cesium常用方法汇集(工具篇)
1.Scene.prototype.pickPositionWorldCoordinates 根据屏幕坐标获取世界坐标
2,Scene.prototype.pickPosition 根据屏幕坐标获取世界坐标
3,Scene.prototype.drillPick 通过屏幕坐标拾取多个对象
4,Scene.prototype.pickFromRay 通过射线拾取第一个3d对象
5,Scene.prototype.drillPickFromRay 通过射线拾取多个3d对象
6,Scene.prototype.pickFromRayMostDetailed 异步拾取3d对象
7, Scene.prototype.drillPickFromRayMostDetailed 异步拾取多个3d对象
8,Scene.prototype.sampleHeight 根据当前弧度坐标获取3d高度
9,Scene.prototype.clampToHeight 根据当前世界坐标位置获取3d对象
10,Scene.prototype.sampleHeightMostDetailed异步获取当前位置的高度
11,Scene.prototype.clampToHeightMostDetailed 异步获取当前位置的3d对象
12,Scene.prototype.cartesianToCanvasCoordinates 世界坐标转canvas坐标
13,Camera.prototype.pickEllipsoid 根据屏幕坐标返回椭球体坐标或者2维地图上的坐标
14,Camera.prototype.getPickRay 以相机位置为起点,屏幕坐标位置为终点做一条射线
15,Scene.prototype.requestRender 手动场景渲染,每调一次手动触发一次渲染
16,Scene.prototype.forceRender 强制场景进行渲染
17,Scene.prototype.pick 通过屏幕坐标拾取3d对象
18,Camera.prototype.distanceToBoundingSphere 相机到椭球体的距离
19,Camera.prototype.viewBoundingSphere 将相机看向球体中心
20,Camera.prototype.flyToBoundingSphere 飞向球体中心
21,getRectangleCameraCoordinates 通过视图矩形获取相机位置
21,Camera.prototype.computeViewRectangle 返回相机在球体上的可视范围矩形
22,Cesium.Cartesian3.lerp 根据两个点和插值数量进行插值
23.Quaternion.fromAxisAngle 沿某个轴旋转角度之后,返回新的位置,是一个四元数
24,获取视图范围 varRectangle =this.viewer.camera.computeViewRectangle();
25,获取Zoom this.viewer.camera.moveEnd.addEventListener(this.onMoveendMap);//监听地图移动完成事件onMoveendMap = () => {
const me =this;//获取当前相机高度let height = Math.ceil(me.viewer.camera.positionCartographic.height);
let zoom = me.heightToZoom(height);
26,Globe.prototype.pick 返回地球上相交的点
27,Globe.prototype.pickWorldCoordinates 返回地球上相交点的坐标
28,Cesium.sampleTerrainMostDetailed(terrainProvider, positions);根据地形求地形上点的高度
29,Globe.prototype.getHeight(cartographic)根据经纬度获取地球上的高度
30,new Cesium.HeadingPitchRoll(Math.PI, Math.PI, Math.PI);设置欧拉角 弧度
31,HeadingPitchRoll.fromQuaternion = function (quaternion, result) 从四元数转成欧拉角
32,HeadingPitchRoll.fromDegrees = function (heading, pitch, roll, result) 用经纬度生成欧拉角
33.Plane.projectPointOntoPlane = function (plane, point, result)点到平面的投影
34.Plane.getPointDistance = function (plane, point)点到平面的距离
35.Transforms.eastNorthUpToFixedFrame 传入一个世界坐标,以地球东-北-上方向为参考系生成一个矩阵
36.Transforms.northEastDownToFixedFrame 传入一个世界坐标,以地球北-东-下方向为参考系生成一个矩阵
37.Transforms.headingPitchRollToFixedFrame(origin,headingPitchRoll) 传入一个坐标和欧拉角得到一个矩阵
38.Transforms.headingPitchRollQuaternion(origin,headingPitchRoll) 传入一个坐标和欧拉角得到一个四元数
39.Transforms.fixedFrameToHeadingPitchRoll 传入一个矩阵得到欧拉角
40.SceneTransforms.wgs84ToWindowCoordinates (scene, position, result) 将场景里的某个世界坐标位置转成屏幕坐标
41.SceneTransforms.wgs84ToDrawingBufferCoordinates(scene, position, result) 将场景里的某个世界坐标位置转成换图形缓冲区坐标
42.SceneTransforms.transformWindowToDrawingBuffer(scene,windowPosition,result)将屏幕坐标转换成图形缓冲区坐标
43.SceneTransforms.clipToGLWindowCoordinates(viewport,position,result)将裁剪坐标转成窗口坐标
44.SceneTransforms.drawingBufferToWgs84Coordinates(scene,drawingBufferPosition,depth,result)将缓冲区坐标转成世界坐标
转载:
作者:panergongzi
链接:http://events.jianshu.io/p/74a51c7459d2
来源:简书
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
相关文章:
)
cesium常用方法汇集(工具篇)
1.Scene.prototype.pickPositionWorldCoordinates 根据屏幕坐标获取世界坐标 2,Scene.prototype.pickPosition 根据屏幕坐标获取世界坐标 3,Scene.prototype.drillPick 通过屏幕坐标拾取多个对象 4,Scene.prototype.pickFromRay 通过射线拾…...
)
分布式一致性与共识算法(一)
这里写目录标题是什么ACIDCAP组合一致性概念共识为什么需要共识算法会如何发展列举Paxos算法ZAB(Zookeeper Atomic Broadcast)协议Raft 算法参考引用是什么 从实现效果上来说,很多人或多或少都了解或者设计过具有强一致性的系统。但是&#…...
)
C++---最长上升子序列模型---怪盗基德的滑翔翼(每日一道算法2023.2.27)
注意事项: 本题为"线性dp—最长上升子序列的长度"的扩展题,所以dp思路这里就不再赘述。 题目: 怪盗基德是一个充满传奇色彩的怪盗,专门以珠宝为目标的超级盗窃犯。 而他最为突出的地方,就是他每次都能逃脱中…...
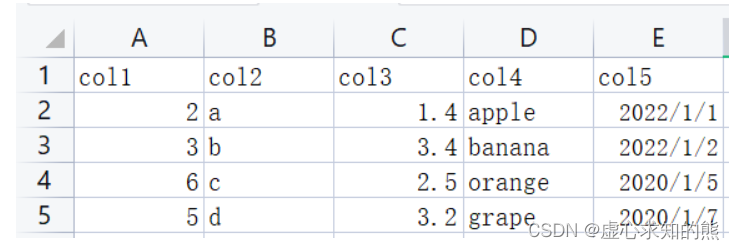
Python 之 Pandas 文件操作和读取 CSV 参数详解
文章目录一、Pandas 读取文件二、CSV 文件读取1. 基本参数2. 通用解析参数3. 空值处理相关参数4. 时间处理相关参数5. 分块读入相关参数一、Pandas 读取文件 当使用 Pandas 做数据分析的时,需要读取事先准备好的数据集,这是做数据分析的第一步。Panda 提…...

