目标检测理论知识
目标检测
1.基本概念
目标检测(Object Detection)的任务是找出图像中所有感兴趣的目标(物体),确定它们的类别和位置,是计算机视觉领域的核心问题之一。由于各类物体有不同的外观、形状和姿态,加上成像时光照、遮挡等因素的干扰,目标检测一直是计算机视觉领域最具有挑战性的问题。
计算机视觉中关于图像识别有四大类任务:
(1)分类-Classification:解决“是什么?”的问题,即给定一张图片或一段视频判断里面包含什么类别的目标。
(2)定位-Location:解决“在哪里?”的问题,即定位出这个目标的的位置。
(3)检测-Detection:解决“在哪里?是什么?”的问题,即定位出这个目标的位置并且知道目标物是什么。
(4)分割-Segmentation:分为实例的分割(Instance-level)和场景分割(Scene-level),解决“每一个像素属于哪个目标物或场景”的问题。
所以,目标检测是一个分类、回归问题的叠加。
2. 目标检测的核心问题
(1)分类问题:即图片(或某个区域)中的图像属于哪个类别。
(2)定位问题:目标可能出现在图像的任何位置。
(3)大小问题:目标有各种不同的大小。
(4)形状问题:目标可能有各种不同的形状。
3. 目标检测算法分类
基于深度学习的目标检测算法主要分为两类:Two stage和One stage。
1)Tow Stage
先进行区域生成,该区域称之为region proposal(简称RP,一个有可能包含待检物体的预选框),再通过卷积神经网络进行样本分类。
任务流程:特征提取 --> 生成RP --> 分类/定位回归。
常见tow stage目标检测算法有:R-CNN、SPP-Net、Fast R-CNN、Faster R-CNN和R-FCN等。
2)One Stage
不用RP,直接在网络中提取特征来预测物体分类和位置。
任务流程:特征提取–> 分类/定位回归。
常见的one stage目标检测算法有:OverFeat、YOLOv1、YOLOv2、YOLOv3、SSD和RetinaNet等。
目标检测原理
目标检测分为两大系列——RCNN系列和YOLO系列,RCNN系列是基于区域检测的代表性算法,YOLO是基于区域提取的代表性算法,另外还有著名的SSD是基于前两个系列的改进。
1. 候选区域产生
很多目标检测技术都会涉及候选框(bounding boxes)的生成,物体候选框获取当前主要使用图像分割与区域生长技术。区域生长(合并)主要由于检测图像中存在的物体具有局部区域相似性(颜色、纹理等)。目标识别与图像分割技术的发展进一步推动有效提取图像中信息。
1)滑动窗口
通过滑窗法流程图可以很清晰理解其主要思路:首先对输入图像进行不同窗口大小的滑窗进行从左往右、从上到下的滑动。每次滑动时候对当前窗口执行分类器(分类器是事先训练好的)。如果当前窗口得到较高的分类概率,则认为检测到了物体。对每个不同窗口大小的滑窗都进行检测后,会得到不同窗口检测到的物体标记,这些窗口大小会存在重复较高的部分,最后采用非极大值抑制(Non-Maximum Suppression, NMS)的方法进行筛选。最终,经过NMS筛选后获得检测到的物体。
滑窗法简单易于理解,但是不同窗口大小进行图像全局搜索导致效率低下,而且设计窗口大小时候还需要考虑物体的长宽比。所以,对于实时性要求较高的分类器,不推荐使用滑窗法
2)选择性搜索
① 什么是选择性搜索
滑窗法类似穷举进行图像子区域搜索,但是一般情况下图像中大部分子区域是没有物体的。学者们自然而然想到只对图像中最有可能包含物体的区域进行搜索以此来提高计算效率。选择搜索(selective search,简称SS)方法是当下最为熟知的图像bounding boxes提取算法,由Koen E.A于2011年提出。
选择搜索算法的主要思想:图像中物体可能存在的区域应该是有某些相似性或者连续性区域的。因此,选择搜索基于上面这一想法采用子区域合并的方法进行提取bounding boxes。首先,对输入图像进行分割算法产生许多小的子区域。其次,根据这些子区域之间相似性(相似性标准主要有颜色、纹理、大小等等)进行区域合并,不断的进行区域迭代合并。每次迭代过程中对这些合并的子区域做bounding boxes(外切矩形),这些子区域外切矩形就是通常所说的候选框。

