轨迹规划 | 图解路径跟踪PID算法(附ROS C++/Python/Matlab仿真)
目录
- 0 专栏介绍
- 1 PID控制基本原理
- 2 基于PID的路径跟踪
- 3 仿真实现
- 3.1 ROS C++实现
- 3.2 Python实现
- 3.3 Matlab实现
0 专栏介绍
🔥附C++/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(贝塞尔曲线、B样条曲线等)。
🚀详情:图解自动驾驶中的运动规划(Motion Planning),附几十种规划算法
1 PID控制基本原理
PID控制是一种常用的经典控制算法,其应用背景广泛,例如
- 工业自动化控制:温度控制、压力控制、流量控制、液位控制等过程控制系统多采用PID闭环,可以帮助维持系统参数在设定值附近,以提高生产过程的稳定性和效率;
- 机械工程:PID算法可用于实现精确的运动控制,包括控制位置、速度和力。这包括机器人控制、电机控制、汽车巡航控制等;
- 农业自动化:PID算法可用于控制温室环境,包括温度、湿度和光照,以促进植物的生长和提高农业生产;
- …
PID代表比例(Proportional)、积分(Integral)和微分(Derivative),它通过根据误差信号的大小和变化率来调整控制器的输出,以使系统的输出尽可能接近期望值,其控制框图如下所示

