【torch高级】一种新型的概率学语言pyro(02/2)
前文链接:【torch高级】一种新型的概率学语言pyro(01/2)
七、Pyro 中的推理
7.1 背景:变分推理
引言中的每项计算(后验分布、边际似然和后验预测分布)都需要执行积分,而这通常是不可能的或计算上难以处理的。
虽然 Pyro 支持许多不同的精确和近似推理算法,但支持最好的是变分推理,它提供了一个统一的方案来查找 并计算一个易于处理的近似值
到真实的、未知的后验
通过将棘手的积分转换为函数的优化p和q。下图从概念上描述了这个过程,而SVI 教程中提供了更全面的数学介绍。
大多数概率分布(下图中的浅色椭圆),尤其是那些对应于贝叶斯后验分布的概率分布,都太复杂而无法直接表示,因此我们必须定义一个更小的子空间,由实值参数索引,分布的
, 通过构造保证可以轻松从中采样(下图中的黑圈),但可能不包括真实的后验分布
(下图中的红星)。
变分推理通过搜索变分分布的空间来近似真实后验,根据某种距离或散度的度量(下图中的黑色箭头)找到与真实后验最相似的一个(下图中的黄色星星) 。
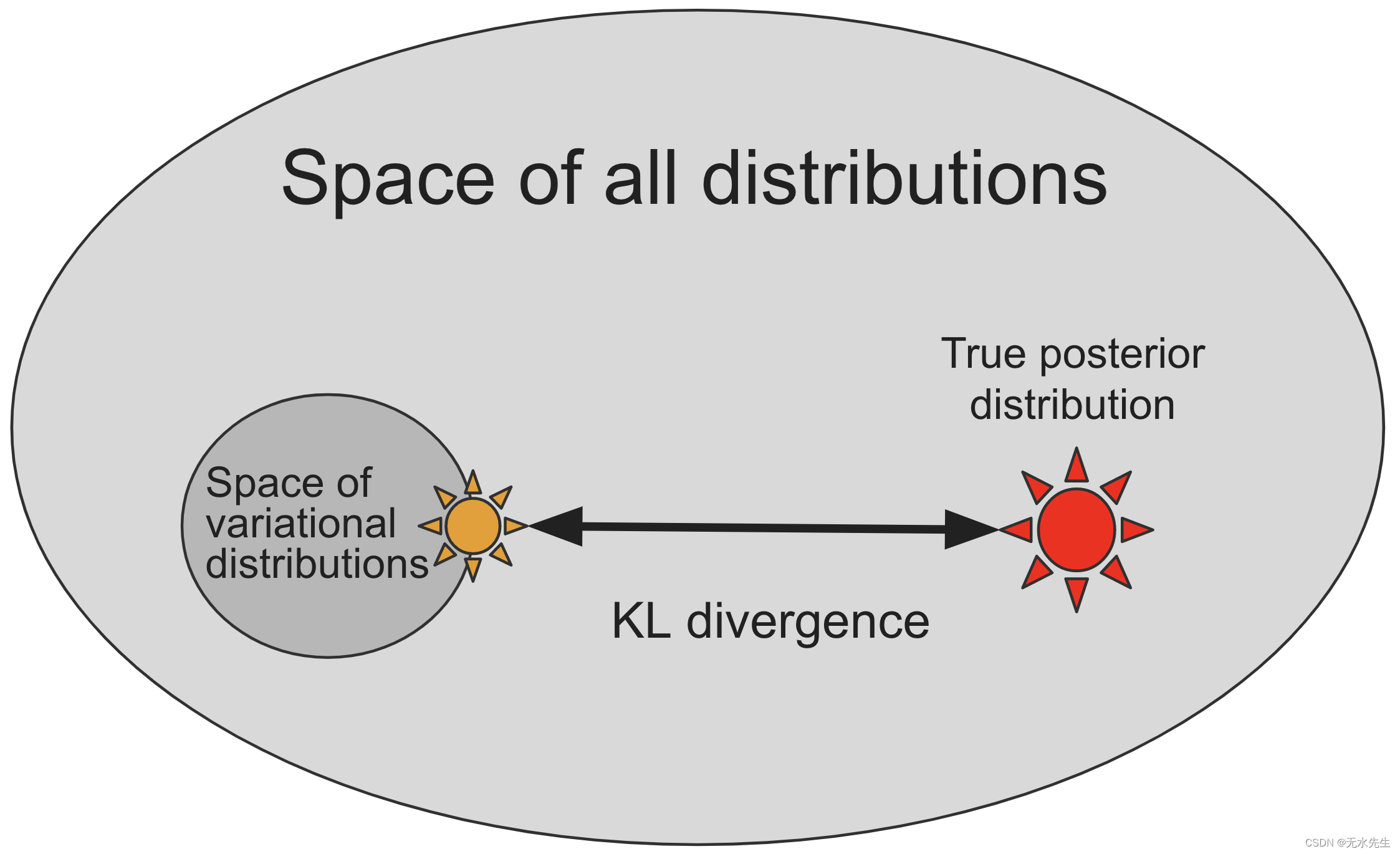
然而,有许多不同的方法来测量概率分布之间的距离或散度。我们应该选择哪一个呢?如图所示,理论上有吸引力的选择是 Kullback-Leibler 散度 ,但是直接计算它需要提前知道真实的后验,这会达不到目的。
更重要的是,我们有兴趣优化这种散度,这可能听起来更难,但实际上可以使用贝叶斯定理重写定义 作为一个不依赖于的棘手常数之间的差异
以及一个易于处理的术语,称为证据下界 (ELBO),定义如下。因此,最大化这个易于处理的项将产生与最小化原始 KL 散度相同的解决方案。
7.2 背景:“引导”程序作为灵活的近似后验
在变分推理中,我们引入参数化分布 近似真实后验,其中
称为变分参数。在许多文献中,这种分布被称为变分分布,在 Pyro 的上下文中,它被称为指南(一个音节而不是九个音节!)。
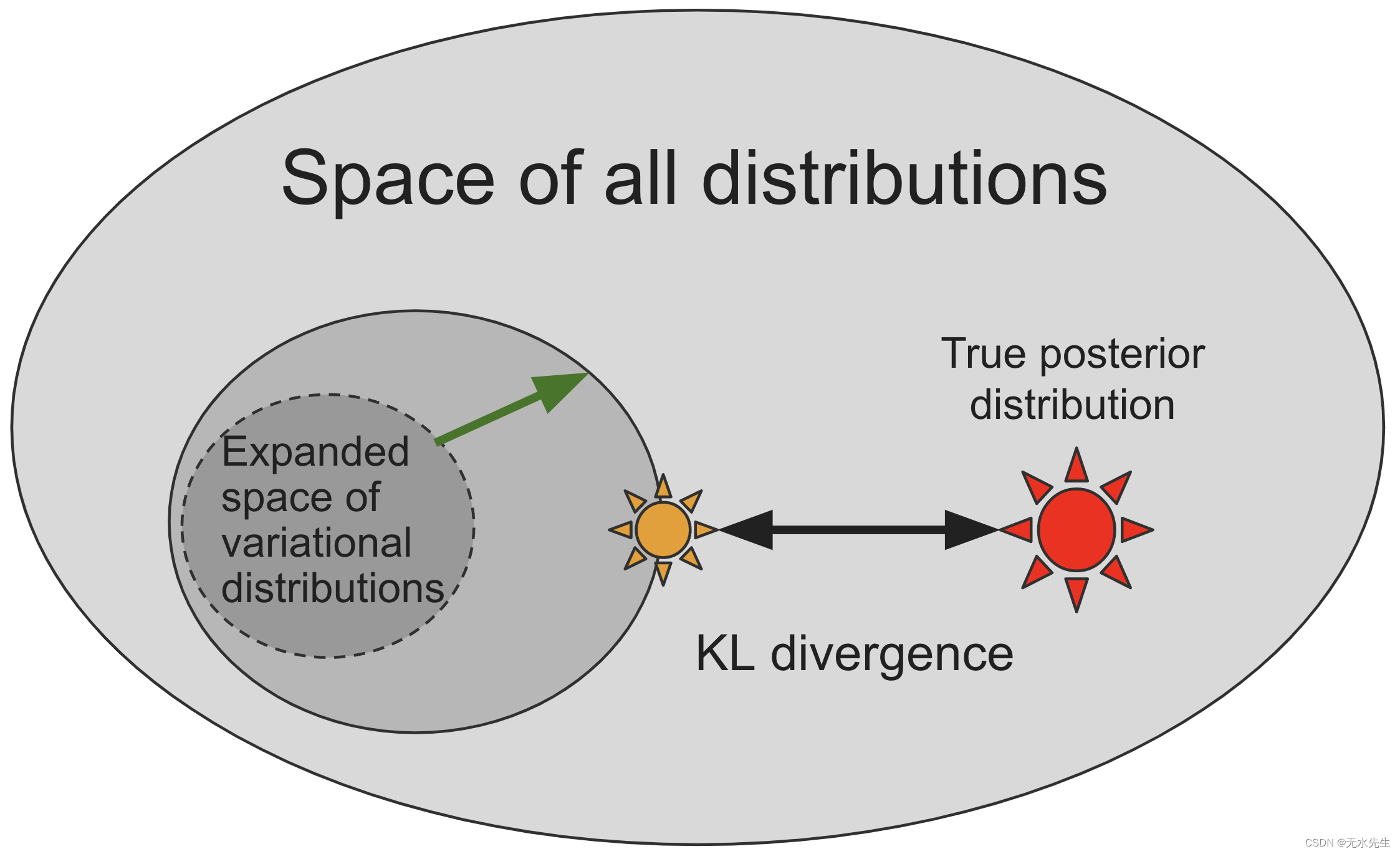
就像模型一样,该指南被编码为guide()包含pyro.sample和pyro.param语句的 Python 程序。它不包含观察到的数据,因为指南需要是适当的标准化分布,以便易于从中采样。请注意,Pyro 强制执行这一点model(),并且guide()应该采用相同的参数。允许指南是任意的 Pyro 程序开启了编写指南系列的可能性,这些指南系列捕获更多真实后验的特定问题结构,仅在有用的方向上扩展搜索空间,如下图所示。
变分推理的数学对指南施加了哪些限制?由于该指南是后验的近似 ,指南需要提供模型中所有潜在随机变量的有效联合概率密度。回想一下,当使用原始语句在 Pyro 中指定随机变量时,
pyro.sample()第一个参数表示随机变量的名称。这些名称将用于对齐模型和指南中的随机变量。非常明确地说,如果模型包含随机变量z_1
def model():pyro.sample("z_1", ...)
那么指南需要有一个匹配的sample声明
def guide():pyro.sample("z_1", ...)
两种情况中使用的分布可以不同,但名称必须一对一排列。
尽管它提供了灵活性,但手动编写指南可能会很困难且乏味,尤其是对于新用户而言。只要有可能,我们建议使用autoguides或配方,从pyro.infer.autoguide中随 Pyro 附带的模型自动生成通用指南系列。下一节将演示这两种方法。
7.3 示例:Pyro 中贝叶斯线性回归的平均场变分近似
对于贝叶斯线性回归的运行示例,我们将使用一个指南,将模型中未观察到的参数的分布建模为具有对角协方差的高斯分布,即假设潜在变量之间不存在相关性(这是一个很强的假设,因为我们应该看到)。这被称为平均场近似,这是一个借用自物理学的术语,这种近似最初是在物理学中发明的。
为了完整性,我们首先手工写出这种形式的引导程序。
[51]:
def custom_guide(is_cont_africa, ruggedness, log_gdp=None):a_loc = pyro.param('a_loc', lambda: torch.tensor(0.))a_scale = pyro.param('a_scale', lambda: torch.tensor(1.),constraint=constraints.positive)sigma_loc = pyro.param('sigma_loc', lambda: torch.tensor(1.),constraint=constraints.positive)weights_loc = pyro.param('weights_loc', lambda: torch.randn(3))weights_scale = pyro.param('weights_scale', lambda: torch.ones(3),constraint=constraints.positive)a = pyro.sample("a", dist.Normal(a_loc, a_scale))b_a = pyro.sample("bA", dist.Normal(weights_loc[0], weights_scale[0]))b_r = pyro.sample("bR", dist.Normal(weights_loc[1], weights_scale[1]))b_ar = pyro.sample("bAR", dist.Normal(weights_loc[2], weights_scale[2]))sigma = pyro.sample("sigma", dist.Normal(sigma_loc, torch.tensor(0.05)))return {"a": a, "b_a": b_a, "b_r": b_r, "b_ar": b_ar, "sigma": sigma}
我们可以使用pyro.render_model来可视化custom_guide,证明随机变量确实彼此独立,正如它们之间缺乏边缘所表明的那样。
[52]:
pyro.render_model(custom_guide, model_args=(is_cont_africa, ruggedness, log_gdp), render_params=True)
[52]:
Pyro 还包含大量“自动指南”,可根据给定模型自动生成指南程序。就像我们的手写指南一样,所有pyro.autoguide.AutoGuide实例(它们本身只是采用与模型相同的参数的函数)都返回它们包含的每个pyro.sample站点的值字典。
最简单的自动指南类是AutoNormal,它会在一行代码中自动生成一个指南,相当于我们上面手动编写的代码:
[53]:
auto_guide = pyro.infer.autoguide.AutoNormal(model)
然而,该指南本身并未完全指定推理算法:它仅描述了由参数(上图中的黑圈)索引的可能近似后验分布的搜索空间以及由初始参数值确定的该空间中的初始点。然后,我们必须通过解决参数的优化问题(上图中的黄色星星)来将该初始分布移向真实的后验分布(上图中的红色星星)。制定并解决这个优化问题是接下来两节的主题。
7.4 背景:估计和优化证据下限 (ELBO)
模型的功能并指导
我们将优化的是 ELBO,定义为对指南中样本的期望:
通过假设,我们可以计算期望内的所有概率,并且由于指南假设是我们可以从中采样的参数分布,我们可以计算该数量的蒙特卡罗估计以及模型和引导参数的梯度,
。
通过模型和导向参数优化 ELBO , 通过使用这些梯度估计的随机梯度下降有时称为随机变分推理(SVI);有关 SVI 的详细介绍,请参阅SVI 第 I 部分。
7.5 示例:通过随机变分推理 (SVI) 的贝叶斯回归
Pyro 包含ELBO 估计器的 许多不同实现(在上一节中以数学方式定义),每个估计器通过不同的权衡计算损失和梯度略有不同。 在本教程中,我们将仅使用pyro.infer.Trace_ELBO,这始终是正确且安全的;其他 ELBO 估计器可以为某些模型和指南提供计算或统计优势。
pyro.infer.Trace_ELBO我们将在示例模型中使用 SVI 进行推理,演示 Pyro 如何使用 PyTorch 的随机梯度下降实现来优化我们传递给pyro.infer.SVI的对象的输出,这是一个帮助器类,其step()方法负责计算损失和参数梯度并对参数应用更新和约束。
[54]:
adam = pyro.optim.Adam({"lr": 0.02})
elbo = pyro.infer.Trace_ELBO()
svi = pyro.infer.SVI(model, auto_guide, adam, elbo)
这里的pyro.optim.Adam是PyTorch优化器torch.optim.Adam的一个薄包装器(请参见此处的讨论)。中的优化器pyro.optim用于优化和更新 Pyro 参数存储中的参数值。特别是,您会注意到我们不需要将可学习的参数传递给优化器,因为这是由指导代码确定的,并且在类的幕后SVI自动发生。要采取 ELBO 梯度步骤,我们只需调用 SVI 的步骤方法。我们传递给的 data 参数SVI.step将同时传递给model()和guide()。完整的训练循环如下:
[55]:
%%time
pyro.clear_param_store()# These should be reset each training loop.
auto_guide = pyro.infer.autoguide.AutoNormal(model)
adam = pyro.optim.Adam({"lr": 0.02}) # Consider decreasing learning rate.
elbo = pyro.infer.Trace_ELBO()
svi = pyro.infer.SVI(model, auto_guide, adam, elbo)losses = []
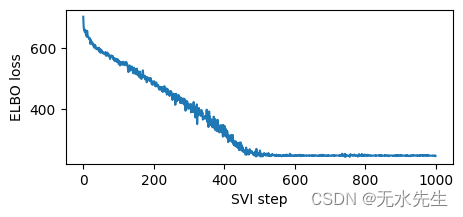
for step in range(1000 if not smoke_test else 2): # Consider running for more steps.loss = svi.step(is_cont_africa, ruggedness, log_gdp)losses.append(loss)if step % 100 == 0:logging.info("Elbo loss: {}".format(loss))plt.figure(figsize=(5, 2))
plt.plot(losses)
plt.xlabel("SVI step")
plt.ylabel("ELBO loss");
埃尔博损失:694.9404826164246 埃尔博损失:524.3822101354599 埃尔博损失:475.66820669174194 埃尔博损失:399.99088364839554 埃尔博损失:315.23274326324463 埃尔博损失:254.76771265268326 埃尔博损失:248.237040579319 埃尔博损失:248.42670530080795 埃尔博损失:248.46450632810593 埃尔博损失:257.41463351249695
CPU时间:用户6.47秒,系统:241微秒,总计:6.47秒挂壁时间:6.28 秒
