论文 辅助笔记:t2vec train.py
1 train
1.1 加载training和validation数据
def train(args):logging.basicConfig(filename=os.path.join(args.data, "training.log"), level=logging.INFO)'''设置了日志的基本配置。将日志信息保存到名为 "training.log" 的文件中日志的级别被设置为 INFO,这意味着所有级别为 INFO 及以上的日志消息都会被记录。'''trainsrc = os.path.join(args.data, "train.src")traintrg = os.path.join(args.data, "train.trg")trainmta = os.path.join(args.data, "train.mta")trainData = DataLoader(trainsrc, traintrg, trainmta, args.batch, args.bucketsize)#使用自定义的Dataloader 加载训练数据print("Reading training data...")trainData.load(args.max_num_line)#从指定的源文件、目标文件和元数据文件中加载数据,并按照桶大小进行组织print("Allocation: {}".format(trainData.allocation))print("Percent: {}".format(trainData.p))valsrc = os.path.join(args.data, "val.src")valtrg = os.path.join(args.data, "val.trg")valmta = os.path.join(args.data, "val.mta")#使用自定义的Dataloader 加载测试数据if os.path.isfile(valsrc) and os.path.isfile(valtrg):valData = DataLoader(valsrc, valtrg, valmta, args.batch, args.bucketsize, True)print("Reading validation data...")valData.load()assert valData.size > 0, "Validation data size must be greater than 0"print("Loaded validation data size {}".format(valData.size))else:print("No validation data found, training without validating...")'''首先检查验证数据的文件是否存在。如果存在,则加载验证数据;否则,输出一个消息表示没有找到验证数据,并且将在没有验证的情况下进行训练'''1.2 创建优化器、loss function等
## create criterion, model, optimizerif args.criterion_name == "NLL":#检查args.criterion_name是否为"NLL"criterion = NLLcriterion(args.vocab_size)lossF = lambda o, t: criterion(o, t)如果是,使用NLLcriterion创建一个损失函数。else:assert os.path.isfile(args.knearestvocabs),\"{} does not exist".format(args.knearestvocabs)'''首先,确保args.knearestvocabs指向一个存在的文件。如果不是,则触发断言错误。'''print("Loading vocab distance file {}...".format(args.knearestvocabs))with h5py.File(args.knearestvocabs, "r") as f:V, D = f["V"][...], f["D"][...]V, D = torch.LongTensor(V), torch.FloatTensor(D)'''加载args.knearestvocabs指向的文件内容V矩阵存储每个词汇的k个最近词汇的索引,而D矩阵存储与这些词汇的相应距离'''D = dist2weight(D, args.dist_decay_speed)#将距离矩阵逐行softmaxif args.cuda and torch.cuda.is_available():V, D = V.cuda(), D.cuda()criterion = KLDIVcriterion(args.vocab_size)lossF = lambda o, t: KLDIVloss(o, t, criterion, V, D)'''使用KLDIVcriterion创建一个损失函数,并定义另一个损失函数lossF'''triplet_loss = nn.TripletMarginLoss(margin=1.0, p=2)'''定义一个Triplet loss测量一个锚点与一个正面样本之间的距离相对于一个负面样本的距离'''1.3 创建模型
m0 = EncoderDecoder(args.vocab_size,args.embedding_size,args.hidden_size,args.num_layers,args.dropout,args.bidirectional)#创建EncoderDecoderm1 = nn.Sequential(nn.Linear(args.hidden_size, args.vocab_size),nn.LogSoftmax(dim=1))#线性层,输入维度是args.hidden_size,输出维度是args.vocab_size#接着,这个线性层的输出被送入一个LogSoftmax层,用于归一化输出并取对数if args.cuda and torch.cuda.is_available():print("=> training with GPU")m0.cuda()m1.cuda()criterion.cuda()#m0 = nn.DataParallel(m0, dim=1)else:print("=> training with CPU")#是否放在GPU上训练1.4 定义优化过程
m0_optimizer = torch.optim.Adam(m0.parameters(), lr=args.learning_rate)m1_optimizer = torch.optim.Adam(m1.parameters(), lr=args.learning_rate)#为前面定义的两个模块m0和m1各自创建了一个优化器## load model state and optmizer stateif os.path.isfile(args.checkpoint):print("=> loading checkpoint '{}'".format(args.checkpoint))logging.info("Restore training @ {}".format(time.ctime()))checkpoint = torch.load(args.checkpoint)args.start_iteration = checkpoint["iteration"]best_prec_loss = checkpoint["best_prec_loss"]m0.load_state_dict(checkpoint["m0"])m1.load_state_dict(checkpoint["m1"])m0_optimizer.load_state_dict(checkpoint["m0_optimizer"])m1_optimizer.load_state_dict(checkpoint["m1_optimizer"])else:print("=> no checkpoint found at '{}'".format(args.checkpoint))logging.info("Start training @ {}".format(time.ctime()))best_prec_loss = float('inf')'''首先检查args.checkpoint指定的路径是否存在检查点文件:如果存在,它会加载检查点,然后从中恢复模型m0、m1以及它们的优化器的状态。这对于中断后继续训练非常有用。如果不存在检查点,代码将记录开始训练的时间,并设置best_prec_loss为无穷大,表示还没有最好的损失值。'''
1.5 训练过程
