rviz中显示的点云与网格垂直,将保存的pcd文件转为点云在rviz中显示,并使用octomap_server将点云地图转化为八叉树地图和占据栅格地图
文章目录
- 问题:点云与网格垂直
- 背景
- 解决方法:对点云坐标做变换,绕x轴旋转90度,将z轴指向上方
- 将pcd转成点云,在RVIZ中显示点云图
- 创建launch
- rviz显示
问题:点云与网格垂直
用lego-loam建图时用rosbag录制相关点云的话题,建图结束后用rosbag play将.bag包在rviz中显示,但是由于该话题的点云发布的frame_id=/camera_init,但是rviz中默认的坐标系是base_link,并且camera_init与base_link有旋转关系,因此导致点云在rviz中显示时与rviz网格线呈垂直关系,虽然rviz可以将默认显示的xy平面改成xz平面,让点云显示正常,但是此时不能在水平状态下左右旋转点云地图。
背景
ubuntu18.04+melodic
lego-loam订阅话题/laser_cloud_surround后保存了四个.pcd文件:
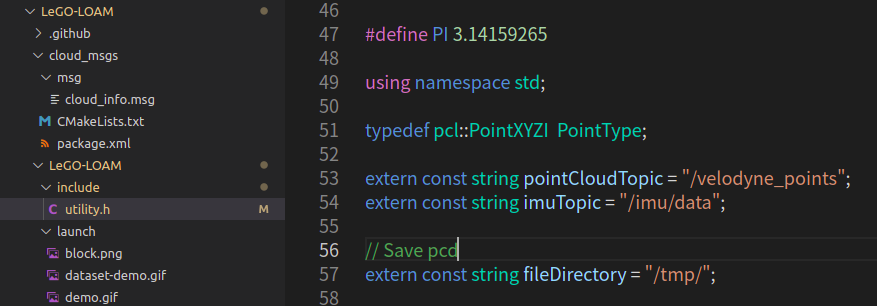
pcd保存的路径在utility.h文件中设置
解决方法:对点云坐标做变换,绕x轴旋转90度,将z轴指向上方
从PCD创建PointCloud2点云,然后再在rviz中显示
将pcd转成点云,在RVIZ中显示点云图
创建pcl_xy2xz.cpp文件:
#include<ros/ros.h>
#include<pcl/point_cloud.h>
#include<pcl_conversions/pcl_conversions.h>
#include<sensor_msgs/PointCloud2.h>
#include<pcl/common/transforms.h>
#include<pcl/io/pcd_io.h>int main (int argc, char **argv)
{ ros::init (argc, argv, "lego_loam"); ros::NodeHandle nh; ros::Publisher pcl_pub = nh.advertise<sensor_msgs::PointCloud2> ("/lego_loam_with_c16/output", 10); //待订阅的点云话题pcl::PointCloud<pcl::PointXYZ> cloud1,cloud2; sensor_msgs::PointCloud2 output; pcl::io::loadPCDFile ("/home/gyl/wheeltec_bag/lego-loam pcl/nosmog1/finalCloud.pcd", cloud1); //自己的pcd路径Eigen::Affine3f transform_2 = Eigen::Affine3f::Identity();//绕x轴旋转一个theta角transform_2.rotate(Eigen::AngleAxisf(1.570795, Eigen::Vector3f::UnitX()));//执行变换//pcl::PointCloud<pcl::PointXYZ>::Ptr pPointCloudOut(new pcl::PointCloud<pcl::PointXYZ>());pcl::transformPointCloud(cloud1, cloud2, transform_2);pcl::toROSMsg(cloud2,output);// 转换成ROS下的数据类型 最终通过topic发布output.header.stamp=ros::Time::now();output.header.frame_id ="/camera_init_xz"; //点云所在的坐标系,frame_idros::Rate loop_rate(1); while (ros::ok()) { pcl_pub.publish(output); ros::spinOnce(); loop_rate.sleep(); } return 0;
}
catkin_make编译,结果报错:
CMakeFiles/urdf01_rviz_node.dir/src/pcl_xy2xz.cpp.o:在函数‘void pcl::createMapping<pcl::PointXYZ>(std::vector<pcl::PCLPointField, std::allocator<pcl::PCLPointField> > const&, std::vector<pcl::detail::FieldMapping, std::allocator<pcl::detail::FieldMapping> >&)’中:
/usr/include/pcl-1.8/pcl/conversions.h:108:对‘pcl::console::print(pcl::console::VERBOSITY_LEVEL, char const*, ...)’未定义的引用
/usr/include/pcl-1.8/pcl/conversions.h:108:对‘pcl::console::print(pcl::console::VERBOSITY_LEVEL, char const*, ...)’未定义的引用
/usr/include/pcl-1.8/pcl/conversions.h:108:对‘pcl::console::print(pcl::console::VERBOSITY_LEVEL, char const*, ...)’未定义的引用
CMakeFiles/urdf01_rviz_node.dir/src/pcl_xy2xz.cpp.o:在函数‘main’中:
/usr/include/pcl-1.8/pcl/io/pcd_io.h:56:对‘vtable for pcl::PCDReader’未定义的引用
/usr/include/pcl-1.8/pcl/io/pcd_io.h:208:对‘pcl::PCDReader::read(std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&, pcl::PCLPointCloud2&, Eigen::Matrix<float, 4, 1, 0, 4, 1>&, Eigen::Quaternion<float, 0>&, int&, int)’未定义的引用collect2: error: ld returned 1 exit status
urdf01_rviz/CMakeFiles/urdf01_rviz_node.dir/build.make:127: recipe for target '/home/gyl/hello_w/devel/lib/urdf01_rviz/urdf01_rviz_node' failed
make[2]: *** [/home/gyl/hello_w/devel/lib/urdf01_rviz/urdf01_rviz_node] Error 1
CMakeFiles/Makefile2:5439: recipe for target 'urdf01_rviz/CMakeFiles/urdf01_rviz_node.dir/all' failed
make[1]: *** [urdf01_rviz/CMakeFiles/urdf01_rviz_node.dir/all] Error 2
Makefile:140: recipe for target 'all' failed
make: *** [all] Error 2
Invoking "make -j8 -l8" failed