② 选择搜索流程
step0:生成区域集R
step1:计算区域集R里每个相邻区域的相似度S={s1, s2,…}
step2:找出相似度最高的两个区域,将其合并为新集,添加进R
step3:从S中移除所有与step2中有关的子集
step4:计算新集与所有子集的相似度
step5:跳至step2,直至S为空
③ 选择搜索优点
计算效率优于滑窗法
由于采用子区域合并策略,所以可以包含各种大小的疑似物体框
合并区域相似的指标多样性,提高了检测物体的概率
2. 数据表示
经过标记后的样本数据如下所示:

预测输出可以表示为:

其中Pc为输出结果的置信概率,bx,by,bw,bh为边框坐标,C1,C2,C3属于某个类别的概率。通过预测结果、实际结果,构建损失函数。损失函数包含了分类、回归两部分组成。
3. 效果评估
使用IoU(Intersection over Union,交并比)来判断模型的好坏。所谓交并比,是指预测边框、实际边框交集和并集的比率,一般约定0.5为一个可以接收的值。
4. 非极大值抑制
预测结果中,可能多个预测结果间存在重叠部分,需要保留交并比最大的、去掉非最大的预测结果,这就是非极大值抑制(Non-Maximum Suppression,简写作NMS)。如下图所示,对同一个物体预测结果包含三个概率0.8/0.9/0.95,经过非极大值抑制后,仅保留概率最大的预测结果。
R-CNN
算法流程
R-CNN(全称Regions with CNN features) ,是R-CNN系列的第一代算法,其实没有过多的使用“深度学习”思想,而是将“深度学习”和传统的“计算机视觉”的知识相结合。比如R-CNN pipeline中的第二步和第四步其实就属于传统的“计算机视觉”技术。使用selective search提取region proposals,使用SVM实现分类

1.候选区域的生成
利用Selective Search算法通过图像分割的方法得到一些原始区域,然后使用一些合并策略将这些区域合并,得到一个层次化的区域结构,而这些结构就包含着可能需要的物体。

2.对每个候选区域,使用深度网络提取特征
将2000候选区域缩放到227*227pixel,接着将候选区域事先训练好的AlexNet CNN网络获取4096维的特征得到2000*4096维矩阵。

3.特征送入每一类的SVM分类器,判断类别
将2000*4096维特征与20个SVM组成的权值矩阵4096*20相乘,获得2000*20维矩阵表示每个建议框是某个目标类别的得分。分别对上述2000*20维矩阵中每一列即每一类进行非极大值抑制剔除重叠建议框,得到该列即该类中得分最高的一些建议框。

