NOIP2023模拟10联测31 迷路
题目大意
你在野外迷路了, 你手里只有一张你当前所在的区域的地图。地图将整个区域表示为 n × m n\times m n×m的网格,你就在其中的某一个格子里。每个格子里要么有树,要么就什么都没有。地图显示了每个格子中是有树还是空的。当然,地图只记载了这个区域的情况,你可以认为地图外的地方是一片无限延伸的空地(没有树)。你现在可以做的就是探索这个区域,以找到你的出发点(保证你的出发点一开始一定在地图内)。你会按照螺旋形的顺序探索这个区域: 先往下一格,然后往右一格,接着往上一格,接着往上一格,接着往左一格,接着往左一格,接着往下一格… …下面演示了这种顺序,数字代表你探索的顺序。在一个网格中,你能知道的唯一信息就是这里是否有一棵树。地图上的区域中有 k k k个格子是有树的。
20 19 18 17 16 21 6 5 4 15 22 7 0 3 14 23 8 1 2 13 24 9 10 11 12 20 \ 19 \ 18 \ 17 \ 16 \\ 21 \ \ 6 \ \ \ 5 \ \ \ 4 \ \ 15 \\ 22 \ \ 7 \ \ \ 0 \ \ \ 3 \ \ 14 \\ 23 \ \ 8 \ \ \ 1 \ \ \ 2 \ \ 13 \\ 24 \ \ 9 \ \ 10 \ 11 \ 12 20 19 18 17 1621 6 5 4 1522 7 0 3 1423 8 1 2 1324 9 10 11 12
现在你遇到了一个商人,他会告诉你地图上的 r r r个坐标,其中一个坐标就是你的起点。你想计算出如果你从所有 n × m n\times m n×m个格子中等概率地选择 r r r个格子,你为了区分起始点所需走的步数的期望值。
“你为了区分起始点所需走的步数”指的是,对于给定的 r r r个可能的起始点中的任意一个起点,你都要通过在这几步内得到的信息判断出你在这 r r r个点中应该是从这个点开始的,所需走的最少步数。步数是你探索的网格数(因此起始网格被视为一步)。
输入有四个数 n , m , k , r n,m,k,r n,m,k,r,然后有 k k k行,每行两个数 x , y x,y x,y,表示一个有树的格子的坐标。保证坐标两两不同。
输出期望值模 998244353 998244353 998244353后的值。
1 ≤ n , m ≤ 300 , 1 ≤ k , r ≤ min ( n × m , 300 ) 1\leq n,m\leq 300,1\leq k,r\leq \min(n\times m,300) 1≤n,m≤300,1≤k,r≤min(n×m,300)
题解
我们考虑对于每一步,维护每个起点收到的信息的等价类,那么我们能区分这 r r r个点当且仅当这 r r r个点所在不同的等价类互不相同,这个的概率可以用 D P DP DP算出。时间复杂度为 O ( n 2 m 2 r ) O(n^2m^2r) O(n2m2r)。
我们考虑维护等价类,一共有 n m nm nm步,维护每一步的时间复杂度为 O ( n m ) O(nm) O(nm),所以总时间复杂度是 O ( n 2 m 2 ) O(n^2m^2) O(n2m2)的。但是我们发现树的数量比较少,所以可以用每棵树来更新每个点。于是,对于每一步,将当前这一步有树的起点从其所在的等价类中单独剥离出来,这样总时间复杂度就变为 O ( n m k ) O(nmk) O(nmk)的了。
考虑朴素 D P DP DP:设 f i , j f_{i,j} fi,j表示在前 i i i个等价类中选择了 j j j个数,使得它们在不同等价类中的方案数。这样每次计算的时间复杂度为 O ( n m r ) O(nmr) O(nmr),总时间复杂度为 O ( n 2 m 2 r ) O(n^2m^2r) O(n2m2r)。考虑优化,设当前等价类的大小分别为 a 1 , a 2 , … , a p a_1,a_2,\dots,a_p a1,a2,…,ap,那么方案数为 [ x r ] ∏ i = 1 p ( 1 + a i x ) [x^r]\prod\limits_{i=1}^p(1+a_ix) [xr]i=1∏p(1+aix)。我们可以实时维护后面的多项式,因为等价类最多只会有 n m nm nm次分裂,每次将一个大小为 a a a的等价类分为 b b b和 c c c时,对这个多项式进行的操作就是除以 ( 1 + a x ) (1+ax) (1+ax)然后乘上 ( 1 + b x ) ( 1 + c x ) (1+bx)(1+cx) (1+bx)(1+cx),这些都可以在 O ( r ) O(r) O(r)的时间复杂度下完成,所以总时间复杂度为 O ( n m r ) O(nmr) O(nmr)。