原因就是CMakeLists.txt中没有配置好相关信息:
......find_package(catkin REQUIRED COMPONENTSpcl_rospcl_conversions
)
find_package(PCL REQUIRED QUIET)catkin_package(DEPENDS PCL
)include_directories(${catkin_INCLUDE_DIRS}${PCL_INCLUDE_DIRS}
)link_directories(include${PCL_LIBRARY_DIRS}
)add_executable(自己的项目名称 src/pcl_xy2xz.cpp)
target_link_libraries(自己的项目名称 ${catkin_LIBRARIES} ${PCL_LIBRARIES})
重新catkin_make编译就成功了。
创建launch
<launch><!-- 运行创建的pcl_xy2xz.cpp文件 --><node pkg="urdf01_rviz" type="pcl_xy2xz" name="pcl_xy2xz" output="screen" respawn="false"/><!-- 使用octomap_server将点云地图转化为八叉树地图和占据栅格地图 --><node pkg="octomap_server" type="octomap_server_node" name="octomap_server"><!-- resolution in meters per pixel --><param name="resolution" value="0.1" /><!-- name of the fixed frame, needs to be "/map" for SLAM --><param name="frame_id" type="string" value="/camera_init_xz" /><!-- max range / depth resolution of the kinect in meter --><param name="sensor_model/max_range" value="50.0" /><param name="latch" value="true" /><!-- max/min height for occupancy map, should be in meters --><param name="pointcloud_max_z" value="1000" /><param name="pointcloud_min_z" value="-1000" /><param name="ground_filter_angle" value="3.14" /><!