在这个图中,2000*4096中4096代表每一个候选框经过CNN网络输出的特征向量,一共有2000个候选框,即为2000*4096;中间部分为SVM权值矩阵,每一列代表一个类别的权值向量,一共有20个,即为4096*20。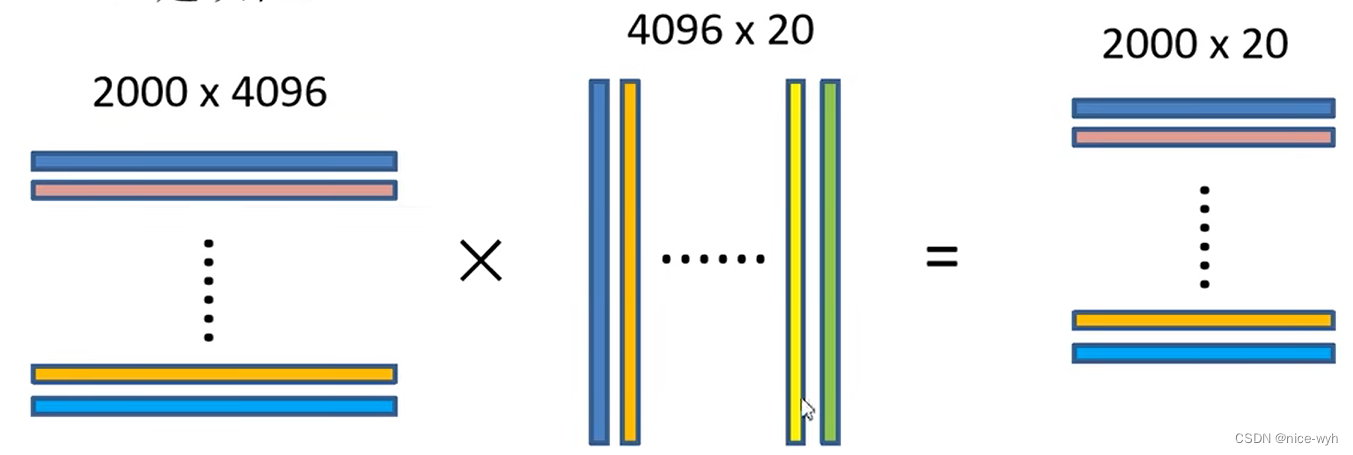
4.非极大值抑制剔除重叠建议框

5.使用回归器精细修正候选框位置
对NMS处理后剩余的建议框进一步筛选。接着分别用20个回归器对上述20个类别中的剩余的建议框进行回归操作,最终得到每个类别的修正后的得分最好的bounding box。
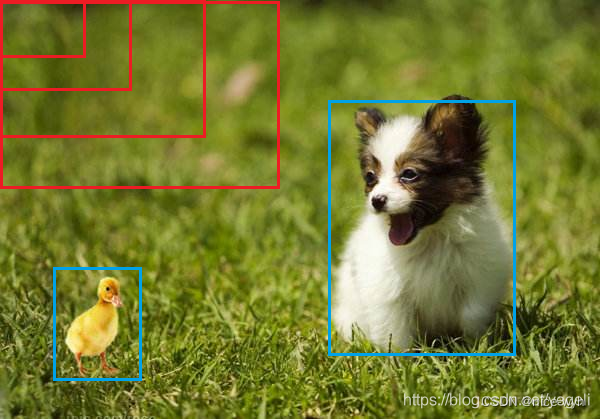
如图,黄色框P表示建议框Region Proposal,绿色窗G表示实际框Ground Truth,红色窗G^代表Region Proposal进行线性回归后的预测窗口,可以用最小二乘解决的线性回归问题。