连续型PID控制律如下
u ( t ) = K p e ( t ) + K i ∫ t 0 t e ( τ ) d τ + K d e ˙ ( t ) u\left( t \right) =K_pe\left( t \right) +K_i\int_{t_0}^t{e\left( \tau \right) \mathrm{d}\tau}+K_d\dot{e}\left( t \right) u(t)=Kpe(t)+Ki∫t0te(τ)dτ+Kde˙(t)
其中 K p K_p Kp、 K i K_i Ki、 K d K_d Kd分别称为比例、积分与微分增益系数
位置式离散型PID控制律如下
u ( k ) = K p e ( k ) + K i ∑ i = 0 k e ( i ) Δ t + K d ( e ( k ) − e ( k − 1 ) ) / Δ t u\left( k \right) =K_pe\left( k \right) +K_i\sum_{i=0}^k{e\left( i \right) \varDelta t}+K_d{{\left( e\left( k \right) -e\left( k-1 \right) \right)}/{\varDelta t}} u(k)=Kpe(k)+Kii=0∑ke(i)Δt+Kd(e(k)−e(k−1))/Δt
由于位置式PID算法需要计算累计偏差,占用存储单元,可以通过
u ( k ) − u ( k − 1 ) u\left( k \right) -u\left( k-1 \right) u(k)−u(k−1)
计算增量式PID控制律
Δ u ( k ) = K p Δ e ( k ) + K i e ( k ) Δ t + K d ( Δ e ( k ) − Δ e ( k − 1 ) ) / Δ t \varDelta u\left( k \right) =K_p\varDelta e\left( k \right) +K_ie\left( k \right) \varDelta t+K_d{{\left( \varDelta e\left( k \right) -\varDelta e\left( k-1 \right) \right)}/{\varDelta t}} Δu(k)=KpΔe(k)+Kie(k)Δt+Kd(Δe(k)−Δe(k−1))/Δt
其中
Δ u ( k ) = u ( k ) − u ( k − 1 ) Δ e ( k ) = e ( k ) − e ( k − 1 ) \varDelta u\left( k \right) =u\left( k \right) -u\left( k-1 \right) \\ \varDelta e\left( k \right) =e\left( k \right) -e\left( k-1 \right) Δu(k)=u(k)−u(k−1)Δe(k)=e(k)−e(k−1)
2 基于PID的路径跟踪
在基于PID的局部路径规划中,希望机器人能快速跟踪上预设的轨迹,设误差量为 e k e_k ek。 e k e_k ek可以根据实际的控制目标进行选择,例如线速度误差、角速度误差、轨迹跟踪误差等
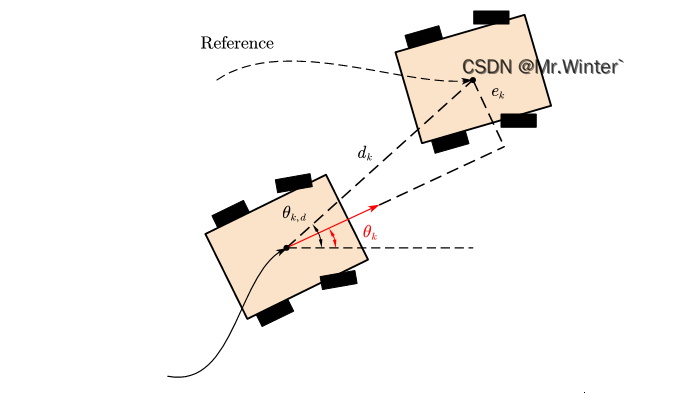
以轨迹跟踪误差为例,如图所示,根据几何关系可得
e k = sin ( θ k , d − θ k ) ⋅ d k e_k=\sin \left( \theta _{k,d}-\theta _k \right) \cdot d_k ek=sin(θk,d−θk)⋅dk
其中
θ k , d = a tan ( y k , d − y k , x k , d − x k ) d k = ( x k , d − x k ) 2 + ( y k , d − y k ) 2 \theta _{k,d}=\mathrm{a}\tan \left( y_{k,d}-y_k,x_{k,d}-x_k \right) \\ d_k=\sqrt{\left( x_{k,d}-x_k \right) ^2+\left( y_{k,d}-y_k \right) ^2} θk,d=atan(yk,d−yk,xk,d−xk)dk=(xk,d−xk)2+(yk,d−yk)2
接着以该误差作为反馈测量值通过PID控制器生成控制量,机器人基于控制量和运动学模型运动,循环往复直到机器人完成控制目标
3 仿真实现
3.1 ROS C++实现
核心的线速度PID控制和角速度PID控制代码如下
double PIDPlanner::LinearPIDController(nav_msgs::Odometry& base_odometry, double b_x_d, double b_y_d)
{double v = std::hypot(base_odometry.twist.twist.linear.x, base_odometry.twist.twist.linear.y);double v_d = std::hypot(b_x_d, b_y_d) / d_t_;if (std::fabs(v_d) > max_v_)v_d = std::copysign(max_v_, v_d);double e_v = v_d - v;i_v_ += e_v * d_t_;double d_v = (e_v - e_v_) / d_t_;e_v_ = e_v;double v_inc = k_v_p_ * e_v + k_v_i_ * i_v_ + k_v_d_ * d_v;if (std::fabs(v_inc) > max_v_inc_)v_inc = std::copysign(max_v_inc_, v_inc);double v_cmd = v + v_inc;if (std::fabs(v_cmd) > max_v_)v_cmd = std::copysign(max_v_, v_cmd);else if (std::fabs(v_cmd) < min_v_)v_cmd = std::copysign(min_v_, v_cmd);return v_cmd;
}
double PIDPlanner::AngularPIDController(nav_msgs::Odometry& base_odometry, double e_theta)
{regularizeAngle(e_theta);double w_d = e_theta / d_t_;if (std::fabs(w_d) > max_w_)w_d = std::copysign(max_w_, w_d);double w = base_odometry.twist.twist.angular.z;double e_w = w_d - w;i_w_ += e_w * d_t_;double d_w = (e_w - e_w_) / d_t_;e_w_ = e_w;double w_inc = k_w_p_ * e_w + k_w_i_ * i_w_ + k_w_d_ * d_w;if (std::fabs(w_inc) > max_w_inc_)w_inc = std::copysign(max_w_inc_, w_inc);double w_cmd = w + w_inc;if (std::fabs(w_cmd) > max_w_)w_cmd = std::copysign(max_w_, w_cmd);else if (std::fabs(w_cmd) < min_w_)w_cmd = std::copysign(min_w_, w_cmd);return w_cmd;
}

3.2 Python实现
主体控制流程如下:
def plan(self):plan_idx = 0for _ in range(self.max_iter):# break until goal reachedif math.hypot(self.robot.px - self.goal[0], self.robot.py - self.goal[1]) < self.p_precision:return True, self.robot.history_pose# find next tracking pointwhile plan_idx < len(self.path):...# calculate velocity commandif math.hypot(self.robot.px - self.goal[0], self.robot.py - self.goal[1]) < self.p_precision:if abs(self.robot.theta - self.goal[2]) < self.o_precision:u = np.array([[0], [0]])else:u = np.array([[0], [self.angularController(self.goal[2])]])elif abs(theta_d - self.robot.theta) > np.pi / 2:u = np.array([[0], [self.angularController(theta_d)]])else:v_d = math.hypot(b_x_d, b_y_d) / self.dt / 10u = np.array([[self.linearController(v_d)], [self.angularController(theta_d)]])# feed into robotic kinematicself.robot.kinematic(u, self.dt)return False, None