-- topic from where pointcloud2 messages are subscribed --><remap from="cloud_in" to="/lego_loam_with_c16/output" /></node><!-- 启动rviz --><node pkg="rviz" type="rviz" name="rviz" /></launch>rviz显示
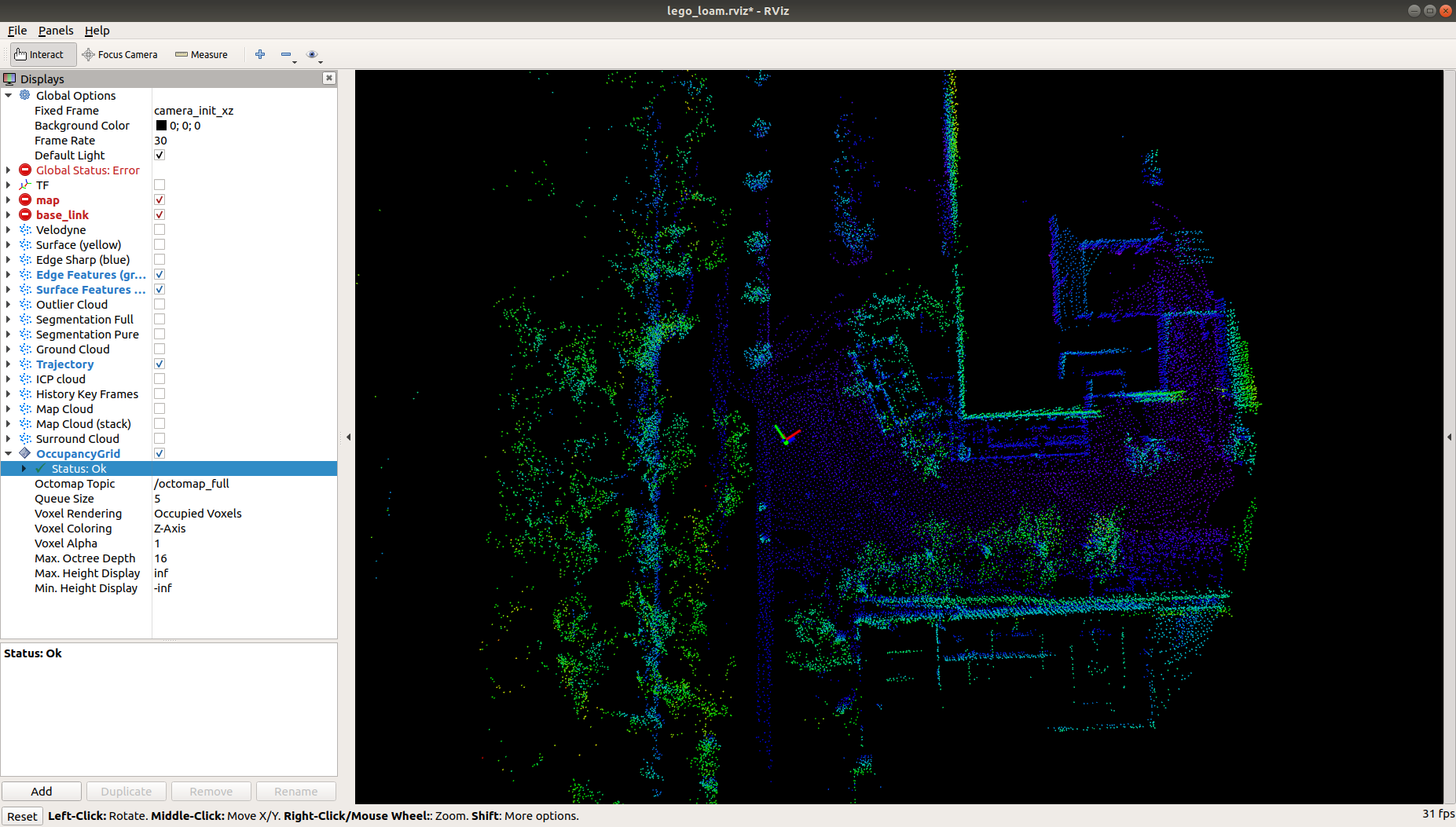
点击add 按钮添加 “PointCloud2模块”
设置topic为 “/lego_loam_with_c16/output”
设置FixedFram为 “camera_init_xz”
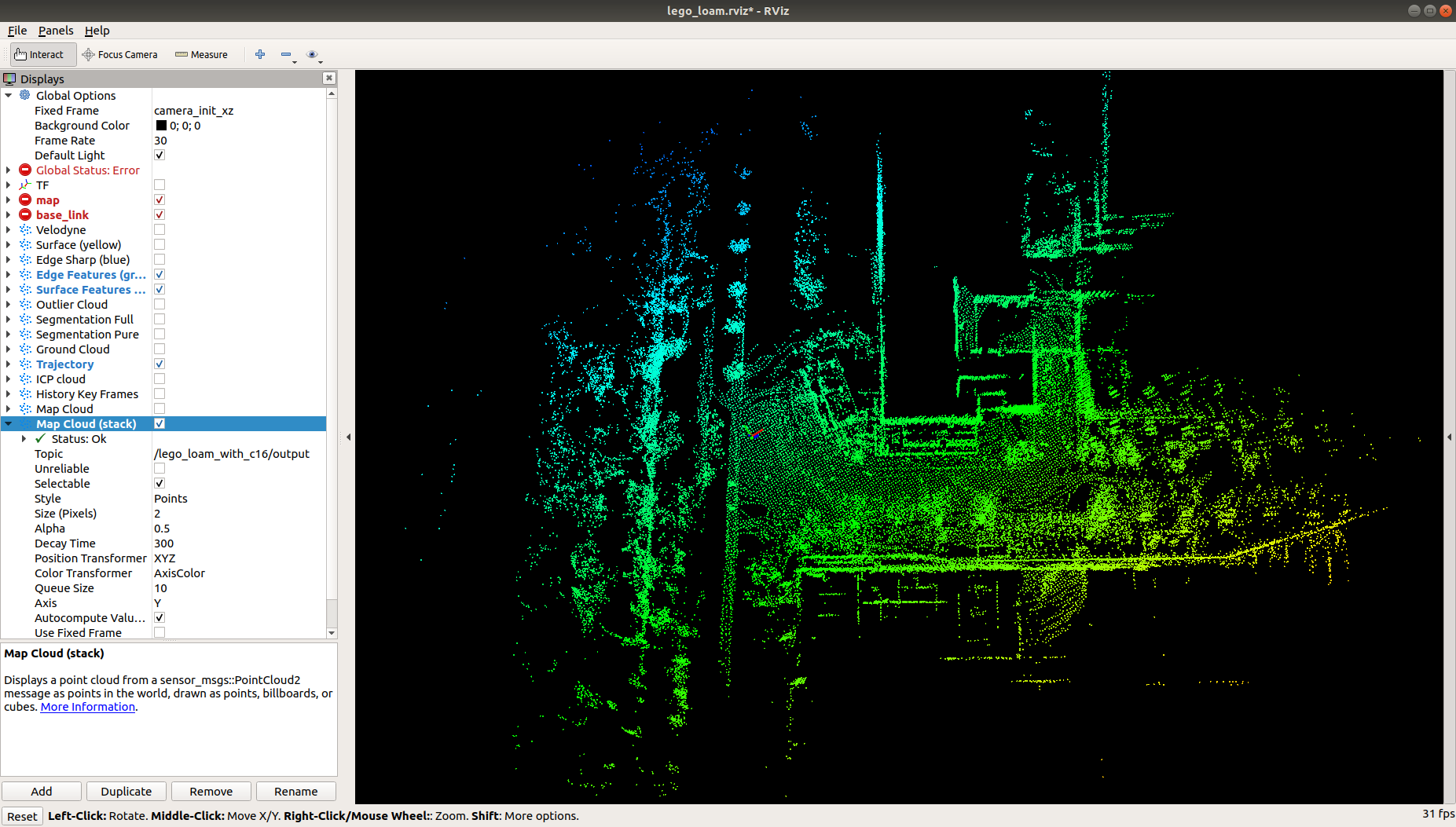
点云显示:
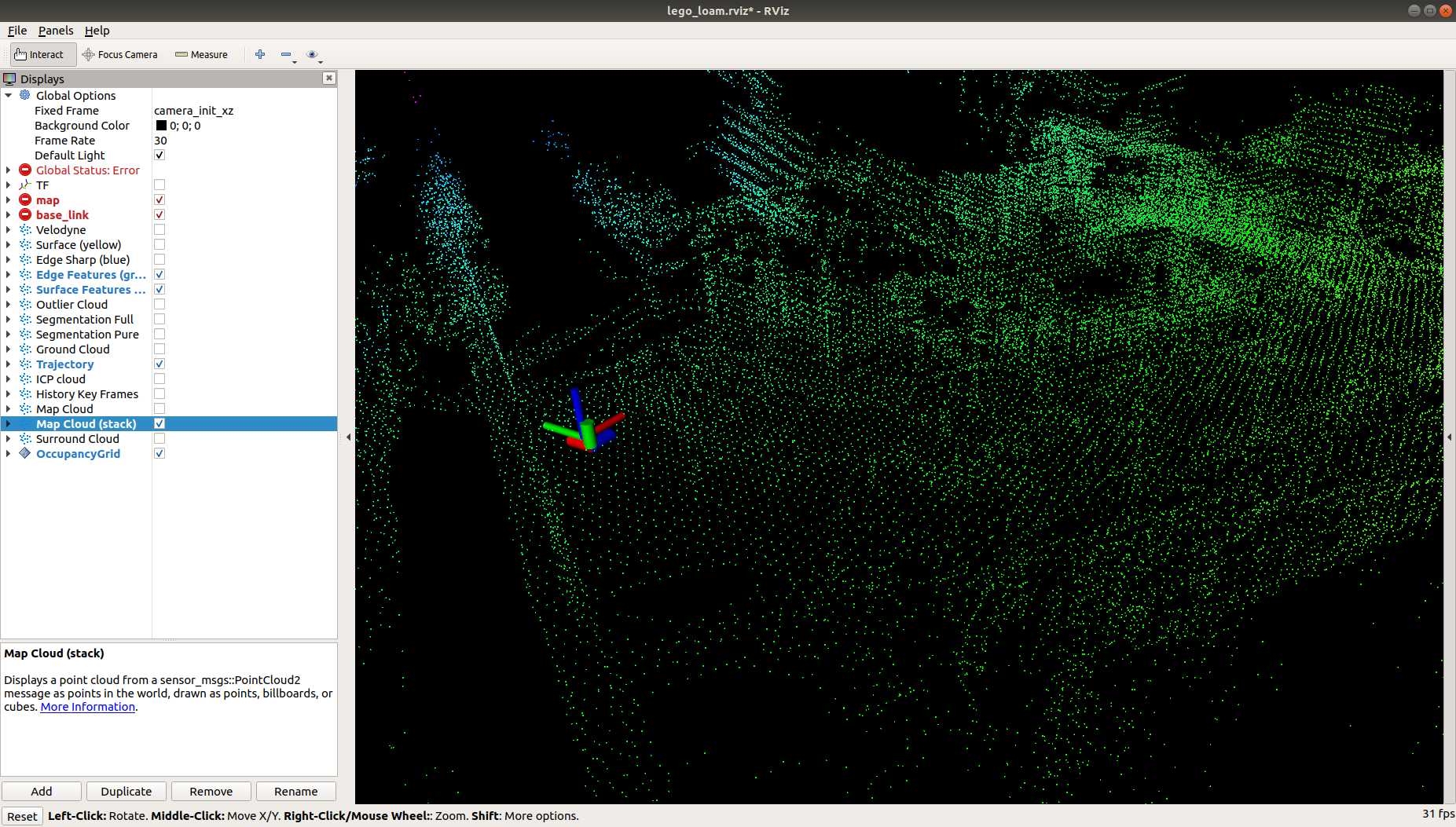
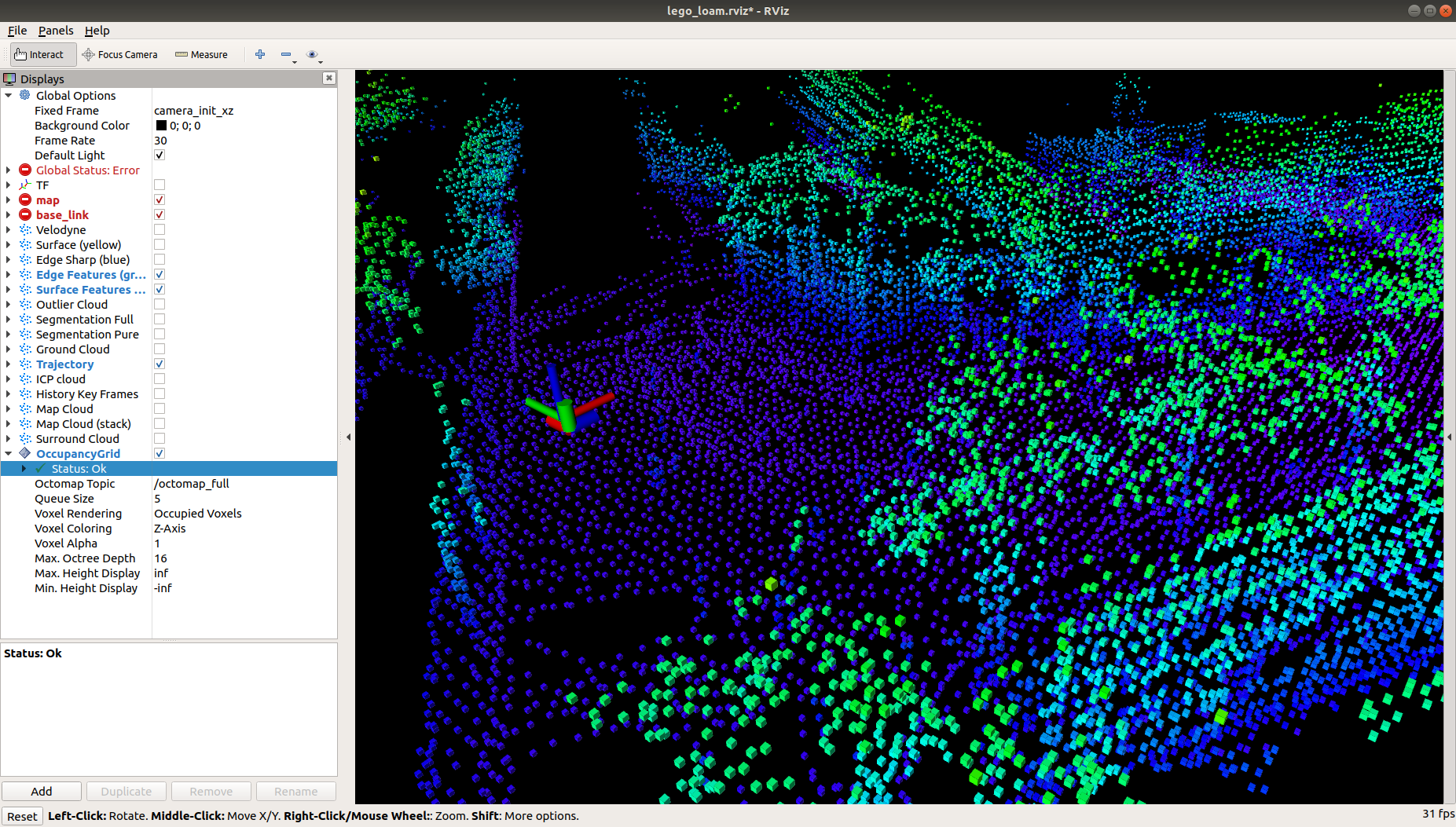
八叉树地图显示:
参考博客:
- 【激光SLAM】Lego_loam使用教程
- Octomap 在ROS环境下实时显示
