计算机视觉
目录
一、图像处理
main
denoise
二、Harris角点检测
三、Hough变换直线检测
四、直方图显著性检测
五、人脸识别
六、kmeans
import
函数
kmeanstext
七、神经网络
常用函数:
imread----------读取图像
imshow---------显示图像
rgb2hsv---------RGB转HSV
hsv2rgb---------HSV转RGB
imhist-----------显示图像直方图
rgb2gray-------彩色图转灰度图
imnoise--------对图像添加噪声
fspecial--------构建均值滤波模板
imfilter--------均值滤波函数
imgaussfilt-----高斯滤波函数
一、图像处理
main
clc
clear all
img = double(imread('Fig1.bmp'));
R = img(:,:,1);
G = img(:,:,2);
B = img(:,:,3);
figure(1);
subplot(2,2,1), imshow(uint8(img)),title('原图');
subplot(2,2,2), imshow(uint8(R));title('R分量图');
subplot(2,2,3), imshow(uint8(G));title('B分量图');
subplot(2,2,4), imshow(uint8(B));title('B分量图');
%rgb2hsv
img_hsv = rgb2hsv(img);
img_hsv(:,:,1) = img_hsv(:,:,1)*3;
img_hsv(:,:,2) = img_hsv(:,:,2);
img_hsv(:,:,3) = img_hsv(:,:,3);
img_rgbh = hsv2rgb(img_hsv);
img_hsv = rgb2hsv(img);
img_hsv(:,:,1) = img_hsv(:,:,1);
img_hsv(:,:,2) = img_hsv(:,:,2)*3;
img_hsv(:,:,3) = img_hsv(:,:,3);
img_rgbs = hsv2rgb(img_hsv);
img_hsv = rgb2hsv(img);
img_hsv(:,:,1) = img_hsv(:,:,1);
img_hsv(:,:,2) = img_hsv(:,:,2);
img_hsv(:,:,3) = img_hsv(:,:,3)*3;
img_rgbv = hsv2rgb(img_hsv);
figure(2);
subplot(2,2,1), imshow(uint8(img)),title('原图');
subplot(2,2,2), imshow(uint8(img_rgbh));title('H增强分量图');
subplot(2,2,3), imshow(uint8(img_rgbs));title('S增强分量图');
subplot(2,2,4), imshow(uint8(img_rgbv));title('V增强分量图');
%直方图
figure(3);
subplot(2,2,1), imshow(uint8(img)),title('原图');
subplot(2,2,2), imhist(uint8(img(:,:,1)));title('R分量直方图');
subplot(2,2,3), imhist(uint8(img(:,:,2)));title('B分量直方图');
subplot(2,2,4), imhist(uint8(img(:,:,3)));title('B分量直方图');
denoise
clc
clear all
img = imread('Fig6.bmp');
figure(1)
subplot(1,1,1),imshow(uint8(img)),title('原图');
img = rgb2gray(img);
%添加噪声
im_noise_g = imnoise(img, 'gaussian',0,0.01);
im_noise_s = imnoise(img, 'salt & pepper',0.03);
figure(2)
subplot(1,2,1),imshow(uint8(im_noise_g)),title('高斯噪声图');
subplot(1,2,2),imshow(uint8(im_noise_s)),title('椒盐噪声图');
%均值滤波
A_3 = fspecial('average',[3,3]);
A_9 = fspecial('average',[9,9]);
im_denoise_g_3 = imfilter(im_noise_g,A_3);
im_denoise_g_9 = imfilter(im_noise_g,A_9);
figure(3)
subplot(1,2,1),imshow(uint8(im_denoise_g_3)),title('高斯去噪图-均值—3*3');
subplot(1,2,2),imshow(uint8(im_denoise_g_9)),title('高斯去噪图-均值—9*9');
%高斯滤波
im_denoise_g_1 = imgaussfilt(im_noise_g,1);
im_denoise_g_5 = imgaussfilt(im_noise_g,5);
figure(4)
subplot(1,2,1),imshow(uint8(im_denoise_g_1)),title('高斯去噪图-高斯-1');
subplot(1,2,2),imshow(uint8(im_denoise_g_5)),title('高斯去噪图-高斯-5');
二、Harris角点检测
clear;
% 读取图像
grayImage = imread('1.bmp');
% 转化为灰度图像
%grayImage=rgb2gray(srcImage);
% 求取图像宽高
[ImageHeight,ImageWidth]=size(grayImage);
% 显示原始灰度图
% imshow(ori_im);
% 方法1:x方向梯度算子(用于Harris角点提取算法)
% fx = [-2 -1 0 1 2];
% 方法2:x方向高斯卷积核(高斯尺度空间的多尺度优化)
%fx = [5 0 -5;8 0 -8;5 0 -5];
fx = [1,2,1;0,0,0;-1,-2,-1];
% x方向滤波微分
Ix = filter2(fx,grayImage);
% 显示x方向滤波图
figure;imshow(Ix);
% 方法1:y方向梯度算子(用于Harris角点提取算法)
% fy = [-2;-1;0;1;2];
% 方法2:y方向高斯卷积核(高斯尺度空间的多尺度优化)
%fy = [5 8 5;0 0 0;-5 -8 -5];
fy = [1,0,-1;2,0,-2;1,0,-1];
% y方向滤波微分
Iy = filter2(fy,grayImage);
% 显示y方向滤波图
figure;imshow(Iy);
%(相关参数说明见harris理论,文中前面有链接)
Ix2 = Ix.^2;
Iy2 = Iy.^2;
Ixy = Ix.*Iy;
% 产生7*7的高斯窗函数,sigma=2,用于窗口的高斯平滑
w= fspecial('gaussian',[5 5],2);
Ix2 = filter2(w,Ix2);
Iy2 = filter2(w,Iy2);
Ixy = filter2(w,Ixy);
% 纪录角点位置,角点处值为1
corner = zeros(ImageHeight,ImageWidth);
% 图像中最大的响应值
Rmax = 0;
% 计算各点的响应值
R = zeros(ImageHeight,ImageWidth);
for i = 1:ImageHeight
for j = 1:ImageWidth
M = [Ix2(i,j) Ixy(i,j);Ixy(i,j) Iy2(i,j)];
R(i,j) = det(M)-0.06*(trace(M))^2;
% if R(i,j) > Rmax
% Rmax = R(i,j);
% end;
end;
end;
% 角点个数
cnt = 0;
% 进行非极大抑制,窗口大小3*3
for i = 2:ImageHeight-1
for j = 2:ImageWidth-1
%if ( R(i,j) > 0.01*Rmax && R(i,j) > R(i-1,j-1) && R(i,j) > R(i-1,j) && R(i,j) > R(i-1,j+1) && R(i,j) > R(i,j-1) && R(i,j) > R(i,j+1) && R(i,j) > R(i+1,j-1) && R(i,j) > R(i+1,j) && R(i,j) > R(i+1,j+1))
if ( R(i,j) > 20 && R(i,j) > R(i-1,j-1) && R(i,j) > R(i-1,j) && R(i,j) > R(i-1,j+1) && R(i,j) > R(i,j-1) && R(i,j) > R(i,j+1) && R(i,j) > R(i+1,j-1) && R(i,j) > R(i+1,j) && R(i,j) > R(i+1,j+1))
corner(i,j) = 1;
cnt = cnt+1;
end;
end;
end;
[upix, vpix] = find(corner == 1);
%角点个数
cnt
%绘制角点
figure;
imshow(grayImage)
hold on;
plot(vpix,upix,'r.');
三、Hough变换直线检测
clear;
% 读取图像
I = imread('1.bmp');
subplot(2,2,1);
imshow(I);
title('原图');
BW = edge(I,'canny');
subplot(2,2,2);
imshow(BW);
title('canny算子边缘检测后图像');
%=====hough函数===============
%BW:m*n维二值图
% RhoResolution:ρ的分辨率,缺省为1
% ThetaResolution:θ的分辨率,θ的范围是[-90,90)
% H:hough变换后的累加器矩阵,行数为m,列数为n