总时间复杂度为 O ( n m k + n m r ) O(nmk+nmr) O(nmk+nmr)。
可以参考代码帮助理解。
code
#include<bits/stdc++.h>
using namespace std;
const int N=300;
const long long mod=998244353;
int n,m,k,R,mx=0,tot=1,x[N+5],y[N+5],z[2*N+5][2*N+5];
long long lst,ans,jc[N*N+5],ny[N*N+5],a[N*N+5];
vector<int>w[N*N+5],v[N*N+5];
set<int>s;
long long mi(long long t,long long v){if(!v) return 1;long long re=mi(t,v/2);re=re*re%mod;if(v&1) re=re*t%mod;return re;
}
void init(){jc[0]=1;for(int i=1;i<=N*N;i++) jc[i]=jc[i-1]*i%mod;ny[N*N]=mi(jc[N*N],mod-2);for(int i=N*N-1;i>=0;i--) ny[i]=ny[i+1]*(i+1)%mod;
}
long long C(int x,int y){return jc[x]*ny[y]%mod*ny[x-y]%mod;
}
void del(int v){for(int i=1;i<=R;i++) a[i]=(a[i]-a[i-1]*v%mod+mod)%mod;
}
void add(int v){for(int i=R;i>=1;i--) a[i]=(a[i]+a[i-1]*v)%mod;
}
int main()
{
// freopen("lost.in","r",stdin);
// freopen("lost.out","w",stdout);init();scanf("%d%d%d%d",&n,&m,&k,&R);if(R==1){printf("0");return 0;}for(int i=1;i<=k;i++){scanf("%d%d",&x[i],&y[i]);}z[300][300]=1;for(int i=1;i<=300;i++){for(int j=-i+1;j<=i;j++) z[300+i][300+j]=++tot;for(int j=i-1;j>=-i;j--) z[300+j][300+i]=++tot;for(int j=i-1;j>=-i;j--) z[300-i][300+j]=++tot;for(int j=-i+1;j<=i;j++) z[300+j][300-i]=++tot;}for(int i=1;i<=n;i++){for(int j=1;j<=m;j++){int id=(i-1)*m+j;for(int p=1;p<=k;p++){w[id].push_back(z[300+x[p]-i][300+y[p]-j]);}sort(w[id].begin(),w[id].end());}}sort(w+1,w+n*m+1);for(int i=2;i<=n*m;i++){int p;for(int j=0;j<k;j++){if(w[i-1][j]!=w[i][j]){p=w[i-1][j]-1;mx=max(mx,p);break;}}v[p].push_back(i);}a[0]=1;add(n*m);s.insert(1);s.insert(n*m+1);for(int i=0;i<=mx;i++){for(int j=0;j<v[i].size();j++){int p=v[i][j];set<int>::iterator it=s.upper_bound(p);int l=*(prev(it)),r=(*it);del(r-l);add(p-l);add(r-p);s.insert(p);}ans=(ans+(a[R]-lst+mod)%mod*(i+1)%mod)%mod;lst=a[R];}ans=ans*mi(C(n*m,R),mod-2)%mod;printf("%lld",ans);return 0;
}
相关文章:

