ubuntu PX4 vscode stlink debug设置
硬件
stlink
holybro debug板
pixhawk4

安装openocd
官方文档,但是第一步安装建议从源码安装,bug少很多
github链接
编译安装,参考
./bootstrap (when building from the git repository)./configure [options]makesudo make install
安装后在usr/local/bin下面有一个openocd
px4qgc@ubuntu:~$ which openocd
/usr/local/bin/openocd
另外要注意gcc-arm路径
px4qgc@ubuntu:~$ which arm-none-eabi-gdb
/opt/gcc-arm-none-eabi-9-2020-q2-update/bin/arm-none-eabi-gdb
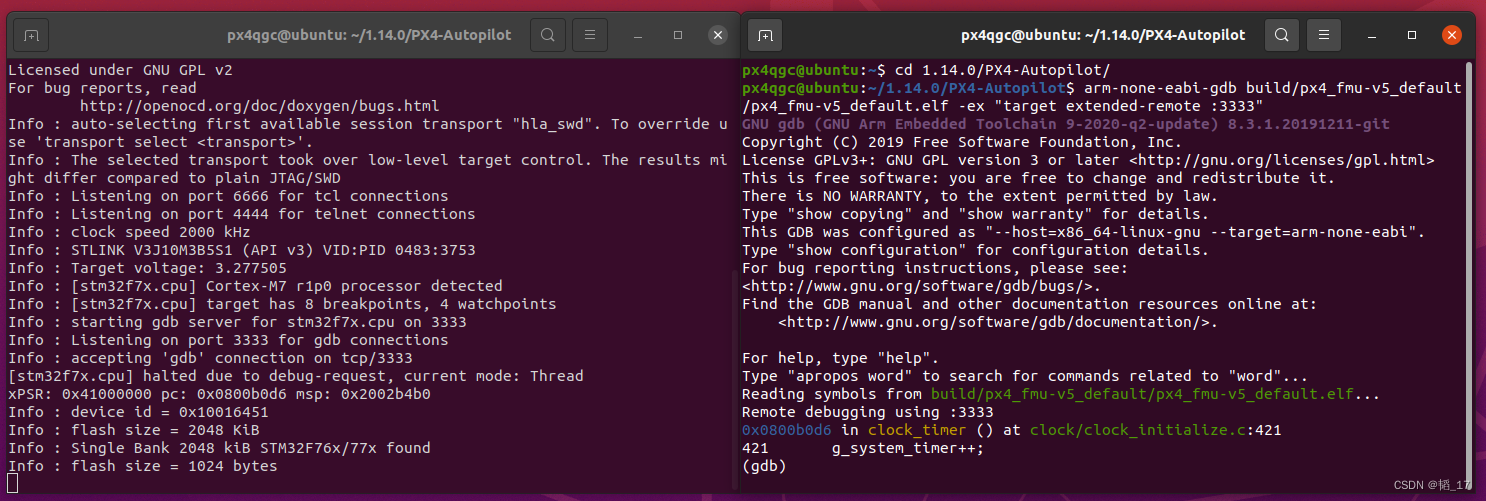
然后进行一点测试,看看环境对不对再往下走
比如我用fmuv5的pixhawk4:
openocd -f interface/stlink.cfg -f target/stm32f7x.cfg
arm-none-eabi-gdb build/px4_fmu-v5_default/px4_fmu-v5_default.elf -ex "target extended-remote :3333"
可能的报错:
arm-none-eabi-gdb: error while loading shared libraries: libncurses.so.5: cannot open shared object file: No such file or directory
安装对应的库即可
sudo apt-get update
sudo apt-get install libncurses5
usb设备权限问题
px4qgc@ubuntu:~$ openocd -f interface/stlink.cfg -f target/stm32f7x.cfg
Open On-Chip Debugger 0.11.0-dirty (2023-10-28-03:57)
Licensed under GNU GPL v2
For bug reports, readhttp://openocd.org/doc/doxygen/bugs.html
Info : auto-selecting first available session transport "hla_swd". To override use 'transport select <transport>'.
Info : The selected transport took over low-level target control. The results might differ compared to plain JTAG/SWD
Info : Listening on port 6666 for tcl connections
Info : Listening on port 4444 for telnet connections
Info : clock speed 2000 kHz
Error: libusb_open() failed with LIBUSB_ERROR_ACCESS
为stlink添加usb规则