3.3 Matlab实现
核心的线速度PID控制和角速度PID控制代码如下
function [v, e_v_, i_v_] = linearController(robot, b_x_d, b_y_d, dt, e_v_, i_v_)v_d = norm([b_x_d, b_y_d]) / dt / 10;e_v = v_d - robot.v;i_v_ = i_v_ + e_v * dt;d_v = (e_v - e_v_) / dt;e_v_ = e_v;k_v_p = 1.00;k_v_i = 0.00;k_v_d = 0.00;v_inc = k_v_p * e_v_ + k_v_i * i_v_ + k_v_d * d_v;v = robot.v + v_inc;
end
function [w, e_w_, i_w_] = angularController(robot, theta_d, dt, e_w_, i_w_)e_theta = theta_d - robot.theta;if (e_theta > pi)e_theta = e_theta - 2 * pi;elseif (e_theta < -pi)e_theta = e_theta + 2 * pi;endw_d = e_theta / dt / 10;e_w = w_d - robot.w;i_w_ = i_w_ + e_w * dt;d_w = (e_w - e_w_) / dt;e_w_ = e_w;k_w_p = 1.00;k_w_i = 0.00;k_w_d = 0.01;w_inc = k_w_p * e_w_ + k_w_i * i_w_ + k_w_d * d_w;w = robot.w + w_inc;
end

完整工程代码请联系下方博主名片获取
🔥 更多精彩专栏:
- 《ROS从入门到精通》
- 《Pytorch深度学习实战》
- 《机器学习强基计划》
- 《运动规划实战精讲》
- …
相关文章:
轨迹规划 | 图解路径跟踪PID算法(附ROS C++/Python/Matlab仿真)
目录 0 专栏介绍1 PID控制基本原理2 基于PID的路径跟踪3 仿真实现3.1 ROS C实现3.2 Python实现3.3 Matlab实现 0 专栏介绍 🔥附C/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等)&a…...
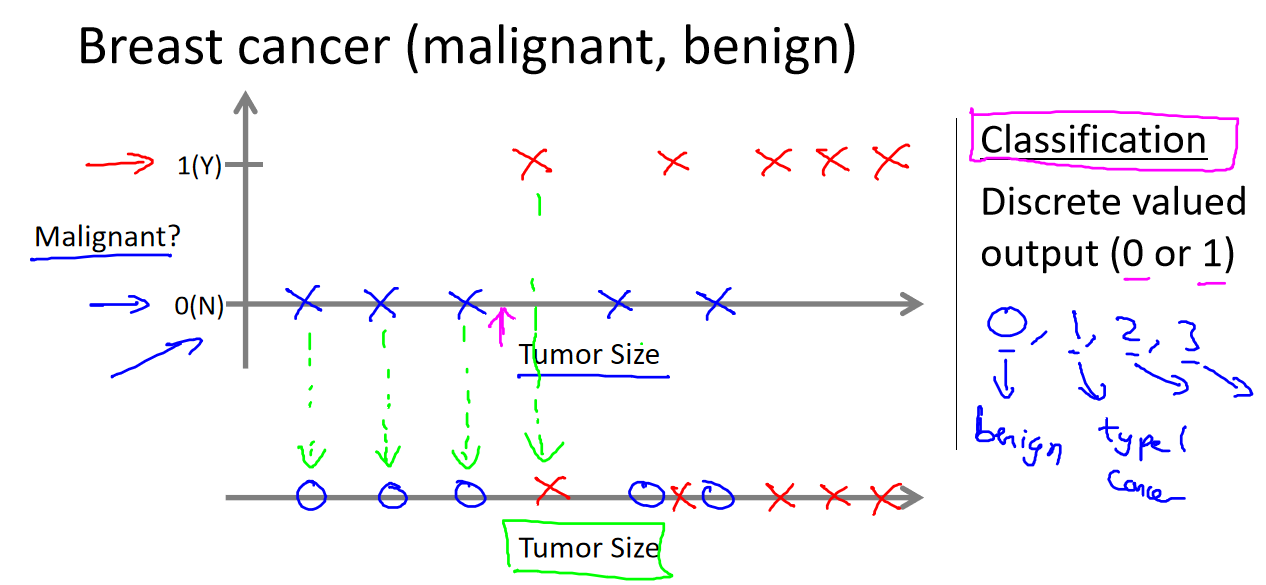
吴恩达《机器学习》1-3:监督学习
一、监督学习 例如房屋价格的数据集。在监督学习中,我们将已知的房价作为"正确答案",并将这些价格与房屋的特征数据一起提供给学习算法。学习算法使用这些已知答案的数据来学习模式和关系,以便在未知情况下预测其他房屋的价格。这就…...
Flutter PopupMenuButton下拉菜单
下拉菜单是移动应用交互中一种常见的交互方式,可以使用下拉列表来展示多个内容标签,实现页面引导的作用。在Flutter开发中,实现下拉弹框主要有两种方式,一种是继承Dialog组件使用自定义布局的方式实现,另一种则是使用官方的PopupMenuButton组件进行实现。 如果没有特殊的…...
国家数据局正式揭牌,数据专业融合型人才迎来发展良机【文末送书五本】
国家数据局正式揭牌,数据专业融合型人才迎来发展良机 国家数据局正式揭牌,数据专业融合型人才迎来发展良机 摘要书籍简介数据要素安全流通Python数据挖掘:入门、进阶与实用案例分析数据保护:工作负载的可恢复性Data Mesh权威指南分…...
H5游戏源码分享-像素小鸟游戏(类似深海潜艇)
H5游戏源码分享-像素小鸟游戏(类似深海潜艇) 点击屏幕控制小鸟的飞行高度 整个小游戏就用JS完成 项目地址:https://download.csdn.net/download/Highning0007/88483228 <!DOCTYPE HTML> <html><head><meta http-equiv…...

