经典目标检测神经网络 - RCNN、SSD、YOLO
文章目录
- 1. 目标检测算法分类
- 2. 区域卷积神经网络
- 2.1 R-CNN
- 2.2 Fast R-CNN
- 2.3 Faster R-CNN
- 2.4 Mask R-CNN
- 2.5 速度和精度比较
- 3. 单发多框检测(SSD)
- 4. YOLO
1. 目标检测算法分类
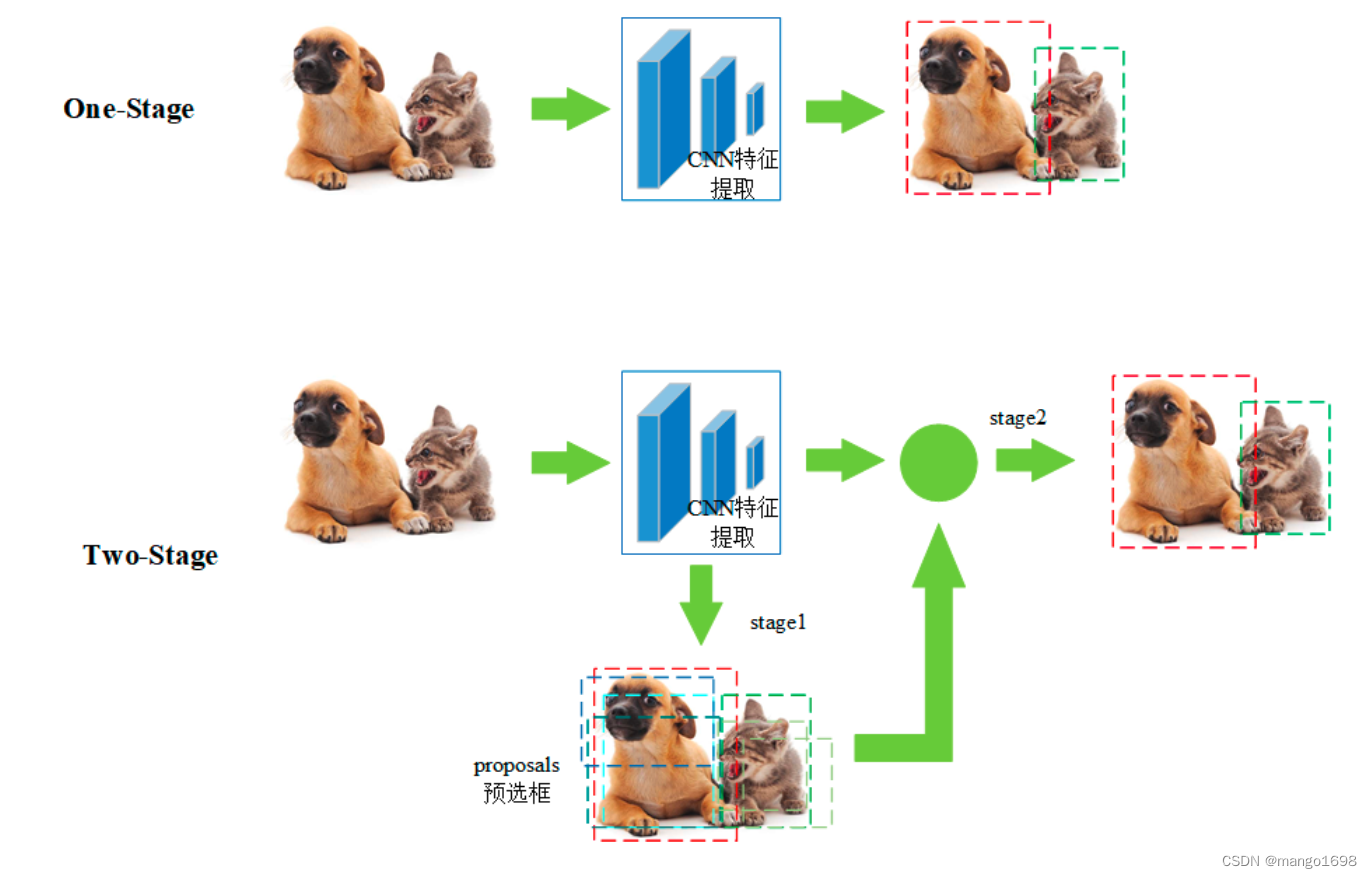
目标检测算法主要分两类:One-Stage与Two-Stage。One-Stage与Two-Stage是两种不同的思路,其各有各的优缺点。
One-Stage
主要思路:直接通过卷积神经网络提取特征,预测目标的分类与定位;
Two-Stage
主要思路:先进行区域生成,即生成候选区域(Region Proposal),在通过卷积神经网络预测目标的分类与定位;
优缺点
| 优缺点 | One-Stage | Two-Stage |
|---|---|---|
| 优点 | 速度快;避免背景错误产生false positives; 学到物体的泛化特征 | 精度高(定位、检出率);Anchor机制;共享计算量 |
| 缺点 | 精度低(定位、检出率);小物体的检测效果不好 | 速度慢;训练时间长;误报相对高 |
从目前看,在移动端一般使用 One-Stage算法。现在很难说,精度和准确率的问题,因为影响因素不仅仅取决于算法,还跟数据集大小、图像标注质量、训练参数等有很大的关系。
主要算法
One-Stage:YOLO系列(v1-v8),SSD系列(R-SSD、DSSD、FSSD等),Retina-Net,DetectNet,SqueezeDet。
Two-Stage:RCNN系列(Fast-RCNN、Faster-RCNN、Mask-RCNN),SPPNet,R-FCN。
2. 区域卷积神经网络
2.1 R-CNN
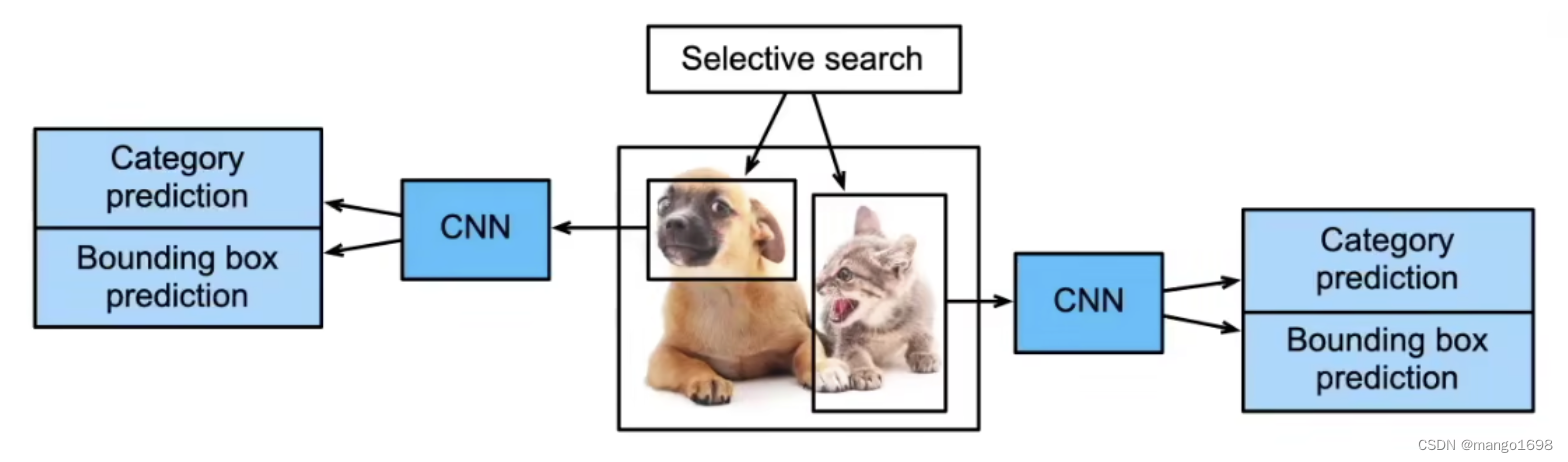
使用启发式搜索算法来选择锚框。
使用预训练模型来对每个锚框抽取特征。
训练一个SVM来对类别分类。
训练一个线性回归模型来预测边缘偏移框。
当锚框每次选择的大小不同,我们如何使这些锚框称为一个batch呢?
兴趣区域(ROI)池化层
ROI Pooling
- 给定一个锚框,均匀分割成 n × m \ n\times\ m n× m块,输出每块里的最大值
- 不管锚框多大,总是输出$\ nm\ $个值