num_iteration = 67000*128 // args.batchprint("Iteration starts at {} ""and will end at {}".format(args.start_iteration, num_iteration-1))#设定总迭代次数## trainingfor iteration in range(args.start_iteration, num_iteration):try:m0_optimizer.zero_grad()m1_optimizer.zero_grad()#在每次迭代开始时,都会清零之前计算的梯度。(pytorch训练三部曲1)## generative lossgendata = trainData.getbatch_generative()#获取一个桶中一个batch的train、target数据#分别将train和val数据pad成相同的长度genloss = genLoss(gendata, m0, m1, lossF, args)'''对于选择的这一个batch的src、target数据计算经过encoder-decoder之后的输出,和ground-truth单元格 最近的 k个单元格的加权距离和'''## discriminative lossdisloss_cross, disloss_inner = 0, 0if args.use_discriminative and iteration % 10 == 0:a, p, n = trainData.getbatch_discriminative_cross()'''获取三个batch的数据,a、p和n[锚点(anchor)、正例(positive)和负例(negative)]'''disloss_cross = disLoss(a, p, n, m0, triplet_loss, args)#锚点(anchor)、正例(positive)和负例(negative)经过encoder之后的hidden state的三元组距离a, p, n = trainData.getbatch_discriminative_inner()'''从同一个初始数据的不同部分产生a(锚点)、p(正例)、和n(负例)'''disloss_inner = disLoss(a, p, n, m0, triplet_loss, args)#锚点(anchor)、正例(positive)和负例(negative)经过encoder之后的hidden state的三元组距离loss = genloss + args.discriminative_w * (disloss_cross + disloss_inner)#总的loss## compute the gradientsloss.backward()#梯度反向传播## clip the gradientsclip_grad_norm_(m0.parameters(), args.max_grad_norm)clip_grad_norm_(m1.parameters(), args.max_grad_norm)#并对模型的梯度进行裁剪,以防止梯度爆炸## one step optimizationm0_optimizer.step()m1_optimizer.step()#使用前面计算的梯度更新模型的参数## average loss for one wordavg_genloss = genloss.item() / gendata.trg.size(0)if iteration % args.print_freq == 0:print("Iteration: {0:}\tGenerative Loss: {1:.3f}\t"\"Discriminative Cross Loss: {2:.3f}\tDiscriminative Inner Loss: {3:.3f}"\.format(iteration, avg_genloss, disloss_cross, disloss_inner))#打印信息if iteration % args.save_freq == 0 and iteration > 0:prec_loss = validate(valData, (m0, m1), lossF, args)if prec_loss < best_prec_loss:best_prec_loss = prec_losslogging.info("Best model with loss {} at iteration {} @ {}"\.format(best_prec_loss, iteration, time.ctime()))is_best = Trueelse:is_best = Falseprint("Saving the model at iteration {} validation loss {}"\.format(iteration, prec_loss))savecheckpoint({"iteration": iteration,"best_prec_loss": best_prec_loss,"m0": m0.state_dict(),"m1": m1.state_dict(),"m0_optimizer": m0_optimizer.state_dict(),"m1_optimizer": m1_optimizer.state_dict()}, is_best, args) #保存最好的modelexcept KeyboardInterrupt:breakt2vec 辅助笔记:data_utils-CSDN博客
2 NLLcriterion
'''
构造负对数似然损失函数(Negative Log Likelihood, y NLL)
'''
def NLLcriterion(vocab_size):weight = torch.ones(vocab_size)#建一个大小为vocab_size的全1张量,用于为每个词汇项赋权重。weight[constants.PAD] = 0'''constants.PAD是指示填充(Padding)标记的索引,这行代码将其权重设置为0这意味着在计算损失时会忽略填充标记。'''criterion = nn.NLLLoss(weight, reduction='sum')'''创建NLL损失函数。其中reduction='sum'表示损失是所有元素的总和'''return criterion注:确保传入NLL损失的输入已经经过了log_softmax,因为NLLLoss期望的输入是对数概率。
2.1 举例
假设词汇表由以下词汇组成
词汇表: ["<PAD>", "你好", "再见", "是", "吗"]
其中,"<PAD>"是用于填充序列的特殊标记。
因此,vocab_size是5,constants.PAD的索引是0。
现在,假设有以下批量预测输出(batch=2),每一行表示这个样本的预测结果(经过了log和softmax之后)
log_probs = [[-0.2, -1.5, -2.3, -3.1, -1.8],[-0.5, -1.2, -0.9, -2.5, -3.0],]
同时目标标签是[1, 2](表示第一个示例的标签是“你好”,第二个是“再见”)
所以
# 创建损失函数
criterion = NLLcriterion(5)# 示例数据
log_probs = torch.tensor([[-0.2, -1.5, -2.3, -3.1, -1.8],[-0.5, -1.2, -0.9, -2.5, -3.0],
])
targets = torch.tensor([1, 2])# 计算损失
loss = criterion(log_probs, targets)
print(loss)
#2.4
#损失 = -(-1.5) - (-0.9) = 1.5 + 0.9 = 2.43 dist2weight
'''
将给定的距离矩阵转换为一个权重矩阵
'''
def dist2weight(D, dist_decay_speed=0.8):D = D.div(100)D = torch.exp(-D * dist_decay_speed)'''使用指数衰减————让距离较小的元素(距离更近的)获得更大的权重,并且让距离较大的元素获得更小的权重'''s = D.sum(dim=1, keepdim=True)D = D / s'''逐行手动softmax'''## The PAD should not contribute to the decoding lossD[constants.PAD, :] = 0.0return D4 KLDIVcriterion
'''
创建KLloss
'''
def KLDIVcriterion(vocab_size):criterion = nn.KLDivLoss(reduction='sum')return criterion5 KLDIVloss
'''
计算 KL 散度损失,但它与通常的直接比较输出和目标之间的损失有所不同。它基于目标索引的 k-最近邻来计算损失
'''
def KLDIVloss(output, target, criterion, V, D):"""output (batch, vocab_size)target (batch,)criterion (nn.KLDIVLoss)V (vocab_size, k) 最近的K个词汇的IDD (vocab_size, k) 最近的K个词汇的距离"""## (batch, k) index in vocab_size dimension## k-nearest neighbors for targetindices = torch.index_select(V, 0, target)'''target的维度也即(seq_len*generator_batch)也就是generator_batch个sequence 每个元素的ground-truth 单元格index_select就把这些单元格作为索引id给提取了出来,得到了一个 (batch, k)generator_batch个sequence 每个元素的最近k个邻居单元格'''## (batch, k) gather along vocab_size dimensionoutputk = torch.gather(output, 1, indices)'''output的维度是 (batch, vocab_size)也即(seq_len*generator_batch, vocab_size)generator_batch个sequence 每个元素在vocab_size个单元格的概率这里只考虑最近的k个邻居单元格的概率,所以使用index_select得到的(seq_len*generator_batch, k)generator_batch个sequence 每个元素的最近k个邻居单元格的概率'''## (batch, k) index in vocab_size dimensiontargetk = torch.index_select(D, 0, target)'''generator_batch个sequence 每个元素的最近k个邻居单元格的距离'''return criterion(outputk, targetk)pytorch 笔记:KLDivLoss-CSDN博客