[55]:
Text(0, 0.5, 'ELBO 损失')
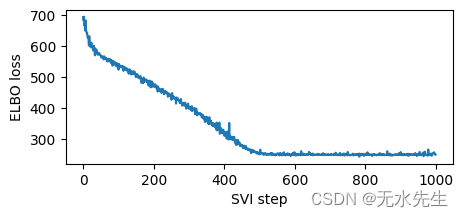
请注意,由于我们使用了高学习率,因此训练速度很快。有时模型和指南对学习率很敏感,首先要尝试的是降低学习率并增加步数。这对于深度神经网络的模型和指南尤其重要。我们建议从较低的学习率开始,然后逐渐增加,避免学习率太快,否则推理可能会发散或导致 NAN。
训练完向导后,我们可以通过从 Pyro 的参数存储中获取优化的向导参数值来检查。下面打印的每个(loc,scale)对参数化指南中的单个pyro.distributions.Normal分布,对应于模型中不同的未观察到的pyro.sample语句,类似于我们之前手写的custom_guide。
[56]:
for name, value in pyro.get_param_store().items():print(name, pyro.param(name).data.cpu().numpy())
自动法线.locs.a 9.173145 自动法线.scales.a 0.0703669 自动法线.locs.bA -1.8474661 自动正态.scales.bA 0.1407009 自动法线.locs.bR -0.19032118 自动法线.scales.bR 0.044044234 自动法线.locs.bAR 0.35599768 自动正态.scales.bAR 0.079374395 自动法线.locs.sigma -2.205863 自动正态.scales.sigma 0.060526706
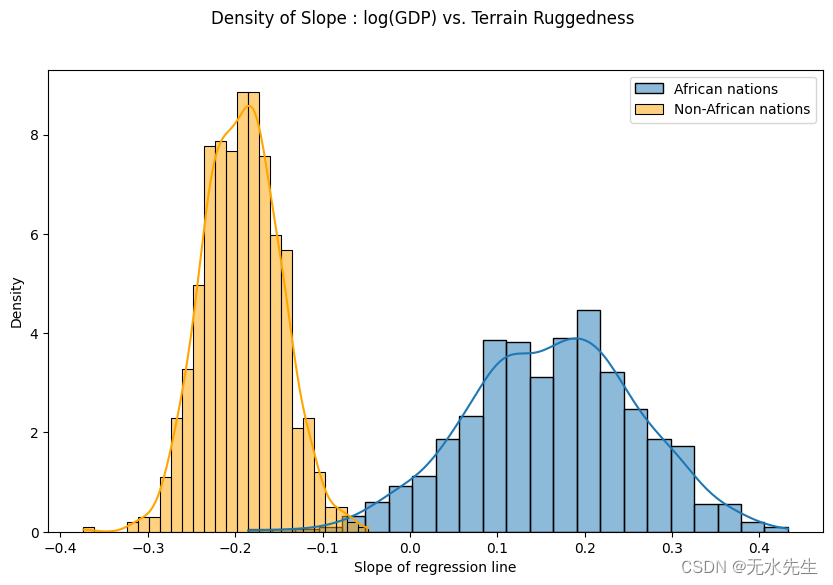
最后,让我们重新审视之前的问题,即地形崎岖度与 GDP 之间的关系对于模型参数估计的任何不确定性有多稳健。为此,我们绘制了考虑到非洲境内和境外国家地形崎岖程度的 GDP 对数斜率分布。
我们用从我们训练有素的指南中抽取的样本来表示这两种分布。要并行绘制多个样本,我们可以在pyro.plate 语句中调用指南,该语句重复并向量化指南中每个pyro.sample 语句的采样操作,如介绍pyro.plate 原语部分中所述。
[57]:
with pyro.plate("samples", 800, dim=-1):samples = auto_guide(is_cont_africa, ruggedness)gamma_within_africa = samples["bR"] + samples["bAR"]
gamma_outside_africa = samples["bR"]
如下所示,非洲国家的概率质量主要集中在正区域,其他国家反之亦然,这进一步证实了最初的假设。然而,非非洲国家的后验不确定性(橙色直方图的宽度)似乎远低于非洲国家(蓝色直方图的宽度),考虑到原始数据中看似相似的分布,这是令人惊讶的。我们将在下一节中进一步研究这种差异。
[58]:
fig = plt.figure(figsize=(10, 6))
sns.histplot(gamma_within_africa.detach().cpu().numpy(), kde=True, stat="density", label="African nations")
sns.histplot(gamma_outside_africa.detach().cpu().numpy(), kde=True, stat="density", label="Non-African nations", color="orange")
fig.suptitle("Density of Slope : log(GDP) vs. Terrain Ruggedness");
plt.xlabel("Slope of regression line")
plt.legend()
plt.show()
八、Pyro 中的模型评估
8.1 背景:使用后验预测检查的贝叶斯模型评估
为了评估我们是否可以相信我们的推理结果,我们将比较我们的模型诱导的可能新数据的后验预测分布与现有的观察到的数据。一般来说,计算这个分布是很棘手的,因为它取决于知道真实的后验,但我们可以使用从变分推理获得的近似后验轻松地近似它:
具体来说,要从后验预测中抽取近似样本,我们只需抽取一个样本 从近似后验,然后从给定样本的模型中观察到的变量的分布中进行采样
,就好像我们用(近似的)后验替换了先验。
8.2 示例:Pyro 中的后验预测不确定性
为了评估我们的示例线性回归模型,我们将使用Predictive实用程序类生成并可视化后验预测分布中的一些样本,该实用程序类实现了上面的方法,用于大约从 。
我们从经过训练的模型中生成 800 个样本。在内部,这是通过首先从 中生成潜在变量的样本guide,然后向前运行模型,同时将未观察到的pyro.sample语句返回的值更改为从 中采样的相应值来完成的guide。
[59]:
predictive = pyro.infer.Predictive(model, guide=auto_guide, num_samples=800) svi_samples = predictive(is_cont_africa, ruggedness, log_gdp=None) svi_gdp = svi_samples["obs"]
下面的代码特定于此示例,仅用于绘制每个国家的后验预测分布的 90% 可信区间(包含 90% 的概率质量的区间)。
[60]:
predictions = pd.DataFrame({"cont_africa": is_cont_africa,"rugged": ruggedness,"y_mean": svi_gdp.mean(0).detach().cpu().numpy(),"y_perc_5": svi_gdp.kthvalue(int(len(svi_gdp) * 0.05), dim=0)[0].detach().cpu().numpy(),"y_perc_95": svi_gdp.kthvalue(int(len(svi_gdp) * 0.95), dim=0)[0].detach().cpu().numpy(),"true_gdp": log_gdp,
})
african_nations = predictions[predictions["cont_africa"] == 1].sort_values(by=["rugged"])
non_african_nations = predictions[predictions["cont_africa"] == 0].sort_values(by=["rugged"])fig, ax = plt.subplots(nrows=1, ncols=2, figsize=(12, 6), sharey=True)
fig.suptitle("Posterior predictive distribution with 90% CI", fontsize=16)ax[0].plot(non_african_nations["rugged"], non_african_nations["y_mean"])
ax[0].fill_between(non_african_nations["rugged"], non_african_nations["y_perc_5"], non_african_nations["y_perc_95"], alpha=0.5)
ax[0].plot(non_african_nations["rugged"], non_african_nations["true_gdp"], "o")
ax[0].set(xlabel="Terrain Ruggedness Index", ylabel="log GDP (2000)", title="Non African Nations")ax[1].plot(african_nations["rugged"], african_nations["y_mean"])
ax[1].fill_between(african_nations["rugged"], african_nations["y_perc_5"], african_nations["y_perc_95"], alpha=0.5)
ax[1].plot(african_nations["rugged"], african_nations["true_gdp"], "o")
ax[1].set(xlabel="Terrain Ruggedness Index", ylabel="log GDP (2000)", title="African Nations");
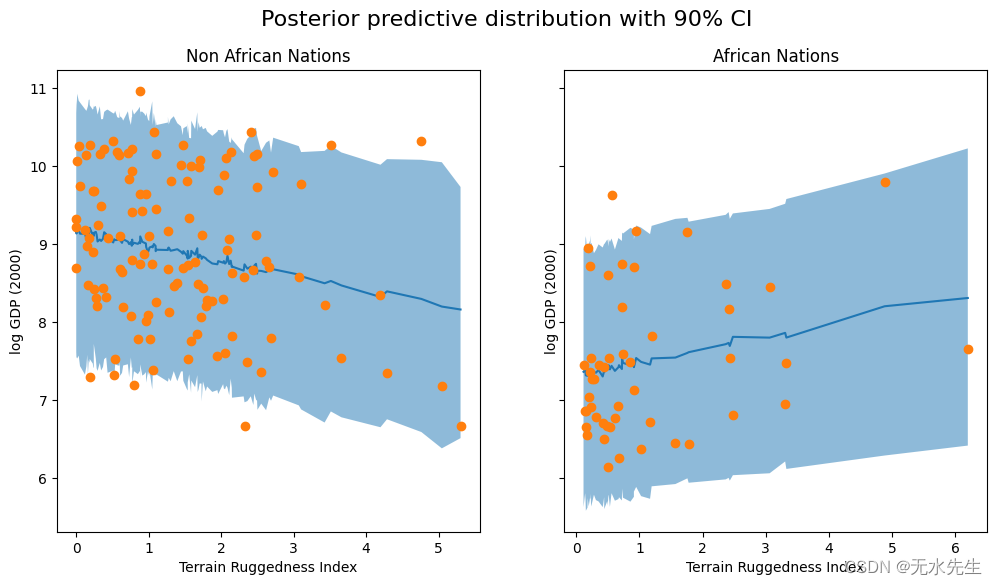
我们观察到,我们的模型和 90% CI 的结果占了我们在实践中观察到的大部分数据点,但仍有相当多的非非洲国家被我们的近似后验认为是不可能的。
8.3 示例:使用满秩指南重新审视贝叶斯回归
为了改进我们的结果,我们将尝试使用从所有参数的多元正态分布生成样本的指南。这使我们能够通过满秩协方差矩阵捕获潜在变量之间的相关性; 我们之前的指南忽略了这些相关性。也就是说,我们有
要手动编写这种形式的指南,我们需要组合所有潜在变量,以便我们可以将pyro.sample它们从单个pyro.distributions.MultivariateNormal分布中组合在一起,选择一个实现constrain()来固定值为了积极,创建并初始化参数
适当的形状,并约束变分参数Σ在整个优化过程中保持有效的协方差矩阵(即保持正定)。
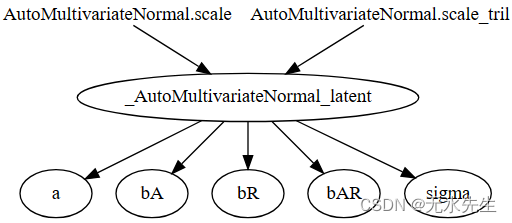
这将非常乏味,因此我们将使用另一个自动指南来为我们处理所有这些簿记工作,pyro.infer.autoguide.AutoMultivariateNormal:
[61]:
mvn_guide = pyro.infer.autoguide.AutoMultivariateNormal(model)
使用pyro.render_model表明,与我们的平均场AutoNormal指南不同,本指南明确捕获了模型中所有潜在变量之间的相关性。可视化图中的新_AutoMultivariateNormal_latent节点对应于上面的等式;与模型变量相对应的其他节点只是简单地索引到该张量值随机变量的各个元素。
[62]:
pyro.render_model(mvn_guide, model_args=(is_cont_africa, ruggedness, log_gdp), render_params=True)
[62]:
我们的模型以及其余的推理和评估代码与以前相比基本上没有变化:我们使用pyro.optim.Adam和pyro.infer.Trace_ELBO来拟合新指南的参数,然后从指南中采样并使用Predictive从后验预测分布中采样。
Predictive有一个值得注意的细微差别:我们通过关键字参数直接将指南样本传递给预测,posterior_samples而不是像上一节那样传递指南,从而重用指南样本进行预测。这避免了不必要的重复计算。
[63]:
%%time
pyro.clear_param_store()
mvn_guide = pyro.infer.autoguide.AutoMultivariateNormal(model)
