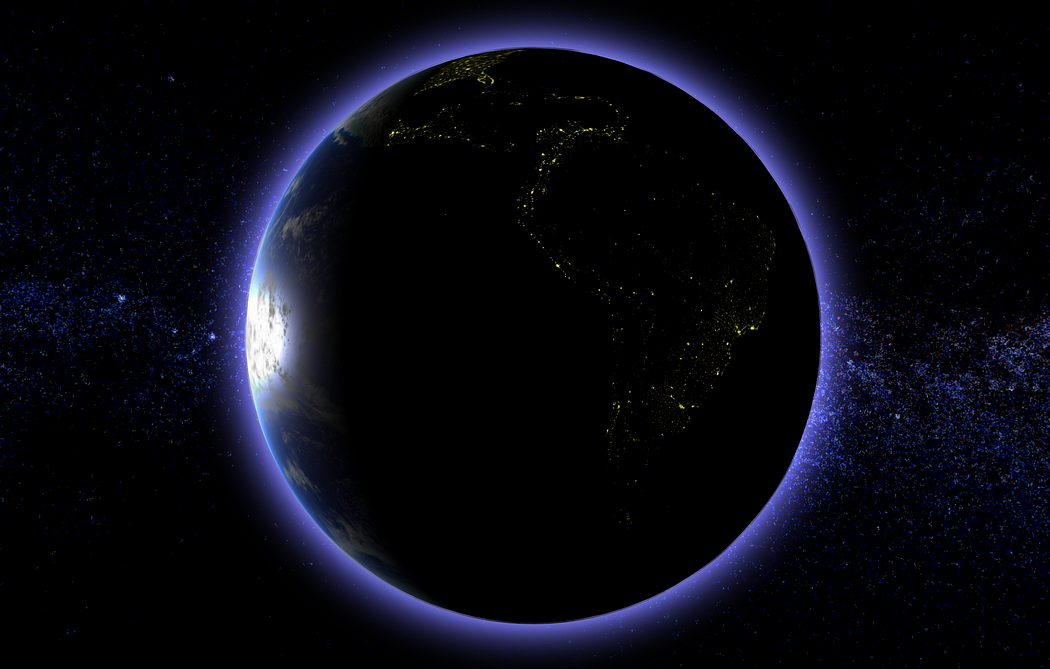
用 Three.js 创建一个酷炫且真实的地球
接下来我会分步骤讲解,在线示例在数字孪生平台。 先添加一个球体 我们用threejs中的SphereGeometry来创建球体,给他贴一张地球纹理。 let earthGeo new THREE.SphereGeometry(10, 64, 64) let earthMat new THREE.MeshStandardMaterial({map: albed…...
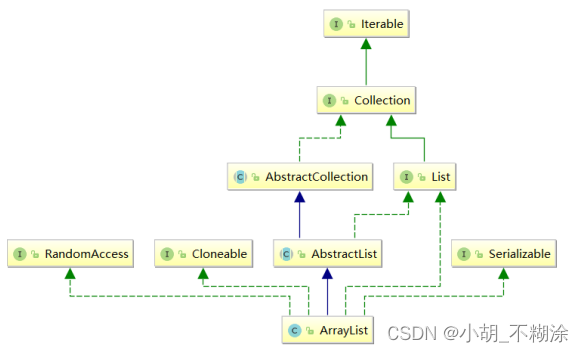
【数据结构】线性表与顺序表
⭐ 作者:小胡_不糊涂 🌱 作者主页:小胡_不糊涂的个人主页 📀 收录专栏:浅谈Java 💖 持续更文,关注博主少走弯路,谢谢大家支持 💖 线性表与顺序表 1. 线性表2. 顺序表2.1 …...