sudo gedit /etc/udev/rules.d/99-openocd.rules
# For ST-Link
SUBSYSTEMS=="usb", ATTRS{idVendor}=="0483", ATTRS{idProduct}=="3744", MODE:="666"
# For ST-Link V2
SUBSYSTEMS=="usb", ATTRS{idVendor}=="0483", ATTRS{idProduct}=="3748", MODE:="666"
# For ST-Link V2-1 (STM32 Nucleo boards)
SUBSYSTEMS=="usb", ATTRS{idVendor}=="0483", ATTRS{idProduct}=="374b", MODE:="666"
# For ST-Link V3
SUBSYSTEMS=="usb", ATTRS{idVendor}=="0483", ATTRS{idProduct}=="3753", MODE:="666"
# For ST-Link V3 MINIE
SUBSYSTEMS=="usb", ATTRS{idVendor}=="0483", ATTRS{idProduct}=="3754", MODE:="666"
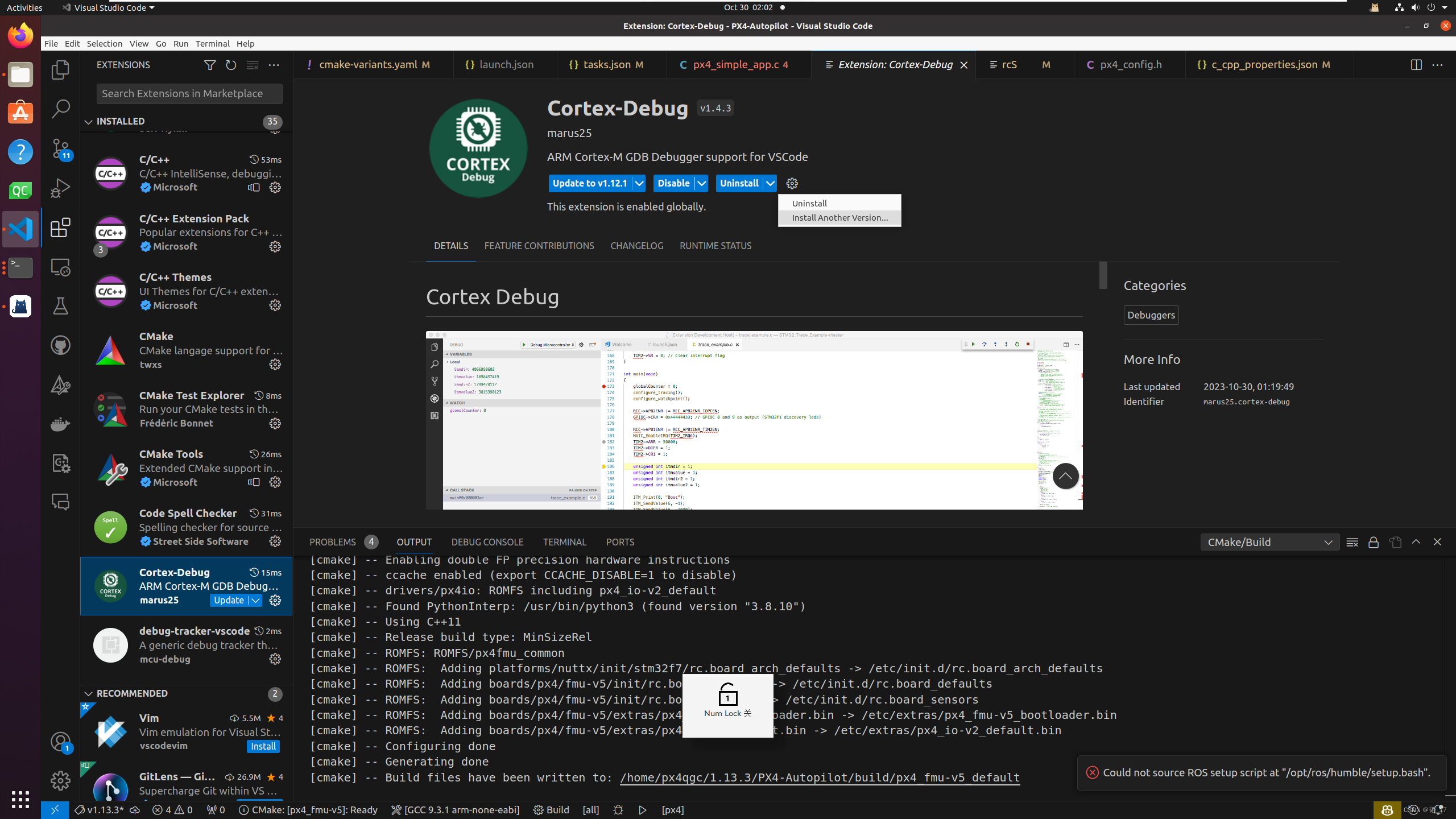
vscode配置
从github上面clone下来代码有一个.vscode文件夹,这个非常重要,给定了vscode的很多配置
按照官方文档安装vscode插件,注意,如果用的arm-gcc版本是2020-q2,gdb版本就是8,不能用最新的cortex-bug,我试了1.4.3可以
task.json里面加上
{"label": "echo","type": "shell","command": "echo ${env:USERNAME}"},{"dependsOn":"Build","label": "Build and Download","type": "shell","command": "openocd","args": ["-f","interface/stlink.cfg","-f","target/stm32f7x.cfg","-c","program ./build/px4_fmu-v5_default/px4_fmu-v5_default.elf 0x8000 verify reset exit "],"problemMatcher": []},
launch.json加上:
{"name": "FMUv5 Debug ST-Link","type": "cortex-debug","request": "launch","cwd": "${workspaceRoot}","executable": "${command:cmake.launchTargetPath}",//"serverpath": "${env:JLINK_SERVER}","servertype": "openocd","device": "STM32F765II","interface": "swd","configFiles": ["interface/stlink.cfg","target/stm32f7x.cfg"],"serialNumber": "", //If you have more than one J-Link probe, add the serial number here."svdFile": "STM32F7x5.svd","preLaunchTask":"Build and Download"},