微服务的异步通信技术RabbitMQ
文章目录前言1.WorkQueue(工作队列)消息预取机制2.Publish&Subscribe(发布-订阅)1.Fanout(广播)2.DirectExchange(路由)3.TopicExchange(话题)MQ的优点前…...
Word处理控件Aspose.Words功能演示:使用 C++ 在 Word (DOC/DOCX) 中添加或删除水印
Aspose.Words 是一种高级Word文档处理API,用于执行各种文档管理和操作任务。API支持生成,修改,转换,呈现和打印文档,而无需在跨平台应用程序中直接使用Microsoft Word。此外, Aspose API支持流行文件格式处…...
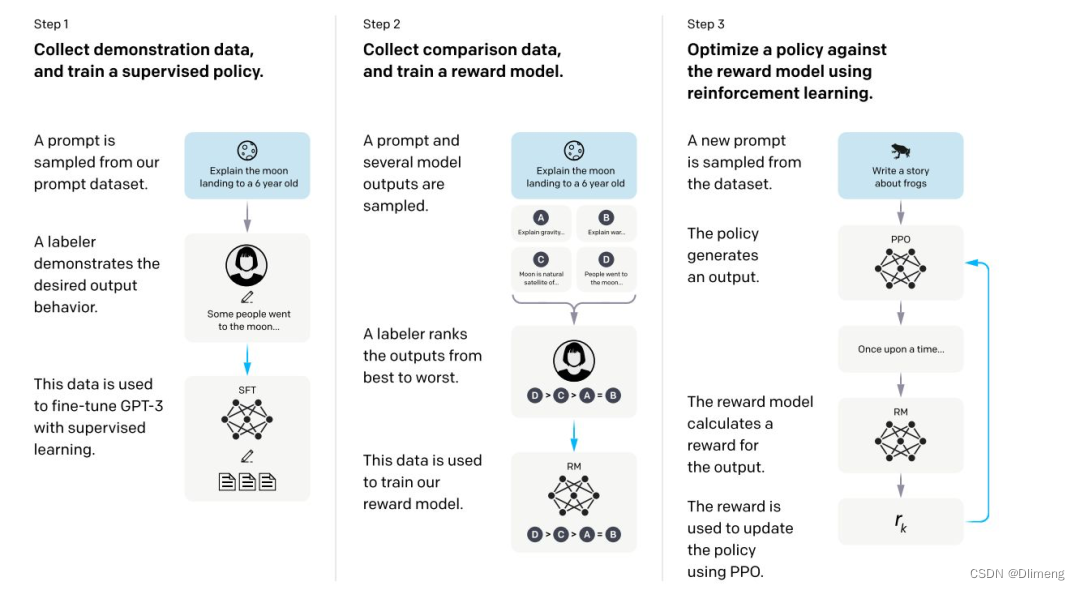
chatGPT模型原理
文章目录简介BertGPT 初代GPT-2GPT-3chatGPT开源ChatGPT简介 openai 的 GPT 大模型的发展历程。 Bert 2018年,自然语言处理 NLP 领域也步入了 LLM 时代,谷歌出品的 Bert 模型横空出世,碾压了以往的所有模型,直接在各种NLP的建模…...
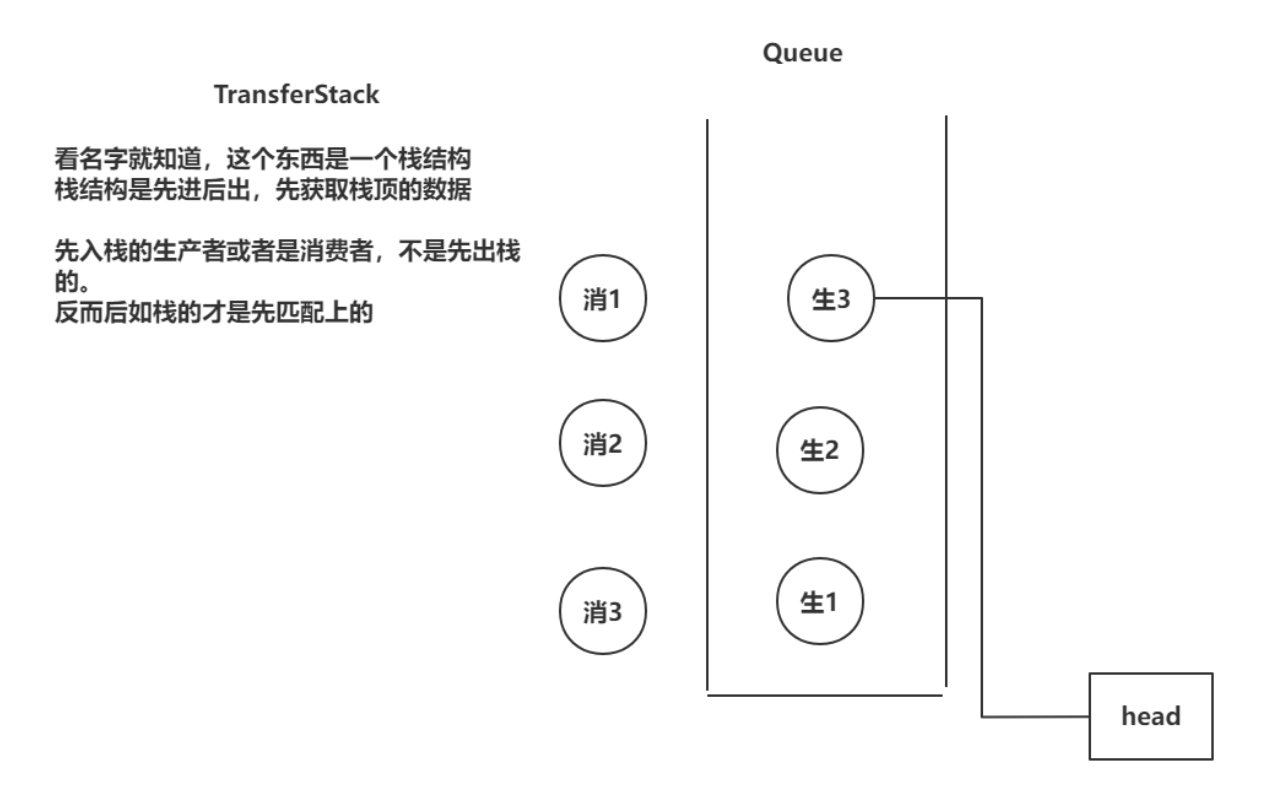