NOIP2023模拟10联测31 迷路
题目大意 你在野外迷路了, 你手里只有一张你当前所在的区域的地图。地图将整个区域表示为 n m n\times m nm的网格,你就在其中的某一个格子里。每个格子里要么有树,要么就什么都没有。地图显示了每个格子中是有树还是空的。当然,地图只记载…...

React Query + Redux toolkit 封装异步请求
当你需要进行 Redux 和 React Query 的组合时,除了常规的 Redux 方法(例如手动派发 action 和更新 state),还可以使用 createSlice 和 React Query 进行组合,这可以让你更方便地封装异步请求和更容易地更新状态。 使用…...
CSS基础知识点速览
1 基础认识 1.1 css的介绍 CSS:层叠样式表(Cascading style sheets) CSS作用: 给页面中的html标签设置样式 css写在style标签里,style标签一般在head标签里,位于head标签下。 <style>p{color: red;background-color: green;font-size…...
Windows 时间服务配置和配置工具
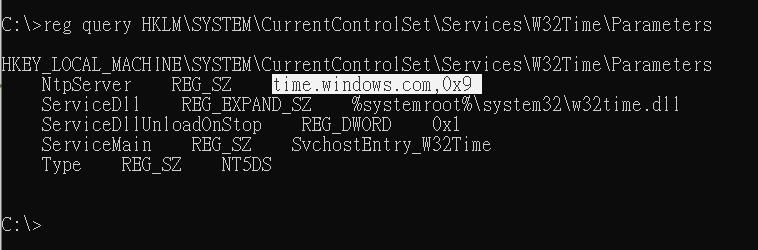
文章目录 Windows 时间服务保留Portw32tm 命令配置 Windows 时间服务配置客户端使用两个时间服务器配置客户端自动从域源同步时间检查客户端时间配置使用本地组策略编辑器配置Windows 时间注册表参考推荐阅读 Windows 时间服务 (W32Time) 为 Active Directory 域服务 (AD DS) 管…...