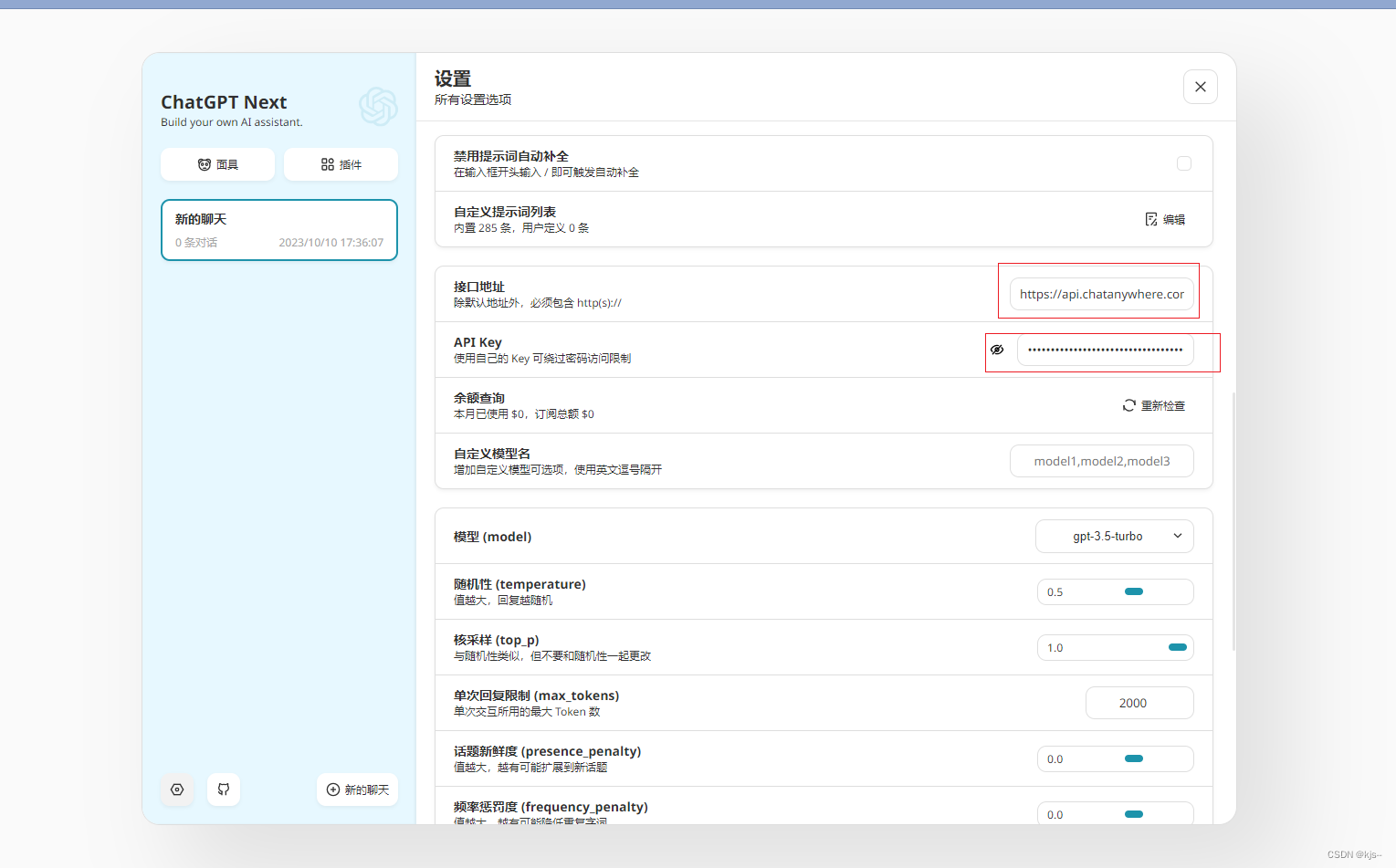
ChatGPT
chatgpt使用地址 https://mycaht.top/#/chat 申请内测免费key https://github.com/chatanywhere/GPT_API_free 设置 接口地址设置改成 https://api.chatanywhere.com.cnAPI Key设置成申请出来的免费key 开始聊天...