四、阻塞队列
文章目录基础概念生产者消费者概念JUC阻塞队列的存取方法ArrayBlockingQueueArrayBlockingQueue的基本使用生产者方法实现原理ArrayBlockingQueue的常见属性add方法实现offer方法实现offer(time,unit)方法put方法消费者方法实现原理remove方法poll方法poll(time,unit)方法take方…...
企业电子招投标采购系统源码之登录页面
信息数智化招采系统 服务框架:Spring Cloud、Spring Boot2、Mybatis、OAuth2、Security 前端架构:VUE、Uniapp、Layui、Bootstrap、H5、CSS3 涉及技术:Eureka、Config、Zuul、OAuth2、Security、OSS、Turbine、Zipkin、Feign、Monitor、…...
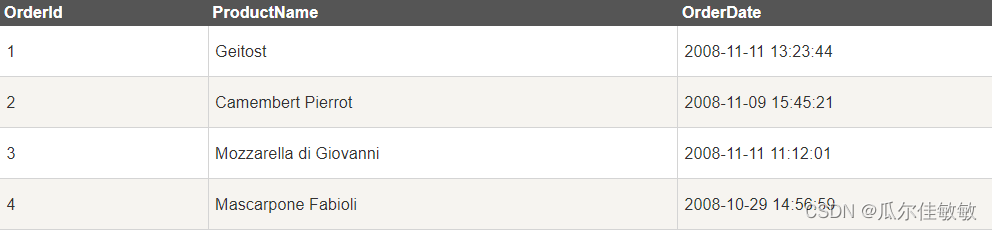
SQL零基础入门学习(十三)
上一篇(SQL零基础入门学习(十二)) SQL 视图(Views) 视图是可视化的表。 SQL CREATE VIEW 语句 在 SQL 中,视图是基于 SQL 语句的结果集的可视化的表。 视图包含行和列,就像一个…...