6 genLoss
def genLoss(gendata, m0, m1, lossF, args):"""One batch lossInput:gendata: a named tuple containsgendata.src (seq_len1, batch): input tensorgendata.lengths (1, batch): lengths of source sequencesgendata.trg (seq_len2, batch): target tensor.m0: map input to output.m1: map the output of EncoderDecoder into the vocabulary space and dolog transform.lossF: loss function.---Output:loss"""input, lengths, target = gendata.src, gendata.lengths, gendata.trgif args.cuda and torch.cuda.is_available():input, lengths, target = input.cuda(), lengths.cuda(), target.cuda()#从gendata中提取数据,并根据是否使用GPU进行调整## (seq_len2, batch, hidden_size)output = m0(input, lengths, target)'''m0是一个encoder-decoderencoder输入inputdecoder将encoder的hidden state和target 作为输入,得到和target通常的一个输出'''batch = output.size(1)loss = 0## we want to decode target in range [BOS+1:EOS]target = target[1:]for o, t in zip(output.split(args.generator_batch),target.split(args.generator_batch)):'''!!!这里我存疑,output的维度是 (seq_len2, batch, hidden_size),target的维度是(seq_len2, batch)那么进行split的时候,是否需要设置dim=1?'''## (seq_len2, generator_batch, hidden_size) =>## (seq_len2*generator_batch, hidden_size)o = o.view(-1, o.size(2))#根据论文作者给的注释,如果第二个维度是generator_batch,那上面的split就应该有dim=1o = m1(o)# (seq_len2*generator_batch, vocab_size)## (seq_len*generator_batch,)t = t.view(-1)loss += lossF(o, t)return loss.div(batch)'''seq_len2* generator_batch 每个元素到他最近的k个单元格的距离*在这个单元格的概率 ,这个概率距离的和'''genData的格式如下
7 disLoss
'''
计算三元组损失
'''
def disLoss(a, p, n, m0, triplet_loss, args):"""a (named tuple): anchor datap (named tuple): positive datan (named tuple): negative data"""a_src, a_lengths, a_invp = a.src, a.lengths, a.invpp_src, p_lengths, p_invp = p.src, p.lengths, p.invpn_src, n_lengths, n_invp = n.src, n.lengths, n.invp#从命名元组中解包数据if args.cuda and torch.cuda.is_available():a_src, a_lengths, a_invp = a_src.cuda(), a_lengths.cuda(), a_invp.cuda()p_src, p_lengths, p_invp = p_src.cuda(), p_lengths.cuda(), p_invp.cuda()n_src, n_lengths, n_invp = n_src.cuda(), n_lengths.cuda(), n_invp.cuda()## (num_layers * num_directions, batch, hidden_size)a_h, _ = m0.encoder(a_src, a_lengths)p_h, _ = m0.encoder(p_src, p_lengths)n_h, _ = m0.encoder(n_src, n_lengths)#从命名元组中解包数据## (num_layers, batch, hidden_size * num_directions)a_h = m0.encoder_hn2decoder_h0(a_h)p_h = m0.encoder_hn2decoder_h0(p_h)n_h = m0.encoder_hn2decoder_h0(n_h)#使用函数 encoder_hn2decoder_h0 来调整每个隐藏状态的形状## take the last layer as representations (batch, hidden_size * num_directions)a_h, p_h, n_h = a_h[-1], p_h[-1], n_h[-1]#使用编码器的最后一个层的输出作为数据的表示return triplet_loss(a_h[a_invp], p_h[p_invp], n_h[n_invp])#使用 triplet_loss 函数计算锚点、正样本和负样本之间的三元组损失8 validate
def validate(valData, model, lossF, args):"""valData (DataLoader)"""m0, m1 = model## switch to evaluation modem0.eval()m1.eval() #在评估之前将模型设置为评估模式,这样可以关闭dropoutnum_iteration = valData.size // args.batchif valData.size % args.batch > 0: num_iteration += 1#根据验证数据集的大小和批量大小计算需要的迭代次数。total_genloss = 0for iteration in range(num_iteration):gendata = valData.getbatch_generative()#获取一个batch的train、target数据#分别将train和val数据pad成相同的长度with torch.no_grad():genloss = genLoss(gendata, m0, m1, lossF, args)'''对于选择的这一个batch的src、target数据计算经过encoder-decoder之后的输出,和ground-truth单元格 最近的 k个单元格的加权距离和'''total_genloss += genloss.item() * gendata.trg.size(1)## switch back to training modem0.train()m1.train()return total_genloss / valData.size9 保存模型
def savecheckpoint(state, is_best, args):torch.save(state, args.checkpoint)if is_best:shutil.copyfile(args.checkpoint, os.path.join(args.data, 'best_model.pt'))'''如果is_best为True,意味着当前的模型是最好的模型,那么它会使用shutil.copyfile函数把args.checkpoint文件复制到一个新的路径这个路径由args.data文件夹和文件名'best_model.pt'组成。这样做的目的是为了保留一个单独的最好模型的副本'''相关文章:
论文 辅助笔记:t2vec train.py
1 train 1.1 加载training和validation数据 def train(args):logging.basicConfig(filenameos.path.join(args.data, "training.log"), levellogging.INFO)设置了日志的基本配置。将日志信息保存到名为 "training.log" 的文件中日志的级别被设置为 INFO&…...
同时标注分割、检测、多分类属性的工具
1、 https://blog.csdn.net/minstyrain/article/details/82385580/ 2、 https://zhuanlan.zhihu.com/p/656703406...

