pytorch加载的cifar10数据集,到底有没有经过归一化
pytorch加载cifar10的归一化
- pytorch怎么加载cifar10数据集
- torchvision.datasets.CIFAR10
- transforms.Normalize()进行归一化到底在哪里起作用?【CIFAR10源码分析】
- torchvision.datasets加载的数据集搭配Dataloader使用
- model.train()和model.eval()
pytorch怎么加载cifar10数据集
torchvision.datasets.CIFAR10
pytorch里面的torchvision.datasets中提供了大多数计算机视觉领域相关任务的数据集,可以根据实际需要加载相关数据集——需要cifar10就用torchvision.datasets.CIFAR10(),需要SVHN就调用torchvision.datasets.SVHN()。
针对cifar10数据集而言,调用torchvision.datasets.CIFAR10(),其中root是下载数据集后保存的位置;train是一个bool变量,为true就是训练数据集,false就是测试数据集;download也是一个bool变量,表示是否下载;transform是对数据集中的"image"进行一些操作,比如归一化、随机裁剪、各种数据增强操作等;target_transform是针对数据集中的"label"进行一些操作。

示例代码如下:
# 加载训练数据集
train_data = datasets.CIFAR10(root='../_datasets', train=True, download=True,transform= transforms.Compose([ transforms.ToTensor(), transforms.Normalize(mean=[0.5, 0.5, 0.5], std=[0.5, 0.5, 0.5]) # 归一化 ]) )
# 加载测试数据集
test_data = datasets.CIFAR10(root='../_datasets', train=False,download=True, transform= transforms.Compose([ transforms.ToTensor(), transforms.Normalize(mean=[0.5, 0.5, 0.5], std=[0.5, 0.5, 0.5]) # 归一化 ]) )
transforms.Normalize()进行归一化到底在哪里起作用?【CIFAR10源码分析】
上面的代码中,我们用transforms.Compose([……])组合了一系列的对image的操作,其中trandforms.ToTensor()和transforms.Normalize()都涉及到归一化操作:
-
原始的cifar10数据集是numpy array的形式,其中数据范围是[0,255],pytorch加载时,并没有改变数据范围,依旧是[0,255],加载后的数据维度是(H, W, C),源码部分:

-
__getitem__()函数中进行transforms操作,进行了归一化:实际上传入的transform在__getitem__()函数中被调用,其中transforms.Totensor()会将data(也就是image)的维度变成(C,H, W)的形式,并且归一化到[0.0,1.0];

transforms.Normalize()会根据z = (x-mean) / std 对数据进行归一化,上述代码中mean=[0.5, 0.5, 0.5], std=[0.5, 0.5, 0.5]是可以将3个通道单独进行归一化,3个通道可以设置不同的mean和std,最终数据范围变成[-0.5,+0.5] 。

所以如果通过pytorch的cifar10加载数据集后,针对traindataset.data,依旧是没有进行归一化的;但是比如traindataset[index].data,其中[index]这样的按下标取元素的操作会直接调用的__getitem__()函数,此时的data就是经过了归一化的。
除traindataset[index]会隐式自动调用__getitem__()函数外,还有什么时候会调用这个函数呢?毕竟……只有调用了这个函数才会调用transforms中的归一化处理。——答案是与dataloader搭配使用!
torchvision.datasets加载的数据集搭配Dataloader使用
torchvision.datasets实际上是torch.utils.data.Dataset的子类,那么就能传入Dataloader中,迭代的按batch-size获取批量数据,用于训练或者测试。其中dataloader加载dataset中的数据时,就是用到了其__getitem__()函数,所以用dataloader加载数据集,得到的是经过归一化后的数据。