% theta:θ
% rho:ρ theta,rho为计算霍夫变换的角度和半径值
[H,T,R] = hough(BW);
subplot(2,2,3);
imshow(H,[],'XData',T,'YData',R,'InitialMagnification','fit');
% imshow(H,[]);
title('Hough变换图');
axis on
axis normal
xlabel('\theta')
ylabel('\rho')
hold on
%找到Hough变换结果,累加容器H中所有大于阈值Threshold的峰值中,最大的2个峰值所在的位置P。
% P为矩阵,记录H中被找到的峰值的横纵坐标。
%再hough矩阵中寻找前40个大于hough矩阵中最大值0.24倍峰值
% P = houghpeaks(H,10,'threshold',ceil(0.3*max(H(:)))); %P是峰值的坐标
P = houghpeaks(H,10); %P是峰值的坐标
x = T(P(:,2));
y = R(P(:,1)); %由行列索引转换成实际坐标
plot(x,y,'s','color','white'); %再hough矩阵图像中标出峰值位置
%二值图BW中对应指定(theta,rho),且容器中数值>峰值P的所有线段lines
% 且线段最小长度大于MinLength
% 线段间距离<FillGap的合并
% lines为结构变量,(lines.point1,lines.point2)记录满足条件的线段端点
lines = houghlines(BW,T,R,P,'FillGap',5,'MinLength',7); %合并距离小于5的线段,丢弃所有长度小于7的线段
subplot(2,2,4);
imshow(I);
title('hough变换检测图');
axis on;
hold on;
% mex_len = 0;
for k=1:length(lines) %以此标注各条直线
xy = [lines(k).point1;lines(k).point2];
plot(xy(:,1),xy(:,2),'LineWidth',2,'Color','red');
hold on
% %确定最长线段的端点
% len = norm(lines(k).point1 - lines(k).point2); %最长线段的长度
% if(len > max_len)
% mex_len = len;
% xy_long = xy;
% end
end
% plot(xy_long(:,1),xy_long(:,2),'LineWidth',2,'Color','cyan');
四、直方图显著性检测
%读取图像
%orpic = imread(img_name);
clear all;
clc;
close all;
orpic = imread('test2.bmp');
figure;imshow(orpic);
%获取图像的长、宽和通道值
[row ,column, nn] = size(orpic);
%生成调色板pallet(color,number),默认调色板大小为图像大小
pallet = zeros(row*column,2);
%设置阶梯值,为了将rgb量化后的结果化成一个12进制的数
w = [12*12,12,1];%RGB通道各自的权重,这里的权重不能设置为一样的,这是为了保证不一样的rgb组合得到的值不同
idx = uint32(1);%调色板像数值个数
SUM = uint32(0);%量化和
RGBSUM = zeros(row,column);%原图像为三维彩图,将RGB通道加权后每个像素的值
for i = 1 : row
for j = 1 : column
%获取第i行第j列的R、G、B通道的值,并量化为12阶后再转化为一个数
a1 = floor((double(orpic(i,j,1))/255)*(12-0.0001))*w(3); %乘以权重不一样就是为了每个通道量化后乘以权重的值不重叠了
a2 = floor((double(orpic(i,j,2))/255)*(12-0.0001))*w(2);
a3 = floor((double(orpic(i,j,3))/255)*(12-0.0001))*w(1);
SUM = int32(a1) + int32(a2) + int32(a3); %三个通道量化后颜色和作为计算相似性的依据
% SUM = 3* int32(a1);
RGBSUM(i,j) = SUM;
%对于每个像数值,将其归类到调色板中,先在已经归类的pallet中查找,如果遍历完毕发现未归类,则将索引+1并归类
%找出处理后的数据有多少种颜色值,以及其频数
%记录不同颜色出现的次数和出现的频率 pallet第一列是颜色 第二列是该颜色出现的次数
if idx == 1 %第一次循环 也就是该颜色第一次出现
pallet(idx,1) = SUM;
pallet(idx,2) = pallet(idx,2) + 1;
idx = idx + 1; %颜色值+1
continue;
end
flag = 0;
for m = 1 : idx-1 %检查有没有重复的颜色 如果没有 flag=0 里面已经有重复的颜色了,那flag=1,对应的频率值+1
if pallet(m,1) == SUM
pallet(m,2) = pallet(m,2) + 1;
flag = 1;
break;
end
end
if flag == 0
pallet(idx,1) = SUM;
pallet(idx,2) = pallet(idx,2) + 1;
idx = idx + 1;
end
end
end
%获取图中所有的颜色值
idx = idx -1;
pallet = pallet(1:idx,:);%调色板截断,保留真实调色个数
%生成新的调色板num(number,color),使得颜色按照频数从大到小排列,且一号位为频数大小,二号位为处理后的颜色值
palletemp = pallet(:,2); %把频数取出来
[b,pos] = sort(palletemp,'descend'); %频数降序排列
num = zeros(idx,2);
for i = 1 : idx
num(i,1) = b(i); %pos是降序的位置 b是对应的频数
num(i,2) = pallet(pos(i),1); %pos位置对应的颜色值
%num第一列 频数 第二列 颜色值
end
%计算如果要保留95%的处理后的颜色值,需要保留调色板的多少位
maxnum = idx; %本来是257个颜色值
maxdropnum = floor(row*column*(1-0.95)); %算出覆盖面积 5% 对应多少个像素maxdropnum
crnt = num(maxnum,1); %颜色频数 (从大到小排序)这是最后一个的频数
while(crnt<maxdropnum && maxnum>1) %覆盖面积小并且不是第一个
crnt = crnt + num(maxnum-1,1); %crnt 累加倒数第二个颜色频率(颜色频率,也就是这个颜色有多少个像素)
maxnum = maxnum - 1;
end %直到颜色对应的个数大于5%的像素个数了 结束
%保证保留的颜色值个数小于256且尽量不太小
maxnum = min(maxnum,256);
if maxnum < 10
maxnum = min(idx,100);
end
%将处理后的颜色值转化回RGB对应的值,此处会有+-1的误差,影响不大
color3i = zeros(idx,3);
for i = 1:idx %是吧257个颜色返回
color3i(i,1) = round(num(i,2)/w(1));
color3i(i,2) = round(mod(num(i,2),w(1))/w(2));
color3i(i,3) = round(mod(num(i,2),w(2)));
end
%建立色板pallet(number,color,pos),其中pos为保留颜色的序号
a = zeros(idx,1);
pallet = [num,a]; %num第一列 频数 第二列 颜色值 第三列 序号
for i = 1:maxnum
pallet(i,3) = i;
end
%将舍弃的颜色归到其最相近的颜色当中
for i = (maxnum+1):idx %idx 257 原来的颜色个数 maxnum去掉95%以后的颜色个数 要把后面这么多颜色归到周围的颜色中去
simidx = 99999999;simval = 99999999;
for j = 1:maxnum %看看后面去掉的颜色和前面哪些颜色接近 计算距离
d_ij = round((color3i(i,1)-color3i(j,1))^2 + (color3i(i,2)-color3i(j,2))^2 + (color3i(i,3)-color3i(j,3))^2);
if d_ij < simval
simval = d_ij;
simidx = j;
end
end %把最小距离的颜色记录下来,那么就把i这个颜色归类到距离最小颜色
pallet(simidx,1) = pallet(simidx,1) + pallet(i,1); %对应的颜色频数+1
pallet(i,3) = simidx; %保留序号 就是标记 原来的这个颜色归去第4行了 simidx = 4
end
%将图像中属于某一“颜色值”的所有颜色的rgb值累加之后求平均再归一,即调整保留下来颜色值
rgbcolor = zeros(idx,4);
for n =1:idx
for i = 1:row
for j = 1:column
if RGBSUM(i,j) == pallet(n,2) %num第一列 频数 第二列 颜色值 第三列 序号
rgbcolor(n,1) = int32(rgbcolor(n,1)) + int32(orpic(i,j,1));
rgbcolor(n,2) = int32(rgbcolor(n,2)) + int32(orpic(i,j,2));
rgbcolor(n,3) = int32(rgbcolor(n,3)) + int32(orpic(i,j,3));