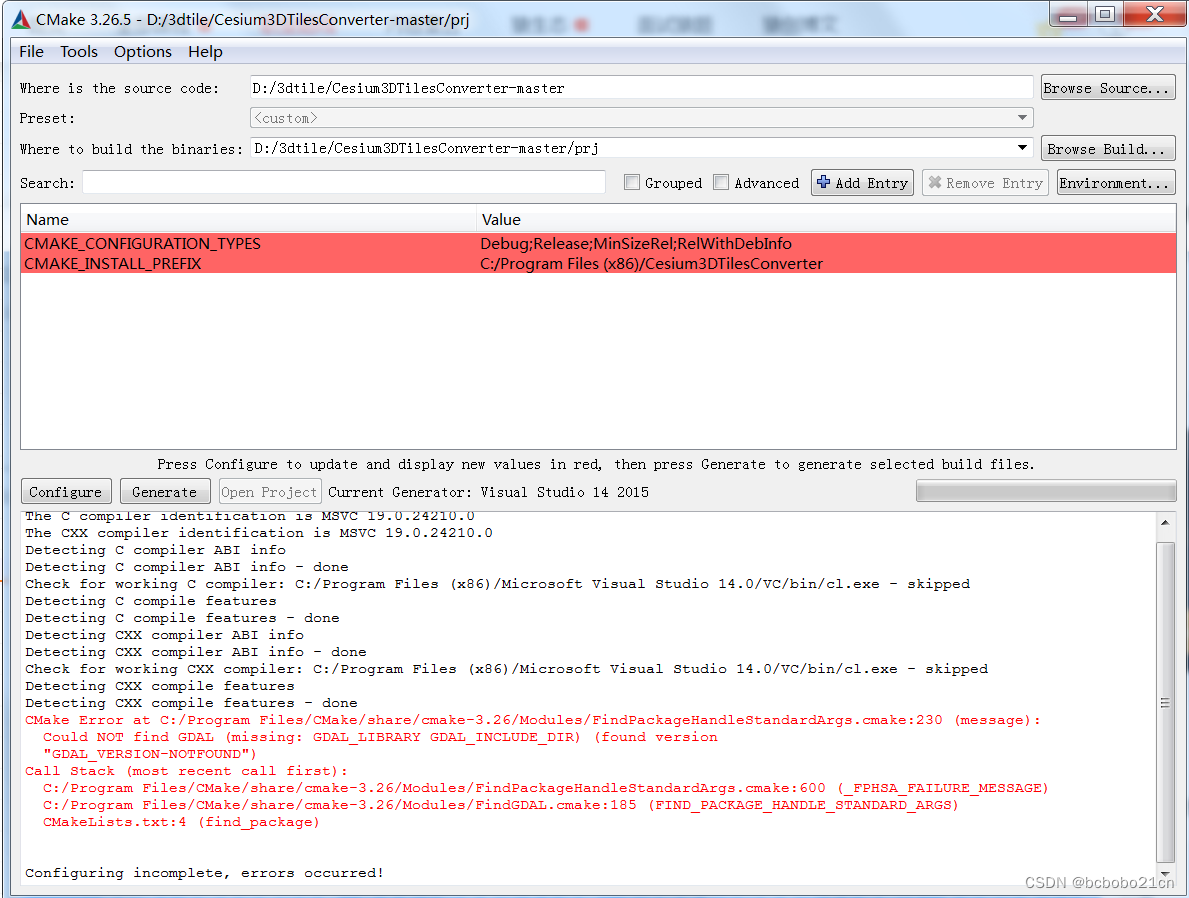
cmake find_package、引用GDAL 初步学习
上次的源码的CMakeLists.txt文件里有 find_package(GDAL REQUIRED) 这句; 从字面意思看此源码需要GDAL库; 查了一下,find_package 指令的基本功能是查找第三方库,并返回其细节; 我当前GDAL安装在D:\GDAL; 先把它的CMakeLists.txt重命名为别的,不使用; 新建一个C…...
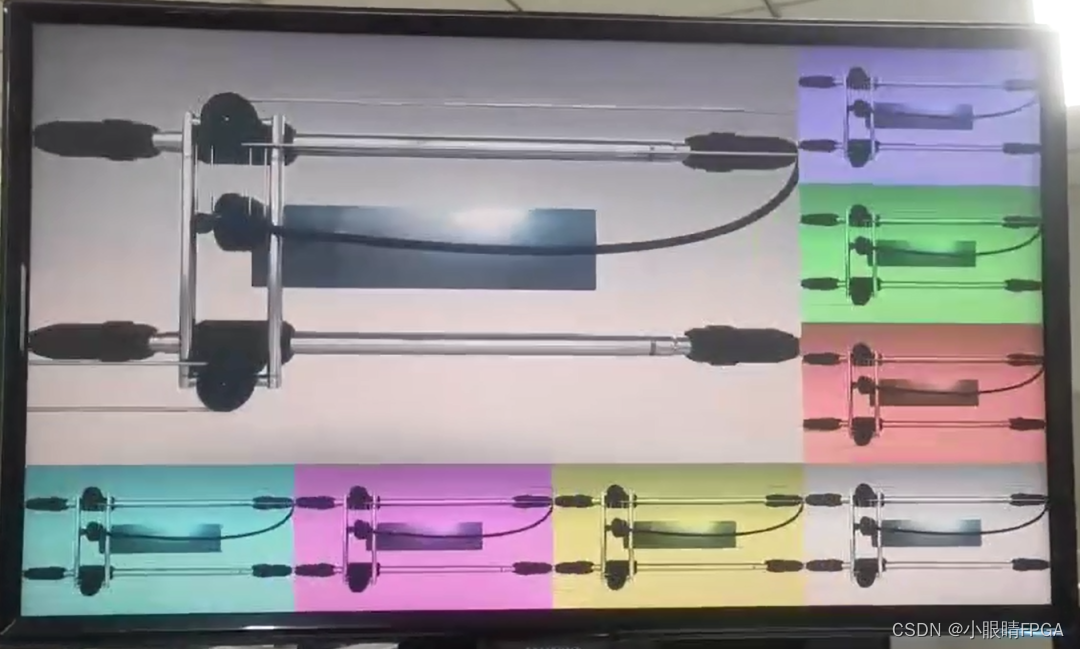
紫光同创FPGA编写的8画面分割器演示
适用于板卡型号: 紫光同创PGL50H开发平台(盘古50K开发板) 图(1) 盘古50K开发板 TOP 层逻辑框 图(2) TOP层逻辑框 video_copy_ux 将输入的一路RGB888信号复制成8份,每份画面内容相同,各路颜色有些差异: 第…...
openLayers--绘制多边形、获取视图的中心点、获取当前地图等级、设置地图等级
openLayers绘制多边形、获取视图中心点 前言效果图1、导入LineString2、创建添加多边形3、定义多变形样式4、获取当前视图的中心点5、获取当前视图等级6、设置地图等级 前言 上一篇文章在vue项目中绘制了openlayers绘制了地图和标记点,本篇文章讲解openlayers绘制多…...

