uboot启动linux kernel的流程
目录
- 前言
- 流程图
- autoboot_command
- run_command_list
- do_bootm
- do_bootm_states
- do_bootm_linux
- boot_prep_linux
- boot_jump_linux
前言
本文在u-boot启动流程分析这篇文章的基础上,简要梳理uboot启动linux kernel的流程。
流程图
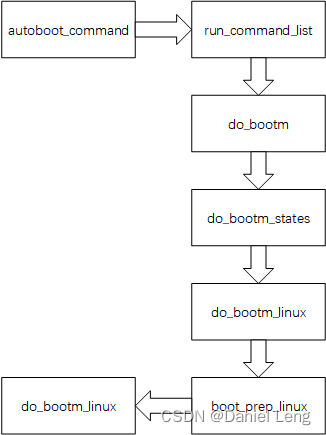
其中,
- autoboot_command位于uboot/common/autoboot.c
- run_command_list位于uboot/common/cli.c
- do_bootm位于uboot/cmd/bootm.c
- do_bootm_states位于uboot/common/bootm.c
- do_bootm_linux位于uboot/arch/arm/lib/bootm.c
- boot_prep_linux位于uboot/arch/arm/lib/bootm.c
- boot_jump_linux位于uboot/arch/arm/lib/bootm.c
autoboot_command
void autoboot_command(const char *s)
{debug("### main_loop: bootcmd=\"%s\"\n", s ? s : "<UNDEFINED>");if (s && (stored_bootdelay == -2 ||(stored_bootdelay != -1 && !abortboot(stored_bootdelay)))) {bool lock;int prev;lock = IS_ENABLED(CONFIG_AUTOBOOT_KEYED) &&!IS_ENABLED(CONFIG_AUTOBOOT_KEYED_CTRLC);if (lock)prev = disable_ctrlc(1); /* disable Ctrl-C checking */run_command_list(s, -1, 0);if (lock)disable_ctrlc(prev); /* restore Ctrl-C checking */}if (IS_ENABLED(CONFIG_USE_AUTOBOOT_MENUKEY) &&menukey == AUTOBOOT_MENUKEY) {s = env_get("menucmd");if (s)run_command_list(s, -1, 0);}
}
其中,abortboot会等待一段时间timeout(由环境变量bootdelay设定),
如果有按键被按下,则会返回1,此时将停止启动linux kernel,返回命令行。如果在timeout后依然无按键被按下,则继续执行启动linux kernel的命令。
run_command_list
run_command_list调用do_bootm的流程实现的关键点:

在上面的代码中,将"bootm"和do_bootm这个函数绑定。
U_BOOT_CMD的定义在uboot/include/command.h中,可以自行查看源代码。
do_bootm
int do_bootm(struct cmd_tbl *cmdtp, int flag, int argc, char *const argv[])
{
#ifdef CONFIG_NEEDS_MANUAL_RELOCstatic int relocated = 0;if (!relocated) {int i;/* relocate names of sub-command table */for (i = 0; i < ARRAY_SIZE(cmd_bootm_sub); i++)cmd_bootm_sub[i].name += gd->reloc_off;relocated = 1;}
#endif/* determine if we have a sub command */argc--; argv++;if (argc > 0) {char *endp;simple_strtoul(argv[0], &endp, 16);/* endp pointing to NULL means that argv[0] was just a* valid number, pass it along to the normal bootm processing** If endp is ':' or '#' assume a FIT identifier so pass* along for normal processing.** Right now we assume the first arg should never be '-'*/if ((*endp != 0) && (*endp != ':') && (*endp != '#'))return do_bootm_subcommand(cmdtp, flag, argc, argv);}return do_bootm_states(cmdtp, flag, argc, argv, BOOTM_STATE_START |BOOTM_STATE_FINDOS | BOOTM_STATE_FINDOTHER |BOOTM_STATE_LOADOS |
#ifdef CONFIG_SYS_BOOT_RAMDISK_HIGHBOOTM_STATE_RAMDISK |
#endif
#if defined(CONFIG_PPC) || defined(CONFIG_MIPS)BOOTM_STATE_OS_CMDLINE |
#endifBOOTM_STATE_OS_PREP | BOOTM_STATE_OS_FAKE_GO |BOOTM_STATE_OS_GO, &images, 1);
}
这个函数最核心的部分就是调用do_bootm_states。
do_bootm_states
int do_bootm_states(struct cmd_tbl *cmdtp, int flag, int argc,char *const argv[], int states, bootm_headers_t *images,int boot_progress)
{boot_os_fn *boot_fn;ulong iflag = 0;int ret = 0, need_boot_fn;images->state |= states;/** Work through the states and see how far we get. We stop on* any error.*/if (states & BOOTM_STATE_START)ret = bootm_start(cmdtp, flag, argc, argv);if (!ret && (states & BOOTM_STATE_FINDOS))ret = bootm_find_os(cmdtp, flag, argc, argv);if (!ret && (states & BOOTM_STATE_FINDOTHER))ret = bootm_find_other(cmdtp, flag, argc, argv);/* Load the OS */if (!ret && (states & BOOTM_STATE_LOADOS)) {iflag = bootm_disable_interrupts();ret = bootm_load_os(images, 0);if (ret && ret != BOOTM_ERR_OVERLAP)goto err;else if (ret == BOOTM_ERR_OVERLAP)ret = 0;}/* Relocate the ramdisk */
#ifdef CONFIG_SYS_BOOT_RAMDISK_HIGHif (!ret && (states & BOOTM_STATE_RAMDISK)) {ulong rd_len = images->rd_end - images->rd_start;ret = boot_ramdisk_high(&images->lmb, images->rd_start,rd_len, &images->initrd_start, &images->initrd_end);if (!ret) {env_set_hex("initrd_start", images->initrd_start);env_set_hex("initrd_end", images->initrd_end);}}
#endif
#if IMAGE_ENABLE_OF_LIBFDT && defined(CONFIG_LMB)if (!ret && (states & BOOTM_STATE_FDT)) {boot_fdt_add_mem_rsv_regions(&images->lmb, images->ft_addr);ret = boot_relocate_fdt(&images->lmb, &images->ft_addr,&images->ft_len);}
#endif/* From now on, we need the OS boot function */if (ret)return ret;boot_fn = bootm_os_get_boot_func(images->os.os);need_boot_fn = states & (BOOTM_STATE_OS_CMDLINE |BOOTM_STATE_OS_BD_T | BOOTM_STATE_OS_PREP |BOOTM_STATE_OS_FAKE_GO | BOOTM_STATE_OS_GO);if (boot_fn == NULL && need_boot_fn) {if (iflag)enable_interrupts();printf("ERROR: booting os '%s' (%d) is not supported\n",genimg_get_os_name(images->os.os), images->os.os);bootstage_error(BOOTSTAGE_ID_CHECK_BOOT_OS);return 1;}/* Call various other states that are not generally used */if (!ret && (states & BOOTM_STATE_OS_CMDLINE))ret = boot_fn(BOOTM_STATE_OS_CMDLINE, argc, argv, images);if (!ret && (states & BOOTM_STATE_OS_BD_T))ret = boot_fn(BOOTM_STATE_OS_BD_T, argc, argv, images);if (!ret && (states & BOOTM_STATE_OS_PREP)) {ret = bootm_process_cmdline_env(images->os.os == IH_OS_LINUX);if (ret) {printf("Cmdline setup failed (err=%d)\n", ret);ret = CMD_RET_FAILURE;goto err;}ret = boot_fn(BOOTM_STATE_OS_PREP, argc, argv, images);}#ifdef CONFIG_TRACE/* Pretend to run the OS, then run a user command */if (!ret && (states & BOOTM_STATE_OS_FAKE_GO)) {char *cmd_list = env_get("fakegocmd");ret = boot_selected_os(argc, argv, BOOTM_STATE_OS_FAKE_GO,images, boot_fn);if (!ret && cmd_list)ret = run_command_list(cmd_list, -1, flag);}
#endif/* Check for unsupported subcommand. */if (ret) {puts("subcommand not supported\n");return ret;}/* Now run the OS! We hope this doesn't return */if (!ret && (states & BOOTM_STATE_OS_GO))ret = boot_selected_os(argc, argv, BOOTM_STATE_OS_GO,images, boot_fn);/* Deal with any fallout */
err:if (iflag)enable_interrupts();if (ret == BOOTM_ERR_UNIMPLEMENTED)bootstage_error(BOOTSTAGE_ID_DECOMP_UNIMPL);else if (ret == BOOTM_ERR_RESET)do_reset(cmdtp, flag, argc, argv);return ret;
}该函数的核心部分:
- bootm_load_os将kernel镜像加载到内存中。
- 调用do_bootm_linux启动kernel。
do_bootm_linux
int do_bootm_linux(int flag, int argc, char *const argv[],bootm_headers_t *images)
{/* No need for those on ARM */if (flag & BOOTM_STATE_OS_BD_T || flag & BOOTM_STATE_OS_CMDLINE)return -1;if (flag & BOOTM_STATE_OS_PREP) {boot_prep_linux(images);return 0;}if (flag & (BOOTM_STATE_OS_GO | BOOTM_STATE_OS_FAKE_GO)) {boot_jump_linux(images, flag);return 0;}boot_prep_linux(images);boot_jump_linux(images, flag);return 0;
}
- boot_prep_linux负责准备传递给kernel的参数。
- boot_jump_linux负责跳转执行kernel代码。
boot_prep_linux
static void boot_prep_linux(bootm_headers_t *images)
{char *commandline = env_get("bootargs");if (IMAGE_ENABLE_OF_LIBFDT && images->ft_len) {
#ifdef CONFIG_OF_LIBFDTdebug("using: FDT\n");if (image_setup_linux(images)) {printf("FDT creation failed! hanging...");hang();}
#endif} else if (BOOTM_ENABLE_TAGS) {debug("using: ATAGS\n");setup_start_tag(gd->bd);if (BOOTM_ENABLE_SERIAL_TAG)setup_serial_tag(¶ms);if (BOOTM_ENABLE_CMDLINE_TAG)setup_commandline_tag(gd->bd, commandline);if (BOOTM_ENABLE_REVISION_TAG)setup_revision_tag(¶ms);if (BOOTM_ENABLE_MEMORY_TAGS)setup_memory_tags(gd->bd);if (BOOTM_ENABLE_INITRD_TAG) {/** In boot_ramdisk_high(), it may relocate ramdisk to* a specified location. And set images->initrd_start &* images->initrd_end to relocated ramdisk's start/end* addresses. So use them instead of images->rd_start &* images->rd_end when possible.*/if (images->initrd_start && images->initrd_end) {setup_initrd_tag(gd->bd, images->initrd_start,images->initrd_end);} else if (images->rd_start && images->rd_end) {setup_initrd_tag(gd->bd, images->rd_start,images->rd_end);}}setup_board_tags(¶ms);setup_end_tag(gd->bd);} else {printf("FDT and ATAGS support not compiled in - hanging\n");hang();}board_prep_linux(images);
}
可以看到,u-boot使用的是tag的方式传参。共计分为以下几类tag:
- setup_serial_tag设定与板子序列号(64位)相关的参数。
- setup_commandline_tag设置命令行启动参数,参数来自环境变量"bootargs"。
- setup_revision_tag 设置修订版本。
- setup_memory_tags设置内存区块相关参数。
- setup_initrd_tag设置ramdisk相关的参数。
注:以上参数并非都是必要的。
boot_jump_linux
static void boot_jump_linux(bootm_headers_t *images, int flag)
{
#ifdef CONFIG_ARM64void (*kernel_entry)(void *fdt_addr, void *res0, void *res1,void *res2);int fake = (flag & BOOTM_STATE_OS_FAKE_GO);kernel_entry = (void (*)(void *fdt_addr, void *res0, void *res1,void *res2))images->ep;debug("## Transferring control to Linux (at address %lx)...\n",(ulong) kernel_entry);bootstage_mark(BOOTSTAGE_ID_RUN_OS);announce_and_cleanup(fake);if (!fake) {
#ifdef CONFIG_ARMV8_PSCIarmv8_setup_psci();
#endifdo_nonsec_virt_switch();update_os_arch_secondary_cores(images->os.arch);#ifdef CONFIG_ARMV8_SWITCH_TO_EL1armv8_switch_to_el2((u64)images->ft_addr, 0, 0, 0,(u64)switch_to_el1, ES_TO_AARCH64);
#elseif ((IH_ARCH_DEFAULT == IH_ARCH_ARM64) &&(images->os.arch == IH_ARCH_ARM))armv8_switch_to_el2(0, (u64)gd->bd->bi_arch_number,(u64)images->ft_addr, 0,(u64)images->ep,ES_TO_AARCH32);elsearmv8_switch_to_el2((u64)images->ft_addr, 0, 0, 0,images->ep,ES_TO_AARCH64);
#endif}
#elseunsigned long machid = gd->bd->bi_arch_number;char *s;void (*kernel_entry)(int zero, int arch, uint params);unsigned long r2;int fake = (flag & BOOTM_STATE_OS_FAKE_GO);kernel_entry = (void (*)(int, int, uint))images->ep;
#ifdef CONFIG_CPU_V7Mulong addr = (ulong)kernel_entry | 1;kernel_entry = (void *)addr;
#endifs = env_get("machid");if (s) {if (strict_strtoul(s, 16, &machid) < 0) {debug("strict_strtoul failed!\n");return;}printf("Using machid 0x%lx from environment\n", machid);}debug("## Transferring control to Linux (at address %08lx)" \"...\n", (ulong) kernel_entry);bootstage_mark(BOOTSTAGE_ID_RUN_OS);announce_and_cleanup(fake);if (IMAGE_ENABLE_OF_LIBFDT && images->ft_len)r2 = (unsigned long)images->ft_addr;elser2 = gd->bd->bi_boot_params;if (!fake) {
#ifdef CONFIG_ARMV7_NONSECif (armv7_boot_nonsec()) {armv7_init_nonsec();secure_ram_addr(_do_nonsec_entry)(kernel_entry,0, machid, r2);} else
#endifkernel_entry(0, machid, r2);}
#endif
}
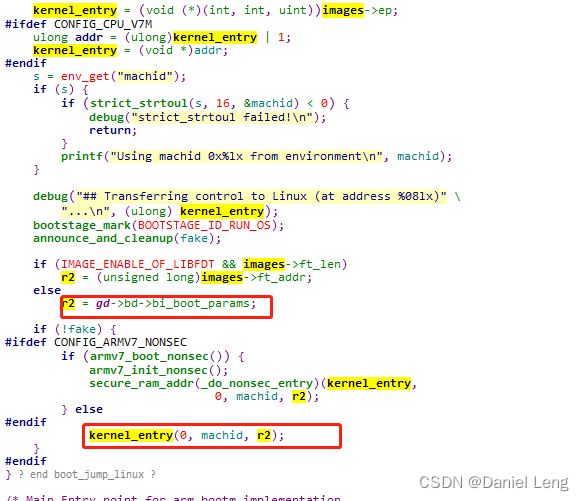
-
r2 = gd->bd->bi_boot_params; 是将TAG列表所在的内存地址赋值给通用寄存器R2。
-
kernel_entry(0, machid, r2); 跳转执行kernel的代码(自此uboot的使命完成,生命周期结束)。
综上,Uboot传递给linux kernel的参数是通过R2传递的。当linux kernel启动后,会从R2中拿到TAG列表的地址,然后将TAG参数解析出来使用。
相关文章:
uboot启动linux kernel的流程
目录 前言流程图autoboot_commandrun_command_listdo_bootmdo_bootm_statesdo_bootm_linuxboot_prep_linuxboot_jump_linux 前言 本文在u-boot启动流程分析这篇文章的基础上,简要梳理uboot启动linux kernel的流程。 流程图 其中, autoboot_command位于…...