Vue 3 响应式对象:ref 和 reactive 的使用和区别
🎉🎉欢迎来到我的CSDN主页!🎉🎉 🏅我是尘缘,一个在CSDN分享笔记的博主。📚📚 👉点击这里,就可以查看我的主页啦!👇&#x…...
H5游戏源码分享-密室逃脱小游戏(考验反应能力)
H5游戏源码分享-密室逃脱小游戏(考验反应能力) 预判安全位置,这个需要快速的反应能力 源码 <!DOCTYPE html> <html> <head> <meta http-equiv"Content-Type" content"text/html; charsetutf-8" /&…...
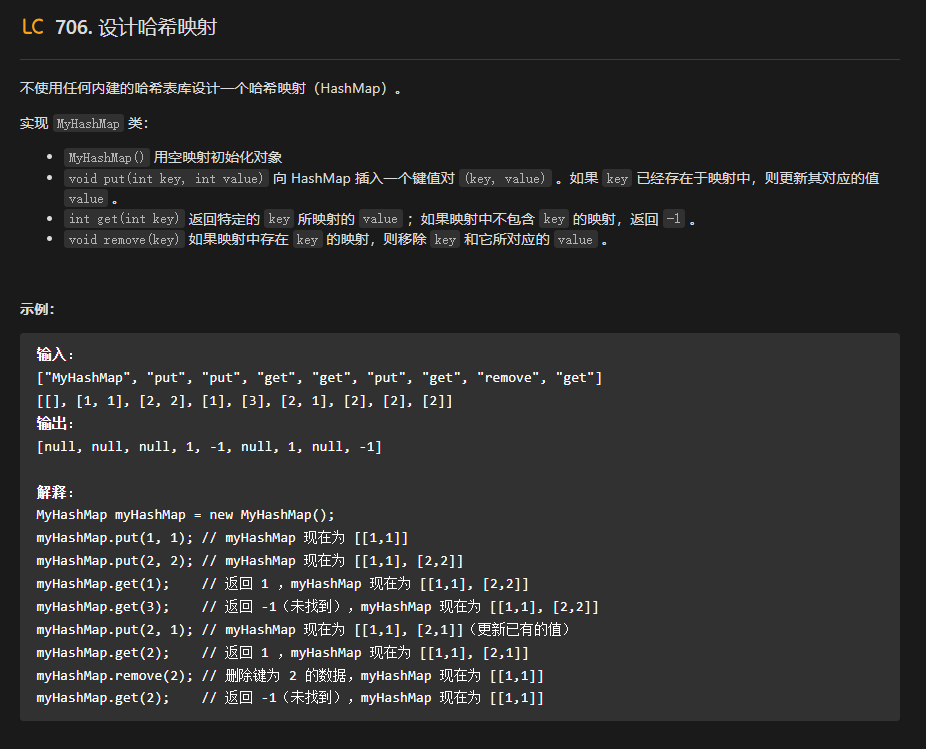
【LeetCode刷题-哈希】--706.设计哈希映射
706.设计哈希映射 class MyHashMap {private class Pair{private int key;private int value;public Pair(int key ,int value){this.key key;this.value value;}public int getKey(){return key;}public int getValue(){return value;}public void setValue(int value){this…...