rgbcolor(n,4) = double(pallet(n,3));
end
end
end
end
for i = 1:maxnum %maxnum 去掉了5%的颜色个数
for j = (maxnum+1):idx
if rgbcolor(j,4) == i
rgbcolor(i,1) = (rgbcolor(i,1) + rgbcolor(j,1));
rgbcolor(i,2) = (rgbcolor(i,2) + rgbcolor(j,2));
rgbcolor(i,3) = (rgbcolor(i,3) + rgbcolor(j,3));
end
end
rgbcolor(i,1) = (rgbcolor(i,1)/pallet(i,1))/255;
rgbcolor(i,2) = (rgbcolor(i,2)/pallet(i,1))/255;
rgbcolor(i,3) = (rgbcolor(i,3)/pallet(i,1))/255;
end
%将颜色格式由RGB转为Lab
labcolor = zeros(maxnum,3);
for i = 1:maxnum
a = zeros(1,1,3);
a(1,1,1) = rgbcolor(i,1);
a(1,1,2) = rgbcolor(i,2);
a(1,1,3) = rgbcolor(i,3);
b = rgb2lab(a);
labcolor(i,1) = b(1,1,1);
labcolor(i,2) = b(1,1,2);
labcolor(i,3) = b(1,1,3);
end
%存放颜色i与颜色j在Lab空间上的距离
distemp = zeros(maxnum,maxnum,2);
%每行将颜色j与颜色i的在Lab空间上的距离按从小到大排列
dist = zeros(maxnum,maxnum,2);
%存放平滑前的颜色显著值
colorsaltemp = zeros(maxnum,2);
for i = 1:maxnum
for j = 1:maxnum
%计算颜色i与其他所有j个颜色在Lab空间上的距离 存下来
distemp(i,j,1) = norm(labcolor(i,:)-labcolor(j,:),2);
distemp(i,j,2) = j;
end
for k = 1:maxnum
if k == i
continue;
end
%颜色i在平滑之前的颜色显著值,为S(c)=ΣP(c)D(c,a),a为其他的颜色 概率相加的显著性值
colorsaltemp(i,1) = colorsaltemp(i,1) + (pallet(k,1)/(row*column))*distemp(i,k,1); %num第一列 频数 第二列 颜色值 第三列 序号
colorsaltemp(i,2) = i;
end
% [b,pos] = sort(distemp(i,:,1),'ascend');
% for k = 1:maxnum
% dist(i,k,1) = b(k);
% dist(i,k,2) = distemp(i,pos(k),2); % dist里面是按照距离排序存放的 b是距离值 pos是位置
% end
end
% % %对各颜色进行平滑操作
% colorsal = zeros(maxnum,2);
% %计算权值时使用的颜色i与和其最邻近颜色的个数
% n = double(round(maxnum/4));
% %保存与颜色i在Lab空间上最相近的n=maxnum/4个点的距离的和
% totaldist = zeros(maxnum,1);
% for i = 1:maxnum
% %计算与颜色i在Lab空间上最相近的n=maxnum/4个点的距离的和
% for j = 2:n
% totaldist(i,1) = totaldist(i,1) + dist(i,j,1);
% end
% valcrnt = 0;
% for j = 1:n
% valcrnt = valcrnt + colorsaltemp(dist(i,j,2),1)*(totaldist(i,1)-dist(i,j,1)); %距离差乘以距离值 作为周围四个颜色值的权重
% end
% colorsal(i,1) = valcrnt/((n-1)*totaldist(i,1));
% colorsal(i,2) = i;
% end
%保存原图像各像素的显著值
sal = zeros(row,column);
for i = 1:row
for j = 1:column
for n = 1:idx
if RGBSUM(i,j) == pallet(n,2)
%sal(i,j) = colorsal(pallet(n,3),1);
sal(i,j) = colorsaltemp(pallet(n,3),1);
end
end
end
end
saliency = (sal - min(min(sal)))/(max(max(sal)) - min(min(sal)));
A=fspecial('gaussian',[3,3],2);
saliency=imfilter(saliency,A,'replicate');
%显示显著性图
subplot(1,2,1),imshow(saliency);
subplot(1,2,2),imshow(sal,[]);
%读取图像并显示原图像
将图像的RGB值量化为12阶,生成调色板(pallet)
将调色板中的颜色按照频数从大到小排列,舍弃一部分颜色
将舍弃的颜色归到最相近的颜色中,更新调色板
计算保留下来的每种颜色的平均RGB值,并转换为Lab颜色空间
计算每种颜色之间在Lab空间上的距离,得到颜色的显著性数值
将显著性数值归一化,并进行高斯平滑
显示图像的显著性结果
五、人脸识别
clear all
clc
faceDatabase= imageSet('dataSet','recursive');
%% Face detector
Fdetect= vision.CascadeObjectDetector();
[training, test]=partition(faceDatabase,[0.5,0.5]);
featureCount=1;
for i=1:size(training,2)
for j= 1:training(i).Count
Image= read(training(i),j);
BB= step(Fdetect,Image);
if(size(BB,1)==0)
disp('problem here')
face=Image;
else
figure(1);
imshow(Image);
hold on
for ii=1:size(BB,1)
rectangle('Position',BB(ii,:),'LineWidth',5,'LineStyle','--','EdgeColor','r');
end
[m, p]= max(BB(:,3));
try
face=imcrop(Image,BB(p,:));
catch ME
disp('found one');
end
end
face= imresize(face,[224,224]);
X(featureCount,:)= extractHOGFeatures(face);
y{featureCount}= training(i).Description;
featureCount= featureCount+1;
end
end
disp('training Set image collected')
faceClassifier= fitcecoc(X,y);
pred= predict(faceClassifier, X);
pd=zeros(size(X,1),1);
for i=1:size(X,1)
if(strcmp(pred{i},y{i}))
pd(i)=1;
end
end
fprintf('\nTraining Set Accuracy: %f\n', mean(pd) * 100);
featureCount=1;
for i=1:size(test,2)
for j=1:test(i).Count
Image= read(test(i),j);
BB= step(Fdetect,Image);
if(size(BB,1)==0)
disp('problem here')
face=Image;
else
figure(1);
imshow(Image);
hold on
for ii=1:size(BB,1)
rectangle('Position',BB(ii,:),'LineWidth',5,'LineStyle','--','EdgeColor','r');
end
[m, p]= max(BB(:,3));
try
face=imcrop(Image,BB(p,:));
catch ME
disp('found one');
end
end
face= imresize(face,[224,224]);
Xtest(featureCount,:)= extractHOGFeatures(face);
ytest{featureCount}= test(i).Description;
featureCount= featureCount+1;
end
end
disp('test Set image collected')
testPred= predict(faceClassifier, Xtest);
pdt=zeros(size(Xtest,1),1);
for i=1:size(Xtest,1)
if(strcmp(testPred{i},ytest{i})==1)
pdt(i)=1;
end
end
fprintf('\nTest Set Accuracy: %f\n', mean(pdt) * 100);
六、kmeans
import
close all; %matlab代码
clear all;
clc
k=2;
org = imread('1.jpeg'); %读入图像
figure;
subplot(2,2,1);
imshow(org),title('原始图像'); %显示原图像
% 接下来需要知道图片的尺寸(长和宽),如若直接对RGB图像进行操作,如下
%转化为灰度图
gray=rgb2gray(org);
[m,n]=size(gray); %m,n为所求,p=3为通道数