LeetCode75——Day24
文章目录 一、题目二、题解 一、题目 2390. Removing Stars From a String You are given a string s, which contains stars *. In one operation, you can: Choose a star in s. Remove the closest non-star character to its left, as well as remove the star itself.…...
B端企业形象设计的正确姿势,你学会了吗?
如今,企业形象设计在B端市场中变得越来越重要。它是企业与客户之间建立联系的桥梁,也是吸引目标客户的重要方式。为了帮助您打造一个独特而专业的企业形象设计,我将为您提供十个步骤。 步骤1:了解企业定位和目标 在设计B端企业形…...
我在Vscode学OpenCV 基本的加法运算
根据上一篇我们可知__图像的属性 链接:《我在Vscode学OpenCV 处理图像》 属性— API 形状 img.shape 图像大小 img.size 数据类型 img.dtype shape:如果是彩色图像,则返回包含行数、列数、通道数的数组;如果是二值图像或者灰度…...
--线性表)
数据结构与算法解析(C语言版)--线性表
本栏目致力于从0开始使用纯C语言将经典算法转换成能够直接上机运行的程序,以项目的形式详细描述数据存储结构、算法实现和程序运行过程。 参考书目如下: 《数据结构C语言版-严蔚敏》 《数据结构算法解析第2版-高一凡》 软件工具: dev-cpp 0…...