Java实现简单KV数据库
用Java实现一个简单的KV数据库 开发思路: 用map存储数据,再用一个List记录操作日志,开一个新线程将List中的操作写入日志文件中,再开一个线程用于网络IO服务接收客户端的命令,再启动时检查日志,如果有数据就…...

【Spark分布式内存计算框架——Spark Streaming】5. DStream(上)
3. DStream SparkStreaming模块将流式数据封装的数据结构:DStream(Discretized Stream,离散化数据流,连续不断的数据流),代表持续性的数据流和经过各种Spark算子操作后的结果数据流。 3.1 DStream 是什么…...
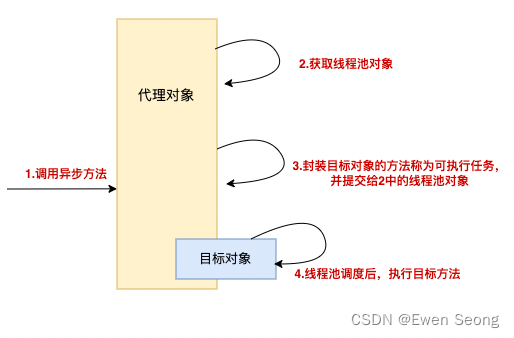
Spring系列-9 Async注解使用与原理
背景: 本文作为Spring系列的第九篇,介绍Async注解的使用、注意事项和实现原理,原理部分会结合Spring框架代码进行。 本文可以和Spring系列-8 AOP原理进行比较阅读 1.使用方式 Async一般注解在方法上,用于实现方法的异步…...