垃圾回收系统小程序定制开发搭建攻略
在这个数字化快速发展的时代,垃圾回收系统的推广对于环境保护和可持续发展具有重要意义。为了更好地服务于垃圾回收行业,本文将分享如何使用第三方制作平台乔拓云网,定制开发搭建垃圾回收系统小程序。 首先,使用乔拓云网账号登录平…...

可变参数模板
1. sizeof...计算参数个数 template<typename... Ts> void magic(Ts... args) {std::cout << sizeof...(args) << std::endl; } 2.递归模板函数 template<typename T> void printf1(T value) {std::cout << value << std::endl; }templ…...

坐公交:内外向乘客依序选座(python字典、字符串、元组)
n排宽度不一的座位,每排2座,2n名内外向乘客依序上车按各自喜好选座。 (笔记模板由python脚本于2023年11月05日 21:49:31创建,本篇笔记适合熟悉python列表list、字符串str、元组tuple的coder翻阅) 【学习的细节是欢悦的历程】 Python 官网&…...

十年老程序员分享13个最常用的Python深度学习库和介绍,赶紧收藏码住!
文章目录 前言CaffeTheanoTensorFlowLasagneKerasmxnetsklearn-theanonolearnDIGITSBlocksdeepypylearn2Deeplearning4j关于Python技术储备一、Python所有方向的学习路线二、Python基础学习视频三、精品Python学习书籍四、Python工具包项目源码合集①Python工具包②Python实战案…...
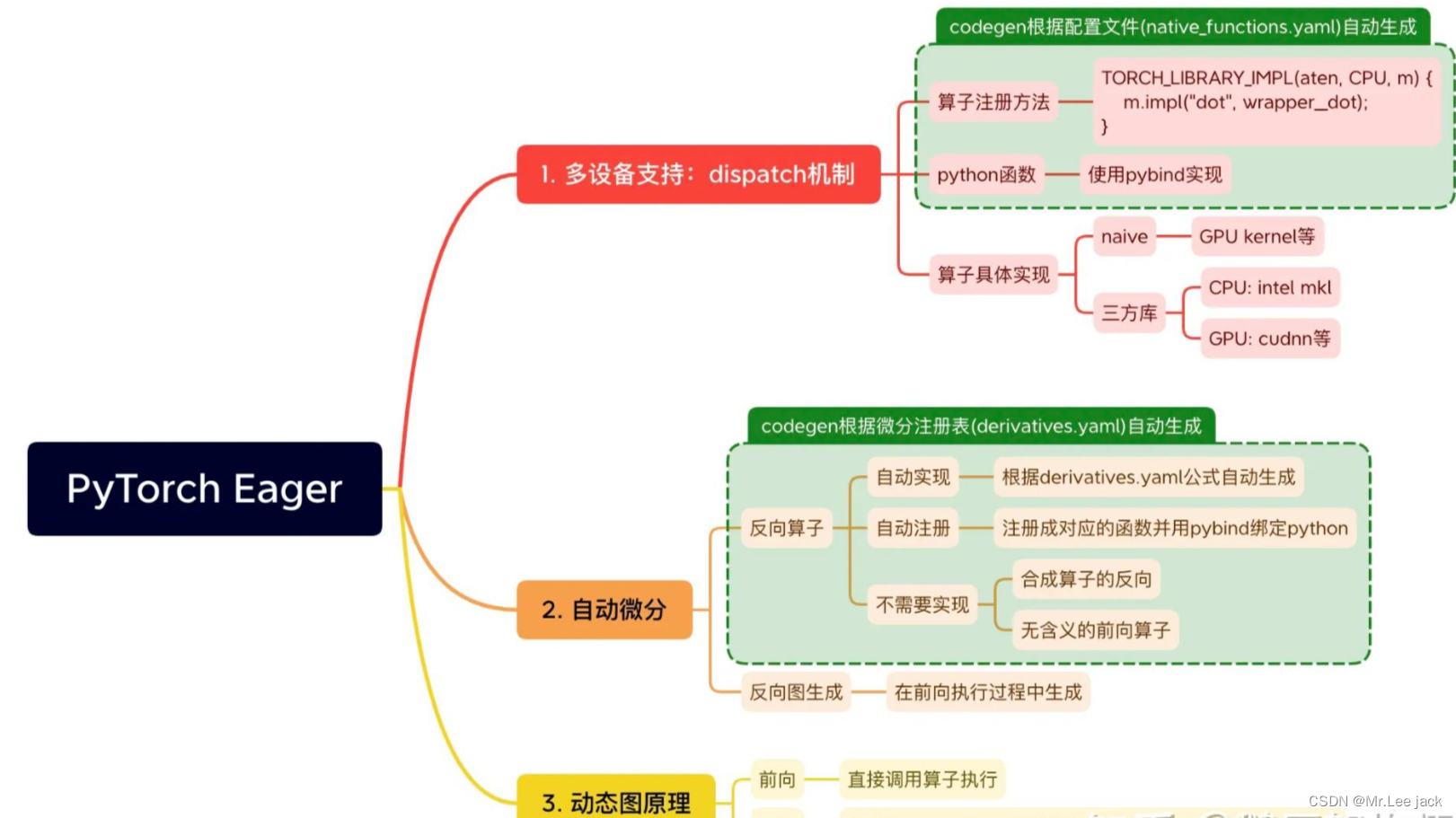
【pytorch源码分析--torch执行流程与编译原理】
背景 解读torch源码方便算子开发方便后续做torch 模型性能开发 基本介绍 代码库 https://github.com/pytorch/pytorch 模块介绍 aten: A Tensor Library的缩写。与Tensor相关的内容都放在这个目录下。如Tensor的定义、存储、Tensor间的操作(即算子/OPÿ…...