pthread 名字设置及线程标识符获取
pthread 名字设置及ID获取 pthread_setname_np 函数原型: int pthread_setname_np(pthread_t thread, const char *name);thread:要设置名称的线程标识符(pthread_t)。name:要设置的线程名称(以字符串形式…...
17、Flink 之Table API: Table API 支持的操作(1)
Flink 系列文章 1、Flink 部署、概念介绍、source、transformation、sink使用示例、四大基石介绍和示例等系列综合文章链接 13、Flink 的table api与sql的基本概念、通用api介绍及入门示例 14、Flink 的table api与sql之数据类型: 内置数据类型以及它们的属性 15、Flink 的ta…...

Ubuntu:解决PyCharm中不能输入中文或者输入一个中文解决方法
1.问题: Ubuntu22.04中,在pycharm里打字输入中文,每次都是只能输入第一个中文,后面输入的都变成了英文字母。。。无论咋调输入法,都没用,反正除了第一个字其他的输进去都是英文,而且汉字下面还…...

Vue3.0 reactive与ref :VCA模式
简介 Vue3 最大的一个变动应该就是推出了 CompositionAPI,可以说它受ReactHook 启发而来;它我们编写逻辑更灵活,便于提取公共逻辑,代码的复用率得到了提高,也不用再使用 mixin 担心命名冲突的问题。 ref 与 reactive…...

项目实战 | 使用Linux宝塔面板搭建商城公众号小程序基础框架
项目实战 | 使用Linux宝塔面板搭建商城公众号&小程序基础框架 1. 小程序/公众号运行的必备条件2. 准备阿里云ECS主机3. 宝塔面板基本配置4. 通过宝塔面板安装相关服务5. 新建站点并进行初始配置6. 服务配置6.1. PHP配置6.2. 数据库配置6.3. Redis配置6.4. 消息队列Supervis…...