前端 : 用HTML ,CSS ,JS 做一个点名器
1.HTML: <body><div id "content"><div id"top"><div id "name">XAiot2302班点名器</div></div><div id "center"><div id "word">你准备好了吗?</di…...
css:button实现el-radio效果
先看最终效果: 思路: 一、 首先准备好按钮内容:const a [one,two,three] 将按钮循环展示出来,并设置一些样式,将按钮背景透明: <button v-for"(item,index) in a" :key"in…...

算法工程师-机器学习-数据科学家面试准备4-ML系统设计
https://github.com/LongxingTan/Machine-learning-interview 算法工程师-机器学习-数据科学家面试准备1- 概述 外企和国外公司、春招、秋招算法工程师-机器学习-数据科学家面试准备2- Leetcode 300算法工程师-机器学习-数据科学家面试准备3-系统设计算法工程师-机器学习-数据…...

git重装后如何连接以前项目
git重装后如何连接以前项目 1、配置秘钥 点击 Git Bash Here,进入命令操作窗口 生成本地git仓库秘钥: 1、填写自己邮箱 2、一直回车 ssh-keygen -t rsa -C “xxxxxqq.com”3、使用cat查看生成的秘钥,粘贴并设置到gitee上 cat ~/.ssh/id_r…...
【java学习—十】TreeSet集合(5)