- 使用octomap_server将点云地图转化为八叉树地图和占据栅格地图
相关文章:
rviz中显示的点云与网格垂直,将保存的pcd文件转为点云在rviz中显示,并使用octomap_server将点云地图转化为八叉树地图和占据栅格地图
文章目录 问题:点云与网格垂直背景解决方法:对点云坐标做变换,绕x轴旋转90度,将z轴指向上方将pcd转成点云,在RVIZ中显示点云图创建launch rviz显示 问题:点云与网格垂直 用lego-loam建图时用rosbag录制相关…...
个人博客系统的总结
个人博客系统 1、项目背景: 个人博客系统的兴起和发展是与信息技术和互联网的迅猛发展密切相关的。随着互联网的普及和数字化时代的到来,越来越多的人开始使用互联网平台来表达自己的观点、分享知识和展示个人创作。个人博客系统作为一种在线的个人信息…...
小程序之实例会议OA的首页 (3)
⭐⭐ 小程序专栏:小程序开发专栏 ⭐⭐ 个人主页:个人主页 目录 编辑 一.前言 二.flex弹性布局 flex属性 2.1 display: flex 弹性布局属性 2.2 flex-direction属性 2.3 flex-wrap属性 2.4 flex-flow属性 2.5 justify-content属性 三.首页轮播…...