IDEA远程调试代码
IDEA->RUN->Edit Configurations 端口随便选一个,选择调试模块,然后用IDEA生成的命令调试 java -agentlib:jdwptransportdt_socket,servery,suspendn,address*:8081 -jar backend-1.18.11.jar &...
目标检测 图像处理 计算机视觉 工业视觉
目标检测 图像处理 计算机视觉 工业视觉 工业表盘自动识别(指针型和数值型)智能水尺识别电梯中电动车识别,人数统计缺陷检测(半导体,电子元器件等)没带头盔检测基于dlib的人脸识别抽烟检测和睡岗检测/驾驶疲…...

【1day】宏景OA get_org_tree.jsp接口SQL注入漏洞学习
注:该文章来自作者日常学习笔记,请勿利用文章内的相关技术从事非法测试,如因此产生的一切不良后果与作者无关。 目录...

设计模式-迭代子模式
迭代子模式是一种行为设计模式,它提供了一种访问和遍历聚合对象中各个元素的方法,而不需要暴露聚合对象的内部表示。迭代子模式将遍历聚合对象的责任交给了迭代子对象,从而实现了聚合对象和迭代子对象的解耦。 在Java中,迭…...

绿色通道 快速理赔,渤海财险用实干书写服务品牌
7月底,受台风“杜苏芮”影响,北京市连续强降雨,西部、西南部、南部遭遇特大暴雨,房山、门头沟、丰台等地陆续出现山洪暴发现象。 灾害无情人有情,为更好地保障人民群众生命财产安全,渤海财险北京分…...
微信小程序怎么制作?【小程序开发平台教学】
随着移动互联网的快速发展,微信小程序已经成为了人们日常生活中不可或缺的一部分。从购物、支付、出行到社交、娱乐、教育,小程序几乎涵盖了我们生活的方方面面。那么,对于有营销需求的企业商家来说,如何制作一个自己的微信小程序…...
HTML、CSS和JavaScript,实现换肤效果的原理
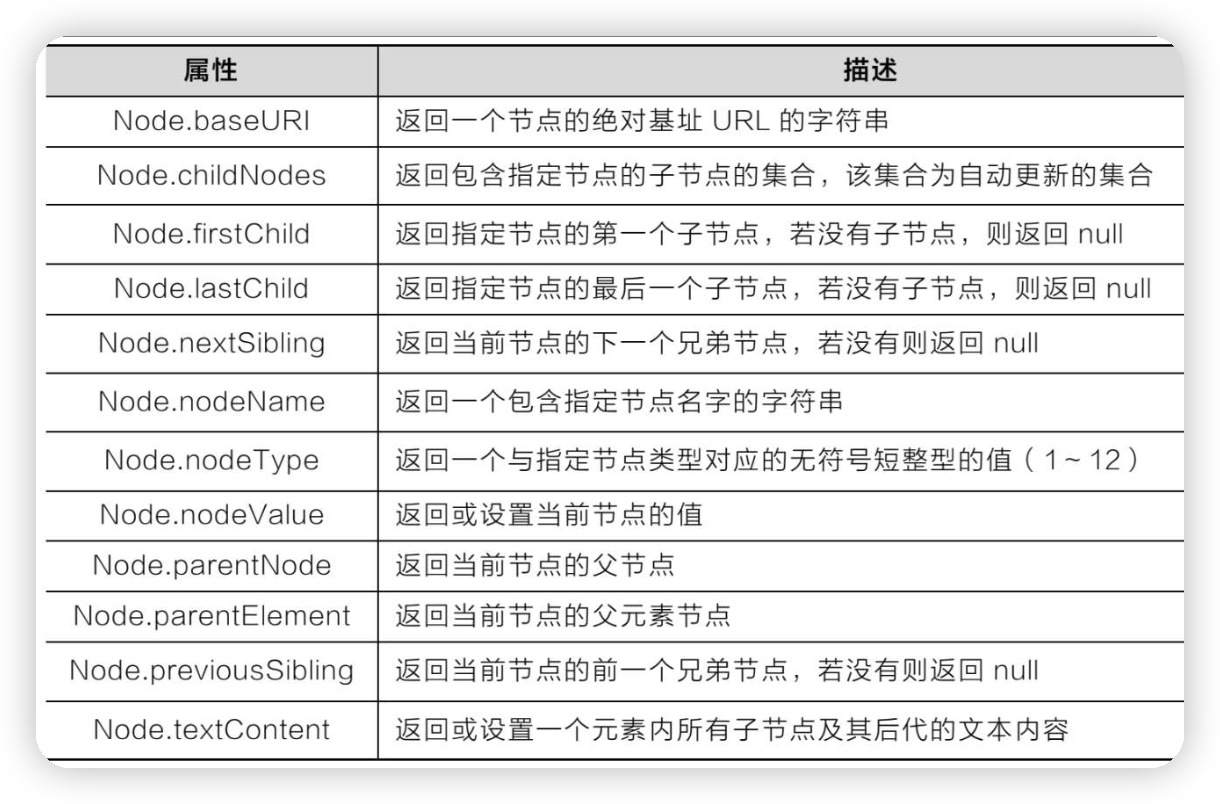
这篇涉及到HTML DOM的节点类型、节点层级关系、DOM对象的继承关系、操作DOM节点和HTML元素 还用到HTML5的本地存储技术。 换肤效果的原理:是在选择某种皮肤样式之后,通过JavaScript脚本来加载选中的样式,再通过localStorage存储。 先来回忆…...