矿区井下智慧用电安全监测解决方案
一、背景 矿区井下作业具有复杂的环境和较高的危险性,对于用电安全的要求尤为严格。传统的管理模式和监测方法往往无法实时、准确地掌握井下用电情况,对安全隐患的排查与预防存在一定局限性。因此,引入智慧用电安全监测解决方案ÿ…...
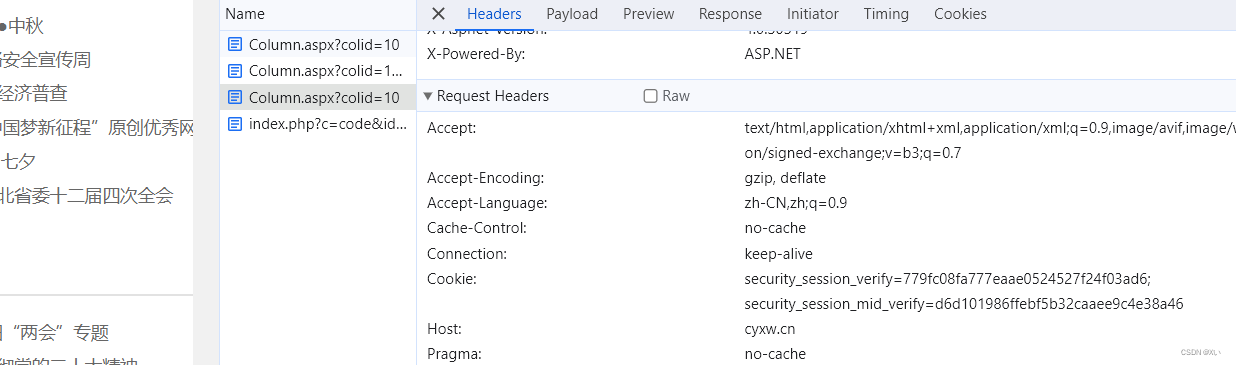
网站列表页加密:三次请求后返回内容多\r
一、抓包第一次请求 url aHR0cDovL2N5eHcuY24vQ29sdW1uLmFzcHg/Y29saWQ9MTA抓包,需要清理浏览器cookie,或者无痕模式打开网址,否则返回的包不全,依照下图中的第一个包进行requests请求 第一次请求后返回 <!DOCTYPE html>…...
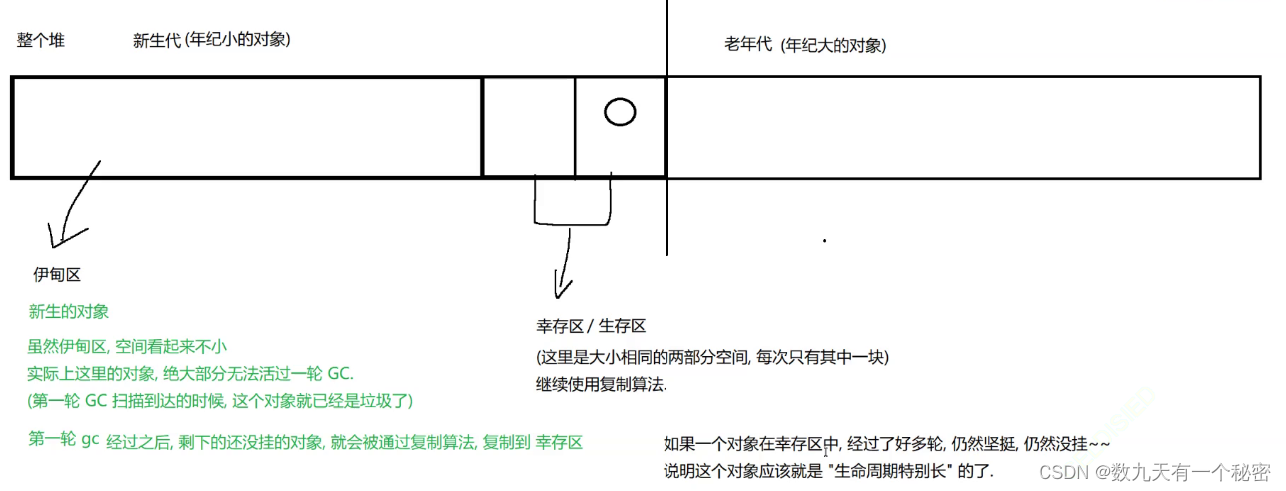
12.JVM
一.JVM类加载机制:把类从硬盘文件加载到内存中 1.java文件,编写时是一个.java文件,编译后现成一个.class的字节码文件,运行的时候,JVM就会读取.class文件,放到内存中,并且构造类对象. 2.类加载流程: a.加载:找到.class文件,打开文件,读取内容,尝试解析文件内容. b.验证:检查…...