编辑器报警处理
1、warning CS8600: 将 null 文本或可能的 null 值转换为不可为 null 类型。 原代码 string returnedString Marshal.PtrToStringAuto(pReturnedString, (int)bytesReturned); 处理后的代码 string returnedString Marshal.PtrToStringAuto(pReturnedString, (int)bytesR…...
Python库学习(十二):数据分析Pandas[下篇]
接着上篇《Python库学习(十一):数据分析Pandas[上篇]》,继续学习Pandas 1.数据过滤 在数据处理中,我们经常会对数据进行过滤,为此Pandas中提供mask()和where()两个函数; mask(): 在 满足条件的情况下替换数据,而不满足条件的部分…...

工具: MarkDown学习
具体内容看官方教程: Markdown官方教程...
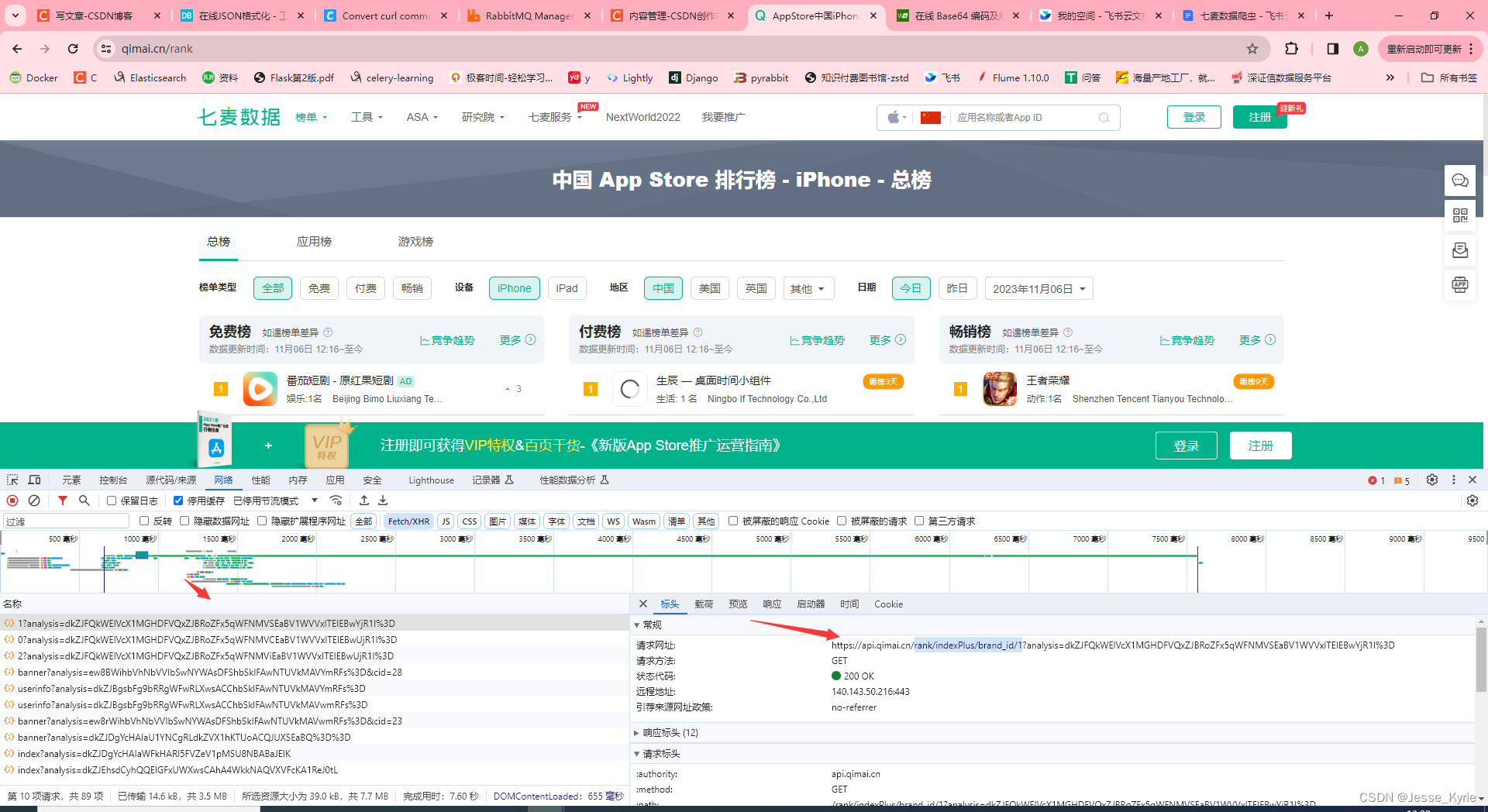
JS逆向爬虫---请求参数加密②【某麦数据analysis参数加密】
主页链接: https://www.qimai.cn/rank analysis逆向 完整参数生成代码如下: const {JSDOM} require(jsdom) const dom new JSDOM(<!DOCTYPE html><p>hello</p>) window dom.windowfunction customDecrypt(n, t) {t t || generateKey(); //…...
基于APM(PIX)飞控和missionplanner制作遥控无人车-从零搭建自主pix无人车无人坦克
前面的步骤和无人机调试一样,可以参考无人机相关专栏。这里不再赘述。 1.安装完rover的固件后,链接gps并进行校准。旋转小车不同方向,完成校准,弹出成功窗口。 2.校准遥控器。 一定要确保遥控器模式准确,尤其是使用没…...
学习笔记)
Vue3的手脚架使用和组件父子间通信-插槽(Options API)学习笔记
Vue CLI安装和使用 全局安装最新vue3 npm install vue/cli -g升级Vue CLI: 如果是比较旧的版本,可以通过下面命令来升级 npm update vue/cli -g通过脚手架创建项目 vue create 01_product_demoVue3父子组件的通信 父传子 父组件 <template>…...