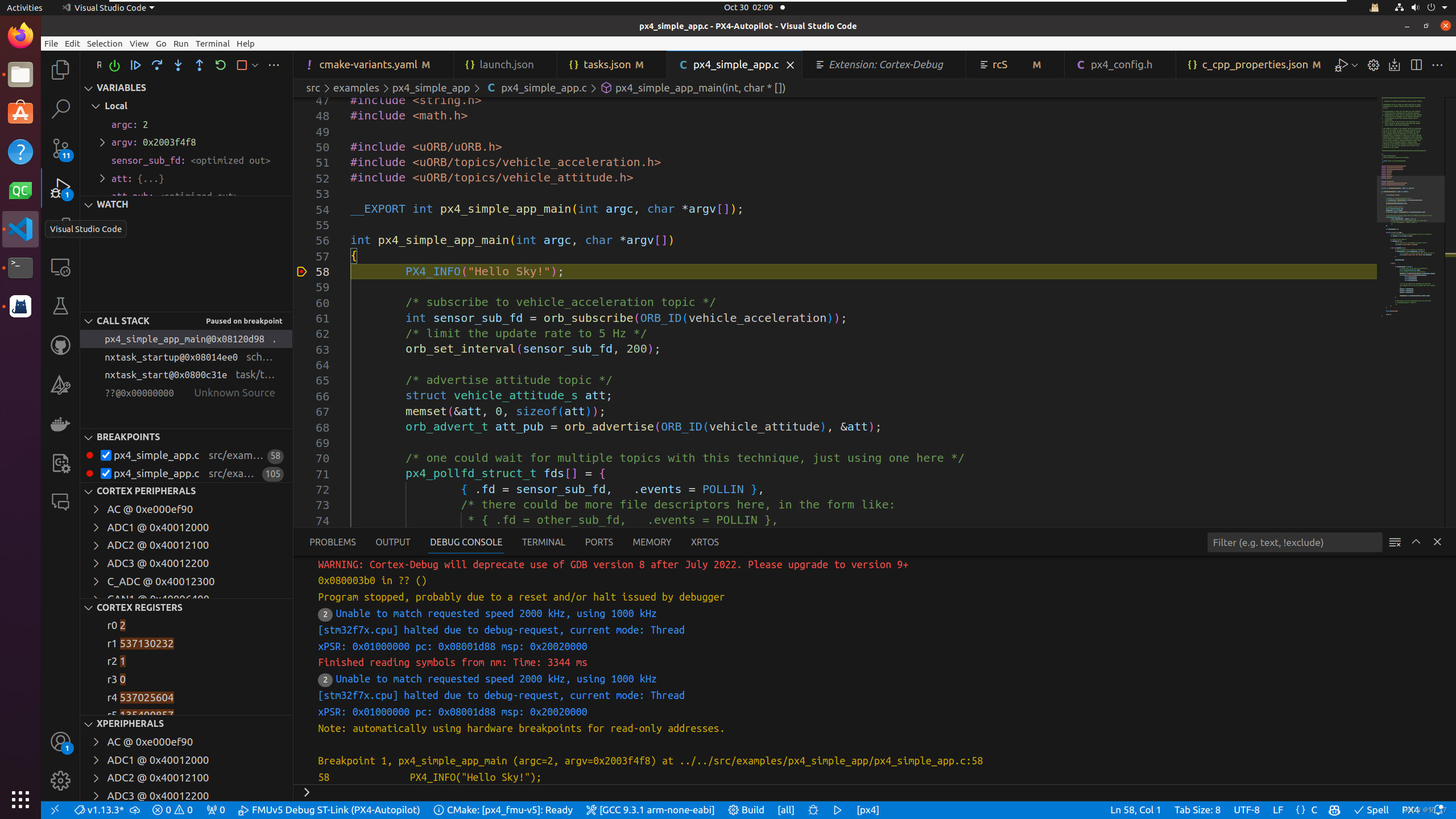
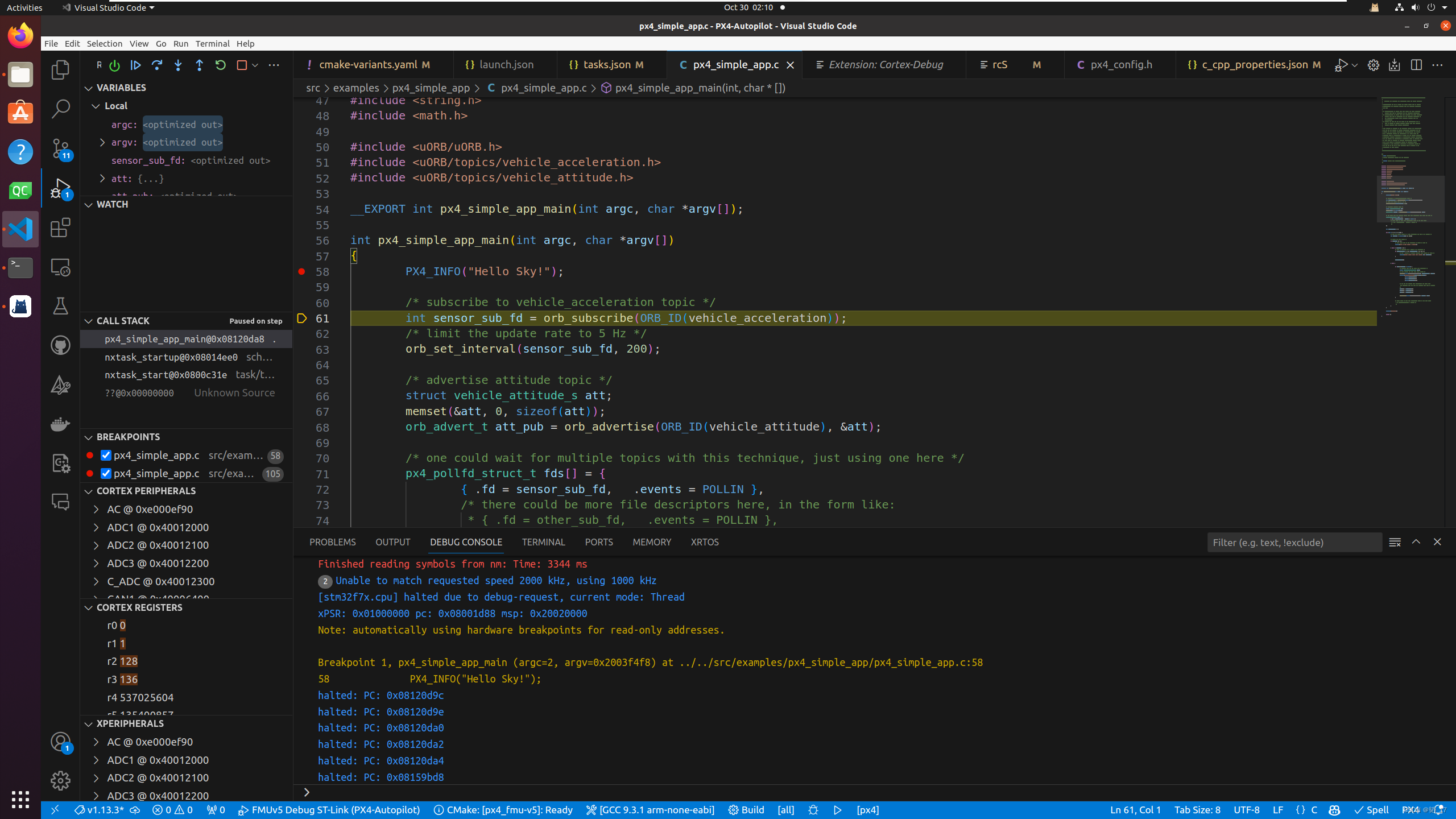
给px4_simple_app.c加一个断点,点击调试,openocd会负责用stlink刷入最新固件,并启动调试
效果如下图:
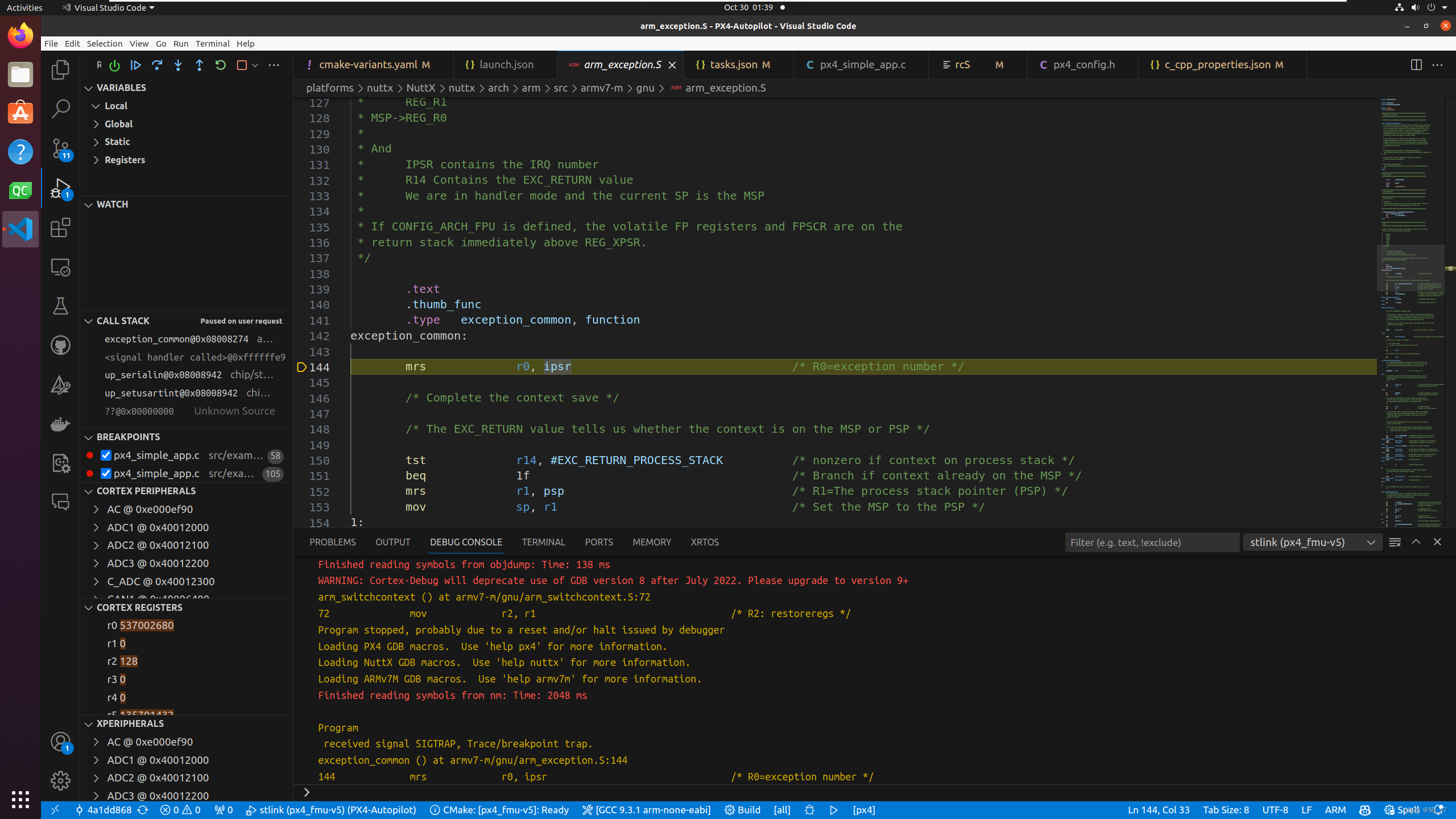
默认的那个st-util从来没在fmuv5上面好使过,会进入下面这个图的莫名其妙的地方,不用了,v6c倒是可以
如果遇到没有要编译的对象,比如6c,在这自己加就行
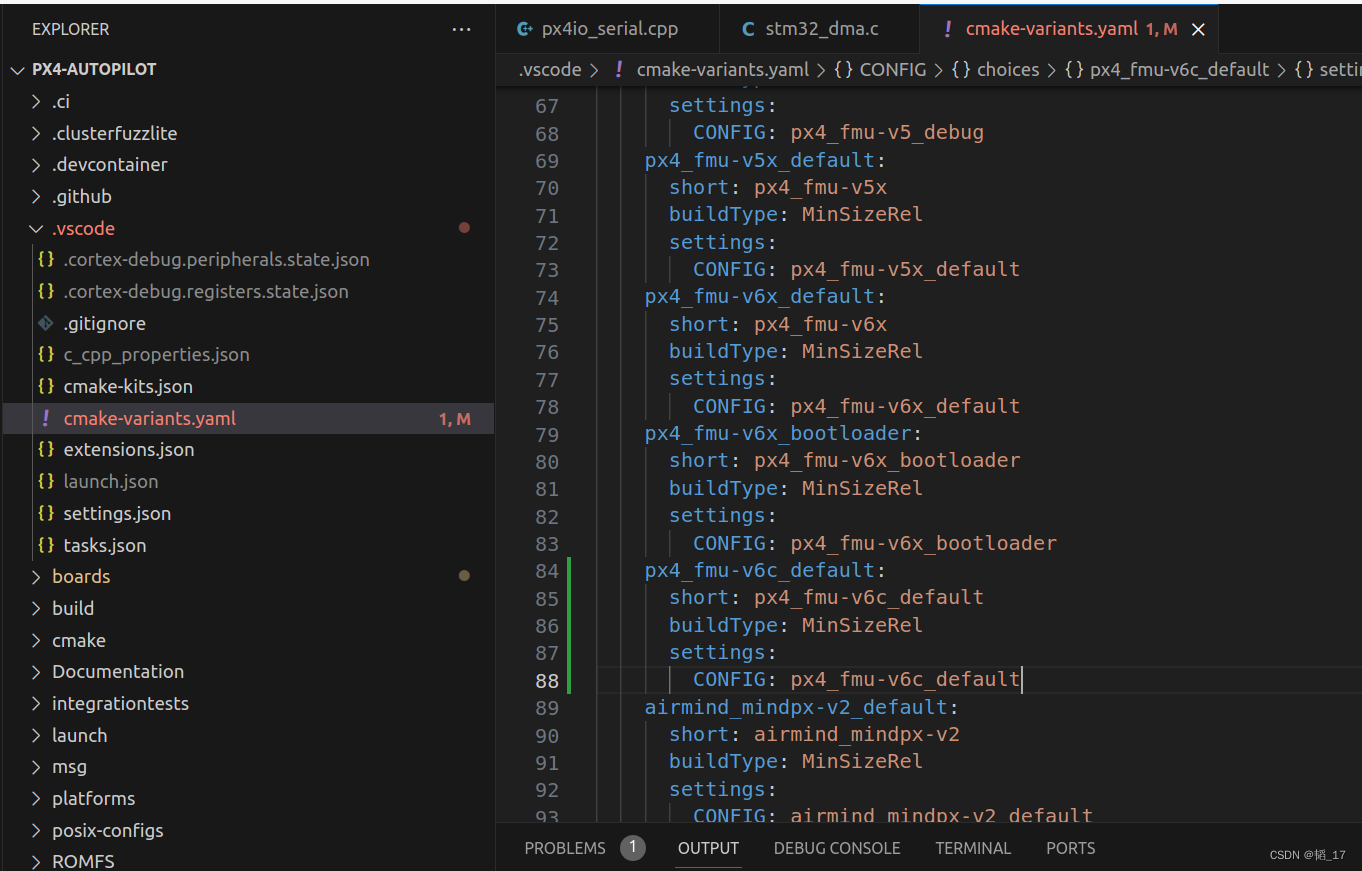
pixhawk6c
默认的就可以,但是感觉费劲死了,写一下openocd的配置
烧写命令:
openocd -f interface/stlink.cfg -f target/stm32h7x_dual_bank.cfg -c "program ./build/px4_fmu-v6c_default/px4_fmu-v6c_default.elf verify reset exit "
openocd -f interface/stlink.cfg -f target/stm32h7x_dual_bank.cfg
arm-none-eabi-gdb build/px4_fmu-v6c_default/px4_fmu-v6c_default.elf -ex "target extended-remote :3333"
launch.json
{"name": "FMUv6c Debug ST-Link","type": "cortex-debug","request": "launch","cwd": "${workspaceRoot}","executable": "${command:cmake.launchTargetPath}",//"serverpath": "${env:JLINK_SERVER}","servertype": "openocd","device": "STM32H743VI","interface": "swd","configFiles": ["interface/stlink.cfg","target/stm32h7x_dual_bank.cfg"],"serialNumber": "", //If you have more than one J-Link probe, add the serial number here."svdFile": "STM32H743.svd","preLaunchTask":"Build and Download"},
launch.json 如果不想每次都重新编译,就把executable改了