model.train()和model.eval()
我发现上面的问题,是我用dataloader加载了训练数据集用于训练resnet18模型,训练过程中,我训练好并保存后,顺便测试了一下在测试数据集上的准确度。但是在测试的过程中,我没有用dataloader加载测试数据集,而是直接用的dataset.data来进行的测试。并且!由于是并没有将model设置成model.eval()【其实我设置了,但是我对自己很无语,我写的model.eval,忘记加括号了,无语呜呜】……也就是即便我的测试数据集没有经过归一化,由于模型还是在model.train()模式下,因此模型的BN层会自己调整,使得模型性能不受影响,因此在测试数据集上的accuracy达到了0.86,我就没有多想。
后来我用模型的时候,设置了model.eval()后,依旧是直接用的dataset.data(也就是没有归一化),不管是在测试数据集上还是在训练数据集上,accuracy都只有0.10+,我表示非常的迷茫疑惑啊!然后才发现是归一化的问题。
- 在
model.train()模式下进行预测时,PyTorch会默认启用一些训练相关的操作,例如Batch Normalization和Dropout,并且模型的参数是可变的,能够根据输入进行调整。这些操作在训练模式下可以帮助模型更好地适应训练数据,并产生较高的准确度。 - 在
model.eval()模式下进行预测时,PyTorch会将模型切换到评估模式,这会导致一些训练相关的操作行为发生变化。具体而言,Batch Normalization层会使用训练集上的统计信息进行归一化,而不是使用当前批次的统计信息。因此,如果输入数据没有进行归一化,模型在评估模式下的准确度可能会显著下降。
以下是我没有用dataloader加载数据集,进行预测的代码:
def correctness(model,data,target, device):batchsize = 1000batch_num = int(len(data) / batchsize) # 对原始的数据进行操作 从H.W.C变成C.H.W data = torch.tensor(data).permute(0,3,1,2).type(torch.FloatTensor).to(device)# 手动归一化data = data/255data = (data - 0.5) / 0.5 # 求一个batch的correctnessdef _batch_correctness(i):images, labels = data[i*batchsize : (i+1)*batchsize], target[i*batchsize : (i+1)*batchsize]predict = model(images).detach().cpu() correctness = np.array(torch.argmax(predict, dim = 1).numpy() == np.array(labels) , dtype= np.float32)return correctnessresult = np.array([_batch_correctness(i) for i in range(batch_num)])return result.flatten().sum()/data.shape[0]
我后面用上面的代码测试了四种情况:
- model.eval() + 没有归一化:train_accuracy = 0.10,test_accuracy = 0.10;
- model.eval() + 手动归一化:train_accuracy = 0.95,test_accuracy = 0.84;
- model.train() + 没有归一化:train_accuracy = 0.95,test_accuracy = 0.83;
- model.train() + 手动归一化:train_accuracy = 0.94,test_accuracy = 0.84;
由此可见,在model.eval()模式下,数据归一化对最终的测试结果有很大影响。
相关文章:
pytorch加载的cifar10数据集,到底有没有经过归一化
pytorch加载cifar10的归一化 pytorch怎么加载cifar10数据集torchvision.datasets.CIFAR10transforms.Normalize()进行归一化到底在哪里起作用?【CIFAR10源码分析】 torchvision.datasets加载的数据集搭配Dataloader使用model.train()和model.eval() pytorch怎么加载…...
Day1 ARM基础
【ARM课程认知】 1.ARM课程的作用 承上启下 基础授课阶段:c语言、数据结构、linux嵌入式应用层课程:IO、进程线程、网络编程嵌入式底层课程:ARM体系结构、系统移植、linux设备驱动c/QT 2.ARM课程需要掌握的内容 自己能够实现简单的汇编编…...

ns3入门基础教程
ns3入门基础教程 文章目录 ns3入门基础教程ns环境配置测试ns3环境ns3简单案例 ns环境配置 官方网站:https://www.nsnam.org/releases/ 代码仓库:https://gitlab.com/nsnam/ns-3-dev 如果安装遇到问题,可以参考以下博文: https://…...

计算机视觉
目录 一、图像处理 main denoise 二、Harris角点检测 三、Hough变换直线检测 四、直方图显著性检测 五、人脸识别 六、kmeans import 函数 kmeanstext 七、神经网络 常用函数: imread----------读取图像 imshow---------显示图像 rgb2hsv---------RGB转…...

NSSCTF第10页(3)
[LitCTF 2023]彩蛋 第一题: LitCTF{First_t0_The_k3y! (1/?) 第三题: <?php // 第三个彩蛋!(看过头号玩家么?) // R3ady_Pl4yer_000ne (3/?) ?> 第六题: wow 你找到了第二个彩蛋哦~ _S0_ne3t? (2/?) 第七题…...