第九章软件管理
云计算第九章软件管理 概述 1RPM包 RPM Package Manager 由Red Hat公司提出被众多Linux发现版所采用 也称二进制无需编译可以直接使用 无法设定个人设置开关功能 软件包示例 认识ROM包 2源码包 source code 需要经过GCC,C编辑环境编译才能运行 可以设定个人设置&…...
Web渗透编程语言基础
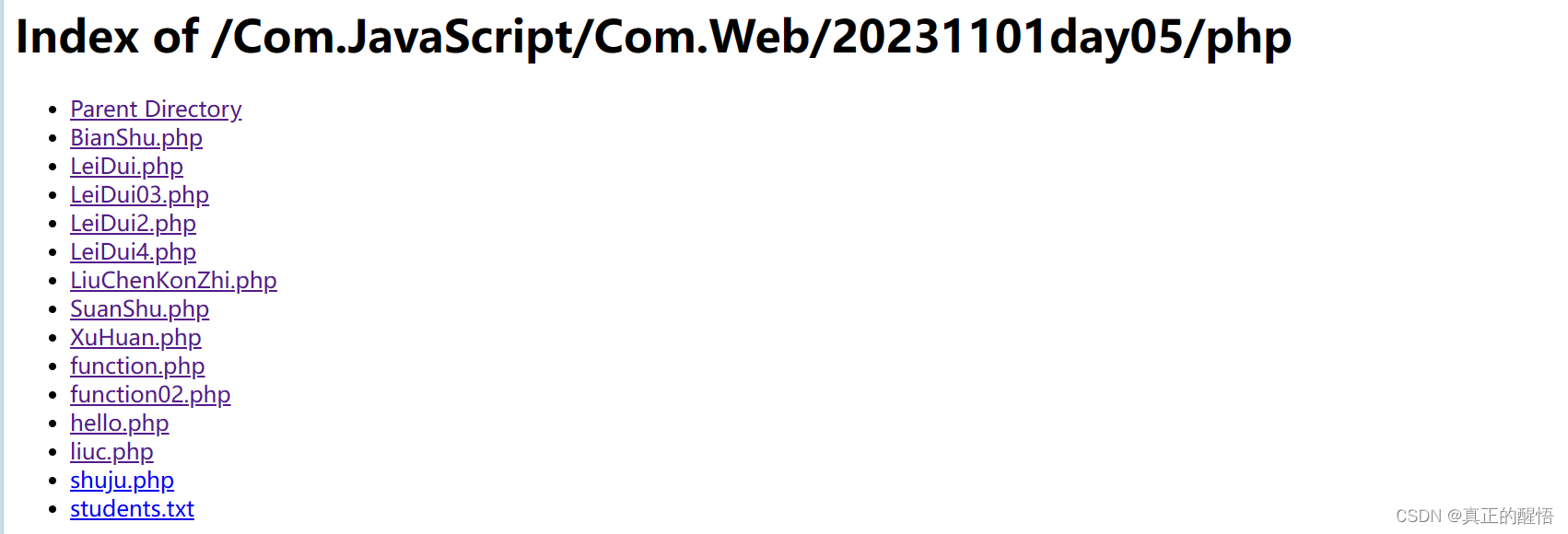
Web渗透初学者JavaScript专栏汇总-CSDN博客 Web渗透Java初学者文章汇总-CSDN博客 一 Web渗透PHP语言基础 PHP 教程 | 菜鸟教程 (runoob.com) 一 PHP 语言的介绍 PHP是一种开源的服务器端脚本语言,它被广泛用于Web开发领域。PHP可以与HTML结合使用,创建动态网页。 PHP的特…...
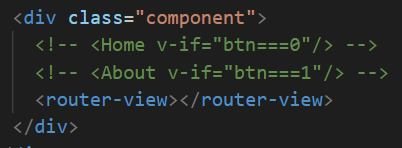
Vue-router 路由的基本使用
Vue-router是一个Vue的插件库,专门用于实现SPA应用,也就是整个应用是一个完整的页面,点击页面上的导航不会跳转和刷新页面。 一、安装Vue-router npm i vue-router // Vue3安装4版本 npm i vue-router3 // Vue2安装3版本 二、引入…...