Python自动化测试实战篇(6)用PO分层模式及思想,优化unittest+ddt+yaml+request登录接口自动化测试
这些是之前的文章,里面有一些基础的知识点在前面由于前面已经有写过,所以这一篇就不再详细对之前的内容进行描述 Python自动化测试实战篇(1)读取xlsx中账户密码,unittest框架实现通过requests接口post登录网站请求&…...

Linux 进程:父子进程
目录一、了解子进程二、创建子进程1.创建子进程2.区分父子进程三、理解子进程四、创建子进程的意义进程就是运行中的应用程序,如果一个程序较为庞大,我们可以给这个程序创建多个进程,每个进程负责一部分代码的运行。 A进程如果创建了B进程&am…...
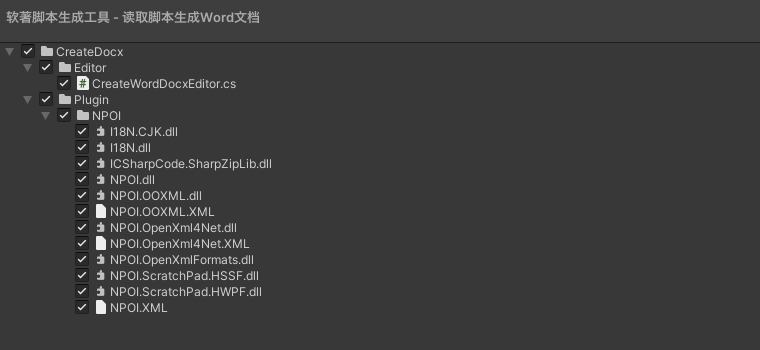
Unity 之 实现读取代码写进Word文档功能实现 -- 软著脚本生成工具
Unity 之 实现读取代码写进Word文档功能前言一,实现步骤1.1 逻辑梳理1.2 用到工具二,实现读写文件2.1 读取目录相关2.2 读写文件三,编辑器拓展3.1 编辑器拓展介绍3.2 实现界面可视化四,源码分享4.1 工具目录4.2 完整代码前言 之所…...
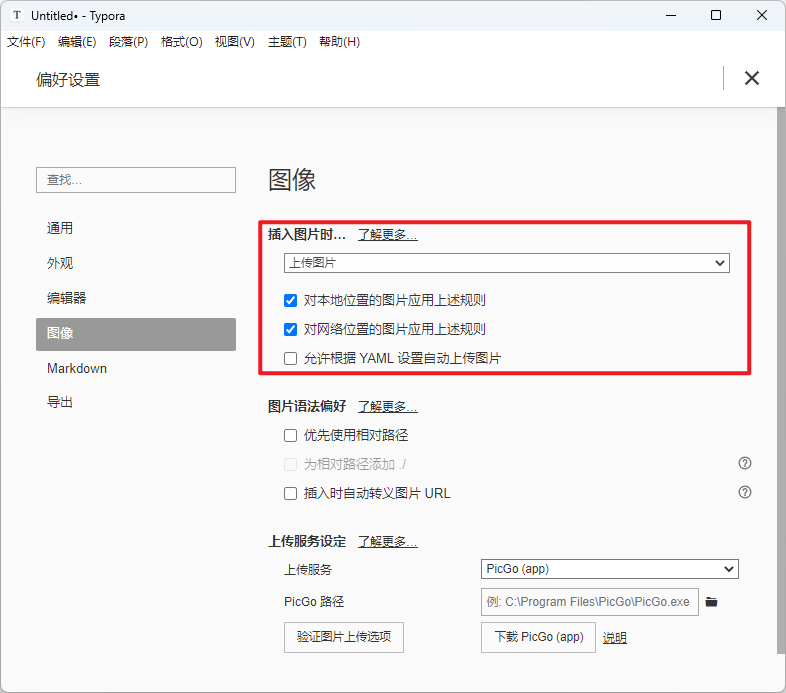
Typora图床配置:Typora + PicGo + 阿里云OSS
文章目录一、前景提要二、相关链接三、搭建步骤1. 购买阿里云对象存储OSS2. 对象存储OSS:创建Bucket3. 阿里云:添加OSS访问用户及权限4. 安装Typora5. 配置PicGo方法一:使用PicGo-Core (Command line)方法二:使用PicGo(app)6. 最后…...