文章目录 1. TreeSet1.1. 自然排序1.2. 定制排序 1. TreeSet TreeSet 是 SortedSet 接口的实现类, TreeSet 可以确保集合元素处于排序状态。 TreeSet 支持两种排序方法:自然排序和定制排序。默认情况下, TreeSet 采用自然排序。 1.1.…...
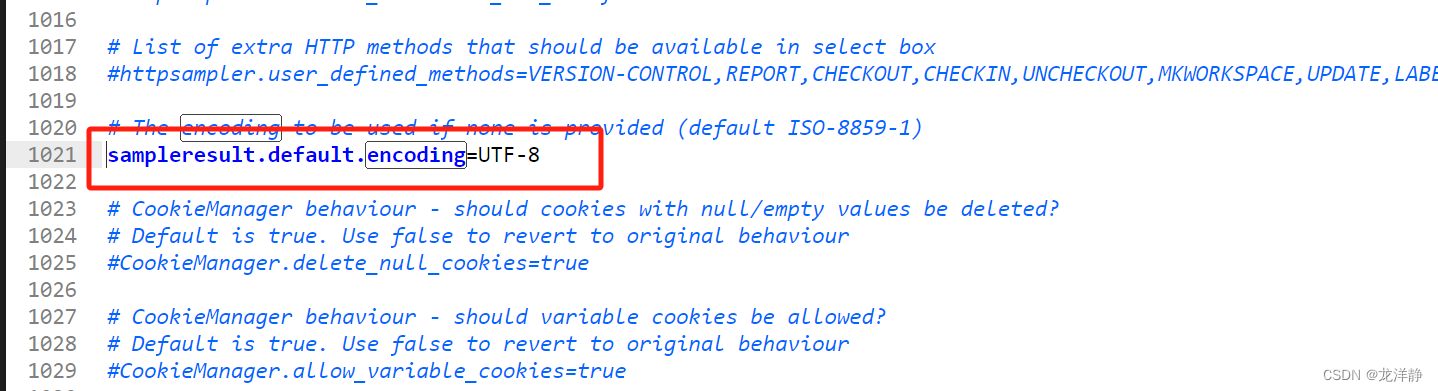
JMeter的使用,傻瓜式学习【上】
目录 前言 1、JMeter元件及基本使用作用域(简述) 1.1、基本元件 1.2、作用域的原则 1.3、元件执行顺序 3、JMeter三个重要组件 3.1、线程组 案例: 3.2、HTTP请求 3.3、查看结果树 响应体中,中文乱码解决方案࿱…...
)
主定理(一般式)
主定理(Master Theorem)是用于分析递归算法时间复杂度的一个重要工具。它适用于形式化定义的一类递归关系,通常采用分治策略解决问题的情况。 目录 主定理简化版的局限主定理一般形式情况1: n l o g b a n^{log_{b}{a}} nlogba …...
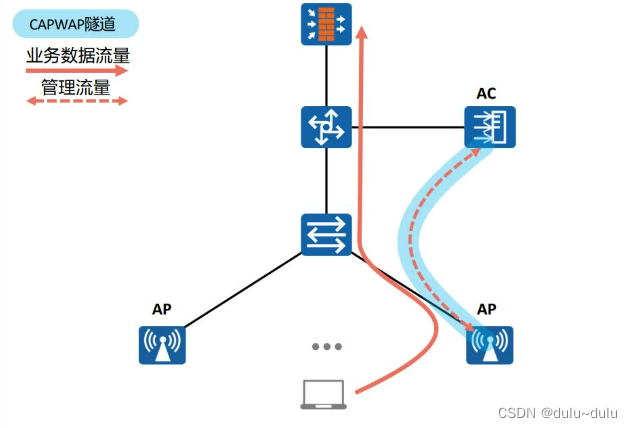
WLAN的组网架构和工作原理
目录 WLAN的组网架构 FAT AP架构 AC FIT AP架构 敏捷分布式AP 下一代园区网络:智简园区(大中型园区网络) WLAN工作原理 WLAN工作流程 1.AP上线 (1)AP获取IP地址; (2)AP发…...
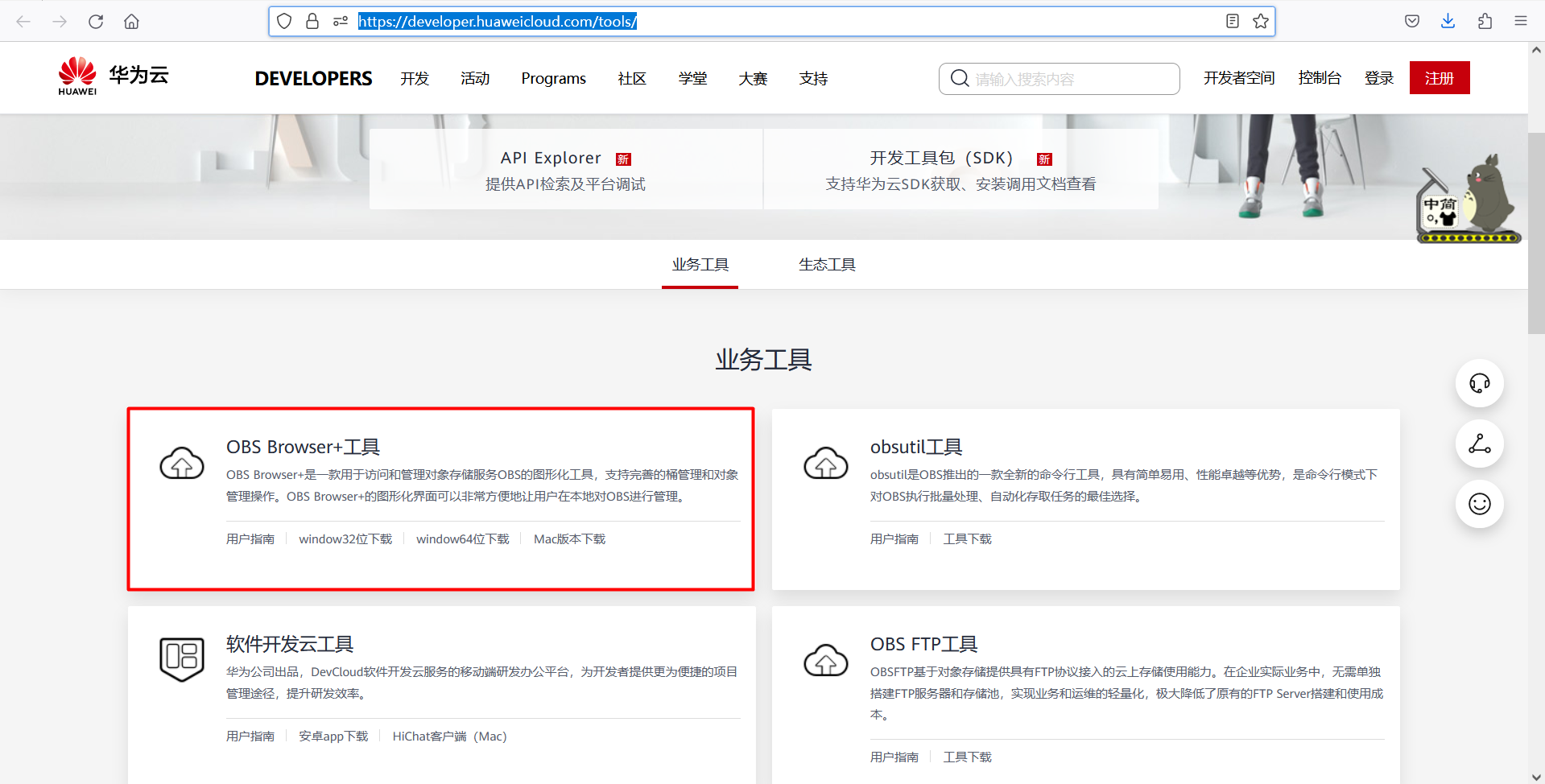
使用OBS Browser+访问华为云OBS存储【Windows】