svi = pyro.infer.SVI(model,mvn_guide,pyro.optim.Adam({"lr": 0.02}),pyro.infer.Trace_ELBO())losses = []
for step in range(1000 if not smoke_test else 2):loss = svi.step(is_cont_africa, ruggedness, log_gdp)losses.append(loss)if step % 100 == 0:logging.info("Elbo loss: {}".format(loss))plt.figure(figsize=(5, 2))
plt.plot(losses)
plt.xlabel("SVI step")
plt.ylabel("ELBO loss")with pyro.plate("samples", 800, dim=-1):mvn_samples = mvn_guide(is_cont_africa, ruggedness)mvn_gamma_within_africa = mvn_samples["bR"] + mvn_samples["bAR"]
mvn_gamma_outside_africa = mvn_samples["bR"]# Interface note: reuse guide samples for prediction by passing them to Predictive
# via the posterior_samples keyword argument instead of passing the guide as above
assert "obs" not in mvn_samples
mvn_predictive = pyro.infer.Predictive(model, posterior_samples=mvn_samples)
mvn_predictive_samples = mvn_predictive(is_cont_africa, ruggedness, log_gdp=None)mvn_gdp = mvn_predictive_samples["obs"]
埃尔博损失:702.4906432628632 埃尔博损失:548.7575962543488 埃尔博损失:490.9642730951309 埃尔博损失:401.81392109394073 埃尔博损失:333.7779414653778 埃尔博损失:247.01823914051056 埃尔博损失:248.3894298672676 埃尔博损失:247.3512134552002 埃尔博损失:248.2095948457718 埃尔博损失:247.21006780862808
CPU时间:用户1分钟45秒,系统:21.9毫秒,总计:1分钟45秒 挂壁时间:7.03 秒
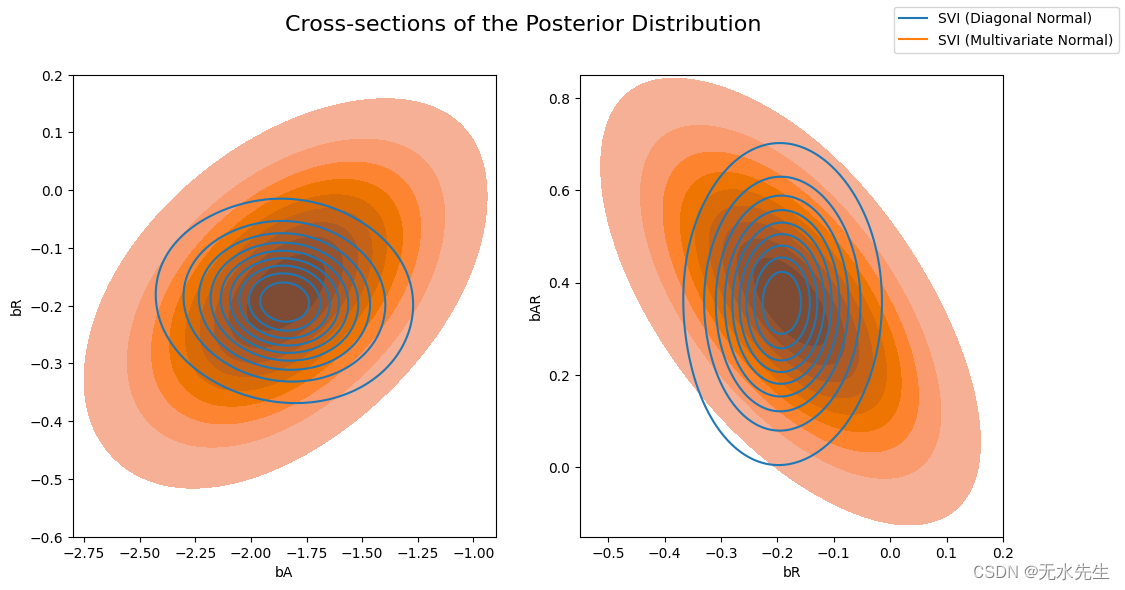
现在让我们比较一下前一个AutoDiagonalNormal指南与AutoMultivariateNormal指南计算的后验概率。我们将在视觉上叠加后验分布的横截面(回归系数对的联合分布)。
请注意,多元正态近似比平均场近似更加分散,并且能够对后验系数之间的相关性进行建模。
[64]:
svi_samples = {k: v.detach().cpu().numpy() for k, v in samples.items()}
svi_mvn_samples = {k: v.detach().cpu().numpy() for k, v in mvn_samples.items()}fig, axs = plt.subplots(nrows=1, ncols=2, figsize=(12, 6))
fig.suptitle("Cross-sections of the Posterior Distribution", fontsize=16)
sns.kdeplot(x=svi_samples["bA"], y=svi_samples["bR"], ax=axs[0], bw_adjust=4 )
sns.kdeplot(x=svi_mvn_samples["bA"], y=svi_mvn_samples["bR"], ax=axs[0], shade=True, bw_adjust=4)
axs[0].set(xlabel="bA", ylabel="bR", xlim=(-2.8, -0.9), ylim=(-0.6, 0.2))sns.kdeplot(x=svi_samples["bR"], y=svi_samples["bAR"], ax=axs[1],bw_adjust=4 )
sns.kdeplot(x=svi_mvn_samples["bR"], y=svi_mvn_samples["bAR"], ax=axs[1], shade=True, bw_adjust=4)
axs[1].set(xlabel="bR", ylabel="bAR", xlim=(-0.55, 0.2), ylim=(-0.15, 0.85))for label, color in zip(["SVI (Diagonal Normal)", "SVI (Multivariate Normal)"], sns.color_palette()[:2]):plt.plot([], [],label=label, color=color)fig.legend(loc='upper right')
[64]:
<matplotlib.legend.Legend 位于 0x7f8971b854c0>
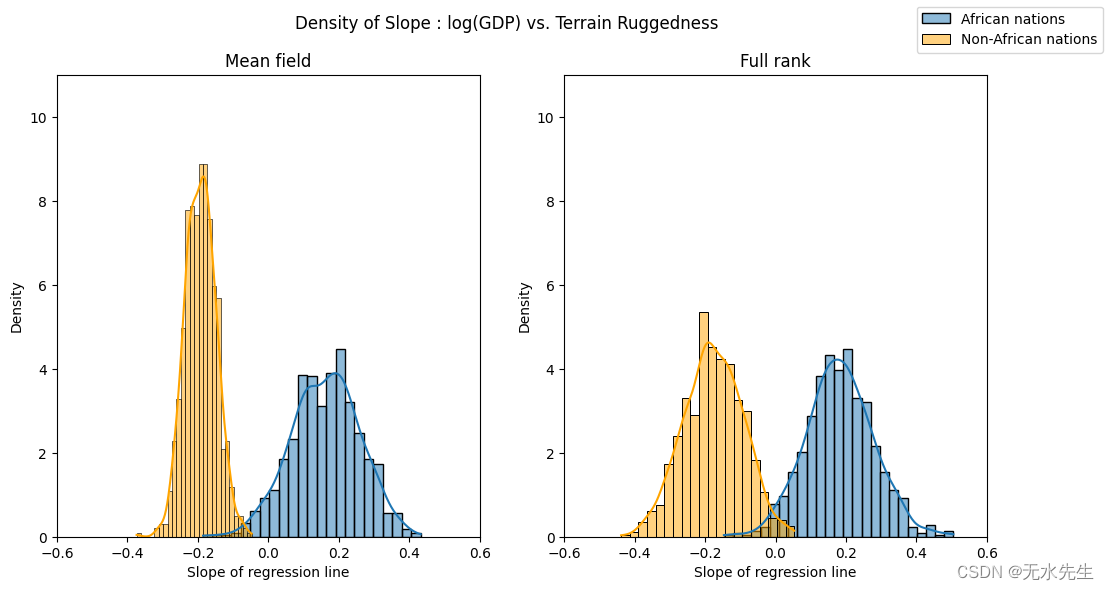
通过重复我们对非洲内外国家的坚固性-GDP 系数分布的可视化,我们可以看到这一点的含义。现在,两个系数中每个系数的后验不确定性大致相同,这与目测数据所表明的结果一致。
[65]:
fig, axs = plt.subplots(nrows=1, ncols=2, figsize=(12, 6))
fig.suptitle("Density of Slope : log(GDP) vs. Terrain Ruggedness");sns.histplot(gamma_within_africa.detach().cpu().numpy(), ax=axs[0], kde=True, stat="density", label="African nations")
sns.histplot(gamma_outside_africa.detach().cpu().numpy(), ax=axs[0], kde=True, stat="density", color="orange", label="Non-African nations")
axs[0].set(title="Mean field", xlabel="Slope of regression line", xlim=(-0.6, 0.6), ylim=(0, 11))sns.histplot(mvn_gamma_within_africa.detach().cpu().numpy(), ax=axs[1], kde=True, stat="density", label="African nations")
sns.histplot(mvn_gamma_outside_africa.detach().cpu().numpy(), ax=axs[1], kde=True, stat="density", color="orange", label="Non-African nations")
axs[1].set(title="Full rank", xlabel="Slope of regression line", xlim=(-0.6, 0.6), ylim=(0, 11))handles, labels = axs[1].get_legend_handles_labels()
fig.legend(handles, labels, loc='upper right');
我们在两种近似下可视化非非洲国家后验预测分布的 90% 可信区间,验证我们对观测数据的覆盖范围有所改善:
[66]:
mvn_predictions = pd.DataFrame({"cont_africa": is_cont_africa,"rugged": ruggedness,"y_mean": mvn_gdp.mean(dim=0).detach().cpu().numpy(),"y_perc_5": mvn_gdp.kthvalue(int(len(mvn_gdp) * 0.05), dim=0)[0].detach().cpu().numpy(),"y_perc_95": mvn_gdp.kthvalue(int(len(mvn_gdp) * 0.95), dim=0)[0].detach().cpu().numpy(),"true_gdp": log_gdp,
})
mvn_non_african_nations = mvn_predictions[mvn_predictions["cont_africa"] == 0].sort_values(by=["rugged"])fig, ax = plt.subplots(nrows=1, ncols=2, figsize=(12, 6), sharey=True)
fig.suptitle("Posterior predictive distribution with 90% CI", fontsize=16)ax[0].plot(non_african_nations["rugged"], non_african_nations["y_mean"])
ax[0].fill_between(non_african_nations["rugged"], non_african_nations["y_perc_5"], non_african_nations["y_perc_95"], alpha=0.5)
ax[0].plot(non_african_nations["rugged"], non_african_nations["true_gdp"], "o")
ax[0].set(xlabel="Terrain Ruggedness Index", ylabel="log GDP (2000)", title="Non African Nations: Mean-field")ax[1].plot(mvn_non_african_nations["rugged"], mvn_non_african_nations["y_mean"])
ax[1].fill_between(mvn_non_african_nations["rugged"], mvn_non_african_nations["y_perc_5"], mvn_non_african_nations["y_perc_95"], alpha=0.5)
ax[1].plot(mvn_non_african_nations["rugged"], mvn_non_african_nations["true_gdp"], "o")
ax[1].set(xlabel="Terrain Ruggedness Index", ylabel="log GDP (2000)", title="Non-African Nations: Full rank");