2103. 环和杆
2103. 环和杆 难度: 简单 来源: 每日一题 2023.11.02 总计有 n 个环,环的颜色可以是红、绿、蓝中的一种。这些环分别穿在 10 根编号为 0 到 9 的杆上。 给你一个长度为 2n 的字符串 rings ,表示这 n 个环在杆上的分布。rings 中每两个字符形成一个…...
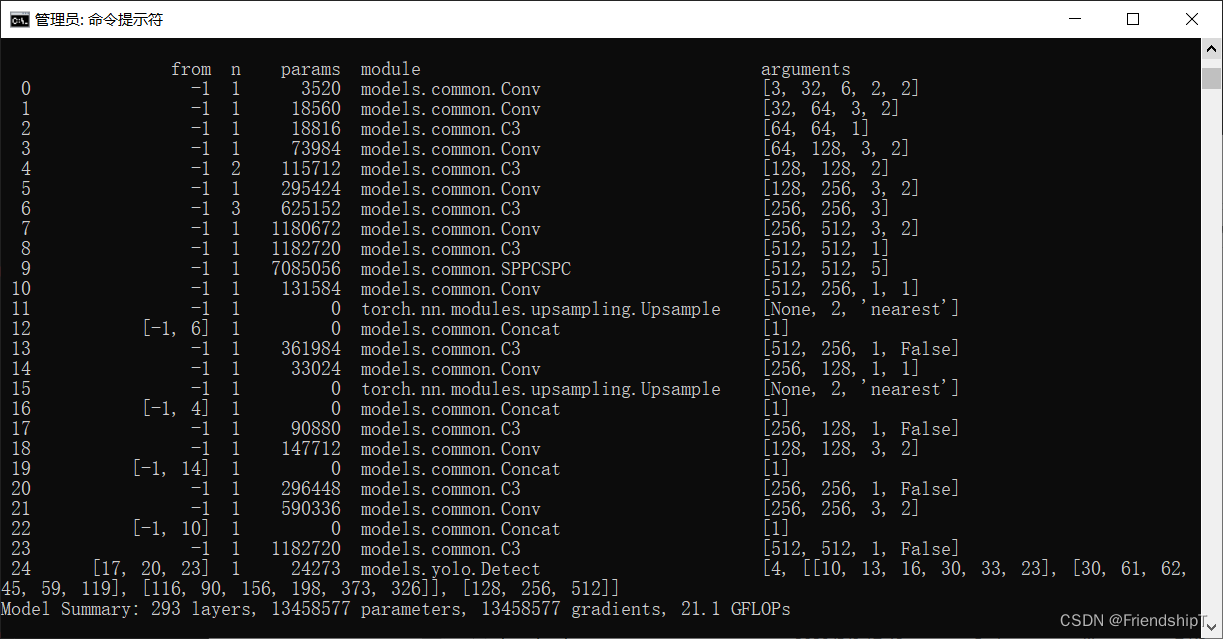
YOLOv5:修改backbone为SPPCSPC
YOLOv5:修改backbone为SPPCSPC 前言前提条件相关介绍SPPCSPCYOLOv5修改backbone为SPPCSPC修改common.py修改yolo.py修改yolov5.yaml配置 参考 前言 记录在YOLOv5修改backbone操作,方便自己查阅。由于本人水平有限,难免出现错漏,敬…...