% 将图像进行RGB——3通道分解 % org(:, :, 1)......分别代表rgb通道
A = reshape(org(:, :, 1), m*n, 1);
B = reshape(org(:, :, 2), m*n, 1);
C = reshape(org(:, :, 3), m*n, 1);
data = [A B C]; % r g b分量组成样本的特征,每个样本有三个属性值,共width*height个样本
% 第二张图
% kmeans第一个参数: N*P的数据矩阵,N为数据个数,P为单个数据维度
res = kmeans(double(data), k);
result = reshape(res, m, n); % 反向转化为图片形式
subplot(2,2,2);
% label2rgb功能是转换标记矩阵到RGB图像
imshow(label2rgb(result)),title(strcat('K=',num2str(k),'时RGB通道分割结果')); %显示分割结果
% 第三张图
res = kmeans(double(data), k+1);
result = reshape(res, m, n);
subplot(2,2,3);
imshow(label2rgb(result)),title(strcat('K=',num2str(k+1),'时RGB通道分割结果'));
% 第四张图
res = kmeans(double(data), k+2);
result = reshape(res, m, n);
subplot(2,2,4);
imshow(label2rgb(result)),title(strcat('K=',num2str(k+2),'时RGB通道分割结果'));
函数
function [C, label, J] = kmeans(I, k)
%C聚类中心
[m, n, p] = size(I);%图片的大小m*n,p代表RGB三层
X = reshape(double(I), m*n, p);%将I的行列排列成m*n行p列,按照列取数据的
rng('default');%将随机数生成器的设置重置为其默认值,因此会生成相同的随机数
C = X(randperm(m*n, k), :);%随机选三个聚类中心;randperm(m*n, k)-在m*n个数中,随机选择k个;X(randperm(m*n, k), :)-选取X中第k行的数据
J_prev = inf;%inf为无穷大
iter = 0;
J = [];
tol = 1e-11;%容忍度10^(-11)
while true
iter = iter + 1;
dist = sum(X.^2, 2)*ones(1, k) + (sum(C.^2, 2)*ones(1, m*n))' - 2*X*C';%计算图片中各个点到K个聚类中心的距离;sum(X, 2)-以行为单位求和;C'-转置;dist-mn行k列
[~,label] = min(dist, [], 2);%label记录最小值的列数,找到dist中那些最小值的索引位置,并放在向量label中返回。C = min(A,[],dim)-返回A中由dim指定的维数范围中的最小值,dim取2时,该函数返回一个列向量,其第i个元素是A矩阵的第i行上的最小值。label的取值在1-k之间
for i = 1:k
C(i, :) = mean(X(label == i , :)); %取新的k个聚类中心;label=1(2、3)的所有行,求每列的均值;
end
J_cur = sum(sum((X - C(label, :)).^2, 2));%距离之和;X - C(label, :)-对应行相减
J = [J, J_cur];
display(sprintf('#迭代次数: %03d, 目标函数: %f', iter, J_cur));%sprintf-将数据格式化为字符串或字符向量;%03d-左边补0 的等宽格式,比如数字12,%03d出来就是:012;sprintf() = display(sprintf());
if norm(J_cur-J_prev, 'fro') < tol%n=norm(A,p)-A和A'的积的对角线和的平方根,即sqrt(sum(diag(A'*A))),本次与上次距离之差
break
end
if (iter==10),% A和A'的积的对角线和的平方根,即sqrt(sum(diag(A'*A))),本次与上次距离之差
break
end
J_prev = J_cur;
end
kmeanstext
I = imread('../1.jpeg');
[m, n, p] = size(I);
figure
subplot(1,2,1);imshow(I);title('原始图像');%显示图片I
k = 2;%聚类数量
[C, label2, J2] = kmeans(I, k);
I_seg2 = reshape(C(label2, :), m, n, p);%转换成图片矩阵的格式
k = 4;
[C, label3, J3] = kmeans(I, k);
I_seg3 = reshape(C(label3, :), m, n, p);
k = 8;
[C, label4, J4] = kmeans(I, k);
I_seg4 = reshape(C(label4, :), m, n, p);
k = 16;
[C, label5, J5] = kmeans(I, k);
I_seg5 = reshape(C(label5, :), m, n, p);
figure
subplot(2, 4, 1); imshow(uint8(I_seg2), []); title('2-聚类');%imshow(I,[min(I(:)) max(I(:))]);uint8的范围是0-255。
subplot(2, 4, 2); imshow(uint8(I_seg3), []); title('4-聚类');
subplot(2, 4, 3); imshow(uint8(I_seg4), []); title('8-聚类');
subplot(2, 4, 4); imshow(uint8(I_seg5), []); title('16-聚类');
七、神经网络
import torch
import numpy as np
from torch import nn, optim
from torch.autograd import Variable
from torch.utils.data import DataLoader
from torchvision import datasets, transforms
import matplotlib.pyplot as plt
class CNN(nn.Module):
def __init__(self):
super(CNN, self).__init__()
self.layer1 = nn.Sequential(nn.Conv2d(1, 10, kernel_size=5), nn.BatchNorm2d(10),
nn.ReLU(), nn.MaxPool2d(kernel_size=2))
self.layer2 = nn.Sequential(nn.Conv2d(10, 20, kernel_size=5),nn.BatchNorm2d(20),
nn.ReLU(), nn.MaxPool2d(kernel_size=2))
self.fc = nn.Sequential( nn.Linear(320, 50), nn.ReLU(),nn.Linear(50, 10))
def forward(self, x):
x = self.layer1(x)
x = self.layer2(x)
x = x.view(x.size(0), -1)
x = self.fc(x)
return x
class BP(nn.Module):
def __init__(self):
super(BP, self).__init__()
self.fc = nn.Sequential(nn.Linear(784, 128),nn.ReLU(inplace=True), nn.Linear(128, 64), nn.ReLU(inplace=True),nn.Linear(64, 10))
def forward(self, x):
x = x.view(x.size(0), -1)
x = self.fc(x)
return x
def train(model, train_loader, optimizer, criterion, device):
model.train()
for batch_idx, (data, target) in enumerate(train_loader):
data, target = data.to(device), target.to(device)
optimizer.zero_grad()
output = model(data)
loss = criterion(output, target)
loss.backward()
optimizer.step()
if batch_idx % 100 == 0:
print('Train Epoch: {} [{}/{} ({:.0f}%)]\tLoss: {:.6f}'.format(
epoch, batch_idx * len(data), len(train_loader.dataset),
100. * batch_idx / len(train_loader), loss.item()))
return loss.item()
def test(model, test_loader, test_dataset, criterion, device):model.eval()
test_loss = 0
correct = 0
with torch.no_grad():
for data, target in test_loader:
data, target = data.to(device), target.to(device)
output = model(data)
test_loss += criterion(output, target).item()
相关文章:

计算机视觉
目录 一、图像处理 main denoise 二、Harris角点检测 三、Hough变换直线检测 四、直方图显著性检测 五、人脸识别 六、kmeans import 函数 kmeanstext 七、神经网络 常用函数: imread----------读取图像 imshow---------显示图像 rgb2hsv---------RGB转…...

NSSCTF第10页(3)
[LitCTF 2023]彩蛋 第一题: LitCTF{First_t0_The_k3y! (1/?) 第三题: <?php // 第三个彩蛋!(看过头号玩家么?) // R3ady_Pl4yer_000ne (3/?) ?> 第六题: wow 你找到了第二个彩蛋哦~ _S0_ne3t? (2/?) 第七题…...

MySQL性能分析工具的使用
1. 统计SQL的查询成本:last_query_cost SHOW STATUS LIKE last_query_cost; 使用场景:它对于比较开销是非常有用的,特别是我们有好几种查询方式可选的时候。 SQL 查询是一个动态的过程,从页加载的角度来看,我们可以得到…...

Uniapp使用AES128加解密16进制
在对接低功耗蓝牙时,我们需要对蓝牙传输数据进行加解密,由于我们对接的命令是16进制,如5500020101aa00,每个16进制表示特定的含义,所以直接对16进制加解密 import CryptoJS from crypto-js// AES128 加密函数 functio…...