Gson 问题汇总
Gson 自定义TypeAdapter 使用Gsonspringboot中指定Gson为默认消息转换器自定义Gson实例解决方法设定日期类型的格式处理特殊格式数据解析serialVersionUID字段报错int类型,转换后变成了double类型 使用Gson gson是google推出的json解析框架,相较于其他json解析框架,它速度更快…...
css-水滴登录页
效果图: html <!DOCTYPE html> <html><head><meta charset"utf-8"><title></title><link type"text/css" rel"stylesheet" href"login.css" /></head><body><…...

Spark Streaming 整合 Flume
本文代码链接: https://download.csdn.net/download/shangjg03/88442192 1.简介 Apache Flume 是一个分布式,高可用的数据收集系统,可以从不同的数据源收集数据,经过聚合后发送到分布式计算框架或者存储系统中。Spark Straming 提供了以下两种方式用于 Flume 的整合。 2.推…...

如何写出优雅的业务代码
接口统一响应对象返回 BaseResponse通用响应对象 package com.leesin.project.common;存放在common包下 有三个主要的字段: code:一个整数,通常用于表示响应的状态码,例如200表示成功,404表示未找到资源等。data&a…...

办鹿uniapp小程序(一)
一、项目初始化 1. appid 》 公司给你 wxc82730a0fc15e28a 2. 开发者身份 》 公司给你添加 小程序官网:小程序 管理》成员管理》项目成员 1、 uniapp ui组件 (uView) 如果采用npm安装方式在 小程序端不生效 1.1 采用插件的形式安装…...

#力扣:1684. 统计一致字符串的数目@FDDLC
1684. 统计一致字符串的数目 - 力扣(LeetCode) 一、Java class Solution {public int countConsistentStrings(String allowed, String[] words) {boolean[] isAllowed new boolean[26];for(int i 0; i < allowed.length(); i) isAllowed[allowed…...
谈谈 Redis 主从复制模式
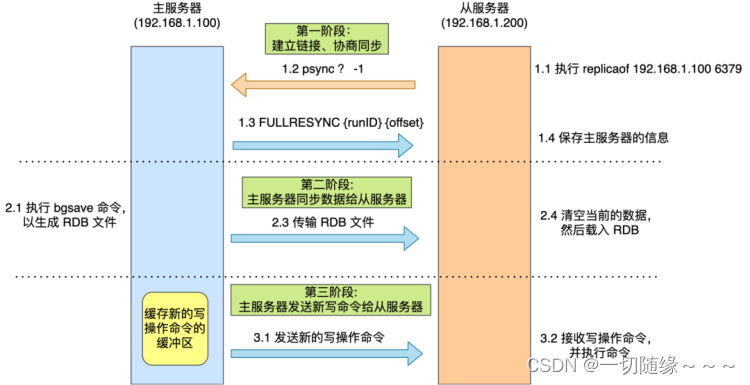
谈谈 Redis 主从复制模式 第一次主从节点同步是全量复制 接下来,我在具体介绍每一个阶段都做了什么。 第一阶段:建立链接、协商同步 执行了 replicaof 命令后,从服务器就会给主服务器发送 psync 命令,表示要进行数据同步。 psync…...
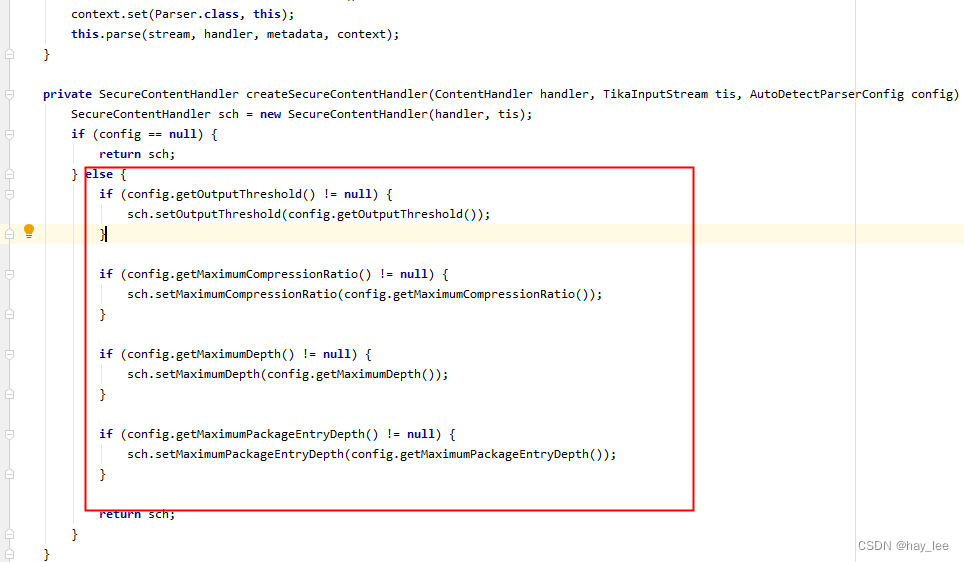
tika解压遇到压缩炸弹如何继续解压
1.问题 项目中要对10层压缩的zip、7z等文件用tika解压遇到错误:tika zip bomb detected 也就是说tika认为这是个压缩炸弹。 “压缩炸弹”是一个压缩包文件的木马程序,通常只有几百KB,解压后会变成上百MB或者上GB庞然大物。把你本地磁盘占满…...

【OJ比赛日历】快周末了,不来一场比赛吗? #10.21-10.27 #11场
CompHub[1] 实时聚合多平台的数据类(Kaggle、天池…)和OJ类(Leetcode、牛客…)比赛。本账号会推送最新的比赛消息,欢迎关注! 以下信息仅供参考,以比赛官网为准 目录 2023-10-21(周六) #2场比赛2023-10-22…...