背景 项目中使用华为云 S3 存储,java 代码中通过华为云 OBS 提供的esdk-obs-java 来访问文件。 但是,通过 JAVA SDK 方式不太方便运维,所以我们需要一款可视化的客户端软件。 华为云 OBS 自身也提供了一款客户端软件,名为 OBS Browser+。 OBS Browser+简介 OBS Browse…...
:类的动态内存分配、异常、类型转换运算符)
C++总结(3):类的动态内存分配、异常、类型转换运算符
文章目录 1 类的动态内存分配1.1 C动态内存分配1.2 拷贝构造函数1.3 赋值运算符(operator)重载 2 异常3 类型转换运算符 1 类的动态内存分配 1.1 C动态内存分配 在C/C中都可以使用malloc/free来分配内存,但C还有一种更好的方法:new和delete。下面以动态…...
)
折半搜索(meet in the middle)
介绍 折半搜索,又称 meet in the middle \text{meet in the middle} meet in the middle,指将整个搜索过程分为两部分,并对两部分分别进行搜索,最后得到两个答案序列,将这两个答案序列进行合并,即可得到最…...
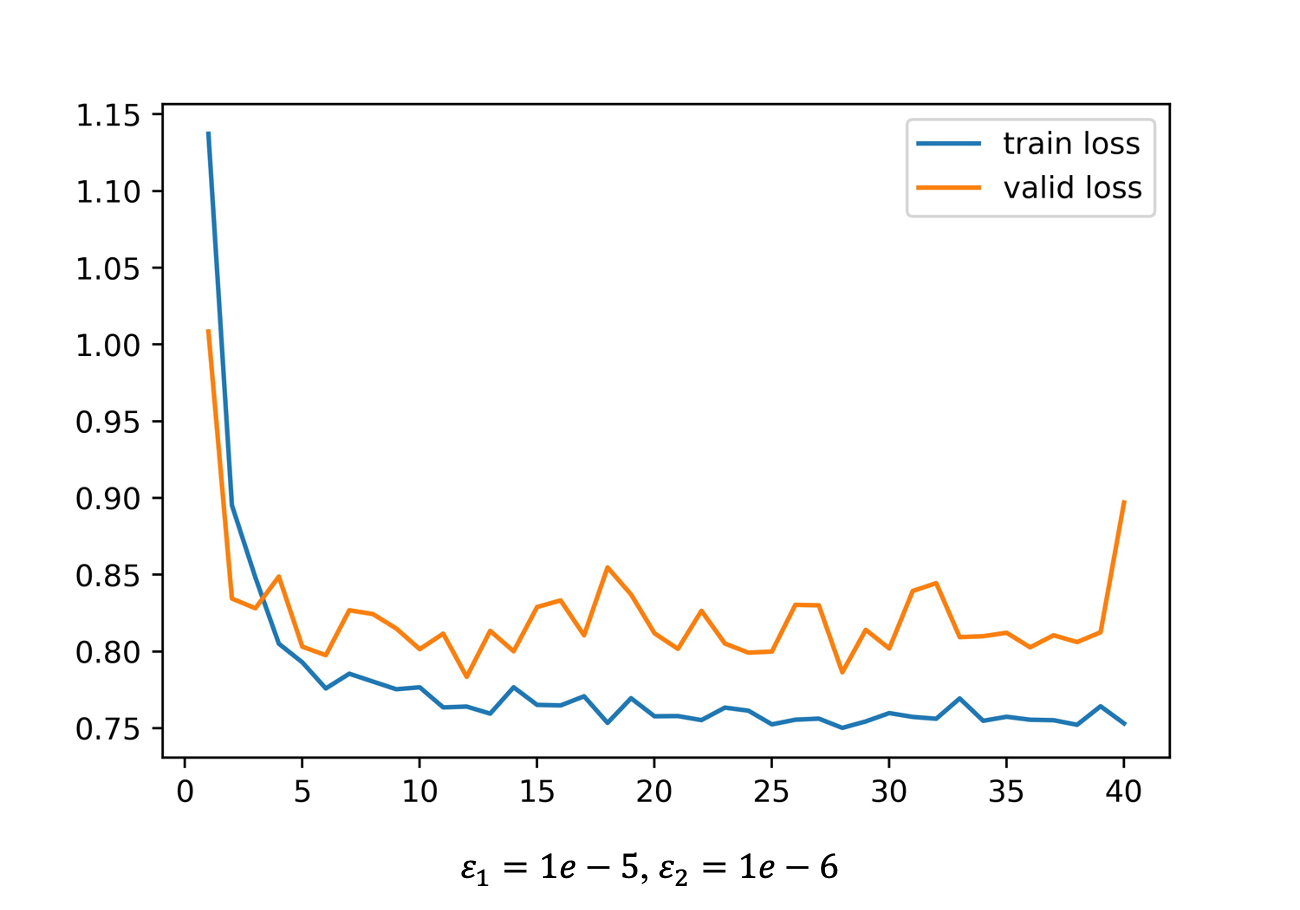
【机器学习】loss损失讨论
大纲 验证集loss上升,准确率也上升(即将overfitting?)训练集loss一定为要为0吗 Q1. 验证集loss上升,准确率也上升 随着置信度的增加,一小部分点的预测结果是错误的(log lik 给出了指数级的惩…...