8.4 下一步
如果您已经完成了这一步,那么您就可以开始使用 Pyro 了!按照首页上的说明安装 Pyro并查看我们其余的示例和教程,特别是实用 Pyro 和 PyTorch教程系列,其中包括本教程中使用更原生 PyTorch编写的相同贝叶斯回归分析的版本建模API。
有关 Pyro 中变分推理数学的更多背景信息,请查看我们的 SVI 教程系列,从第 1 部分开始。如果您是 PyTorch 或深度学习的新手,您也可能会从阅读官方介绍“使用 PyTorch 进行深度学习”中受益。
大多数达到这一点的用户还会在 Pyro 基本读物中找到我们的张量形状指南。Pyro 广泛使用PyTorch 和其他数组库中的“数组广播”行为来并行化模型和推理算法,虽然最初可能很难理解这种行为,但应用直觉和经验法则将会有很长的路要走。使您的体验顺畅并避免令人讨厌的形状错误的方法。
相关文章:
【torch高级】一种新型的概率学语言pyro(02/2)
前文链接:【torch高级】一种新型的概率学语言pyro(01/2) 七、Pyro 中的推理 7.1 背景:变分推理 引言中的每项计算(后验分布、边际似然和后验预测分布)都需要执行积分,而这通常是不可能的或计算…...
Git基本概念与使用
一、Git基本概念 git,是一种分布式版本控制软件,与CVS、Subversion这类的集中式版本控制工具不同,它采用了分布式版本库的作法,不需要服务器端软件,就可以运作版本控制,使得源代码的发布和交流极其方便。g…...