{"name": "FMUv6c Debug ST-Link","type": "cortex-debug","request": "launch","cwd": "${workspaceRoot}","executable": "./build/px4_fmu-v6c_default/px4_fmu-v6c_default.elf",//"serverpath": "${env:JLINK_SERVER}","servertype": "openocd","device": "STM32H743VI","interface": "swd","configFiles": ["interface/stlink.cfg","target/stm32h7x_dual_bank.cfg"],"serialNumber": "", //If you have more than one J-Link probe, add the serial number here."svdFile": "STM32H743.svd","preLaunchTask":"Build and Download"},
tasks.json
{"label": "echo","type": "shell","command": "echo ${env:USERNAME}"},{// "dependsOn":"Build","label": "Build and Download","type": "shell","command": "openocd","args": ["-f","interface/stlink.cfg","-f","target/stm32h7x_dual_bank.cfg","-c","program ./build/px4_fmu-v6c_default/px4_fmu-v6c_default.elf verify reset exit "],"problemMatcher": []},
原版st-util配置文件:
{"name": "stlink (px4_fmu-v6c)","gdbPath": "/opt/gcc-arm-none-eabi-9-2020-q2-update/bin/arm-none-eabi-gdb","device": "STM32H743VI","svdFile": "STM32H743.svd","executable": "./build/px4_fmu-v6c_default/px4_fmu-v6c_default.elf","request": "launch","type": "cortex-debug","servertype": "stutil","cwd": "${workspaceFolder}","internalConsoleOptions": "openOnSessionStart","preLaunchCommands": ["source ${workspaceFolder}/platforms/nuttx/Debug/PX4","source ${workspaceFolder}/platforms/nuttx/Debug/NuttX","source ${workspaceFolder}/platforms/nuttx/Debug/ARMv7M","set mem inaccessible-by-default off","set print pretty",]},
相关文章:
ubuntu PX4 vscode stlink debug设置
硬件 stlink holybro debug板 pixhawk4 安装openocd 官方文档,但是第一步安装建议从源码安装,bug少很多 github链接 编译安装,参考 ./bootstrap (when building from the git repository)./configure [options]makesudo make install安装后…...