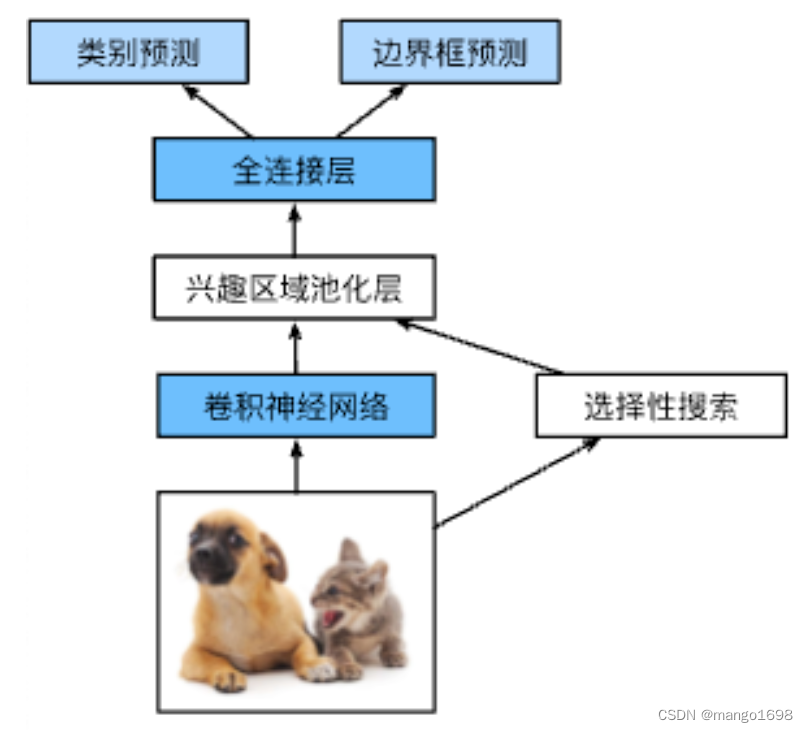
2.2 Fast R-CNN
对图片整体抽取特征。
- 不再对每一个锚框做CNN的特征抽取,而是对图片整体使用CNN进行特征抽取
- 使用RoI池化层对每个锚框生成固定长度特征
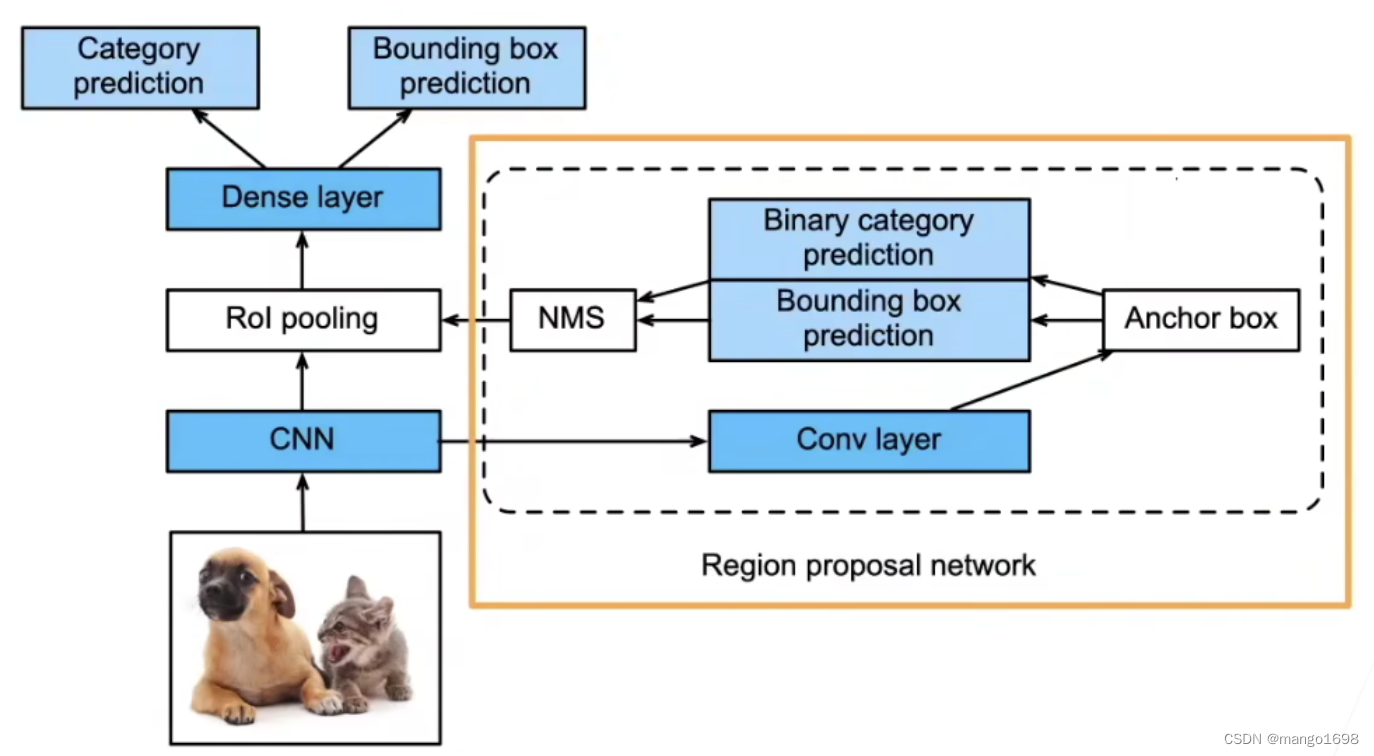
2.3 Faster R-CNN
- 使用一个区域提议网络来代替启发式搜索,来获得更好的锚框。
2.4 Mask R-CNN
- 如果有像素级别的标号,使用FCN来利用这些信息
- 在无人车领域运用较多
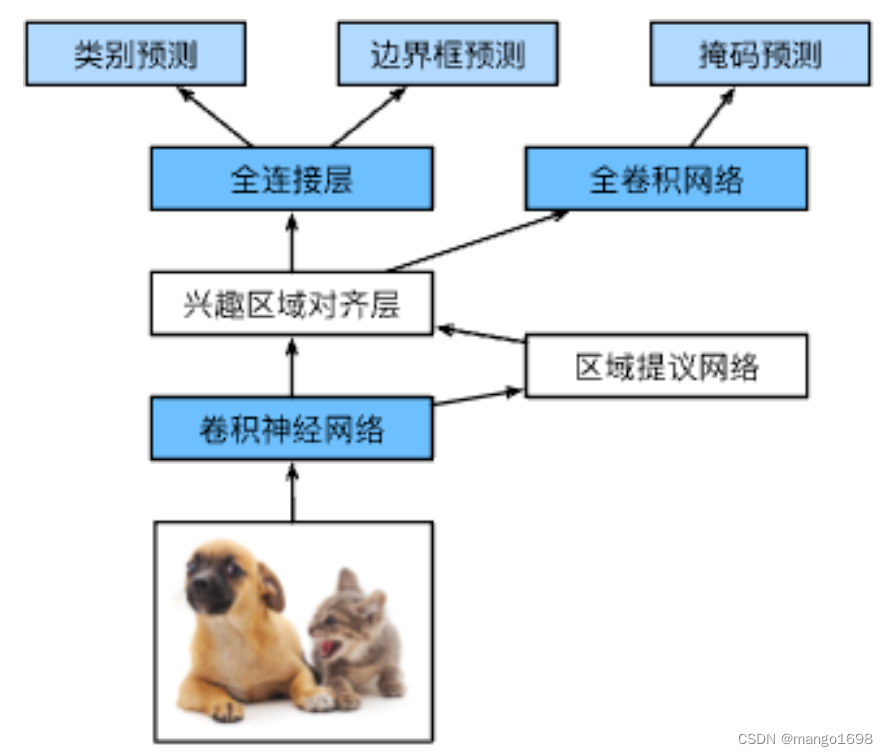
在做像素级别预测时,边界位置不要发生太多的错位。
2.5 速度和精度比较
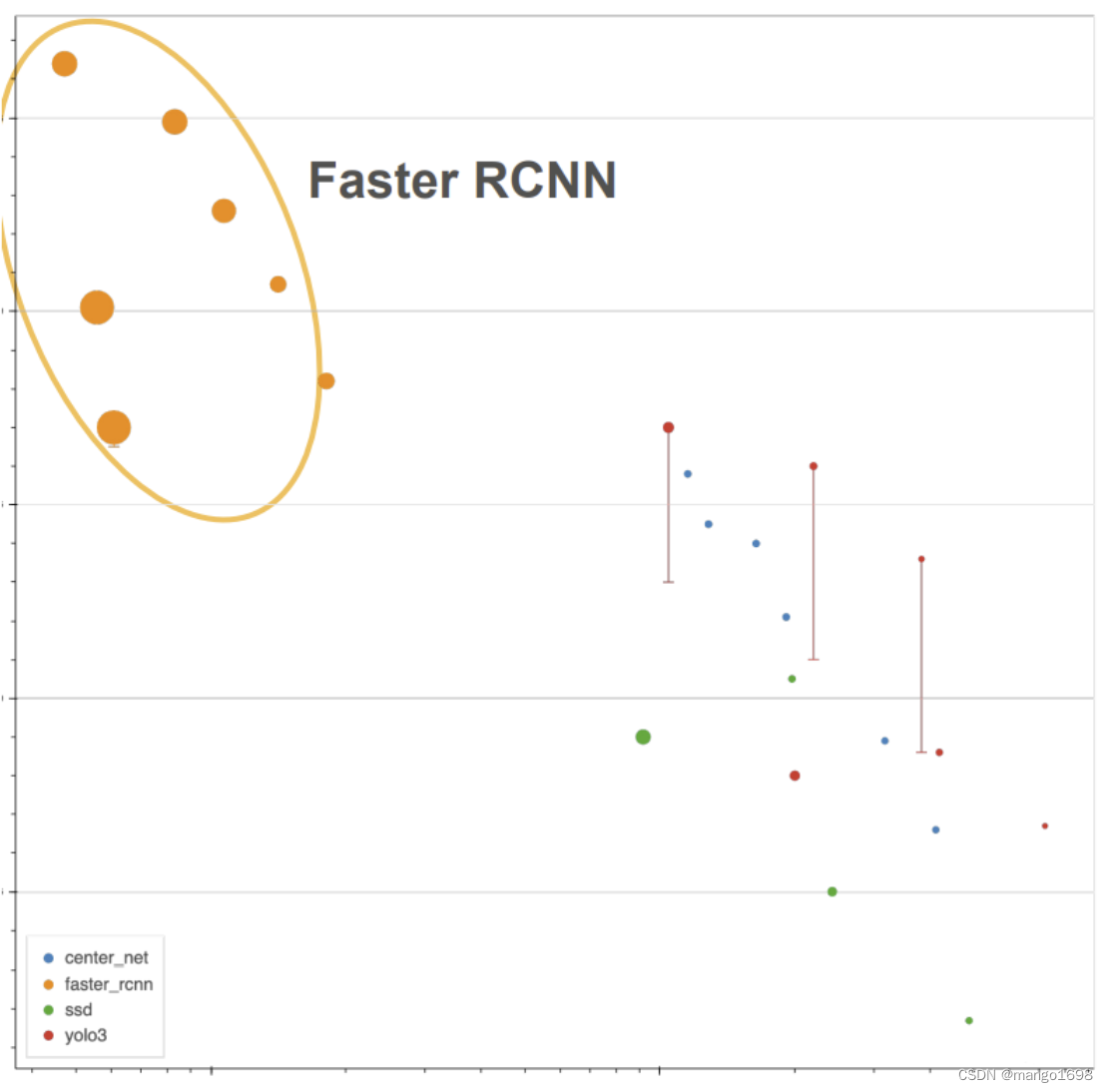
总结:
- R-CNN是最早、也是最有名的一类基于锚框和CNN的目标检测算法
- Fast/Faster R-CNN持续提升性能
- Faster R-CNN和Mask R-CNN是在最求高精度场景下的常用算法
3. 单发多框检测(SSD)
SSD全称Single Shot Multibox Detector,是一种单阶段目标检测器。其优点是原始的YOLO和Faster R-CNN在推理速度和精度之间取得了更好的平衡。SSD模型是由Wei Liu等人在使用卷积神经网络(CNN)进行目标检测的研究中,提出的一种改进思路。
SSD用于图像分类、物体检测和语义分割等各种深度学习任务。相对于其他目标检测算法,SSD模型有更高的精度,而且速度也是非常快的。其主要思路是通过在CNN的最后几层添加多个预测层实现多尺度的目标检测,然后通过一个过滤策略对每个检测框进行筛选,最后输出最终的检测结果。
生成锚框
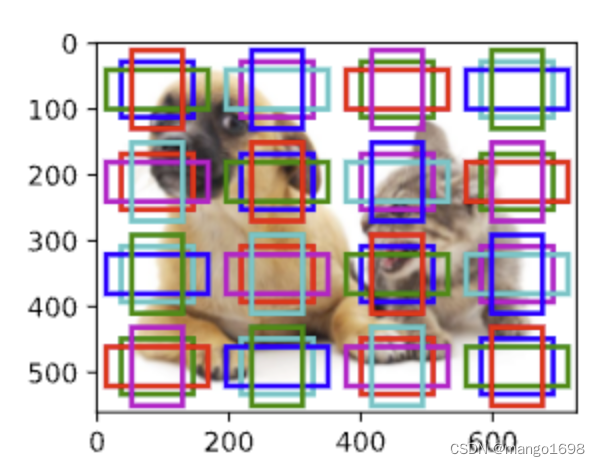
- 对每个像素,生成多个以它为中心的锚框
- 给定n个大小为 s 1 , s 2 , . . . , s n s_1,s_2,...,s_n s1,s2,...,sn和 m m m个高宽比,那么生成 n + m − 1 n+m-1 n+m−1锚框,其大小和高宽比分别为:
( s 1 , r 1 ) , ( s 2 , r 1 ) , . . . , ( s n , r 1 ) , ( s 1 , r 2 ) , . . . , ( s 1 , r m ) (s_1,r_1),(s_2,r_1),...,(s_n,r_1),(s_1,r_2),...,(s_1,r_m) (s1,r1),(s2,r1),...,(sn,r1),(s1,r2),...,(s1,rm)