二进制搭建以太坊2.0节点-2023最新详细版文档
文章目录 一、配置 JWT 认证二、部署执行节点geth2.1 下载geth二进制文件2.2 geth节点启动三、部署共识节点Prysm3.1 下载Prysm脚本3.2 Prysm容器生成四、检查节点是否同步完成4.1 检查geth执行节点4.2 检查prysm共识节点4.3 geth常用命令五、节点同步详细说明5.1 启动时日志5.…...
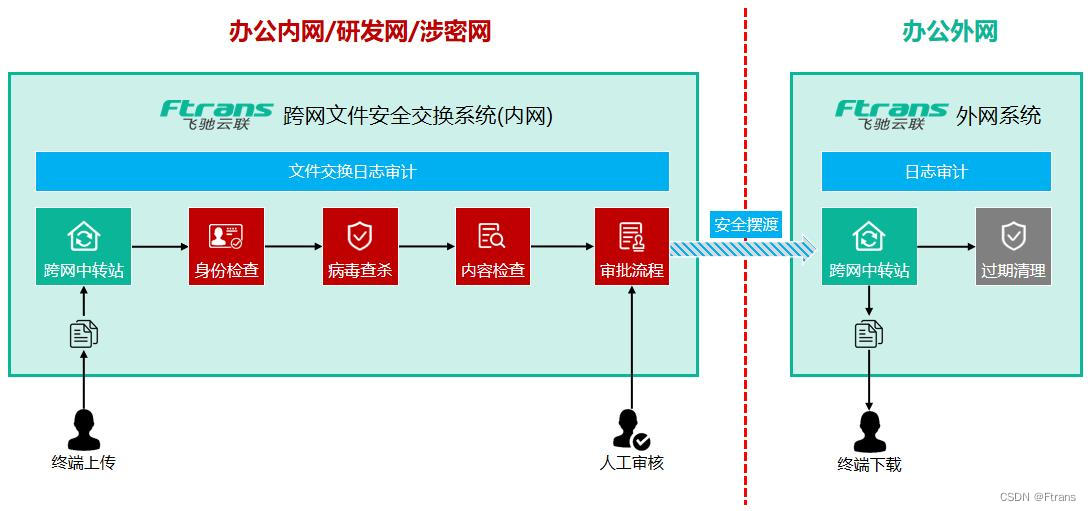
如何简化跨网络安全域的文件发送流程,大幅降低IT人员工作量?
为什么要做安全域的隔离? 随着企业数字化转型的逐步深入,企业投入了大量资源进行信息系统建设,信息化程度日益提升。在这一过程中,企业也越来越重视核心数据资产的保护,数据资产的安全防护成为企业面临的重大挑战。 …...