Flask的一种启动方式和三种托管方式
1. 原生启动 Flask 支持使用原生的 app.run() 方法来启动应用程序。这种方法是最简单、最基本的启动方式,适用于开发环境和小型应用程序。 from flask import Flaskapp Flask(__name__)app.route(/) def hello_world():return Hello, World!if __name__ __main__…...

cudnn too short
原因是libcudnn.so为软链接,相当于快捷键,但是没有映射到真正的libcudnn.so.8.9.5上 cd /usr/local/cuda-11.6/lib64 ln -s libcudnn.so.8.9.5 libcudnn.so.8...
01、SpringBoot + MyBaits-Plus 集成微信支付 -->项目搭建
目录 SpringBoot MyBaits-Plus 集成微信支付 之 项目搭建1、创建boot项目2、引入Swagger作用:2-1、引入依赖2-2、写配置文件进行测试2-3、访问Swagger页面2-4、注解优化显示 3、定义统一结果作用:3-1、引入lombok依赖3-2、写个统一结果的类-->RR类的…...
Linux 性能调优之网络优化
写在前面 考试整理相关笔记分享一些 Linux 中网络内核参数调优的笔记理解不足小伙伴帮忙指正 对每个人而言,真正的职责只有一个:找到自我。然后在心中坚守其一生,全心全意,永不停息。所有其它的路都是不完整的,是人的逃…...