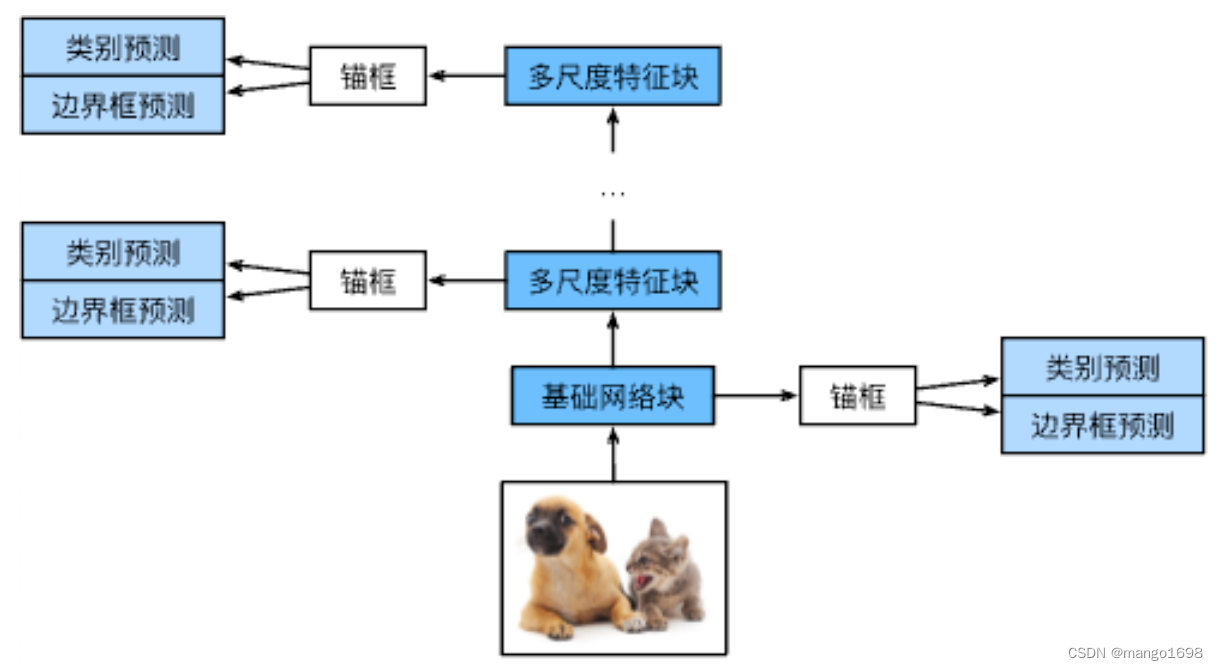
SSD模型
- 一个基础网络来抽取特征,然后多个卷积层块来减半高宽
- 在每段都生成锚框
- 底部段来拟合小物体,顶部短来集合大物体
- 对每个锚框预测类别和边缘框
总结:
- SSD通过单神经网络来检测模型
- 以每个像素为中心的产生多个锚框
- 在多个段段输出上进行多尺度的检测
4. YOLO
You Only Look Once
YOLO系列算法是一类典型的one-stage目标检测算法,其利用anchor box将分类与目标定位的回归问题结合起来,从而做到了高效、灵活和泛化性能好,所以在工业界也十分受欢迎。
Yolo算法采用一个单独的CNN模型实现end-to-end的目标检测,核心思想就是利用整张图作为网络的输入,直接在输出层回归 bounding box(边界框) 的位置及其所属的类别。
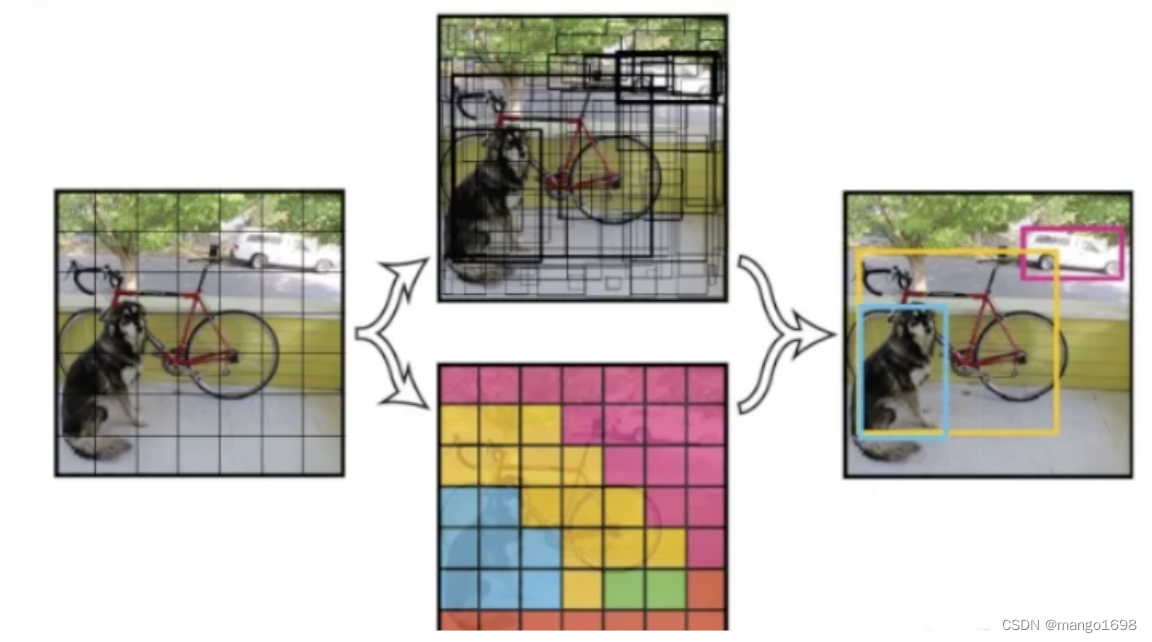
yolo尽量让锚框不重叠。
- SSD中锚框大量重叠,因此浪费了很多计算
- yolo将图片均匀分成 S × S S\times S S×S个锚框
- 每个锚框预测 B B B个边缘框
- 后续版本(V2,V3,V4…)有持续改进
YOLO家族进化史(V1-V8)
- YOLOv1
- YOLOv2:对YOLOv1进行改进
- YOLOv3:对YOLOv2进行改进
- YOLOv4:对YOLOv3进行改进
- YOLOv5:对YOLOv4进行改进
- YOLOx:以YOLOv3作为基础网络进行改进
- YOLOv6:由美团推出,更加适应GPU设备,算法思路类似YOLOv5(backbone+neck)+YOLOX(head)
- YOLOv7:是YOLOv4团队的续作,检测算法与YOLOv4,v5类似
- YOLOv8:是YOLOv5团队进一步开发的
相关文章:
经典目标检测神经网络 - RCNN、SSD、YOLO
文章目录 1. 目标检测算法分类2. 区域卷积神经网络2.1 R-CNN2.2 Fast R-CNN2.3 Faster R-CNN2.4 Mask R-CNN2.5 速度和精度比较 3. 单发多框检测(SSD)4. YOLO 1. 目标检测算法分类 目标检测算法主要分两类:One-Stage与Two-Stage。One-Stage与…...