关于网络协议的若干问题(四)
1、QUIC 是一个精巧的协议,它有哪些特性? 答:QUIC 还有其他特性,一个是快速建立连接。另一个是拥塞控制,QUIC 协议当前默认使用了 TCP 协议的 CUBIC(拥塞控制算法)。 CUBIC 进行了不同的设计&…...
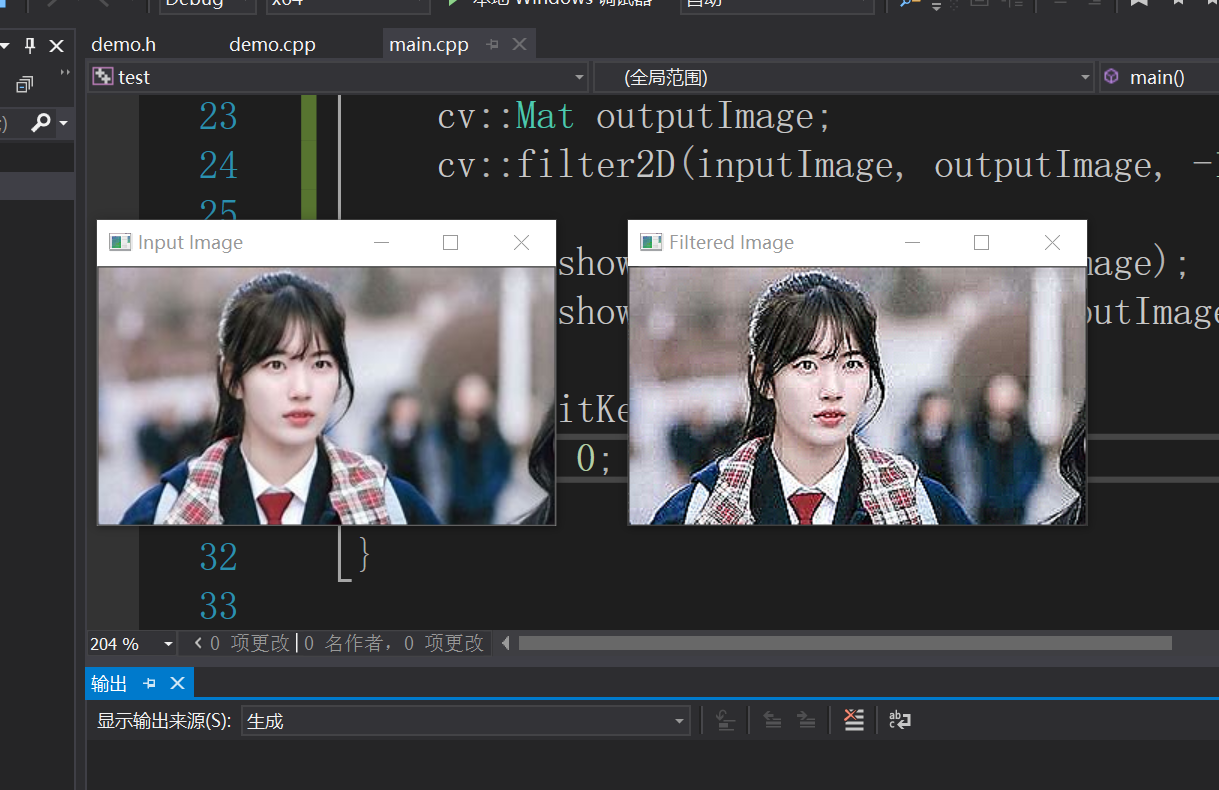
opencv图像卷积操作和常用的图像滤波函数
文章目录 opencv图像卷积操作原理,opencv中常用的图像滤波函数一、图像卷积操作原理:1、卷积操作原理图: 二、opencv常用的图像滤波函数:这些函数的主要作用是对图像进行平滑处理或去除噪声(核心目的是减少图像中的噪声࿰…...