3步实现百度网盘高速下载:Python解析工具实战指南
3步实现百度网盘高速下载:Python解析工具实战指南 【免费下载链接】baidu-wangpan-parse 获取百度网盘分享文件的下载地址 项目地址: https://gitcode.com/gh_mirrors/ba/baidu-wangpan-parse baidu-wangpan-parse是一款高效的Python工具,专门用于…...

如何用 polyfill-iconv 处理中文编码?GBK、BIG5、UTF-8 转换终极指南
如何用 polyfill-iconv 处理中文编码?GBK、BIG5、UTF-8 转换终极指南 【免费下载链接】polyfill-iconv This component provides a native PHP implementation of the php.net/iconv functions. 项目地址: https://gitcode.com/gh_mirrors/po/polyfill-iconv …...

如何优化鸿蒙 App 的启动速度?
子玥酱 (掘金 / 知乎 / CSDN / 简书 同名) 大家好,我是 子玥酱,一名长期深耕在一线的前端程序媛 👩💻。曾就职于多家知名互联网大厂,目前在某国企负责前端软件研发相关工作,主要聚…...
)
某AI漫剧超级工厂AI绘画与分镜自动化生成流水线详细设计方案(WORD)
导读:随着AIGC技术爆发,传统漫剧生产面临周期长、成本高及风格统一难等痛点,亟需构建工业化生产体系。本项目旨在打造“AI漫剧超级工厂”,通过部署Flux/SDXL大模型,集成LoRA角色微调与分镜自动化设计技术,实…...

树突状细胞相关细胞因子的功能及疾病关联
树突状细胞作为免疫系统中核心的抗原呈递细胞,其分泌的多种细胞因子(IL-1α、IL-1β、IL-6、TNFα、IL-10)在免疫反应的启动、调控及稳态维持中发挥着核心作用。这些细胞因子具有双重调控特性,既是机体抵御病原体入侵的重要屏障&a…...

3D格式转换神器:如何用stltostp轻松实现STL到STEP的无缝转换
3D格式转换神器:如何用stltostp轻松实现STL到STEP的无缝转换 【免费下载链接】stltostp Convert stl files to STEP brep files 项目地址: https://gitcode.com/gh_mirrors/st/stltostp 你是否曾经遇到这样的困境?精心设计的3D打印模型在STL格式下…...

【限时解密】ElevenLabs未公开的瑞典文语料权重配置表:仅限前200名开发者获取的/sv-SE/声道微调参数
更多请点击: https://codechina.net 第一章:瑞典文语音合成的技术背景与ElevenLabs架构定位 瑞典语作为北日耳曼语支的重要语言,拥有丰富的元音系统(9个长元音、9个短元音)、独特的声调重音(accent 1 和 a…...

5分钟打造你的桌面股票看板:TrafficMonitor股票插件完整指南
5分钟打造你的桌面股票看板:TrafficMonitor股票插件完整指南 【免费下载链接】TrafficMonitorPlugins 用于TrafficMonitor的插件 项目地址: https://gitcode.com/gh_mirrors/tr/TrafficMonitorPlugins 还在为错过重要股票行情而烦恼吗?想在工作时…...
:从sref灰度映射到氯化银颗粒模拟全链路拆解)
Midjourney范戴克印相实战手册(2024唯一认证工作流):从sref灰度映射到氯化银颗粒模拟全链路拆解
更多请点击: https://intelliparadigm.com 第一章:范戴克印相的历史溯源与数字再生哲学 范戴克印相(Van Dyke Brown printing)诞生于19世纪末,是铁银盐印相工艺的重要分支,以荷兰画家安东尼范戴克命名&am…...

系统内存报告
used_mem$(free | grep Mem | tr -s ""|cut -d "" -f3) total_mem$(free | grep Mem | tr -s ""|cut -d "" -f2) percent$(($used_mem * 100 / $total_mem)) [[ $percet -gt 50 ]] && echo "内存告警" ||echo "…...