RCNN存在的问题:
(1)测试速度慢
测试一张图片约53s(CPU)。用Selective Search算法提取候选框用时约2s,一张图像内候选框之间存在大量重叠,提取特征冗余。
(2)训练速度慢
过程极其繁琐
(3)训练所需空间大
对于SVM和bbox回归训练,需要从每个图像中的每个目标候选框提取特征,并写入磁盘。对于非常深的网络,如VGG16,从VOCO7训练集上的5
k图像上提取的特征需要数百GB的存储空间。
FastR-CNN
定义
Fast R-CNN是基于R-CNN和SPPnets进行的改进。SPPnets,其创新点在于只进行一次图像特征提取(而不是每个候选区域计算一次),然后根据算法,将候选区域特征图映射到整张图片特征图中。
流程
使用selective search生成region proposal,大约2000个左右区域候选框(joint training)缩放图片的scale得到图片金字塔,FP得到conv5的特征金字塔(joint training)对于每个scale的每个ROI,求取映射关系,在conv5中剪裁出对应的patch。并用一个单层的SSP layer来统一到一样的尺度(对于AlexNet是6*6)(joint training) 继续经过两个全连接得到特征,这特征又分别共享到两个新的全连接,连接上两个优化目标。第一个优化目标是分类,使用softmax,第二个优化目标是bbox regression,使用了一个平滑的L1-loss测试时需要加上NMS处理:利用窗口得分分别对每一类物体进行非极大值抑制提出重叠建议框,最终得到每个类别中回归修正后的得分最高的窗口
改进
和RCNN相比,训练时间从84小时减少为9.5小时,测试时间从47秒减少为0.32秒。在VGG16上,Fast RCNN训练速度是RCNN的9倍,测试速度是RCNN的213倍;训练速度是SPP-net的3倍,测试速度是SPP-net的3倍
Fast RCNN在PASCAL VOC 2007上准确率相差无几,约在66~67%之间
加入RoI Pooling,采用一个神经网络对全图提取特征
在网络中加入了多任务函数边框回归,实现了端到端的训练
缺点
依旧采用selective search提取region proposal(耗时2~3秒,特征提取耗时0.32秒)
无法满足实时应用,没有真正实现端到端训练测试
利用了GPU,但是region proposal方法是在CPU上实现的
FasterR-CNN
同样使用VGG16作为网络的backbone,与RCNN相比训练时间快9倍,测试推理时间快213倍,准确率从62%提升至66%。
算法流程
整体流程
四步
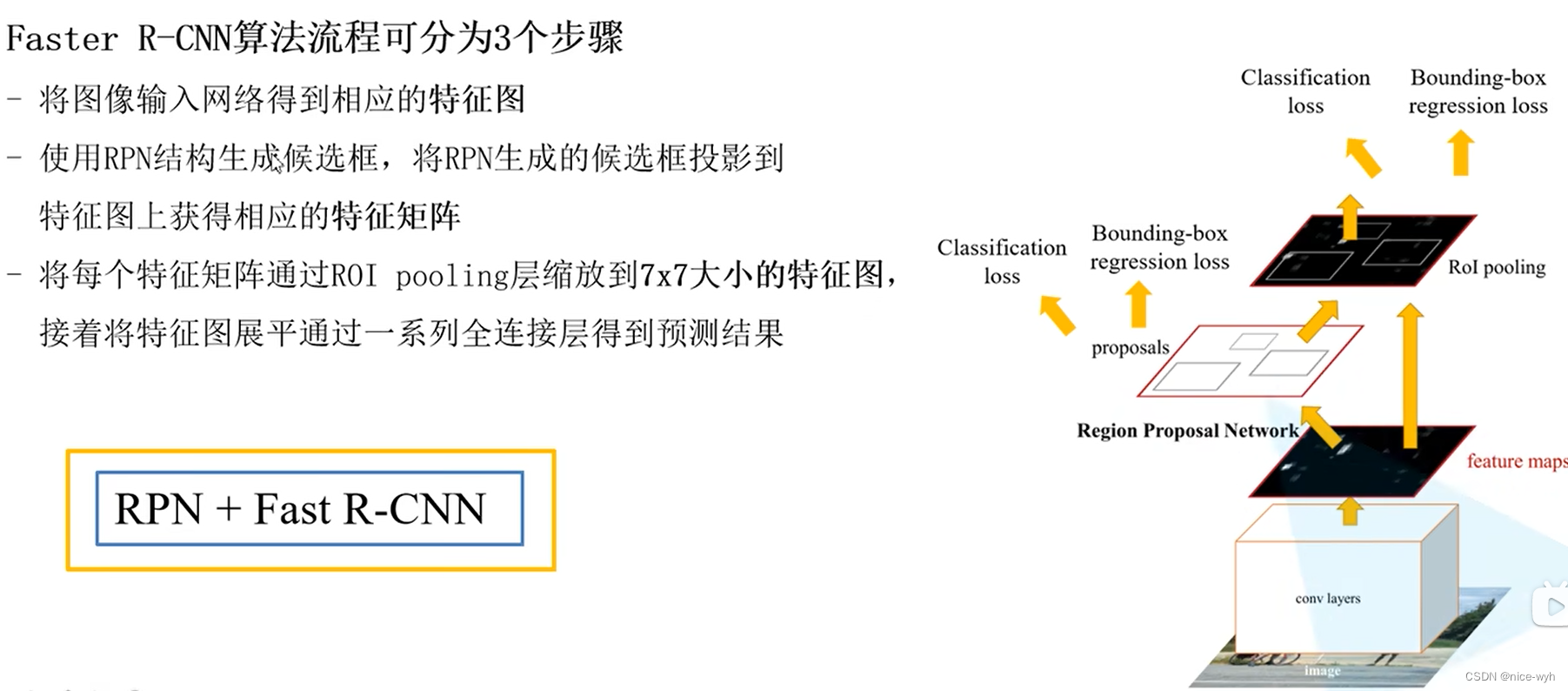
- Conv Layers。作为一种CNN网络目标检测方法,Faster RCNN首先使用一组基础的卷积/激活/池化层提取图像的特征,形成一个特征图,用于后续的RPN层和全连接层。
- Region Proposal Networks(RPN)。RPN网络用于生成候选区域,该层通过softmax判断锚点(anchors)属于前景还是背景,在利用bounding box regression(包围边框回归)获得精确的候选区域。
- RoI Pooling。该层收集输入的特征图和候选区域,综合这些信息提取候选区特征图(proposal feature maps),送入后续全连接层判定目标的类别。
- Classification。利用取候选区特征图计算所属类别,并再次使用边框回归算法获得边框最终的精确位置。
Anchors
Anchors(锚点)指由一组矩阵,每个矩阵对应不同的检测尺度大小。如下矩阵
其中每行4个值(x 1 , y 1 , x 2 , y 2),对应矩形框左上角、右下角相对于中心点的偏移量。9个矩形共有三种形状,即1:1, 1:2, 2:1,即进行多尺度检测。