C++基础——类与对象
1 概述 C是面向对象的语言,面向对象语言三大特性:封装、继承、多态。 C将万事万物抽象为对象,对象上有其属性和行为。 2 封装 2.1 封装的意义 封装是面向对象的三大特性之一,封装将属性和行为作为一个整体,对属性和…...

人工智能-卷积神经网络
从全连接层到卷积 我们之前讨论的多层感知机十分适合处理表格数据,其中行对应样本,列对应特征。 对于表格数据,我们寻找的模式可能涉及特征之间的交互,但是我们不能预先假设任何与特征交互相关的先验结构。 此时,多层感…...
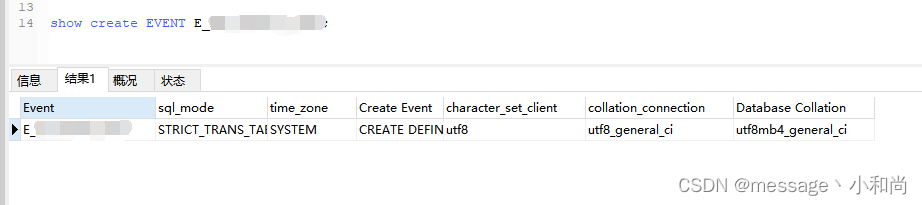
MySQL的event的使用方法
MySQL的event的使用方法 一、事件定时策略 1、查看event事件开启状态 SHOW VARIABLES LIKE event_scheduler;如图,Value值 ON:打开,OFF:关闭。 2、设置event事件打开 SET GLOBAL event_scheduler ON;如果MySQL重启了&#x…...
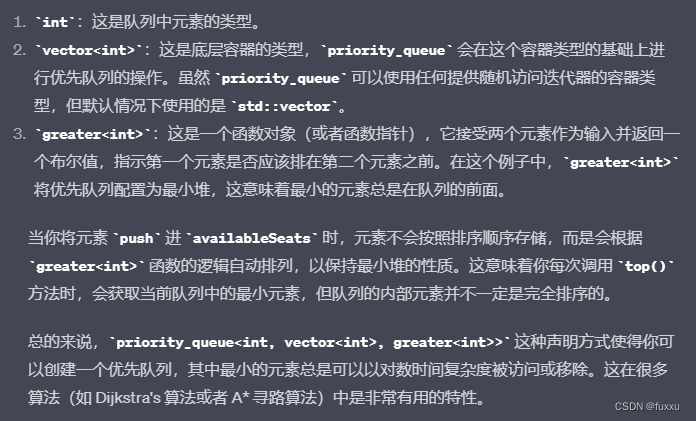
Leetcode Daily Challenge 1845. Seat Reservation Manager
1845. Seat Reservation Manager 题目要求:初始化一个SeatManager类包括默认构造函数和类函数,所有的seat初始化为true。reverse函数返回最小的true,然后把这个编号的椅子赋值为false。unreverse(seatNumber)函数把编号为seatNumber的椅子恢…...