MySQL性能分析工具的使用
1. 统计SQL的查询成本:last_query_cost SHOW STATUS LIKE last_query_cost; 使用场景:它对于比较开销是非常有用的,特别是我们有好几种查询方式可选的时候。 SQL 查询是一个动态的过程,从页加载的角度来看,我们可以得到…...

Uniapp使用AES128加解密16进制
在对接低功耗蓝牙时,我们需要对蓝牙传输数据进行加解密,由于我们对接的命令是16进制,如5500020101aa00,每个16进制表示特定的含义,所以直接对16进制加解密 import CryptoJS from crypto-js// AES128 加密函数 functio…...

C++基础——类与对象
1 概述 C是面向对象的语言,面向对象语言三大特性:封装、继承、多态。 C将万事万物抽象为对象,对象上有其属性和行为。 2 封装 2.1 封装的意义 封装是面向对象的三大特性之一,封装将属性和行为作为一个整体,对属性和…...

人工智能-卷积神经网络
从全连接层到卷积 我们之前讨论的多层感知机十分适合处理表格数据,其中行对应样本,列对应特征。 对于表格数据,我们寻找的模式可能涉及特征之间的交互,但是我们不能预先假设任何与特征交互相关的先验结构。 此时,多层感…...
MySQL的event的使用方法
MySQL的event的使用方法 一、事件定时策略 1、查看event事件开启状态 SHOW VARIABLES LIKE event_scheduler;如图,Value值 ON:打开,OFF:关闭。 2、设置event事件打开 SET GLOBAL event_scheduler ON;如果MySQL重启了&#x…...
Leetcode Daily Challenge 1845. Seat Reservation Manager
1845. Seat Reservation Manager 题目要求:初始化一个SeatManager类包括默认构造函数和类函数,所有的seat初始化为true。reverse函数返回最小的true,然后把这个编号的椅子赋值为false。unreverse(seatNumber)函数把编号为seatNumber的椅子恢…...