CSP-31补题日记--梯度求解
202309-3-梯度求解 题目链接 http://118.190.20.162/view.page?gpidT173 最近刚刚在上数据结构二叉树 跟这道题真的是强相关 然后在就是涉及到了数学求导 这基本上是我复学两个月做的最久的题了 感觉做完这道题对栈和二叉树理解比以前清晰了很多 不摆了 上代码 ** 题目思路&am…...

MySQL 8.0.32 union 语句中文查不到数据
关键字 MySQL union 语句,中文查不到数据 问题描述 MySQL 8.0.32 union 语句,中文查不到数据 解决问题思路 1、Create a table test with two fields, such as id and name mysql>create table test ( id int unsigned auto_increment key, name…...

FlinkCDC系列:通过skipped.operations参数选择性处理新增、更新、删除数据
在flinkCDC源数据配置,通过debezium.skipped.operations参数控制,配置需要过滤的 oplog 操作。操作包括 c 表示插入,u 表示更新,d 表示删除。默认情况下,不跳过任何操作,以逗号分隔。配置多个操作ÿ…...

高压检测设备
比如:高压数字表、高压差分探头、指针式高压表、电流探枪、高压探棒 这些设备都是用来测量高压的,有的测电压,有的测电流。 高压数字表: 单独使用,功能很简单,有2个正负极探爪,把2个探爪连接到…...

Vue3问题:如何实现组件拖拽实时预览功能?
前端功能问题系列文章,点击上方合集↑ 序言 大家好,我是大澈! 本文约3000字,整篇阅读大约需要5分钟。 本文主要内容分三部分,第一部分是需求分析,第二部分是实现步骤,第三部分是问题详解。 …...

基于jsp的采购管理系统的分析与实现
物资采购管理系统是针对内部而设计的,应用于的局域网,这样可以使得内部管理更有效的联系起来。企业采购管理系统是将IT技术用于企业采购信息的管理, 它能够收集与存储企业采购的档案信息,提供更新与检索企业采购信息档案的接口;提…...

react配置二级路由
1.在createBrowserRouter上添加basename属性,比如 const RouterRender createBrowserRouter([{path: /,element: <App><Login></Login></App>},...SystemRouter,...InventoryRouter,...FlowManageRouter,{path: "*",element: &…...
C++ 模板特化
非类型模板参数 定义:对于函数模板和类模板,模板参数并不局限于类型,普通值也可以作为模板参数 非类型模板参数定义的是常量 template<typename T, size_t N> class array; //T:类型模板参数 //N:非类型模板参…...

Spring-createBean部分源码
createBean源码: /*** Central method of this class: creates a bean instance,* populates the bean instance, applies post-processors, etc.* see #doCreateBean*/ Override protected Object createBean(String beanName, RootBeanDefinition mbd, Nullable …...
2015年亚太杯APMCM数学建模大赛C题识别网络中的错误连接求解全过程文档及程序
2015年亚太杯APMCM数学建模大赛 C题 识别网络中的错误连接 原题再现 网络是描述真实系统结构的强大工具——社交网络描述人与人之间的关系,万维网描述网页之间的超链接关系。随着现代技术的发展,我们积累了越来越多的网络数据,但这些数据部…...
和空值合并运算符(??))
js:可选链运算符(?.)和空值合并运算符(??)
文档: 可选链运算符(?.)https://developer.mozilla.org/zh-CN/docs/Web/JavaScript/Reference/Operators/Optional_chaining空值合并运算符(??)https://developer.mozilla.org/zh-CN/docs/Web/JavaScript/Referenc…...

【Java 进阶篇】Java ServletContext功能:获取文件服务器路径
Java ServletContext是Java EE中的一个核心接口,用于与Servlet容器进行通信,提供了许多有用的功能,包括获取文件服务器路径。在本文中,我们将详细介绍如何使用ServletContext来获取文件服务器路径,并提供示例代码以帮助…...