Blender vs 3ds Max:谁才是3D软件的未来
在不断发展的3D建模和动画领域,两大软件巨头Blender和3ds Max一直在争夺顶级地位。 随着技术的进步和用户需求的演变,一个重要问题逐渐浮出水面:Blender是否最终会取代3ds Max?本文将深入探讨二者各自的优势和劣势、当前状况&…...
MapReduce:大数据处理的范式
一、介绍 在当今的数字时代,生成和收集的数据量正以前所未有的速度增长。这种数据的爆炸式增长催生了大数据领域,传统的数据处理方法往往不足。MapReduce是一个编程模型和相关框架,已成为应对大数据处理挑战的强大解决方案。本文探讨了MapRed…...
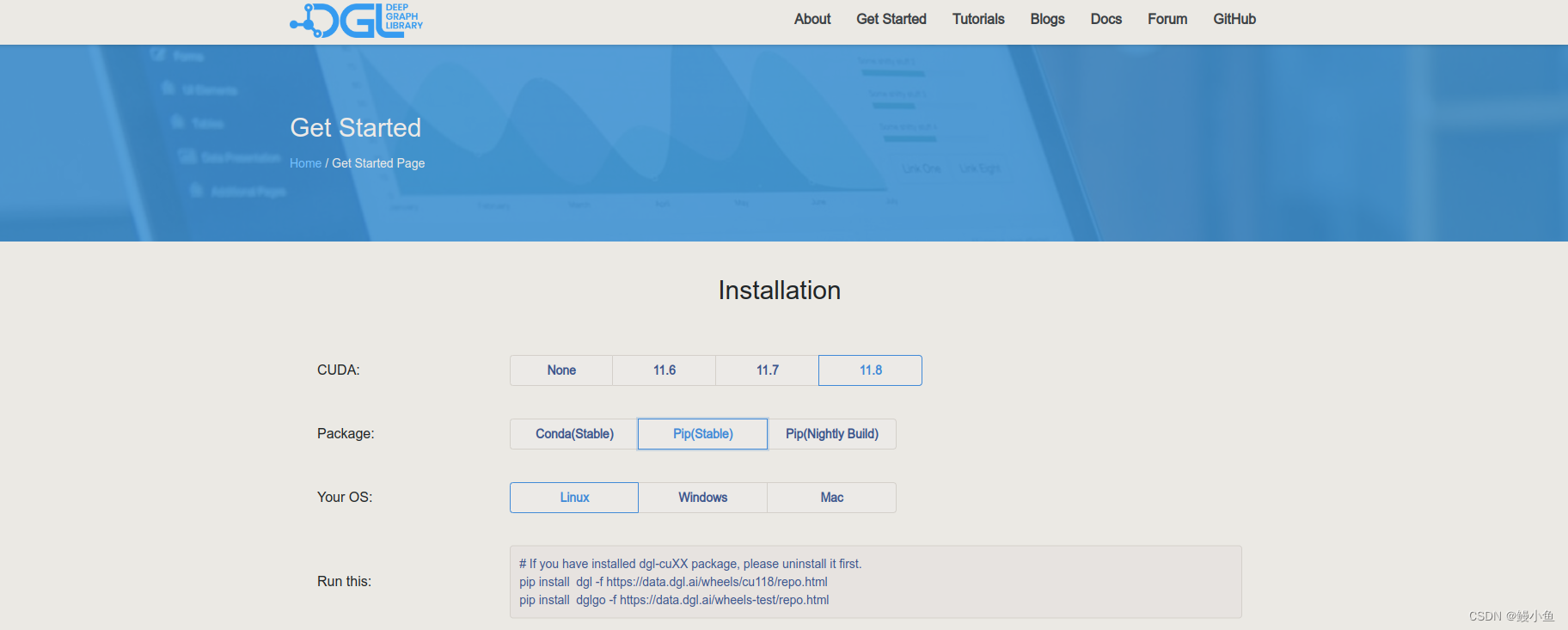
【已解决】ModuleNotFoundError: No module named ‘dgl‘
禁止使用下面方法安装DGL,这种方法会更新你的pytorch版本,环境越变越乱 pip install dgl 二是进入DGL官网:Deep Graph Library (dgl.ai),了解自己的配置情况,比如我cuda11.8,ubuntu,当然和linux是一样的 …...

R 复习 菜鸟教程
R语言老师说R好就业,学就完了 基础语法 cat()可以拼接函数: > cat(1, "加", 1, "等于", 2, \n) 1 加 1 等于 2sink():重定向 sink("r_test.txt", splitTRUE) # 控制台同样输出 for (i in 1:5) print(i…...

第十二章《搞懂算法:朴素贝叶斯是怎么回事》笔记
朴素贝叶斯是经典的机器学习算法,也是统计模型中的一个基本方法。它的基本思想是利用统计学中的条件概率来进行分类。它是一种有监督学习算法,其中“朴素”是指该算法基于样本特征之间相互独立这个“朴素”假设。朴素贝叶斯原理简单、容易实现࿰…...

【从0到1开发一个网关】网关Mock功能的实现
文章目录 什么是Mock?如何实现Mock什么是Mock? Mock(模拟)是一种测试技术,用于创建虚拟对象来模拟真实对象的行为。Mock对象模拟了真实对象的行为,但是不依赖于真实对象的实现细节。它们可以在测试中替代真实对象,以便进行独立的单元测试。 需要使用Mock的原因包括以下几…...

前端框架Vue学习 ——(三)Vue生命周期
生命周期:指一个对象从创建到销毁的整个过程。 生命周期的八个阶段:每触发一个生命周期事件,会自动执行一个生命周期方法(钩子) mounted:挂载完成,Vue 初始化成功,HTML 页面渲染成功…...
相机滤镜软件Nevercenter CameraBag Photo mac中文版特点介绍
Nevercenter CameraBag Photo mac是一款相机和滤镜应用程序,它提供了一系列先进的滤镜、调整工具和预设,可以帮助用户快速地优化和编辑照片。 Nevercenter CameraBag Photo mac软件特点介绍 1. 滤镜:Nevercenter CameraBag Photo提供了超过2…...

游戏专用....
游戏专用:星际战甲 APP窗口以及键鼠监控 import tkinter as tk import time,threading from pynput.keyboard import Key,Listener import pynput.keyboard as kbclass myClass:def __init__(self):self.root tk.Tk()self.new_text self.flag threading.Event()…...

第三方登录和第三方支付
第三方登录 在现代Web应用中,提供第三方登录选项已经变得非常普遍。用户可以使用其社交媒体或其他在线帐户(如Google、GitHub或Facebook)来访问您的应用程序,而无需创建新的用户名和密码。这提供了更好的用户体验,减少…...