Kubernetes数据卷Volume和数据卷分类(emptyDir、nfs、hostPath、ConfigMap)详解
Kubernetes数据卷Volume和数据卷分类详解 数据卷概述 Kubernetes Volume(数据卷)主要解决了如下两方面问题: 数据持久性:通常情况下,容器运行起来之后,写入到其文件系统的文件暂时性的。当容器崩溃后&am…...
【MATLAB源码-第59期】基于matlab的QPSK,16QAM164QAM等调制方式误码率对比,调制解调函数均是手动实现未调用内置函数。
操作环境: MATLAB 2022a 1、算法描述 正交幅度调制(QAM,Quadrature Amplitude Modulation)是一种在两个正交载波上进行幅度调制的调制方式。这两个载波通常是相位差为90度(π/2)的正弦波,因此…...
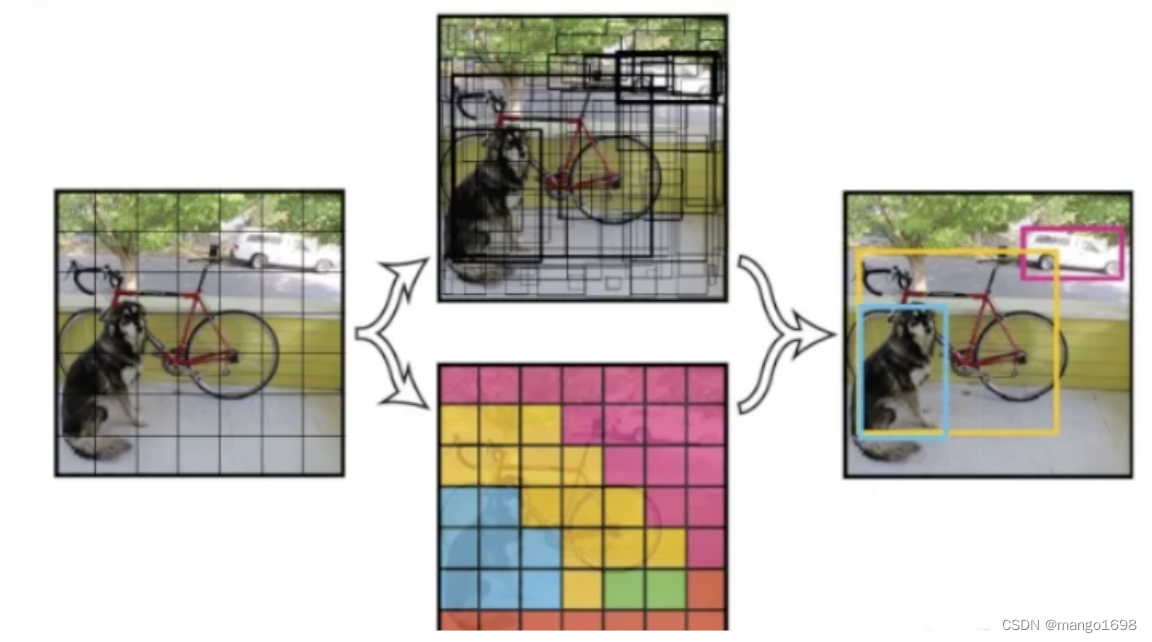
经典目标检测神经网络 - RCNN、SSD、YOLO
文章目录 1. 目标检测算法分类2. 区域卷积神经网络2.1 R-CNN2.2 Fast R-CNN2.3 Faster R-CNN2.4 Mask R-CNN2.5 速度和精度比较 3. 单发多框检测(SSD)4. YOLO 1. 目标检测算法分类 目标检测算法主要分两类:One-Stage与Two-Stage。One-Stage与…...