基于RT-Thread与HMI-BOARD的直线推杆智能测试系统设计与实现
1. 项目概述与核心价值在工业自动化领域,直线推杆作为一种常见的执行机构,广泛应用于医疗床、升降桌、工业阀门、农业机械等设备中。一个推杆从设计图纸到批量生产,中间有一个至关重要的环节:寿命与可靠性测试。传统的测试方案&am…...

Spek音频频谱分析器:3分钟掌握专业音频分析技术
Spek音频频谱分析器:3分钟掌握专业音频分析技术 【免费下载链接】spek Acoustic spectrum analyser 项目地址: https://gitcode.com/gh_mirrors/sp/spek 音频频谱分析是理解音频文件内在结构的关键技术,而Spek正是这一领域的专业工具。这款免费开…...

如何在5分钟内掌握BilibiliDown:B站视频下载神器完整使用指南
如何在5分钟内掌握BilibiliDown:B站视频下载神器完整使用指南 【免费下载链接】BilibiliDown (GUI-多平台支持) B站 哔哩哔哩 视频下载器。支持稍后再看、收藏夹、UP主视频批量下载|Bilibili Video Downloader 😳 项目地址: https://gitcode.com/gh_mi…...

NoFences:完全免费的Windows桌面分区工具终极指南
NoFences:完全免费的Windows桌面分区工具终极指南 【免费下载链接】NoFences 🚧 Open Source Stardock Fences alternative 项目地址: https://gitcode.com/gh_mirrors/no/NoFences 还在为杂乱的Windows桌面而烦恼吗?每天在散落各处的…...

自建Vaultwarden密码服务器:Docker部署与安全实践指南
1. 项目概述:自建密码管理服务器的核心价值在数字化生活成为常态的今天,我们每个人都被数十甚至上百个账号密码所包围。从工作邮箱到社交媒体,从银行账户到流媒体订阅,管理这些凭证早已超出了人脑的记忆极限。于是,密码…...

android C++降低图片亮度 opencv 效果
需要注意的:如果是4通道,那么需要转换成3通道,处理完以后转换回去RGBA格式...

Cursor智能体工具包:从AI编程助手到自主规划开发伙伴
1. 项目概述:一个为AI编程助手赋能的智能工具包如果你和我一样,日常重度依赖Cursor这类AI编程助手,那你肯定也经历过这样的时刻:面对一个复杂的重构任务,你不得不把需求拆成十几条指令,一条条喂给AI&#x…...

深度学习模型边缘部署技术与优化实践
1. 深度学习模型边缘部署的技术全景在计算机视觉和自然语言处理领域,深度学习模型的边缘部署正经历着从理论到实践的深刻变革。与传统的云端部署相比,边缘部署将计算能力下沉到终端设备,实现了数据处理的本土化。这种转变不仅大幅降低了网络延…...

2026年跨行业通吃的经管类黄金证书推荐
在数字经济纵深发展与人工智能技术广泛渗透的2026年,经济管理领域的人才需求范式发生了结构性转变。传统的单一专业技能边界日益模糊,企业对具备数据驱动决策、跨领域协同与敏捷管理能力的复合型人才需求迫切。在此背景下,系统性获取权威职业…...

手把手教你用LabelImg标注自己的数据集:从哆啦A梦到实战项目的YOLOv5训练准备
从哆啦A梦到工业级应用:LabelImg数据标注与YOLOv5训练全流程实战 在计算机视觉领域,数据标注的质量往往决定了模型性能的上限。就像建筑需要坚实的地基一样,一个优秀的YOLOv5模型离不开精心准备的数据集。本文将带您从零开始,通过…...