如何远程通过内网穿透实现微信公众号在本地的完整调试
文章目录 前言1. 配置本地服务器2. 内网穿透2.1 下载安装cpolar内网穿透2.2 创建隧道 3. 测试公网访问4. 固定域名4.1 保留一个二级子域名4.2 配置二级子域名 5. 使用固定二级子域名进行微信开发 前言 在微信公众号开发中,微信要求开发者需要拥有自己的服务器资源来…...
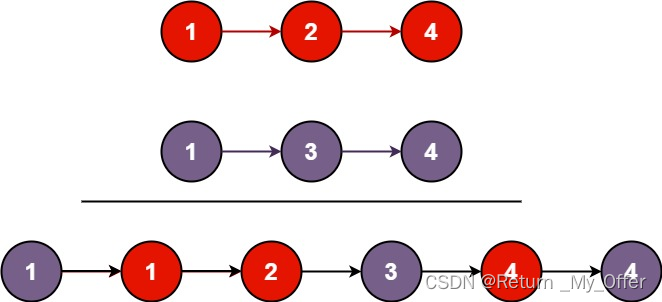
【LeetCode刷题(数据结构与算法)】:合并两个有序链表
将两个升序链表合并为一个新的 升序 链表并返回。新链表是通过拼接给定的两个链表的所有节点组成的 **思路:定义一个头尾指针置为NULL while循环依次比较两个链表的值的大小 遍历链表 比较完数值大小过后连接到tail的尾部 然后各自的链表的节点的next指针指向下一…...
(scala 编程))
spark DStream从不同数据源采集数据(RDD 队列、文件、diy 采集器、kafka)(scala 编程)
目录 1. RDD队列 2 textFileStream 3 DIY采集器 4 kafka数据源【重点】 1. RDD队列 a、使用场景:测试 b、实现方式: 通过ssc.queueStream(queueOfRDDs)创建DStream,每一个推送这个队列的RDD,都会作为一个DStream处理 val sparkco…...

【三:Mock服务的使用】
目录 1、工具包2、mock的demo1、get请求2、post请求3、带cookies的请求4、带请求头的请求5、请求重定向 1、工具包 1、:服务包的下载 moco-runner-0.11.0-standalone.jar 下载 2、:运行命令java -jar ./moco-runner-0.11.0-standalone.jar http -p 888…...
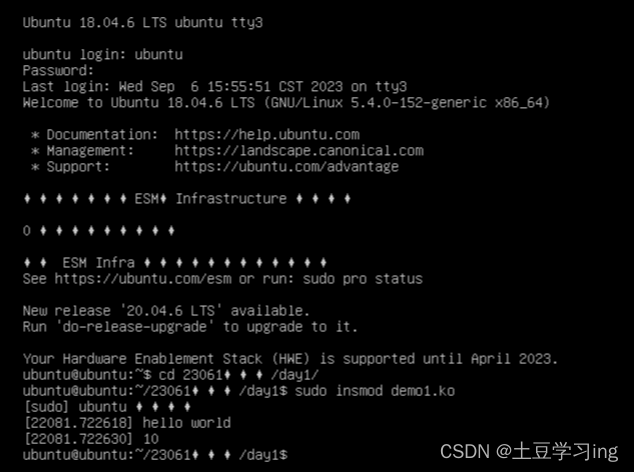
驱动:驱动相关概念,内核模块编程,内核消息打印printk函数的使用
一、驱动相关概念 1.操作系统的功能 向下管理硬件,向上提供接口 操作系统向上提供的接口类型: 内存管理:内存申请(malloc) 内存释放(free)等 文件管理: 通过文件系统格式对文件ext2…...
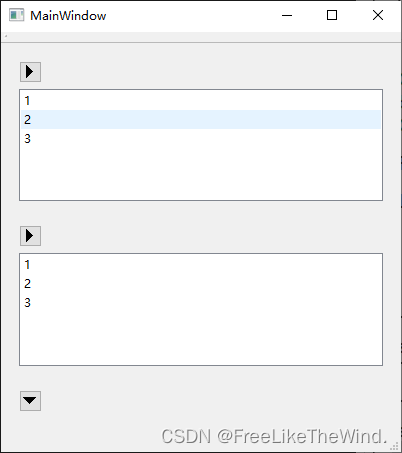
【Qt控件之QListWidget】介绍及使用,利用QListWidget、QToolButton、和布局控件实现抽屉式组合控件
概述 QListWidget类提供了基于项目的列表小部件。 QListWidget是一个方便的类,类似于QListView提供的列表视图,但使用经典的基于项目的接口来添加和删除项目。QListWidget使用内部模型来管理列表中的每个QListWidgetItem。 对于更灵活的列表视图小部件…...