带你深入了解c语言指针后续
前言 🎈个人主页:🎈 :✨✨✨初阶牛✨✨✨ 🐻推荐专栏: 🍔🍟🌯 c语言进阶 🔑个人信条: 🌵知行合一 🍉本篇简介:>:介绍c语言中有关指针更深层的知识. 金句分享: ✨在该…...

2026年中小企业性能测试平台:低成本易落地选型指南
中小企业在性能测试方面面临痛点:专业测试人员匮乏、预算有限、IT 架构相对简单、测试需求集中在基础接口与核心业务场景,无需复杂的企业级管控与大规模并发压测能力。因此,中小企业对性能测试平台的核心需求是:低成本、易落地、易…...
)
汽车资讯网站|基于springboot+vue的汽车资讯网站(源码+数据库+文档)
汽车资讯网站 目录 基于springbootvue的汽车资讯网站 一、前言 二、系统设计 三、系统功能设计 四、数据库设计 五、核心代码 六、论文参考 七、最新计算机毕设选题推荐 八、源码获取: 博主介绍:✌️大厂码农|毕设布道师,阿里云开…...

Seelen UI定制化桌面
链接:https://pan.quark.cn/s/0d0312d1a6d1Seelen UI是适用于 Windows 10/11的第一个基于 Web 的完全可定制的桌面环境,提供了一种直观而强大的方式来管理和自定义您的工作区。提升工作效率与体验,满足不同用户的需求。...

还在为外语游戏和视频发愁?这款实时屏幕翻译神器让你秒懂一切!
还在为外语游戏和视频发愁?这款实时屏幕翻译神器让你秒懂一切! 【免费下载链接】Translumo Advanced real-time screen translator for games, hardcoded subtitles in videos, static text and etc. 项目地址: https://gitcode.com/gh_mirrors/tr/Tra…...

运营商Palantir本体论落地思考
在运营商数字化转型的浪潮中,数据平台建设已经不是什么新鲜事。大多数省级运营商都已经有了自己的数据中台、数据湖或者BI系统,能看到数据、能做报表、能出分析。但问题来了:**看到数据之后呢?**分析完了,客户可能离网…...

黑莓BB10失败启示录:操作系统生态竞争与品牌转型的经典案例
1. 项目概述:一场关于键盘的“信仰崩塌”作为一名在消费电子和移动通信领域摸爬滚打了十几年的从业者,我见过太多产品的起起落落。但2012年5月1日,在奥兰多黑莓世界大会上发生的那一幕,至今回想起来,依然能让我清晰地感…...
)
GDB调试实战:如何像本地变量一样轻松查看函数参数和结构体成员(附常用命令清单)
GDB调试实战:像本地变量一样高效查看函数参数与复杂数据结构 调试大型C/C项目时,最令人头疼的莫过于面对层层嵌套的函数调用和包含数十个成员的结构体。传统调试方式往往让我们陷入内存地址的泥潭,而GDB提供的诸多高级功能可以彻底改变这一局…...

在VS Code中结合Taotoken实现稳定的AI编程辅助体验
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 在VS Code中结合Taotoken实现稳定的AI编程辅助体验 对于日常使用VS Code进行开发的程序员而言,一个稳定、不间断的AI编…...
的研究者如何让AI记忆力翻倍)
香港科技大学(广州)的研究者如何让AI记忆力翻倍
这项由香港科技大学(广州)主导的研究成果发表于2026年第43届国际机器学习大会(ICML 2026),会议地点为韩国首尔,论文收录于PMLR第306卷。论文预印本编号为arXiv:2605.05838,有兴趣深入了解的读者…...

iPad协议开发老哥的避坑指南
兄弟们,在微信私域开发这条路上摸爬滚打了好几年,试过各种方案踩过无数坑,今天终于能给大家分享一个真正用着顺手、技术扎实的「宝藏工具」了——wechatapi 的 iPad 协议接口。作为过来人,真心想把这份「避坑指南」和开发经验掏心…...