mysql存在10亿条数据,如何高效随机返回N条纪录,sql如何写
1 低效方案 1.使用ORDER BY RAND(): SELECT * FROM your_table ORDER BY RAND() LIMIT 1; 这将随机排序表中的所有行,并且通过LIMIT 1仅返回第一行,从而返回一个随机记录。然而,对于大型表来说,ORDER BY RAND()可能会…...
c语言中啥时候用double啥时候用float?
c语言中啥时候用double啥时候用float? 一般来说,可以使用double来表示具有更高精度要求的浮点数,因为它可以存储更大范围的数值并且具有更高的精度。 最近很多小伙伴找我,说想要一些c语言资料,然后我根据自己从业十年…...
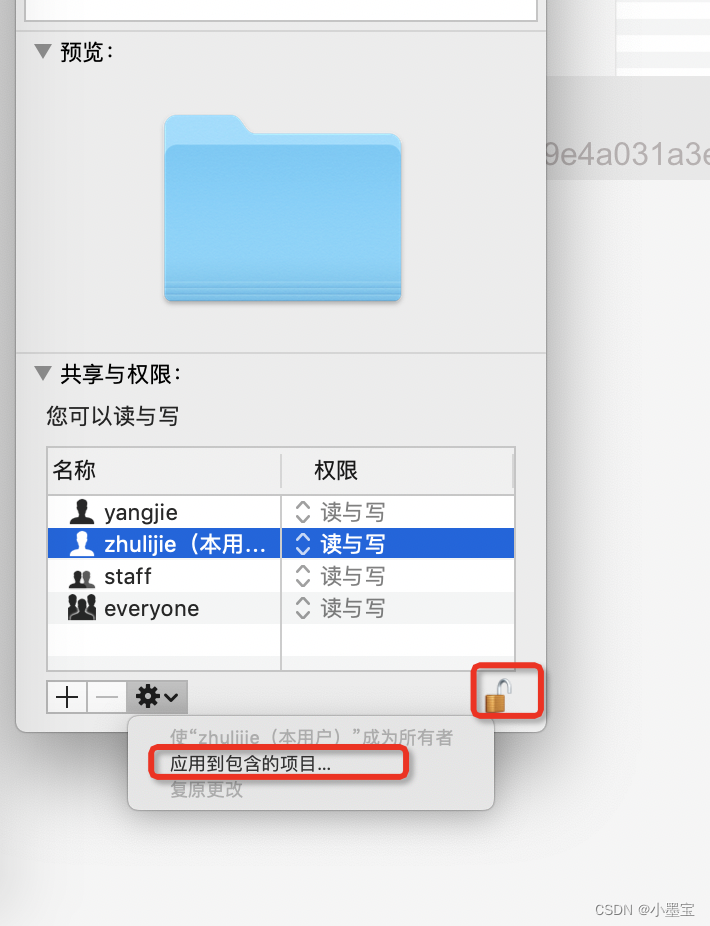
vscode 保存 “index.tsx“失败: 权限不足。选择 “以超级用户身份重试“ 以超级用户身份重试。
vscode 保存 "index.tsx"失败: 权限不足。选择 “以超级用户身份重试” 以超级用户身份重试。 操作:mac在文件夹中创建文件,sudo 创建umiJs项目 解决:修改文件夹权限 右键文件夹...