例如,一张800*600的原始图片,经过VGG下采样后(生成特征矩阵)16倍大小,大小变为50*38,每个点设置9个anchor,则总数为:
ceil(800 / 16) * ceil(600 / 16) * 9 = 50 * 38 * 9 = 17100
Bounding box regression
物体识别完成后,通过一种方式对外围框进行调整,使得和目标物体更加接近。
损失函数
对一个图像的损失函数,是一个分类损失函数与回归损失函数的叠加:

- i是一个mini-batch中anchor的索引
- pi 是anchor i 为目标的预测概率
- ground truth标签pi*就是1,如果anchor为负,pi* 就是0
- ti是一个向量,表示预测的包围盒的4个参数化坐标
- Ncls是与正anchor对应的ground truth的坐标向量
- Nreg为anchor位置的数量(大约2400),λ=10
分类损失函数:

位置损失函数:

其中

改进
在VOC2007测试集测试mAP达到73.2%,目标检测速度可达5帧/秒
提出Region Proposal Network(RPN),取代selective search,生成待检测区域,时间从2秒缩减到了10毫秒
真正实现了一个完全的End-To-End的CNN目标检测模型
共享RPN与Fast RCNN的特征
缺点
还是无法达到实时检测目标
获取region proposal, 再对每个proposal分类计算量还是较大
版权声明:本文为CSDN博主「YEGE学AI算法」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/yegeli/article/details/109861867
相关文章:
目标检测理论知识
目标检测 1.基本概念 目标检测(Object Detection)的任务是找出图像中所有感兴趣的目标(物体),确定它们的类别和位置,是计算机视觉领域的核心问题之一。由于各类物体有不同的外观、形状和姿态,…...

聚观早报 |蔚来推出婚车服务;长城汽车第三季度财报
【聚观365】10月30日消息 蔚来推出婚车服务 长城汽车第三季度财报 AI汽车机器人极越01上市 谷歌投资初创公司Anthropic 东方财富第三季度营收 蔚来推出婚车服务 据蔚来汽车官方消息,蔚来宣布推出“蔚来用户专享”的婚庆用车定制服务。 据悉,该服务…...