习题1. 31
话不多说 先上代码 (defn product [ term a nxt b](defn iter [a result](if (> a b)1 (* (term a) (iter (nxt a) result))))(iter a 1)) 跟习题1.30比较起来,就是两个地方不同 乘法不能乘0 必须是1。难度来讲,跟1.30难度是一样的。增加了迭代过…...

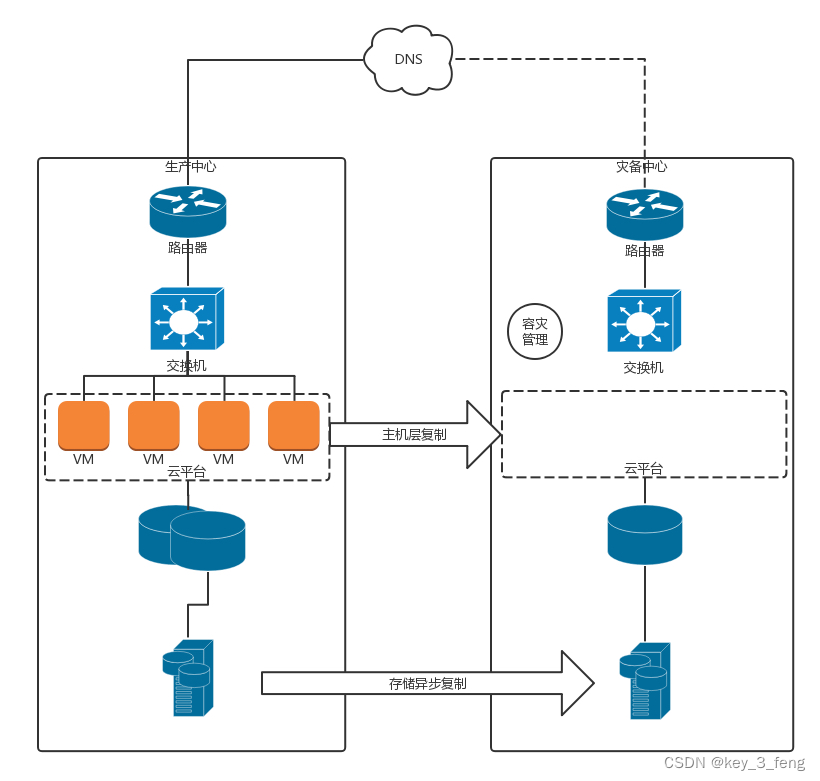
见微知著:从企业售后技术支持看云计算发展
作者:余凯 售后业务中的细微变化 作为阿里云企业容器技术支持的一员,每天会面对全球各地企业级客户提出的关于容器的各种问题,通过这几年的技术支持的经历,逐步发现容器问题客户的一些惯性,哪些是重度用户࿰…...