综合性练习
名片管理系统 综合性项目实现—详细请点这里 dict {} # 定义一个空字典,用于存储信息。 list [] # 定义一个列表,存储name值 list1 [] #存储age值 list2 [] #存储phone值 def people_tips(): #提示print("*****" * 10)print("…...
threejs(7)-精通粒子特效
一、初识Points与点材质 // 设置点材质 const pointsMaterial new THREE.PointsMaterial(); import * as THREE from "three"; // 导入轨道控制器 import { OrbitControls } from "three/examples/jsm/controls/OrbitControls"; // 导入动画库 import gsa…...

使用了百度OCR,记录一下
由于识别ocr有的频率不高,图片无保密性需求,也不想太大的库, 就决定还是用下api算了,试用了几家,决定用百度的ocr包,相对简单。 遇到的问题里面下列基本有提到:例如获取ID,KEY&…...
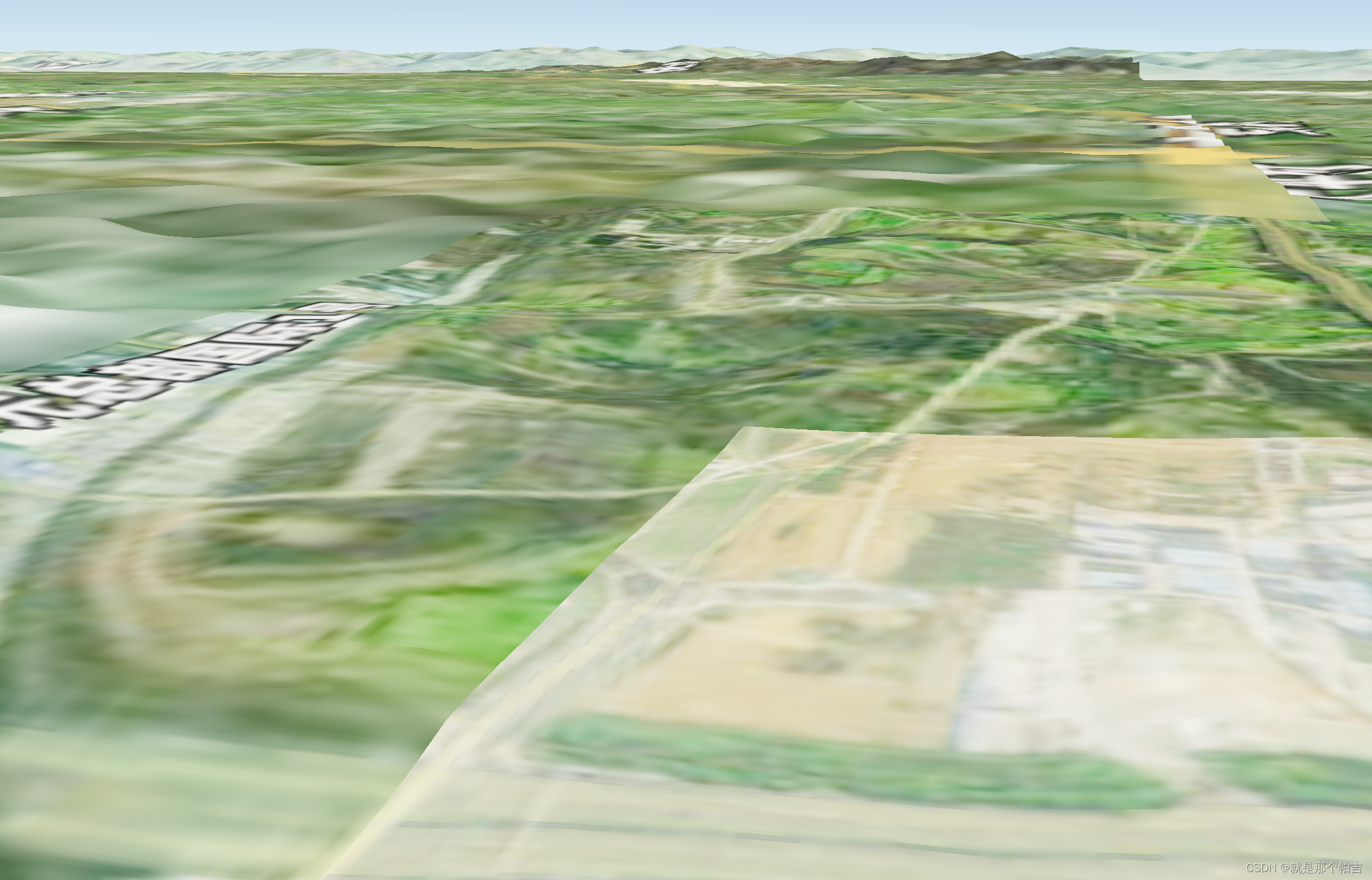
5.OsgEarth加载地形
愿你出走半生,归来仍是少年! 在三维场景中除了使用影像体现出地貌情况,还需要通过地形体现出地势起伏,还原一个相对真实的三维虚拟世界。 osgEarth可通过直接加载Dem数据进行场景内的地形构建。 1.数据准备 由于我也没有高程数据,…...