Android startActivity流程
1.常规调用 startActivity(new Intent(this,MainActivity.class)); 进入Activity的startActivity方法 /*** Same as {link #startActivity(Intent, Bundle)} with no options* specified.** param intent The intent to start.** throws android.content.ActivityNotFoundExc…...

高速串行接口CDR锁定判断:从原理到实战的验证方法论
1. 项目概述:理解CDR锁定的核心价值在数字电路设计,特别是高速串行接口(如PCIe、USB、SATA、DDR)和时钟数据恢复(CDR)电路验证中,“CDR成功锁定”是一个决定系统能否正常工作的“生命线”信号。…...
)
用Python搞定常微分方程:从经典RK4到隐式IRK6的保姆级代码对比(附避坑指南)
Python数值解微分方程实战:从RK4到IRK6的算法选择与避坑指南 微分方程数值解法是工程计算中的核心技能,但面对十几种龙格库塔方法时,很多开发者会陷入选择困难。本文将用可复用的Python代码,带你穿透显式RK4与隐式IRK6的迷雾。 1.…...

告别刺耳噪音!ESP32 PWM驱动无源蜂鸣器,从调频到调占空比的音效实战
ESP32音效魔法:PWM驱动无源蜂鸣器的进阶实战指南 从刺耳噪音到悦耳旋律的蜕变之旅 当无源蜂鸣器发出刺耳的"滴滴"声时,很多创客的第一反应是降低音量或缩短发声时间。但真正的解决方案藏在ESP32的PWM(脉冲宽度调制)模块…...

T507-H平台Linux实时化实战:RT-Preempt补丁移植与性能调优
1. 项目概述与背景最近在做一个车载信息娱乐系统的预研项目,客户对系统的响应延迟有硬性指标要求,这就逼得我们必须对底层Linux内核的实时性做深度优化。选型阶段,我们盯上了全志的T507-H平台,这是一颗面向汽车电子的四核A53处理器…...

B站m4s转MP4终极指南:一键解决缓存视频兼容性问题
B站m4s转MP4终极指南:一键解决缓存视频兼容性问题 【免费下载链接】m4s-converter 一个跨平台小工具,将bilibili缓存的m4s格式音视频文件合并成mp4 项目地址: https://gitcode.com/gh_mirrors/m4/m4s-converter 你是否曾经遇到过这样的困扰&#…...

本地大模型部署的Python“翻译官“:llama-cpp-python深度解析
本地大模型部署的Python"翻译官":llama-cpp-python深度解析 【免费下载链接】llama-cpp-python Python bindings for llama.cpp 项目地址: https://gitcode.com/gh_mirrors/ll/llama-cpp-python 你是否曾为云端API的延迟而焦虑?是否担心…...
)
告别卡顿!用WebRTC-Streamer在浏览器里丝滑播放海康/大华监控(附完整代码)
告别卡顿!用WebRTC-Streamer在浏览器里丝滑播放海康/大华监控(附完整代码) 监控视频的实时查看一直是许多开发者和运维人员头疼的问题。传统的解决方案如Flash早已被淘汰,而基于FLV.js的方案又常常面临延迟高、卡顿、标签页切换暂…...

别再复制粘贴了!深度解析STM32F429的OLED驱动代码,让你的显示更稳定
从能用走向卓越:STM32F429 OLED驱动深度优化实战 在嵌入式开发中,OLED显示屏因其高对比度、低功耗和快速响应等优势,成为许多项目的首选显示方案。然而,很多开发者在使用STM32F429驱动OLED时,往往止步于"能用&quo…...

对比官方直连体验Taotoken在模型调用稳定性上的差异感受
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 对比官方直连体验Taotoken在模型调用稳定性上的差异感受 作为一名长期与各类大模型API打交道的开发者,我习惯于直接调用…...

盘点6款优质客户销售管理系统:全业务打通到垂直场景适配
前言在数字化转型的深水区,企业对于管理工具的需求已从单一的工具辅助转向全链路的业务协同。面对市场上纷繁复杂的SaaS产品,如何基于“客户信息管理、销售机会管理、表单流程、数据统计、移动端端支持、自动化、权限安全、系统集成”八大核心维度进行精…...