RT-Thread系统使用常见问题处理记录
1.使用telnet连接系统时发送help指令显示不全的问题。 原因:telnet发送缓存太小。 解决办法:更改agile_telnet软件包里Set agile_telnet tx buffer size的大小。 2.使用Paho MQTT软件包过一段时间报错hard fault on thread: mqtt0 解决办法࿱…...
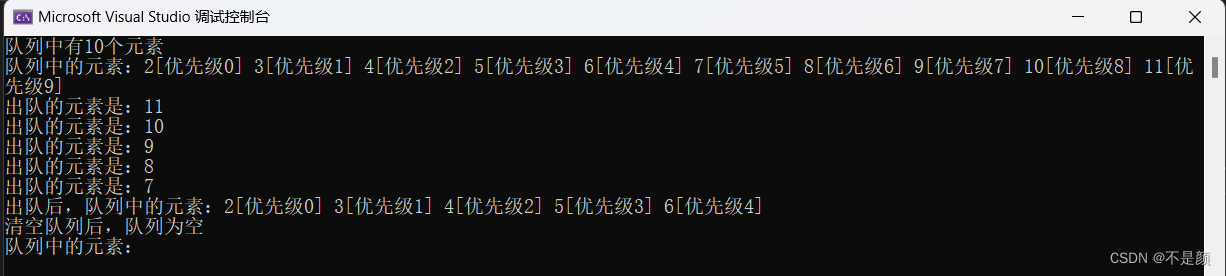
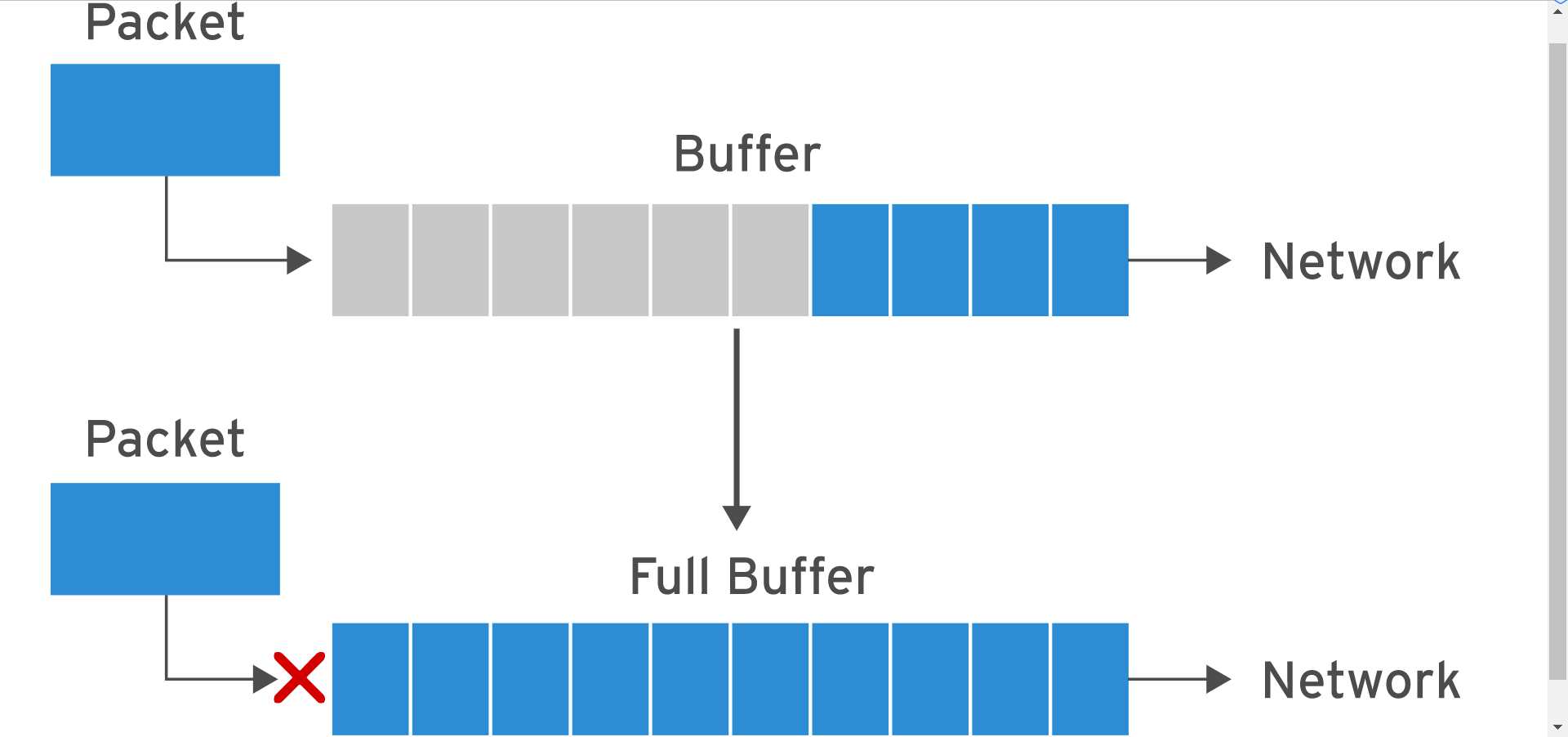
优先队列----数据结构
概念 不知道你玩过英雄联盟吗?英雄联盟里面的防御塔会攻击离自己最近的小兵,但是如果有炮车兵在塔内,防御塔会优先攻击炮车(因为炮车的威胁性更大),只有没有兵线在塔内时,防御塔才会攻击英雄。…...
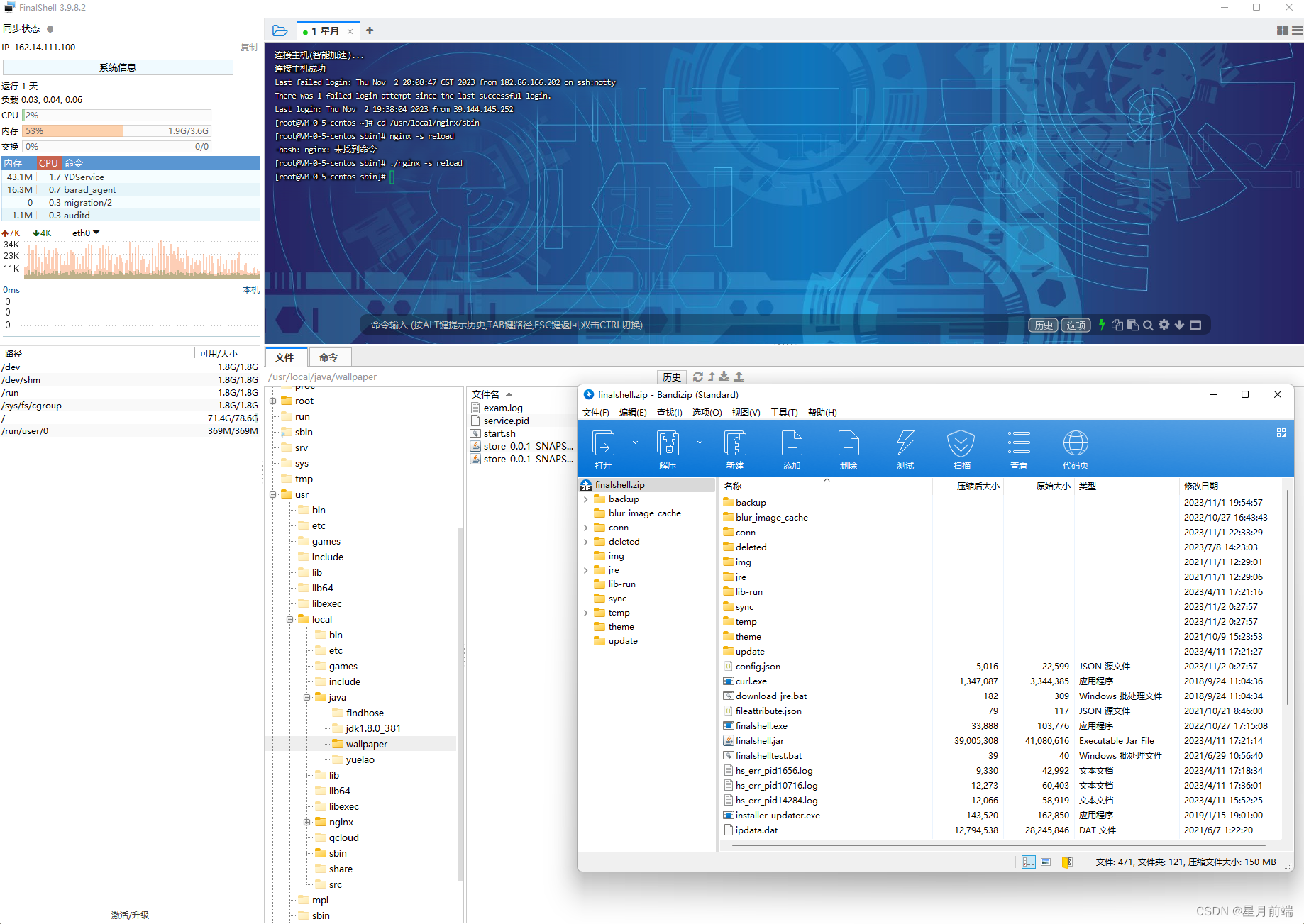
nginx项目部署教程
nginx项目部署教程 1. 项目部署介绍 当我们的项目开发完毕后,我们需要将项目打包、部署到服务器上,供用户来使用。 目前,常见的部署方式有两种: 后端部署 前后端分离部署 1-1 后端部署 这是最古老的部署方式,也是…...