mysql存在10亿条数据,如何高效随机返回N条纪录,sql如何写
1 低效方案 1.使用ORDER BY RAND(): SELECT * FROM your_table ORDER BY RAND() LIMIT 1; 这将随机排序表中的所有行,并且通过LIMIT 1仅返回第一行,从而返回一个随机记录。然而,对于大型表来说,ORDER BY RAND()可能会…...
c语言中啥时候用double啥时候用float?
c语言中啥时候用double啥时候用float? 一般来说,可以使用double来表示具有更高精度要求的浮点数,因为它可以存储更大范围的数值并且具有更高的精度。 最近很多小伙伴找我,说想要一些c语言资料,然后我根据自己从业十年…...
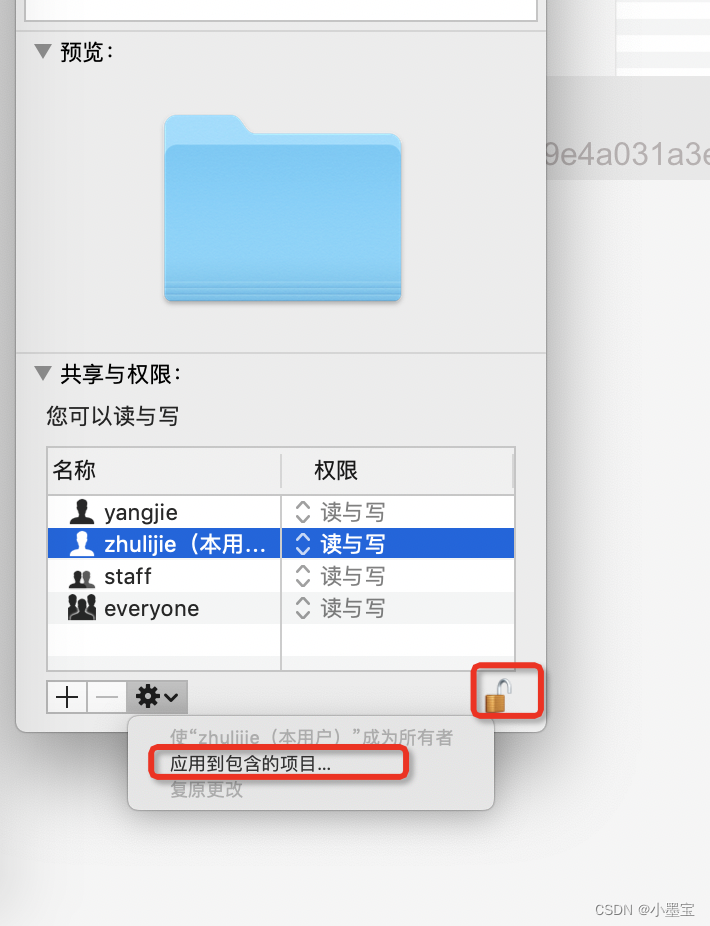
vscode 保存 “index.tsx“失败: 权限不足。选择 “以超级用户身份重试“ 以超级用户身份重试。
vscode 保存 "index.tsx"失败: 权限不足。选择 “以超级用户身份重试” 以超级用户身份重试。 操作:mac在文件夹中创建文件,sudo 创建umiJs项目 解决:修改文件夹权限 右键文件夹...