如何在CPU上进行高效大语言模型推理
大语言模型(LLMs)已经在广泛的任务中展示出了令人瞩目的表现和巨大的发展潜力。然而,由于这些模型的参数量异常庞大,使得它们的部署变得相当具有挑战性,这不仅需要有足够大的内存空间,还需要有高速的内存传…...
简简单单入门Makefile
笔记来源:于仕琪教授:Makefile 20分钟入门,简简单单,展示如何使用Makefile管理和编译C代码 操作环境 MacosVscode 前提准备 新建文件夹 mkdir learn_makefile新建三个cpp文件和一个头文件 // mian.cpp #include <iostrea…...
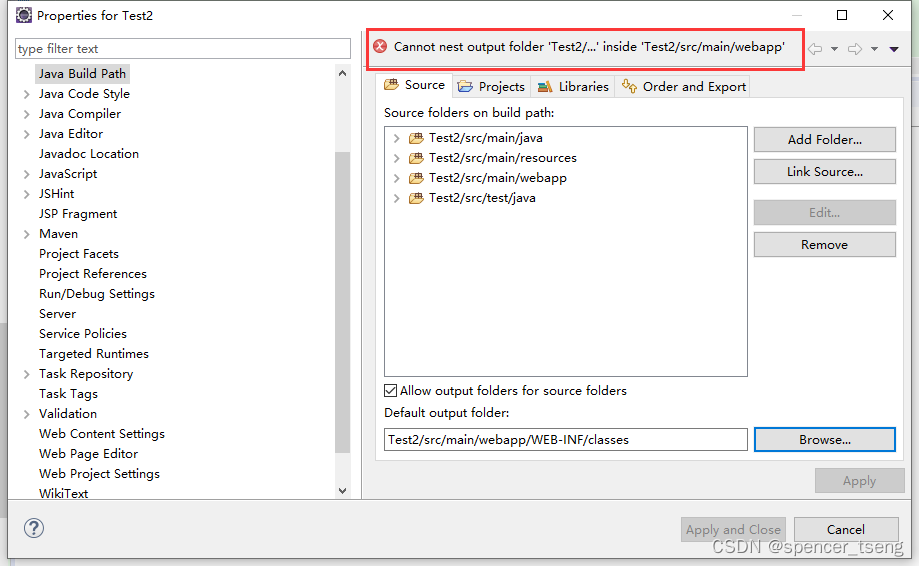
New Maven Project
下面两个目录丢失了: src/main/java(missing) src/test/java(missing) 换个JRE就可以跑出来了 变更目录...
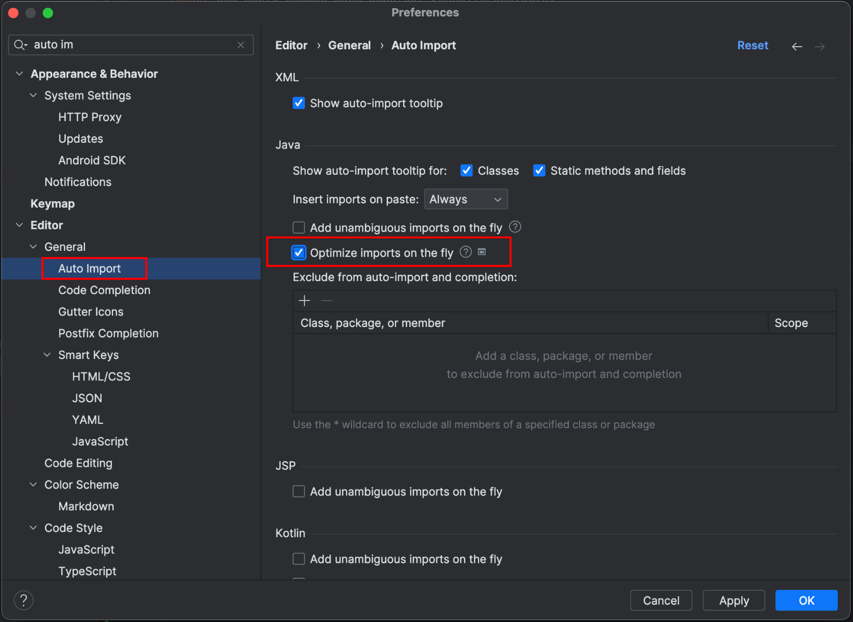
IDEA中如何移除未使用的import
👨🏻💻 热爱摄影的程序员 👨🏻🎨 喜欢编码的设计师 🧕🏻 擅长设计的剪辑师 🧑🏻🏫 一位高冷无情的编码爱好者 大家好,我是全栈工…...
)
第18章_MySQL8新特性之CTE(公用表表达式)
文章目录 新特性:公用表表达式(cte)普通公用表表达式递归公用表表达式小 结 新特性:公用表表达式(cte) 公用表表达式(或通用表表达式)简称为CTE(Common Table Expressions)。CTE是一个命名的临时结果集&am…...
)
保姆级教程:在CentOS 7上用达梦8搭建DCA练习环境(附ulimit、VNC、ODBC全配置)
达梦8 DCA认证实战:CentOS 7环境搭建与调优全指南 在国产数据库技术快速发展的今天,达梦数据库作为核心产品之一,其DCA认证已成为众多从业者提升竞争力的重要选择。与理论为主的认证不同,DCA更注重实际操作能力,而一个…...