资源限流 + 本地分布式多重锁——高并发性能挡板,隔绝无效流量请求
前言 在高并发分布式下,我们往往采用分布式锁去维护一个同步互斥的业务需求,但是大家细想一下,在一些高TPS的业务场景下,让这些请求全部卡在获取分布式锁,这会造成什么问题? 瞬时高并发压垮系统 众所周知…...

day52【子序列】300.最长递归子序列 674.最长连续递增序列 718.最长重复子数组
文章目录 300.最长递增子序列674.最长连续递增序列718.最长重复子数组 300.最长递增子序列 题目链接:力扣链接 讲解链接:代码随想录链接 题意:给你一个整数数组 nums ,找到其中最长严格递增子序列的长度。 子序列 是由数组派生而…...

计算机视觉 计算机视觉识别是什么?
计算机视觉识别(Computer Vision Recognition)是计算机科学和人工智能领域中的一个重要分支,它致力于使计算机系统能够模拟和理解人类视觉的过程,从而能够自动识别、分析和理解图像或视频中的内容。这一领域的发展旨在让计算机具备…...
Make.com实现多个APP应用的自动化的入门指南
Make.com是一款基于云的自动化平台,可帮助用户将多个应用程序连接在一起,并通过设置自动化流程来简化日常任务。Make.com提供丰富的API集成,支持连接各种流行的应用程序,包括社交媒体、电子商务、CRM等。 使用Make.com实现多个AP…...
的简介、原理、性能、实现步骤、案例应用之详细攻略)
LLMs之HFKR:HFKR(基于大语言模型实现异构知识融合的推荐算法)的简介、原理、性能、实现步骤、案例应用之详细攻略
LLMs之HFKR:HFKR(基于大语言模型实现异构知识融合的推荐算法)的简介、原理、性能、实现步骤、案例应用之详细攻略 目录 HFKR的简介 异构知识融合:一种基于LLM的个性化推荐新方法...

多模态 多引擎 超融合 新生态!2023亚信科技AntDB数据库8.0产品发布
9月20日,以“多模态 多引擎 超融合 新生态”为主题的亚信科技AntDB数据库8.0产品发布会成功举办,从技术和生态两个角度全方位展示了AntDB数据库第8次大型能力升级和生态建设成果。浙江移动、用友、麒麟软件、华录高诚、金云智联等行业伙伴及业界专家共同…...

elasticsearch无法访问9200端口
近期部署elasticsearch后,启动时发现一直报如下错误: curl: (7) Failed connect to localhost:9200; Connection refused 部署的版本为elasticsearch-7.13.2,排查原因是因为开启了ssl认证。 解决方法: 在/opt/software/elasticsearch-7.13.2/config下…...
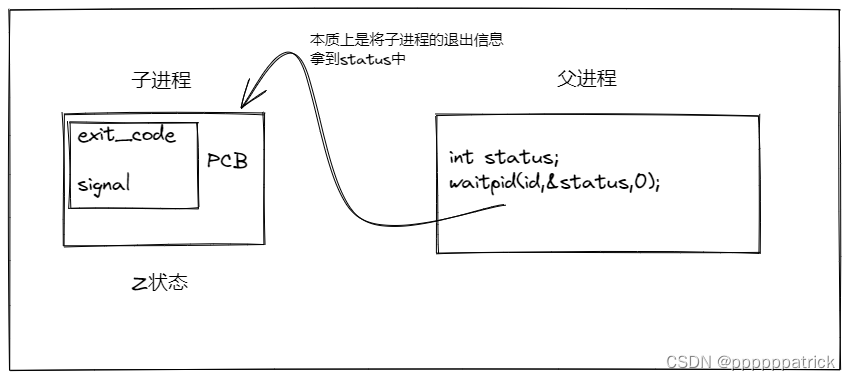
【Linux】进程等待
文章目录 进程等待进程等待必要性实验(见见猪跑)进程等待的方法wait方法waitpid**方法**宏的使用方法获取子进程status 阻塞VS非阻塞概念对比非阻塞有什么好处 具体代码实现进程的阻塞等待方式:进程的非阻塞等待方式:让父进程做其他任务 进程等待 进程等待必要性 之前讲过&am…...