Blender vs 3ds Max:谁才是3D软件的未来
在不断发展的3D建模和动画领域,两大软件巨头Blender和3ds Max一直在争夺顶级地位。 随着技术的进步和用户需求的演变,一个重要问题逐渐浮出水面:Blender是否最终会取代3ds Max?本文将深入探讨二者各自的优势和劣势、当前状况&…...
MapReduce:大数据处理的范式
一、介绍 在当今的数字时代,生成和收集的数据量正以前所未有的速度增长。这种数据的爆炸式增长催生了大数据领域,传统的数据处理方法往往不足。MapReduce是一个编程模型和相关框架,已成为应对大数据处理挑战的强大解决方案。本文探讨了MapRed…...
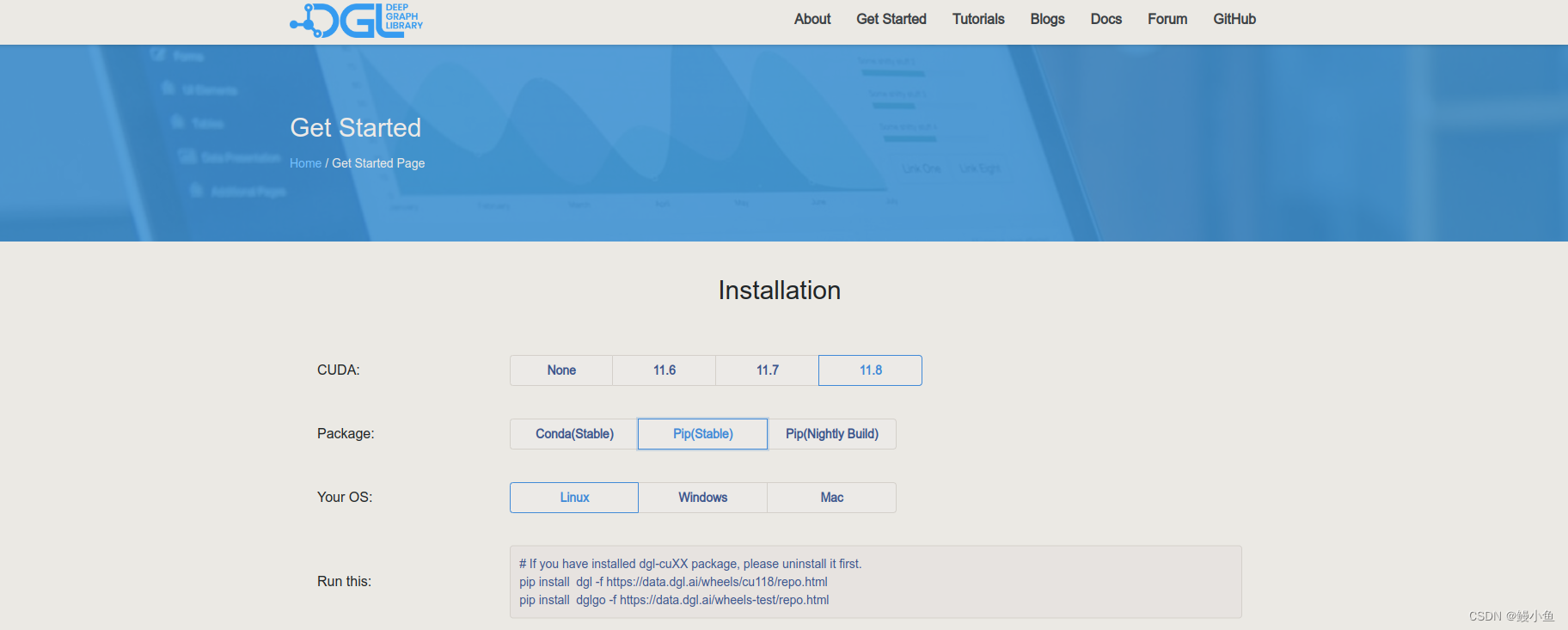
【已解决】ModuleNotFoundError: No module named ‘dgl‘
禁止使用下面方法安装DGL,这种方法会更新你的pytorch版本,环境越变越乱 pip install dgl 二是进入DGL官网:Deep Graph Library (dgl.ai),了解自己的配置情况,比如我cuda11.8,ubuntu,当然和linux是一样的 …...

R 复习 菜鸟教程
R语言老师说R好就业,学就完了 基础语法 cat()可以拼接函数: > cat(1, "加", 1, "等于", 2, \n) 1 加 1 等于 2sink():重定向 sink("r_test.txt", splitTRUE) # 控制台同样输出 for (i in 1:5) print(i…...

第十二章《搞懂算法:朴素贝叶斯是怎么回事》笔记
朴素贝叶斯是经典的机器学习算法,也是统计模型中的一个基本方法。它的基本思想是利用统计学中的条件概率来进行分类。它是一种有监督学习算法,其中“朴素”是指该算法基于样本特征之间相互独立这个“朴素”假设。朴素贝叶斯原理简单、容易实现࿰…...

【从0到1开发一个网关】网关Mock功能的实现
文章目录 什么是Mock?如何实现Mock什么是Mock? Mock(模拟)是一种测试技术,用于创建虚拟对象来模拟真实对象的行为。Mock对象模拟了真实对象的行为,但是不依赖于真实对象的实现细节。它们可以在测试中替代真实对象,以便进行独立的单元测试。 需要使用Mock的原因包括以下几…...

前端框架Vue学习 ——(三)Vue生命周期
生命周期:指一个对象从创建到销毁的整个过程。 生命周期的八个阶段:每触发一个生命周期事件,会自动执行一个生命周期方法(钩子) mounted:挂载完成,Vue 初始化成功,HTML 页面渲染成功…...
相机滤镜软件Nevercenter CameraBag Photo mac中文版特点介绍
Nevercenter CameraBag Photo mac是一款相机和滤镜应用程序,它提供了一系列先进的滤镜、调整工具和预设,可以帮助用户快速地优化和编辑照片。 Nevercenter CameraBag Photo mac软件特点介绍 1. 滤镜:Nevercenter CameraBag Photo提供了超过2…...