垃圾收费站
使用form-data传递数组和x-www-form-urlencoded传递的区别 项目场景: 我将后端接口的一个接收参数设计成了数组,然后前端使用form-data去传递 问题描述 访问的时候出现了问题,后端接收到的数组多出了一层中括号,也就是被两层中括号…...

ElasticSearch 统计搜索热词
实际开发中,我们会统计某个模块下的搜索热词,这个在elasticsearch中特别好用,也比较简单, 使用可以使用 "terms aggregation" 来统计热词 terms 是代表的elasticSerach中的Term Query,统计的就是Term Query, Term Query是一种最基本的查询方式,它用于在Ela…...
el-table(vue2中)滚动条被固定列盖住
一、项目场景: vue2 el-table 二、问题描述 1、现场图片: 2、全局css环境配置了滚动条高度为6px /* 全局滚动条配置 */ ::-webkit-scrollbar {width: 6px;height: 6px; }::-webkit-scrollbar-track {background-color: #f1f1f1; }::-webkit-scrollbar-…...

两数之和(C++解法)
题目 给你两个 非空 的链表,表示两个非负的整数。它们每位数字都是按照 逆序 的方式存储的,并且每个节点只能存储 一位 数字。 请你将两个数相加,并以相同形式返回一个表示和的链表。 你可以假设除了数字 0 之外,这两个数都不会…...
SCNet:自校正卷积网络(附代码)
论文地址:https://mftp.mmcheng.net/Papers/20cvprSCNet.pdf 代码地址:https://github.com/MCG-NKU/SCNet 1.是什么? SCNet是一种卷积神经网络,它使用自校准卷积(Self-Calibrated Convolutions)来增强子…...

【PG】PostgreSQL客户端认证pg_hba.conf文件
目录 文件格式 连接类型(TYPE) 数据库(database) 用户(user) 连接地址(address) 格式 IPv4 IPv6 字符 主机名 主机名后缀 IP-address/IP-mask auth-method trust reject scram-sha-256 md5 password gss sspi …...

信创优选,国产开源。Solon v2.5.11 发布
Solon 是什么框架? Java 生态级应用开发框架。从零开始构建,有自己的标准规范与开放生态(历时五年,具备全球第二级别的生态规模)。与其他框架相比,解决了两个重要的痛点:启动慢,费内…...

180.188.16.1网站高并发,导致网站卡了,有什么方案处理?
处理网站高并发需要考虑多方面的因素,以下是一些解决方法: 增加服务器硬件:增加服务器内存、CPU、带宽等硬件资源,以提高服务器的处理能力,从而增强网站处理请求的能力。 使用CDN:将网站的静态资源&#x…...