电视「沉浮录」:跌出家电“三大件”?
【潮汐商业评论/原创】 “这年头谁还看电视,家里电视近一年都没打开过了,我明天就打算把它二手卖掉。”想到已落灰许久的电视机,Andy打开了二手平台。 “要不是这几年孩子网课多,我是真没考虑换新电视,家里用了8年的…...

前端实现调用打印机和小票打印(TSPL )功能
Ⅰ- 壹 - 使用需求 前端 的方式 点击这个按钮,直接让打印机打印我想要的东西 Ⅱ - 贰 - 小票打印 目前比较好的方式就是直接用 TSPL 标签打印指令集, 基础环境就不多说了,这个功能的实现就是利用usb发送指令,现在缺少个来让我们能够和usb沟通的工具,下面这就是推…...
串口通信(6)应用定时器中断+串口中断实现接收一串数据
本文为博主 日月同辉,与我共生,csdn原创首发。希望看完后能对你有所帮助,不足之处请指正!一起交流学习,共同进步! > 发布人:日月同辉,与我共生_单片机-CSDN博客 > 欢迎你为独创博主日月同…...
【WinForm详细教程六】WinForm中的GroupBox和Panel 、TabControl 、SplitContainer控件
文章目录 1.GroupBox和Panel2.TabControl3.SplitContainer 1.GroupBox和Panel GroupBox:是一个分组容器,提供一个框架将相关的控件组织在一起,它有标题、边框,但没有滚动条。 Panel:也是一个容器控件,用来…...

KMS_VL_ALL_AIO:Windows和Office永久激活终极指南
KMS_VL_ALL_AIO:Windows和Office永久激活终极指南 【免费下载链接】KMS_VL_ALL_AIO Smart Activation Script 项目地址: https://gitcode.com/gh_mirrors/km/KMS_VL_ALL_AIO 还在为Windows系统激活和Office软件授权问题烦恼吗?KMS_VL_ALL_AIO是一…...

AssetRipper:3步解锁Unity游戏资源逆向提取的终极免费方案
AssetRipper:3步解锁Unity游戏资源逆向提取的终极免费方案 【免费下载链接】AssetRipper GUI Application to work with engine assets, asset bundles, and serialized files 项目地址: https://gitcode.com/GitHub_Trending/as/AssetRipper 在Unity游戏开发…...

chatgpt-web-midjourney-proxy的插件系统:扩展AI功能的开发指南
chatgpt-web-midjourney-proxy的插件系统:扩展AI功能的开发指南 在当今AI应用快速发展的时代,chatgpt-web-midjourney-proxy项目以其强大的插件系统脱颖而出,为开发者提供了无限扩展AI功能的可能性。这个项目不仅整合了ChatGPT、Midjourney和…...

视频修复终极指南:3步拯救你的损坏视频文件
视频修复终极指南:3步拯救你的损坏视频文件 【免费下载链接】untrunc Restore a damaged (truncated) mp4, m4v, mov, 3gp video. Provided you have a similar not broken video. 项目地址: https://gitcode.com/gh_mirrors/unt/untrunc 你是否曾经遇到过这…...
)
给新手的保姆级教程:在VMware里一步步装好Ubuntu Server 22.04 LTS(附静态IP和SSH配置)
虚拟化环境下的Ubuntu Server 22.04 LTS全流程部署指南 对于刚接触Linux服务器运维的新手而言,在虚拟化环境中搭建Ubuntu Server是一个理想的起点。不同于物理机安装,虚拟化平台提供了可重复、隔离的实验环境,让学习者能够大胆尝试而无需担心…...
)
告别手动!用Windows批处理脚本批量重命名MKV音轨(MkvToolnix v73实战)
告别手动!用Windows批处理脚本批量重命名MKV音轨(MkvToolnix v73实战) 每次整理下载的剧集资源时,最让人头疼的莫过于音轨信息错乱——明明视频是国语配音,音轨标签却显示为日语。手动修改不仅效率低下,还容…...

GD32 RISC-V BSP框架设计:从硬件抽象到跨平台移植实战
1. 项目概述:为什么我们需要一个专属的BSP框架?如果你正在使用GD32的RISC-V内核MCU,比如GD32VF103系列,并且是从STM32或者其他ARM Cortex-M平台转过来的,那你大概率踩过这样的坑:官方提供的固件库ÿ…...

电动汽车高压系统狭窄空间高精度电流电压测量方案解析
1. 项目概述:当高压测量遇上“螺蛳壳里做道场”在电动汽车的研发测试领域,尤其是实车道路测试阶段,有一个场景让很多工程师头疼不已:如何在发动机舱、底盘或电池包附近那些错综复杂、空间逼仄的线束通道里,精准地测量高…...

从推荐逻辑到库存架构:木鸟民宿、携程民宿、爱彼迎场景化服务技术对比
摘要从技术和产品设计的角度看,木鸟民宿、携程民宿、爱彼迎三家平台在场景化服务上究竟走了怎样不同的技术路径?各自用了哪些手段把“住宿”这件事匹配到用户真实的生活场景里?三家平台在技术落地上各有侧重。木鸟民宿主打“标签化即时确认”…...

水质在线监测系统嵌入式工控机选型与实战指南
1. 水质在线监测:从传统抽检到智慧物联的必然之路水,是生命之源,也是城市运行的命脉。过去,我们了解水源地的水质状况,主要依赖人工定期采样、送回实验室分析。这种方式周期长、成本高,面对突发性污染事件&…...