基于回溯搜索算法的无人机航迹规划-附代码
基于回溯搜索算法的无人机航迹规划 文章目录 基于回溯搜索算法的无人机航迹规划1.回溯搜索搜索算法2.无人机飞行环境建模3.无人机航迹规划建模4.实验结果4.1地图创建4.2 航迹规划 5.参考文献6.Matlab代码 摘要:本文主要介绍利用回溯搜索算法来优化无人机航迹规划。 …...
微信小程序云开发笔记-初始化商城小程序
缘起:由于痴迷机器人,店都快倒闭了,没办法,拿出点精力给店里搞个小程序,要多卖货才能活下来搞机器人,在此记录一下搞小程序的过程,要不然搞完又忘了。腾讯的云开发,前端和后端都有了…...
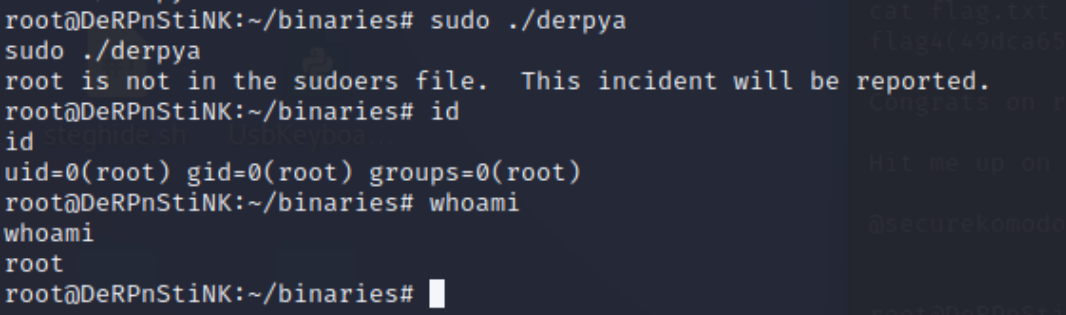
vulnhub_DeRPnStiNK靶机渗透测试
VulnHub2018_DeRPnStiNK靶机 https://www.vulnhub.com/entry/derpnstink-1,221/ flag1(52E37291AEDF6A46D7D0BB8A6312F4F9F1AA4975C248C3F0E008CBA09D6E9166) flag2(a7d355b26bda6bf1196ccffead0b2cf2b81f0a9de5b4876b44407f1dc07e51e6) flag4(49dca65f362fee401292ed7ada96f9…...