C++笔记之如何给 `const char*` 类型变量赋值
C笔记之如何给 const char* 类型变量赋值 code review! 文章目录 C笔记之如何给 const char* 类型变量赋值1.在C中,如果你要给一个 const char* 变量赋值,你通常有几种方法来做这件事,具体取决于你的需求。下面是一些常见的方法:…...
9.Linear Maps
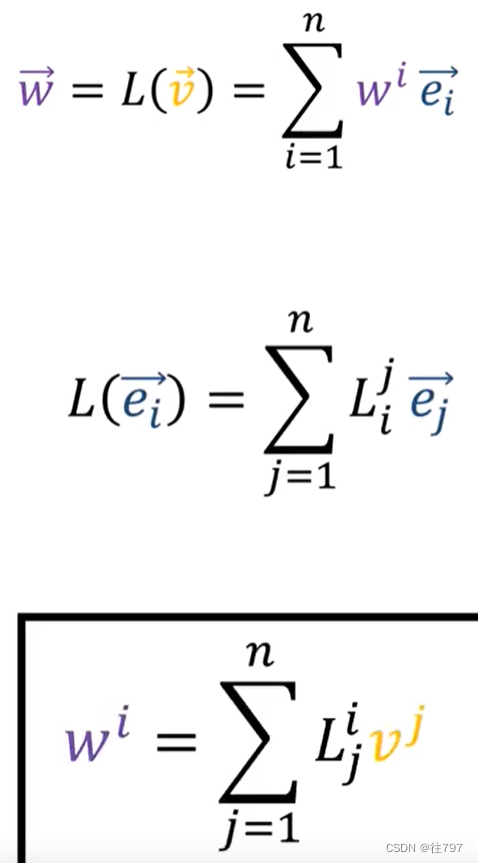
线性映射 线性映射是将向量作为输入并产生一些新向量作为输出的转换。 从坐标定义开始(数组),再到2,3,并展示它们是如何关联的 线性映射的坐标表示最终是矩阵, 1.坐标定义(数组) 列向量是向量的坐标表示…...

大数据Doris(十):添加BE步骤
文章目录 添加BE步骤 一、使用mysql连接 二、添加be...

Vue2 +Element UI 表格行合并
如果相邻数据是一致的,则单元格的行合并,指定需要合并的列,下面我是指定合并了分类和类型这两列。 先看效果 Element UI为我们的<el-table>提供了一个属性span-method:合并行或列的计算方法 下面是一个示例: html部分 - 主要是在表上指…...

SuperEdge易学易用系列-一键搭建SuperEdge集群
条件说明: 系统 公网IP 内网IP 服务器所在地 K8S版本 Centos7.9 114.116.101.254 192.168.0.245 北京 v1.22.6 Centos7.9 119.8.1.96 192.168.0.83 香港 v1.22.6 Ubuntu22 94.74.108.152 192.168.0.154 纽约 v1.22.6 1. 开始部署 1.1 两条指令从零搭建一个边缘集…...