基于2D工程图几何特征与梯度提升模型的制造成本智能预测
1. 项目概述:从图纸到报价的智能革命在制造业,尤其是像汽车零部件这样的离散制造领域,报价速度直接决定了订单的生死。传统上,拿到一张新的2D工程图(DWG格式),成本工程师需要花上几天甚至几周时…...

MCP Server生产级配置:Playwright与LLM集成的避坑指南
1. 这不是又一个“Playwright入门教程”,而是一份能直接塞进CI流水线的MCP Server生产级配置实录你有没有遇到过这样的场景:团队刚决定用AI驱动自动化测试,技术选型会上大家一致看好Playwright MCP(Model Context Protocol&#…...

高性能Windows流媒体服务器部署:5大核心技术与3种实战架构深度解析
高性能Windows流媒体服务器部署:5大核心技术与3种实战架构深度解析 【免费下载链接】srs-windows 项目地址: https://gitcode.com/gh_mirrors/sr/srs-windows 在Windows平台上构建专业级流媒体服务系统,需要综合考虑协议兼容性、性能优化和部署架…...

为什么视频代剪辑会影响你的内容传播效果
为什么你精心拍的视频,发出去却没人看? 你有没有过这样的经历:花了一整天拍Vlog,素材画质高清、内容真实,可一剪出来就显得平淡无奇,点赞寥寥?或者婚礼当天感动全场,回看成片却像流水…...

BurpSuite 2025插件开发JDK版本兼容性实战指南
1. 为什么BurpSuite插件开发环境总在JDK版本上翻车?你是不是也经历过:下载好BurpSuite最新版2025.4,兴冲冲打开插件开发文档,照着官方示例写完第一个HelloWorld插件,一编译——java.lang.UnsupportedClassVersionError…...

终极艾尔登法环帧率解锁指南:轻松突破60FPS限制
终极艾尔登法环帧率解锁指南:轻松突破60FPS限制 【免费下载链接】EldenRingFpsUnlockAndMore A small utility to remove frame rate limit, change FOV, add widescreen support and more for Elden Ring 项目地址: https://gitcode.com/gh_mirrors/el/EldenRing…...

《我看见的世界:李飞飞自传》第1-6章阅读笔记:从移民少女到AI教母的“看见“之旅
前言 当我们谈论人工智能时,我们谈论的是算法、数据、算力,是那些冰冷的代码和复杂的模型。但在《我看见的世界:李飞飞自传》中,李飞飞用她独特的视角告诉我们:AI的本质,是人类对"看见"世界的渴望…...

从RD、CS到WK:一文讲透SAR主流成像算法的演进与选型实战
从RD、CS到WK:SAR成像算法选型实战指南 当无人机掠过灾区上空,或卫星扫描地球表面时,合成孔径雷达(SAR)正通过电磁波穿透云层和黑暗,将地面信息转化为高分辨率图像。而决定图像质量的关键,在于工…...

AI率总超标?2026年AI写作辅助网站排行榜权威发布,轻松定稿不是梦!
写论文效率低、熬夜赶稿、查重不过关?别慌!2026 年最新 AI 论文写作工具合集来了,覆盖选题、大纲、初稿、润色、降重、格式、文献引用全流程,帮你精准匹配最适合的学术助手,彻底告别论文内耗!🏆…...