网站如何判断请求是来自手机-移动端还是PC-电脑端?如何让网站能适应不同的客户端?
如果网站需要实现手机和PC双界面适应,可以有两种方式: 第一种是响应式界面,根据屏幕宽度来判定显示的格式。这种需要前端来做,手机/PC共用一套代码,有一定的局限性。 第二种是后端通过request请求头中的内容来分析客户…...

sass和 scss的区别?
Sass(Syntactically Awesome Style Sheets)和 SCSS(Sassy CSS)是两种流行的 CSS 预处理器,它们扩展了普通的 CSS 语法,提供了更多的功能和便利性。下面是 Sass 和 SCSS 的主要区别: 1ÿ…...
Vuex 动态模块状态管理器
模块化思想 我们之前的博文已经讲述了Vuex怎么使用命名空间实现模块化状态管理。详情可以看: Vuex命名空间及如何获取根模块、兄弟模块状态管理器_AI3D_WebEngineer的博客-CSDN博客https://blog.csdn.net/weixin_42274805/article/details/133269196?ops_request_…...
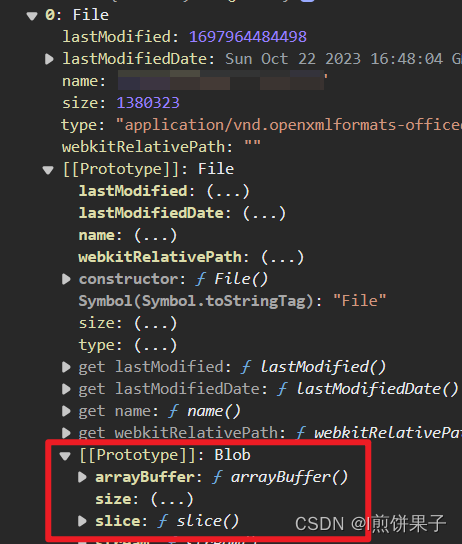
实现分片上传、断点续传、秒传 (JS+NodeJS)(TypeScript)
一、引入及效果 上传文件是一个很常见的操作,但是当文件很大时,上传花费的时间会非常长,上传的操作就会具有不确定性,如果不小心连接断开,那么文件就需要重新上传,导致浪费时间和网络资源。 所以࿰…...
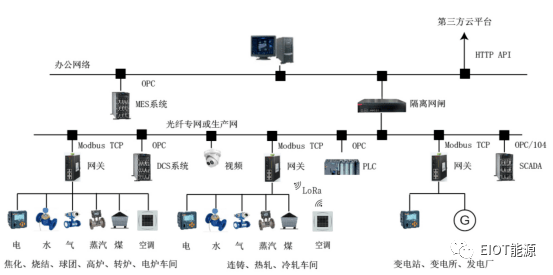
浅谈安科瑞EMS能源管控平台建设的意义-安科瑞 蒋静
摘 要:能源消耗量大、能源运输供给不足、环境压力日趋增加、能耗双控等一系列问题一直困扰着钢铁冶金行业,制约着企业快速稳定健康发展。本文介绍的安科瑞EMS能源管控平台,采用自动化、信息化技术,实现从能源数据采集、过程监控、…...