综合性练习
名片管理系统 综合性项目实现—详细请点这里 dict {} # 定义一个空字典,用于存储信息。 list [] # 定义一个列表,存储name值 list1 [] #存储age值 list2 [] #存储phone值 def people_tips(): #提示print("*****" * 10)print("…...
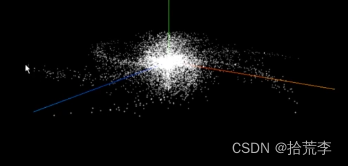
threejs(7)-精通粒子特效
一、初识Points与点材质 // 设置点材质 const pointsMaterial new THREE.PointsMaterial(); import * as THREE from "three"; // 导入轨道控制器 import { OrbitControls } from "three/examples/jsm/controls/OrbitControls"; // 导入动画库 import gsa…...

使用了百度OCR,记录一下
由于识别ocr有的频率不高,图片无保密性需求,也不想太大的库, 就决定还是用下api算了,试用了几家,决定用百度的ocr包,相对简单。 遇到的问题里面下列基本有提到:例如获取ID,KEY&…...
5.OsgEarth加载地形
愿你出走半生,归来仍是少年! 在三维场景中除了使用影像体现出地貌情况,还需要通过地形体现出地势起伏,还原一个相对真实的三维虚拟世界。 osgEarth可通过直接加载Dem数据进行场景内的地形构建。 1.数据准备 由于我也没有高程数据,…...