P1077 [NOIP2012 普及组] 摆花 题解
文章目录 题目描述输入格式输出格式样例样例输入样例输出 数据范围与提示思路与部分实现完整代码 题目描述 小明的花店新开张,为了吸引顾客,他想在花店的门口摆上一排花,共 m m m 盆。通过调查顾客的喜好,小明列出了顾客最喜欢的…...
)
kubernetes源码阅读与实战(3)
kubernetes源码二次开发系列 1、k8s二次开发之kubernetes开发概念 2、k8s二次开发之自定义的example展示 3、k8s二次开发之如何扩展kubernetes系统 4、k8s二次开发之kubernetes控制器的控制循环 5、k8s二次开发之kubernetes控制器的watch事件及event对象 6、k8s二次开发之…...
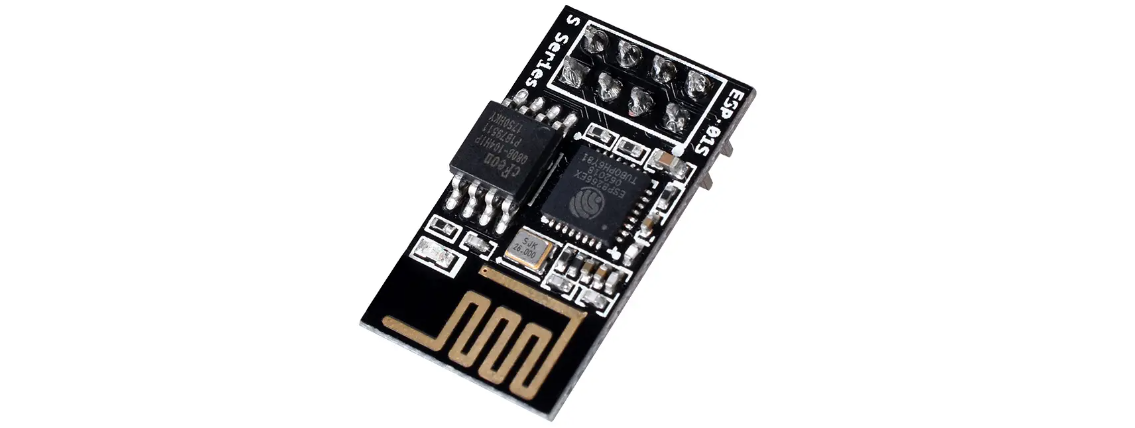
ESP8266模块常规调试过程讲解
ESP8266-WIFI模块串口调试过程讲解 一、ESP8266介绍 ESP8266是一个高度集成的无线SoC(System on a Chip)模块,基于ESP8266芯片,集成了Wi-Fi功能。具有丰富的特性和功能,广泛应用于各种物联网项目中。 ESP8266模块支持802.11b/g/n无线标准,内置TCP/IP协议栈,可以实现串…...

使用onnxruntime推理Bert模型
Bert模型类别:onnx 输入输出数据格式:.npz import onnxruntime import numpy as np import os# 加载 ONNX 模型 ort_session onnxruntime.InferenceSession(bert-base-uncased_final.onnx)# 指定输入文件夹和输出文件夹 input_folder output_folder …...

SQL group by、where和having语句用法
SQL 语句中的 GROUP BY 子句用于将具有相同值的行分组在一起,通常与聚合函数(如 COUNT、SUM、AVG 等)一起使用。WHERE 子句用于筛选符合条件的行。HAVING 子句则在分组后对分组结果进行进一步筛选。 以下是一个使用 SQL 语句中的 GROUP BY、W…...
贝叶斯变分方法:初学者指南--平均场近似
Eric Jang: A Beginners Guide to Variational Methods: Mean-Field Approximation (evjang.com) 一、说明 变分贝叶斯 (VB) 方法是统计机器学习中非常流行的一系列技术。VB 方法允许我们将 统计推断 问题(即,给定另一个随机变量的值来推断随机变量的值&…...
Node学习笔记之user用户API模块
1、获取用户的基本信息 步骤 获取登录会话存储的session中用户的id判断是否获取到id根据用户id查询数据库中的个人信息检查指定 id 的用户是否存在将密码设置为空将数据返回给前端 // 获取用户信息数据 exports.userinfo (req, res) > {(async function () {// 1. 获取…...

智慧公厕:为公众提供全新的公共厕所使用体验
智慧公厕管理系统通过智能化技术的应用,为公众提供了全新的公厕使用体验。不仅仅是一个普通的提供“方便”的公共设施,智慧公厕更融合了精准环境监测、厕位占用监测、设备状态实时监控等功能,同时还提供了自动化清洁、灯光照明、除臭杀菌消毒…...

共谈信创谋发展 | 开源网安主办的信创生态构建沙龙圆满完成
10月26日,由珠海市工业和信息化局、珠海市高新区科技创新和产业发展局指导,珠海华发产业园与开源网安珠海公司等联合主办的“赋能数字转型 提速国产替代”—Uni-Idea信创生态构建沙龙在华发信创产业园成功举办,近百位行业代表参加本次活动&…...