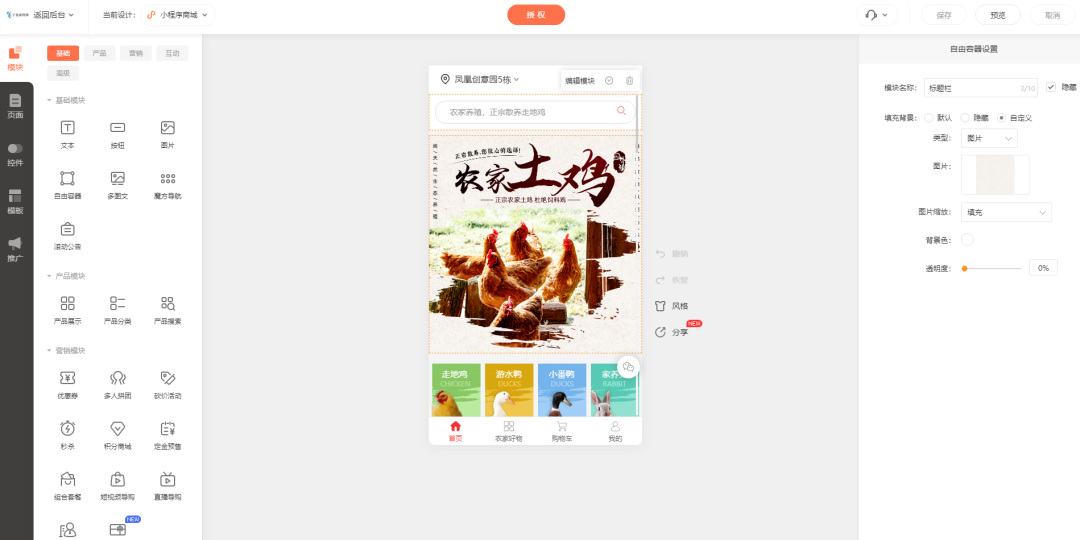
农场养殖农产品商城小程序搭建
鸡鸭羊牛鱼养殖用户不少,其规模也有大有小,尤其对一些生态养殖企业,其产品需求度更高,同时他们也有实际的销售需求。 由于具备较为稳定的货源,因此大规模多规格销售属性很足。 通过【雨科】平台搭建农场养殖商城&…...
大语言模型之十七-QA-LoRA
由于基座模型通常需要海量的数据和算力内存,这一巨大的成本往往只有巨头公司会投入,所以一些优秀的大语言模型要么是大公司开源的,要么是背后有大公司身影公司开源的,如何从优秀的开源基座模型针对特定场景fine-tune模型具有广大的…...
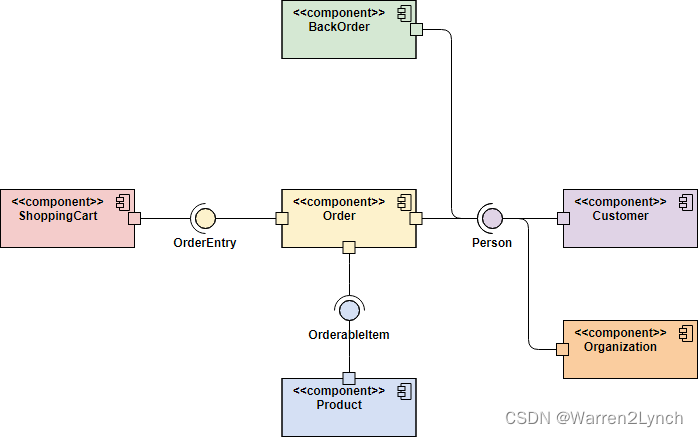
UML组件图综合指南:设计清晰、可维护的软件系统
介绍: UML(Unified Modeling Language)组件图是软件系统设计中的重要工具,用于描绘系统的物理结构和组件之间的关系。在软件工程中,通过创建清晰的组件图,团队能够更好地理解系统的模块化结构和组织关系&a…...
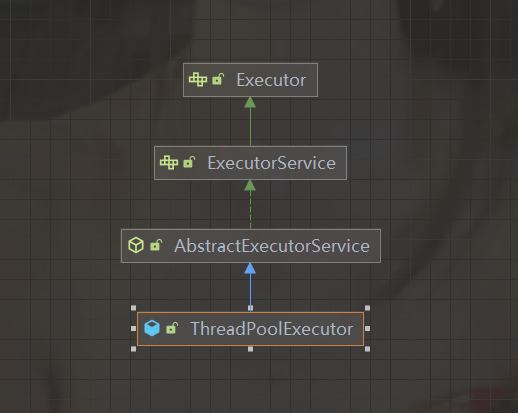
深入浅出ThreadPoolExecutor(一)
文章目录 线程池简诉ThreadPoolExecutor详解ThreadPoolExecutor参数详解创建线程池的工具类Executors 线程池简诉 针对各种池子,比如 连接池:用于管理和重复使用数据库连接,避免频繁创建和销毁数据库连接带来的性能开销。对象池:用于管理和重复使用对象…...