【Java基础面试二十四】、String类有哪些方法?
文章底部有个人公众号:热爱技术的小郑。主要分享开发知识、学习资料、毕业设计指导等。有兴趣的可以关注一下。为何分享? 踩过的坑没必要让别人在再踩,自己复盘也能加深记忆。利己利人、所谓双赢。 面试官:String类有哪些方法&…...
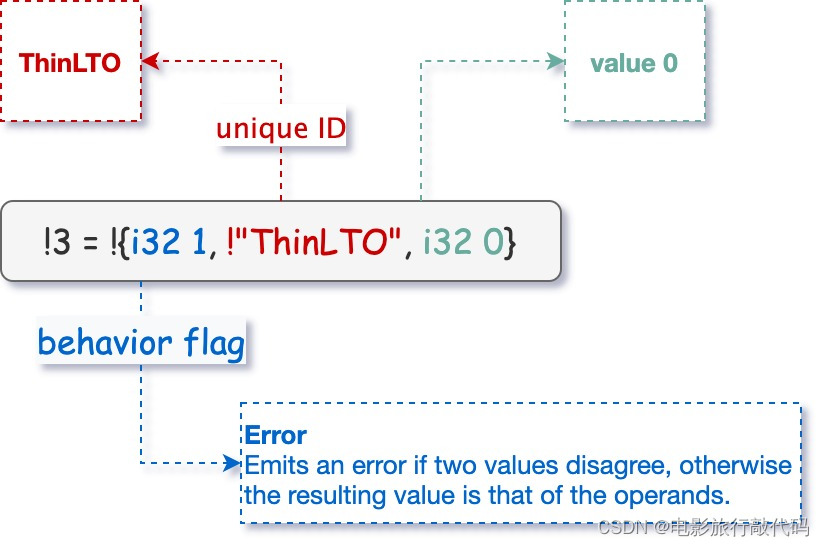
[DRAFT] LLVM ThinLTO原理分析
我们在《论文阅读:ThinLTO: Scalable and Incremental LTO》中介绍了ThinLTO论文的主要思想,这里我们介绍下LLVM ThinLTO是如何实现的。本文主要分为如下几个部分: LLVM ThinLTO Object 含有哪些内容?LLVM ThinLTO 是如何做优化的…...

阿里云购买域名后解析与申请ssl证书并部署到宝塔
1.购买域名 2.解析域名 我们域名可以拆解为二级域名和三级域名等等 首先进入域名管理 https://dc.console.aliyun.com/next/index?spm5176.12818093_47.overview_recent.2.1c0716d0NpJNj1#/domain-list/all然后我们就拿到了二级域名,但是这个时候需要把二级域名和一…...

javaweb大学生校园跑腿服务系统的设计与实现沙箱支付
目录同行可拿货,招校园代理 ,本人源头供货商沙箱支付功能概述核心功能模块技术实现要点测试注意事项项目技术支持源码获取详细视频演示 :文章底部获取博主联系方式!同行可合作同行可拿货,招校园代理 ,本人源头供货商 沙箱支付功能概述 在JavaWeb校园跑…...

SEER‘S EYE模型学术应用:LaTeX论文写作辅助与公式校对
SEERS EYE模型学术应用:LaTeX论文写作辅助与公式校对 写论文,尤其是理工科的论文,最头疼的是什么?十有八九会提到LaTeX。从搭建文档结构、处理复杂的数学公式,到确保格式规范、检查符号一致性,每一步都可能…...

C++-string学习笔记
string学习笔记1、关键语法:1.1内联函数1.2静态成员常量1.3初始化列表1.4析构方式1.5operator1.5.1迭代器1.6strstr**1.6strcmp**string 头文件:#pragma once #include<iostream> #include<assert.h> #include<string.h> using namesp…...

良心推荐!阿贝云免费云服务器,新手小白也能轻松上手
最近在折腾个人网站,想找个免费的云服务器练练手,试了好几家都不太满意。后来朋友推荐了阿贝云,体验下来感觉真的不错。 首先,阿贝云的免费云服务器配置很实在:1核CPU、1GB内存、5M带宽,还带独立公网IP。对…...

3步解锁知识自由:ScienceDecrypting永久破解文档限制
3步解锁知识自由:ScienceDecrypting永久破解文档限制 【免费下载链接】ScienceDecrypting 破解CAJViewer带有效期的文档,支持破解科学文库、标准全文数据库下载的文档。无损破解,保留文字和目录,解除有效期限制。 项目地址: htt…...

2026年亲测有效:合肥无人机培训案例分享
行业痛点分析随着无人机技术的飞速发展,其在各个领域的应用越来越广泛。然而,无人机行业也面临着一些核心技术挑战。首先,无人机的操作和维护需要专业的知识和技能,而市场上缺乏足够的专业人才。根据行业数据显示,目前…...

开源项目 Homelab 使用教程
开源项目 Homelab 使用教程 项目介绍 Homelab 是一个开源项目,旨在帮助用户构建和管理自己的家庭实验室。该项目提供了一套完整的工具和配置,使用户能够轻松地部署和管理各种服务和应用。Homelab 项目由 khuedoan 开发,基于 Kubernetes 和其他…...

React自定义Hook开发:解锁逻辑复用的终极指南
React自定义Hook开发:解锁逻辑复用的终极指南 【免费下载链接】react-fundamentals Material for my React Fundamentals Workshop 项目地址: https://gitcode.com/gh_mirrors/re/react-fundamentals React自定义Hook是提升组件逻辑复用能力的核心技术&#…...

如何高效实现金融核心系统客户证件影像预览?kkFileView完整解决方案
如何高效实现金融核心系统客户证件影像预览?kkFileView完整解决方案 【免费下载链接】kkFileView Universal File Online Preview Project based on Spring-Boot 项目地址: https://gitcode.com/GitHub_Trending/kk/kkFileView 在金融行业日常运营中…...