基于回溯搜索算法的无人机航迹规划-附代码
基于回溯搜索算法的无人机航迹规划 文章目录 基于回溯搜索算法的无人机航迹规划1.回溯搜索搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用回溯搜索算法来优化无人机航迹规划。 …...
微信小程序云开发笔记-初始化商城小程序
缘起:由于痴迷机器人,店都快倒闭了,没办法,拿出点精力给店里搞个小程序,要多卖货才能活下来搞机器人,在此记录一下搞小程序的过程,要不然搞完又忘了。腾讯的云开发,前端和后端都有了…...
vulnhub_DeRPnStiNK靶机渗透测试
VulnHub2018_DeRPnStiNK靶机 https://www.vulnhub.com/entry/derpnstink-1,221/ flag1(52E37291AEDF6A46D7D0BB8A6312F4F9F1AA4975C248C3F0E008CBA09D6E9166) flag2(a7d355b26bda6bf1196ccffead0b2cf2b81f0a9de5b4876b44407f1dc07e51e6) flag4(49dca65f362fee401292ed7ada96f9…...

网站如何判断请求是来自手机-移动端还是PC-电脑端?如何让网站能适应不同的客户端?
如果网站需要实现手机和PC双界面适应,可以有两种方式: 第一种是响应式界面,根据屏幕宽度来判定显示的格式。这种需要前端来做,手机/PC共用一套代码,有一定的局限性。 第二种是后端通过request请求头中的内容来分析客户…...

sass和 scss的区别?
Sass(Syntactically Awesome Style Sheets)和 SCSS(Sassy CSS)是两种流行的 CSS 预处理器,它们扩展了普通的 CSS 语法,提供了更多的功能和便利性。下面是 Sass 和 SCSS 的主要区别: 1ÿ…...
Vuex 动态模块状态管理器
模块化思想 我们之前的博文已经讲述了Vuex怎么使用命名空间实现模块化状态管理。详情可以看: Vuex命名空间及如何获取根模块、兄弟模块状态管理器_AI3D_WebEngineer的博客-CSDN博客https://blog.csdn.net/weixin_42274805/article/details/133269196?ops_request_…...
实现分片上传、断点续传、秒传 (JS+NodeJS)(TypeScript)
一、引入及效果 上传文件是一个很常见的操作,但是当文件很大时,上传花费的时间会非常长,上传的操作就会具有不确定性,如果不小心连接断开,那么文件就需要重新上传,导致浪费时间和网络资源。 所以࿰…...
浅谈安科瑞EMS能源管控平台建设的意义-安科瑞 蒋静
摘 要:能源消耗量大、能源运输供给不足、环境压力日趋增加、能耗双控等一系列问题一直困扰着钢铁冶金行业,制约着企业快速稳定健康发展。本文介绍的安科瑞EMS能源管控平台,采用自动化、信息化技术,实现从能源数据采集、过程监控、…...

【RT-DETR实战】070、模型分析工具:PyTorch Profiler性能分析
上周在部署RT-DETR到边缘设备时遇到一个诡异现象:模型推理时延波动极大,有时30ms,偶尔突然跳到200ms。 盯着代码看了半天没发现逻辑问题,数据流也正常。这种时候,靠猜是没用的,必须上性能分析工具——PyTorch Profiler。 今天我们就来聊聊怎么用它揪出那些藏在细节里的…...

基于Arduino Uno与MQ-2传感器的智能气体检测报警系统DIY全攻略
1. 项目概述与核心思路最近在捣鼓家里的智能安防,琢磨着能不能自己做一个成本可控、反应灵敏的气体检测报警装置。市面上成品烟雾报警器虽然成熟,但要么功能单一,要么价格不菲,而且很难根据自己的需求进行定制化调整,比…...

AI 应用原型开发阶段利用 Taotoken 快速进行多模型效果对比
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 AI 应用原型开发阶段利用 Taotoken 快速进行多模型效果对比 在构建一个 AI 应用的原型时,开发者常常面临一个核心问题&…...

AI算法工程师如何进行数据预处理?这5个步骤让你的数据更优质
在AI模型开发与测试的全流程中,数据质量直接决定了最终模型的效果上限——哪怕是最先进的大语言模型,用劣质数据训练出来也只能输出劣质结果。对于软件测试从业者来说,不管是参与AI模型的功能测试、性能测试,还是负责测试数据集的…...

AI 如何改变软件工程:Martin Fowler 视角 + 实战洞见
AI 如何改变软件工程:Martin Fowler 视角 实战洞见 AI(尤其是 LLM)是软件工程自高级语言(从汇编到 C/Fortran)以来最大的转变。它引入了非确定性(Non-deterministic)编程,改变了从编…...

告别Selenium?手把手教你用Playwright录制脚本,5分钟搞定Web自动化测试
5分钟极速上手Playwright脚本录制:零代码实现Web自动化测试当产品经理突然丢给你一个刚上线的电商活动页,要求半小时内完成所有核心链路测试时,传统的手写Selenium脚本显然来不及。作为测试工程师,我最近发现微软开源的Playwright…...

机器学习预测关税冲击下的股市波动:随机森林、SVR、kNN与线性回归实战对比
1. 项目概述与核心问题拆解做量化研究的朋友们,尤其是关注宏观事件对市场冲击的,应该都对“黑天鹅”事件不陌生。政策变动,特别是像关税这种直接影响国际贸易成本和公司利润的宏观变量,往往会在短期内引发市场剧烈波动。传统的做法…...

Mapbox Studio Classic核心功能解析:CartoCSS与矢量瓦片技术详解
Mapbox Studio Classic核心功能解析:CartoCSS与矢量瓦片技术详解 【免费下载链接】mapbox-studio-classic 项目地址: https://gitcode.com/gh_mirrors/ma/mapbox-studio-classic Mapbox Studio Classic是一款强大的桌面地图设计工具,专为创建专业…...

终极指南:如何在Windows上直接访问Linux RAID阵列数据
终极指南:如何在Windows上直接访问Linux RAID阵列数据 【免费下载链接】winmd WinMD 项目地址: https://gitcode.com/gh_mirrors/wi/winmd 你是否曾面临这样的困境:企业Linux服务器上存储着重要的业务数据,使用mdadm创建的RAID阵列运行…...

从 ODesign 到分子世界模型:AI 制药真正要学的,不是分子,而是相互作用
AI 制药这些年讲过许多故事。 一开始讲虚拟筛选,后来讲分子生成,再后来讲 AlphaFold、扩散模型、蛋白设计、抗体设计、干湿闭环。每一代故事都有自己的热闹,也有自己的贫乏。热闹在于工具越来越多,贫乏在于许多工具仍然像一排分工…...