游戏专用....
游戏专用:星际战甲 APP窗口以及键鼠监控 import tkinter as tk import time,threading from pynput.keyboard import Key,Listener import pynput.keyboard as kbclass myClass:def __init__(self):self.root tk.Tk()self.new_text self.flag threading.Event()…...

高性能Windows流媒体服务器部署:5大核心技术与3种实战架构深度解析
高性能Windows流媒体服务器部署:5大核心技术与3种实战架构深度解析 【免费下载链接】srs-windows 项目地址: https://gitcode.com/gh_mirrors/sr/srs-windows 在Windows平台上构建专业级流媒体服务系统,需要综合考虑协议兼容性、性能优化和部署架…...
:数组排序、去重、查找)
数组专项(一):数组排序、去重、查找
大家好,欢迎来到《算法面试60讲(2026最新版全真题带解析)》第19篇!上一篇我们彻底吃透了字符串专项的核心难点——BF暴力匹配与KMP高效匹配算法,搞定了字符串模块面试最难的算法考点。从本节课开始,我们正式进入算法面试第一高频模块:数组专项。 在算法面试中,数组是出…...

微信小程序3D开发框架技术对比:XR-Frame与threejs-miniprogram
随着微信小程序逐步支持3D渲染与AR能力,开发者面临两个主要官方方案:自研的XR-Frame和适配Three.js的threejs-miniprogram。本文将从架构设计、渲染机制、功能集成、开发模式及适用场景等维度进行技术分析,为技术选型提供参考。一、XR-Frame&…...

终极免费方案:WandEnhancer完整解锁WeMod Pro功能快速指南
终极免费方案:WandEnhancer完整解锁WeMod Pro功能快速指南 【免费下载链接】Wand-Enhancer Advanced UX and interoperability extension for Wand (WeMod) app 项目地址: https://gitcode.com/gh_mirrors/we/Wand-Enhancer 你是否渴望享受WeMod Pro会员的所…...

PCB虚焊/走线断裂/焊盘脱落工程师易漏判
PCB 故障中,30% 并非元件损坏,而是 PCB 本身的隐性故障—— 虚焊、走线断裂、焊盘脱落、过孔开路。这类故障外观隐蔽、时好时坏、排查难度大,很多工程师反复更换元件仍无法解决,最终误判为 “板报废”。一、PCB 隐性故障核心成因…...

Airtest Poco实战:5分钟搞定微信小程序自动化测试环境搭建与元素抓取
Airtest Poco实战:5分钟搞定微信小程序自动化测试环境搭建与元素抓取微信小程序作为轻量级应用的代表,已经渗透到电商、社交、工具等各个领域。随着小程序功能的日益复杂,自动化测试成为保障产品质量的重要手段。本文将带你快速搭建微信小程序…...
原理与ScalableHD架构优化实践)
超维计算(HDC)原理与ScalableHD架构优化实践
1. 超维计算(HDC)基础解析超维计算(Hyperdimensional Computing, HDC)是一种受大脑信息处理机制启发的计算范式,其核心思想是用高维随机向量(通常称为超向量或HV)来表示和处理信息。与传统神经网…...

具身智能:面向新兴交叉学科建设的思考与建议 2026
这份由 CCF YOCSEF 长三角五地学术委员会 2026 年 5 月发布的白皮书,聚焦具身智能作为新兴交叉学科的建设,明确其并非 AI 与机器人学的简单拼接,而是围绕物理交互中的智能行为形成的新问题域,提出 “三大基本问题 一个应用需求”…...
)
用Python复现Nature论文:仅需100次循环数据,提前预测锂电池寿命(附完整代码与数据集)
用Python实战预测锂电池寿命:从数据特征到模型部署全解析锂电池作为现代能源存储的核心组件,其寿命预测一直是工业界和学术界关注的焦点。传统方法往往需要等待电池出现明显容量衰减才能进行判断,而最新研究表明,通过分析早期循环…...

多模型聚合平台如何助力网站AIB测试与选型
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 多模型聚合平台如何助力网站AIB测试与选型 对于网站产品经理而言,首页文案的生成质量直接影响用户的第一印象和转化率。…...