第四章认识Node.js模块化开发
Node.js系统模块 续上一篇文章第三章认识Node.js模块化开发-CSDN博客,这次继续来认识和总结以下node的常用模块开发 Node.js系统模块是指Node.js自带的一些模块,这些模块可以直接在Node.js中使用,无需安装其他包。以下是常用的Node.js系统模块…...

AI系统行为治理:构建确定性护栏与运行时安全控制
1. 项目概述:为AI系统构建确定性的行为护栏如果你正在构建一个会“动手”的AI应用——无论是能帮你写代码的智能助手,还是能操作数据库的自动化流程,甚至是部署在物理设备上的机器人——那么你迟早会面临一个核心问题:如何确保它只…...

5分钟掌握拼多多数据采集:Scrapy-Pinduoduo爬虫实战指南
5分钟掌握拼多多数据采集:Scrapy-Pinduoduo爬虫实战指南 【免费下载链接】scrapy-pinduoduo 拼多多爬虫,抓取拼多多热销商品信息和评论 项目地址: https://gitcode.com/gh_mirrors/sc/scrapy-pinduoduo 想要获取拼多多平台的热销商品信息和用户评…...

如何3分钟掌握Chat2DB:AI智能数据库管理完整指南
如何3分钟掌握Chat2DB:AI智能数据库管理完整指南 【免费下载链接】Chat2DB AI-driven database tool and SQL client, The hottest GUI client, supporting MySQL, Oracle, PostgreSQL, DB2, SQL Server, DB2, SQLite, H2, ClickHouse, and more. 项目地址: https…...

2026届学术党必备的六大AI论文工具推荐榜单
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 撰写AI毕业论文之时,需一直坚守学术伦理底线,严格禁止直接靠着生成式…...

如何在C++中使用标准库的智能指针
使用标准库的智能指针* 注意,在使用数组的时候需要使用数组的特化版本。#include <iostream> #include <memory>std::unique_ptr<char[]> division(int x, int y) {std::unique_ptr<char[]> sp(new char[100]{});if (y 0) {throw "Pl…...
)
ChatGPT Discord机器人开发全链路拆解(含Rate Limit绕过策略与上下文记忆优化)
更多请点击: https://intelliparadigm.com 第一章:ChatGPT与Discord机器人开发全链路概览 构建一个能调用 ChatGPT 能力的 Discord 机器人,需跨越 API 集成、身份认证、消息路由与状态管理四大核心层。该链路并非单向调用,而是一…...

3种完整破解方案深度解析:Beyond Compare 5授权密钥生成技术实现指南
3种完整破解方案深度解析:Beyond Compare 5授权密钥生成技术实现指南 【免费下载链接】BCompare_Keygen Keygen for BCompare 5 项目地址: https://gitcode.com/gh_mirrors/bc/BCompare_Keygen BCompare_Keygen是一个基于Python 3开发的Beyond Compare 5.x版…...
)
汽车资讯网站|基于springboot+vue的汽车资讯网站(源码+数据库+文档)
汽车资讯网站 目录 基于springbootvue的汽车资讯网站 一、前言 二、系统设计 三、系统功能设计 四、数据库设计 五、核心代码 六、论文参考 七、最新计算机毕设选题推荐 八、源码获取: 博主介绍:✌️大厂码农|毕设布道师,阿里云开…...

基于MCP协议与AI的智能收据处理服务器:从OCR到结构化提取实战
1. 项目概述:一个专为收据处理而生的MCP服务器如果你经常需要处理各种格式的收据、发票或账单,无论是个人记账、公司报销,还是财务审计,那么你肯定对“数据录入”这个繁琐环节深恶痛绝。一张张纸质或电子收据,上面的关…...

基于RAG架构的企业级AI知识库:从原理到部署实战
1. 项目概述:一个AI驱动的企业级知识管理新范式最近在探索企业知识库与AI结合的实际落地方案时,我注意到了GitHub上一个名为akshata29/entaoai的项目。这个项目名称本身就是一个很好的线索:“entao” 很容易让人联想到 “Enterprise AI”&…...