)
告别龟速采样!用DDIM加速你的扩散模型推理(附PyTorch代码)
加速扩散模型推理:DDIM核心原理与实战优化指南 在图像生成领域,扩散模型以其卓越的质量表现迅速成为研究热点,但传统DDPM(Denoising Diffusion Probabilistic Models)的致命缺陷在于其缓慢的采样速度——生成一张图片往…...

终极macOS清理神器:Pearcleaner 3步彻底卸载应用不留痕迹
终极macOS清理神器:Pearcleaner 3步彻底卸载应用不留痕迹 【免费下载链接】Pearcleaner A free, source-available and fair-code licensed mac app cleaner 项目地址: https://gitcode.com/gh_mirrors/pe/Pearcleaner 你是否曾将macOS应用拖入废纸篓后&…...

GARbro:跨平台视觉小说游戏资源解析与提取工具
GARbro:跨平台视觉小说游戏资源解析与提取工具 【免费下载链接】GARbro Visual Novels resource browser 项目地址: https://gitcode.com/gh_mirrors/ga/GARbro GARbro是一款专门用于解析和提取视觉小说游戏资源文件的跨平台开源工具,支持数百种游…...

攻克R与Python的壁垒:Giotto空间转录组分析环境一站式搭建指南
1. 为什么你的Giotto安装总是失败? 每次看到空间转录组数据就手痒想用Giotto分析,结果安装环节就被劝退?这可能是大多数生物信息学新手都会遇到的尴尬。作为一个在生信领域摸爬滚打多年的"环境配置工程师",我太理解这种…...

从零构建团队技能仓库:结构化知识管理与VuePress实践
1. 项目概述:一个技能仓库的诞生与价值 最近在整理团队内部的技术资产时,我一直在思考一个问题:如何让那些散落在个人笔记、项目代码片段、会议纪要里的“隐性知识”和“最佳实践”沉淀下来,变成团队可复用、可传承的“显性资产”…...

量化交易强化学习环境TradingGym:从Gym接口到实战策略训练
1. 项目概述:一个为量化交易策略量身定制的强化学习训练场如果你正在尝试将强化学习(Reinforcement Learning, RL)应用到股票、期货或加密货币的量化交易中,大概率会遇到一个共同的困境:环境太难搭了。市面上的回测框架…...

Docker Compose编排微服务
Docker Compose编排微服务 引言 Docker Compose是Docker官方提供的容器编排工具,用于定义和运行多容器Docker应用。通过Compose,可以使用YAML文件定义服务、网络、数据卷等资源,然后通过简单的命令启动和停止整个应用。Docker Compose特别适合…...

从零构建Next.js全栈应用:实战解析服务端渲染与API路由
1. 项目概述与核心价值最近在社区里看到不少朋友在讨论一个叫“panaverse/learn-nextjs”的项目,作为一个在Web开发领域摸爬滚打了十多年的老码农,我立刻来了兴趣。这个项目名直译过来就是“Panaverse的Next.js学习项目”,听起来像是一个学习…...
)
告别闪烁屏!瑞芯微RK3399开发板Debian系统烧写保姆级教程(含DriverAssistant v5.1.1 + AndroidTool v2.69)
RK3399开发板Debian系统烧写实战:从屏幕闪烁到完美显示的终极解决方案 当你在RK3399开发板上成功烧写Debian系统后,最期待的莫过于看到系统稳定运行的画面。然而,不少开发者却遭遇了屏幕闪烁的困扰——这个问题看似简单,背后却隐藏…...

Node.js后端服务快速集成Taotoken,为应用注入大模型能力
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Node.js后端服务快速集成Taotoken,为应用注入大模型能力 为Node.js后端服务添加大模型能力,可以显著提升应…...