SpringMvc执行流程(含过滤器Filter+拦截器interceptor)
目录 1.Mvc的概念 2.SpringMvc的概念 3.SpringMvc的核心组件 4.SpringMvc的执行流程 5.SpringMvcFilterInterceptor执行流程 一、Mvc的概念 Mvc(Model View Controller):Mvc是一种设计规范,它将数据、视图、业务逻辑代码进行分离,降低代码…...
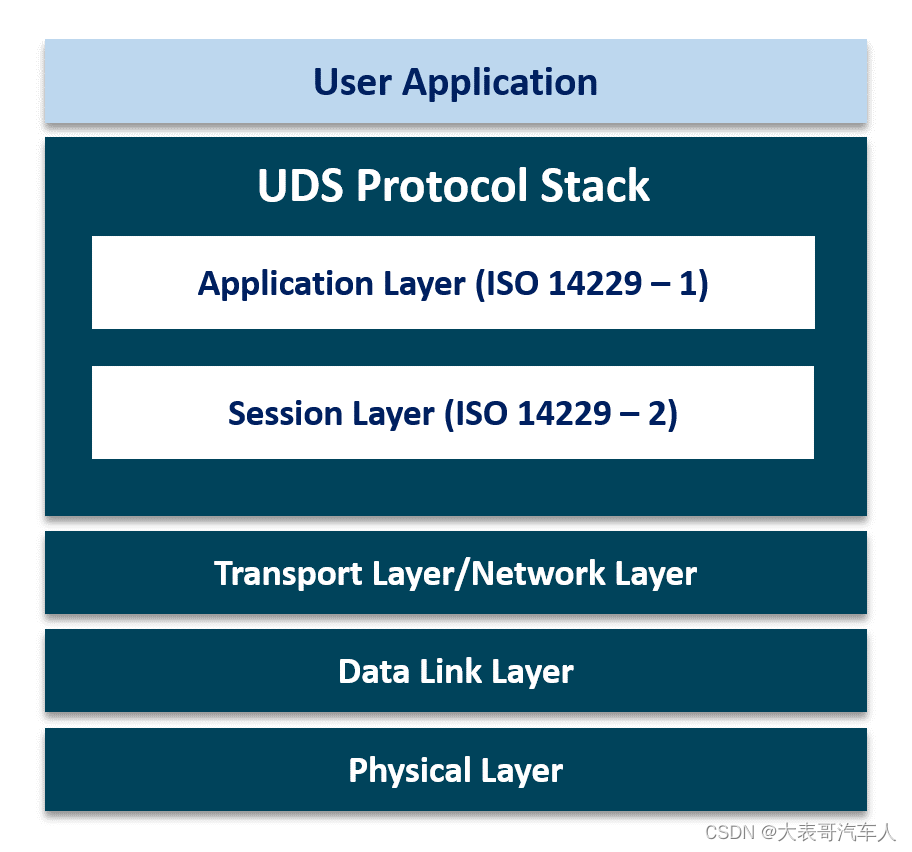
【UDS基础】简单介绍“统一诊断服务“
1. 前言 我们将在这个实用教程中介绍UDS的基础知识,重点关注在CAN总线上的UDS(UDSonCAN)和CAN诊断(DoCAN)。此外,我们还会介绍ISO-TP协议,并解释UDS、OBD2、WWH-OBD和OBDonUDS之间的差异。 最后,我们将解释如何请求、记录和解码UDS消息,并提供一些实际示例,例如记录…...

《我看见的世界:李飞飞自传》第1-6章阅读笔记:从移民少女到AI教母的“看见“之旅
前言 当我们谈论人工智能时,我们谈论的是算法、数据、算力,是那些冰冷的代码和复杂的模型。但在《我看见的世界:李飞飞自传》中,李飞飞用她独特的视角告诉我们:AI的本质,是人类对"看见"世界的渴望…...

2026年LLM推理加速全景:量化、投机解码与KV Cache工程实战
大语言模型推理速度慢、成本高,是阻碍AI大规模落地的核心障碍之一。一个7B参数的模型,在标准配置下每秒只能生成约30个token,对于需要实时响应的应用来说几乎无法接受。但2026年,一系列推理加速技术的成熟,让这一局面发…...

通过用量看板分析团队大模型API消耗发现优化调用策略的机会
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 通过用量看板分析团队大模型API消耗发现优化调用策略的机会 作为团队的技术负责人,确保大模型API调用在满足业务需求的…...

真可用!美团数字人模型开源,MV、电商等统统拿下
美团开源的数字人视频生成框架 LongCat-Video-Avatar 刚刚更新到 1.5 版本。是真能用。这版更新把音频编码器换了,推理步数砍到8步,在770人、13240条主观评分的大规模评测里,雷达图面积全面领先。音频编码器换血,8步出图LongCat-V…...

基于SMD与贝壳的微型音频装置:从电路设计到嵌入式开发的完整实践
1. 项目概述:一个藏在贝壳里的声音世界你小时候有没有捡起一个海螺壳,把它贴在耳边,然后听到里面传来“呜呜”的海风声?那个瞬间,仿佛整个海洋都被装进了小小的贝壳里。今天这个项目,就是把那个童年的魔法&…...

输电线路在线监测系统|架空线路安全运行的“第一道防线“!
输电线路微气象监测站是专为高压输电线路、电网廊道、杆塔运维量身打造的专利级一体化微气象智能监测设备。依托双专利超声波探测技术、六要素集成传感架构、无启动风速高精测量、智能抗干扰稳控系统,实现输电线路沿线气象24小时全自动捕捉、动态实时监测、大风风险…...

如何在5分钟内使用CrewAI Studio快速搭建AI工作流:零代码AI智能体开发终极指南
如何在5分钟内使用CrewAI Studio快速搭建AI工作流:零代码AI智能体开发终极指南 【免费下载链接】CrewAI-Studio A user-friendly, multi-platform GUI for managing and running CrewAI agents and tasks. Supports Conda and virtual environments, no coding need…...

Java网络编程基础分享
在学习 Java 的过程中,网络编程是非常重要的一环。无论是后端开发、分布式系统、即时通讯、文件传输,还是游戏服务、物联网设备,都离不开网络通信一、计算机网络基础1.1 什么是计算机网络把不同地理位置、具有独立功能的计算机,通…...

taotoken用量看板如何帮助团队精细化管理api调用成本
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 taotoken用量看板如何帮助团队精细化管理api调用成本 对于团队管理者而言,将大模型能力集成到产品开发或业务流程中&am…...

第5章 薪资重构——AI时代的程序员价值重估
第5章 薪资重构——AI时代的程序员价值重估 核心问题:AI时代,程序员的薪资会发生怎样的变化?哪些人在涨薪?哪些人在降薪? 5.1 问题定义:薪资分化的真相是什么? 5.1.1 一个令人震惊的数据 2026年第一季度,一个对比让整个技术圈哗然: 同一家公司内部: - 一个AI方向…...