【原创】指针变量作为函数参数要点注意+main函数中值是否改变
指针变量作为函数参数要点注意(已写至笔记) 1传参指针不加*(main中函数) 2收参指针要加*(被main调用的函数) 3传参指针名可与收参指针名不同,不影响 4【问】如何看主函数中指针所指内容是否改变…...
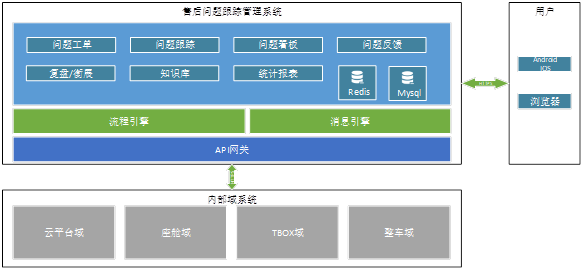
售后处置跟踪系统设想
售后处置跟踪系统设想 前言 随着汽车工业的发展,软件定义车的模式已成为主流汽车设计及智能化功能架构模式,通过引入SOA的软件架构设计,使得现有的座舱软件、云端服务软件、App软件等众多功能模块的版本迭代频次日新月异,发版更…...

python实现ModBusTCP协议的server
python实现ModBusTCP协议的server是一件简单的事情,只要通过pymodbus、pyModbusTCP等模块都可以实现,本文采用pymodbus。 相关文章见: python实现ModBusTCP协议的client-CSDN博客 一、了解pymodbus的Server 1、pymodbus.server的模块 pym…...

AndroidStudio编译错误‘android.injected.build.density‘ is deprecated
问题 AndroidStudio编译错误 The option ‘android.injected.build.density’ is deprecated. It was removed in version 8.0 of the Android Gradle plugin. Density property injection from Android Studio has been removed. 解决 app/build.gradle 中这行 apply plugi…...

基于KS距离度量交通流分布偏移:提升DRL交通信号控制鲁棒性的工程实践
1. 项目概述与核心挑战在智能交通系统(ITS)领域,基于深度强化学习(DRL)的交通信号控制(Traffic Signal Control)正从研究走向实际部署。作为一名长期关注AI落地应用的从业者,我见过太…...

量子机器学习与傅里叶分析:革新期权定价的混合计算范式
1. 项目概述:当量子机器学习遇见金融定价在金融工程的核心地带,期权定价一直是个计算密集型的硬骨头。传统的蒙特卡洛模拟虽然通用,但为了达到足够的精度,动辄需要百万甚至千万次的路径模拟,计算成本高昂。近年来&…...
)
保姆级教程:手把手教你搞定ESXi 6.7安装前的BIOS设置(VT-x/VT-d/AES全开)
从零开始:ESXi 6.7安装前的BIOS设置终极指南当你第一次接触企业级虚拟化平台时,那种既兴奋又忐忑的心情我完全理解。作为过来人,我记得自己第一次在Dell PowerEdge服务器上安装ESXi时,光是搞清楚BIOS里那些晦涩的选项就花了整整一…...

手机也能玩转无人机仿真:用安卓QGC App连接同一WiFi下的PX4 JMAVSim模拟器
手机也能玩转无人机仿真:用安卓QGC App连接同一WiFi下的PX4 JMAVSim模拟器 无人机开发者和爱好者们,是否曾想过用手机就能完成整个无人机仿真测试流程?告别笨重的电脑束缚,只需一部安卓设备,就能在沙发上调试飞控算法。…...

Linux平台终极Jellyfin客户端:如何用Tsukimi打造专业级媒体中心体验?
Linux平台终极Jellyfin客户端:如何用Tsukimi打造专业级媒体中心体验? 【免费下载链接】tsukimi A simple third-party Jellyfin client for Linux 项目地址: https://gitcode.com/gh_mirrors/ts/tsukimi 你是否厌倦了网页版Jellyfin的笨重体验&am…...

为什么你的霓虹总像“塑料灯带”?Midjourney光子散射模拟缺陷曝光:3个被官方隐瞒的--sref调参禁区
更多请点击: https://kaifayun.com 第一章:为什么你的霓虹总像“塑料灯带”? 霓虹效果在现代 UI 设计中无处不在——按钮悬停、加载指示器、焦点高亮……但多数实现却流于表面:生硬的 box-shadow、固定色值的渐变边框、缺乏物理感…...
)
DeepSeek代码审查能力白皮书(2024企业级实测报告)
更多请点击: https://kaifayun.com 第一章:DeepSeek代码审查能力白皮书(2024企业级实测报告)概述 本报告基于2024年Q1至Q3期间,面向金融、电信与云原生三大垂直行业的17家头部企业客户开展的深度实测,覆盖…...

关于内卷,几个值得深想的洞察
首先声明:这篇不劝躺平,也不教内卷——只是想说清楚,你到底在一个什么样的游戏里。 你以为内卷是“资源不足”,其实是“分配方式” 很多人对内卷有个本质上的认知错误:以为内卷是因为资源不够,大家为了抢资…...

谷歌CEO承认Coding落后了
梦瑶 发自 凹非寺量子位 | 公众号 QbitAI谷歌CEO皮查伊这次真没藏着掖着,直接一个真心话大放送了:在Coding这事儿上,我们家Gemini确实有点了落后哈…..(Gemini:怎么这话还从我自家老板嘴里说出来了呢!&…...

WSABuilds安装挑战:从“包注册失败“到“架构不匹配“的完整解决指南
WSABuilds安装挑战:从"包注册失败"到"架构不匹配"的完整解决指南 【免费下载链接】WSABuilds Run Windows Subsystem For Android on your Windows 10 and Windows 11 PC using prebuilt binaries with Google Play Store (MindTheGapps) and/o…...