计算3D目标框的NMS
3D障碍物目标框(中心点坐标XYZ、长宽高lwh、朝向角theta)的非极大值抑制
#include <iostream>
#include <vector>
#include <algorithm>
#include <opencv2/opencv.hpp>// 定义3D目标框的结构体
struct BoundingBox3D
{double centerX, centerY, centerZ; // 中心点坐标double length, width, height; // 长宽高double theta; // 朝向角double score; // 目标框得分BoundingBox3D(double x, double y, double z, double l, double w, double h, double t, double s): centerX(x), centerY(y), centerZ(z), length(l), width(w), height(h), theta(t), score(s) {}
};class NMS3D
{
public:// 构造函数,传入IoU阈值NMS3D(double iouThreshold) : iouThreshold_(iouThreshold) {}// 执行NMSstd::vector<BoundingBox3D> executeNMS(const std::vector<BoundingBox3D> &boxes){std::vector<BoundingBox3D> resultBoxes;// 按得分降序排序std::vector<BoundingBox3D> sortedBoxes = sortBoxesByScore(boxes);// 遍历排序后的框while (!sortedBoxes.empty()){// 保留得分最高的框BoundingBox3D topBox = sortedBoxes[0];resultBoxes.push_back(topBox);// 移除与当前框IoU大于阈值的框sortedBoxes.erase(sortedBoxes.begin());sortedBoxes = removeOverlappingBoxes(topBox, sortedBoxes);}return resultBoxes;}private:// 按得分降序排序std::vector<BoundingBox3D> sortBoxesByScore(const std::vector<BoundingBox3D> &boxes){std::vector<BoundingBox3D> sortedBoxes = boxes;std::sort(sortedBoxes.begin(), sortedBoxes.end(),[](const BoundingBox3D &a, const BoundingBox3D &b){return a.score > b.score;});return sortedBoxes;}// 移除与指定框IoU大于阈值的框std::vector<BoundingBox3D> removeOverlappingBoxes(const BoundingBox3D &box,const std::vector<BoundingBox3D> &boxes){std::vector<BoundingBox3D> filteredBoxes;for (const auto &b : boxes){if (calculateIoU(box, b) < iouThreshold_){filteredBoxes.push_back(b);}}return filteredBoxes;}// 计算两个框的IoU(Intersection over Union)double calculateIoU(const BoundingBox3D &box1, const BoundingBox3D &box2){// 计算两个框的相交部分的体积double intersectionVolume = calculateIntersectionVolume(box1, box2);// 计算两个框的并集部分的体积double unionVolume = box1.length * box1.width * box1.height +box2.length * box2.width * box2.height -intersectionVolume;// 计算IoUreturn intersectionVolume / unionVolume;}// 计算两个框的相交部分的体积double calculateIntersectionVolume(const BoundingBox3D &box1, const BoundingBox3D &box2){// 计算平面重叠面积double intersectArea = calIntersectionArea(box1, box2);double intersectHeight = calculateOverlap(box1.centerZ, box1.height, box2.centerZ, box2.height);// 计算相交部分的体积return intersectArea * intersectHeight;}cv::Point rotatePoint(const cv::Point &point, double angle){double rotatedX = point.x * cos(angle) - point.y * sin(angle);double rotatedY = point.x * sin(angle) + point.y * cos(angle);return cv::Point(rotatedX, rotatedY);}double calIntersectionArea(const BoundingBox3D &box1, const BoundingBox3D &box2){cv::RotatedRect rect1(cv::Point2f(box1.centerX,box1.centerY),cv::Size2f(box1.width,box1.height),box1.theta);cv::RotatedRect rect2(cv::Point2f(box2.centerX,box2.centerY),cv::Size2f(box2.width,box2.height),box2.theta);std::vector<cv::Point2f> intersection;cv::rotatedRectangleIntersection(rect1,rect2, intersection);// std::cout <<rect1.center<< " "<<rect2.center<<std::endl;// std::cout <<rect1.size<< " "<<rect2.size<<std::endl;// std::cout << "intersection area:"<<intersection.size()<<std::endl;double union_area = cv::contourArea(intersection);// std::cout << "intersection area:"<<union_area<<std::endl;return union_area;}// 计算两个轴上的重叠部分长度double calculateOverlap(double center1, double size1, double center2, double size2){double halfSize1 = size1 / 2;double halfSize2 = size2 / 2;double min1 = center1 - halfSize1;double max1 = center1 + halfSize1;double min2 = center2 - halfSize2;double max2 = center2 + halfSize2;// 计算重叠部分长度return std::max(0.0, std::min(max1, max2) - std::max(min1, min2));}double iouThreshold_; // IoU阈值
};int main()
{std::vector<BoundingBox3D> inputBoxes;inputBoxes.push_back(BoundingBox3D(0.0, 0.0, 0.0, 200.0,200.0, 200.0, 45, 0.9));inputBoxes.push_back(BoundingBox3D(100,100, 10, 200.0, 200.0, 200.0, -45, 0.8));//inputBoxes.push_back(BoundingBox3D(2.0, 2.0, 2.0, 2.0, 1.0, 1.0, 0, 0.7));double iouThreshold = 0.5; // 可根据实际情况调整IoU阈值NMS3D nms(iouThreshold);std::vector<BoundingBox3D> resultBoxes = nms.executeNMS(inputBoxes);// 输出结果框for (const auto &box : resultBoxes){std::cout << "Center: (" << box.centerX << ", " << box.centerY << ", " << box.centerZ << "), "<< "Dimensions: (" << box.length << ", " << box.width << ", " << box.height << "), "<< "Theta: " << box.theta << ", "<< "Score: " << box.score << std::endl;}return 0;
}
关于cv::contourArea可能计算不准的问题,是由于传入的点没有按照一定的顺序排列(顺时针或逆时针)。参考解决博客
相关文章:

计算3D目标框的NMS
3D障碍物目标框(中心点坐标XYZ、长宽高lwh、朝向角theta)的非极大值抑制 #include <iostream> #include <vector> #include <algorithm> #include <opencv2/opencv.hpp>// 定义3D目标框的结构体 struct BoundingBox3D {double …...
【Java实现图书管理系统】
图书管理系统 1. 设计背景2. 设计思路3. 模块展示代码演示3.1 Book类3.2 BookList类(书架类)3.4 用户类 - User类3.5 子类管理员类 -- AdminUser类3.6 子类普通用户类 -- NormalUser类3.7 操作接口3.8 操作类3.8.1 查找操作 -- FindOperation类3.8.2 增加…...

ROS 多机器人导航RVIZ环境的配置
文章目录 前言一、添加多个2D Pose Estimate/2D nav Goal二、RVIZ的其他配置1.RobotModel 总结 前言 前文ROS Turtlebot3多机器人编队导航仿真写了多机器人呢导航的代码实现,本文主要说明,RVIZ导航环境的配置,如何添加多个2D Pose Estimate/…...
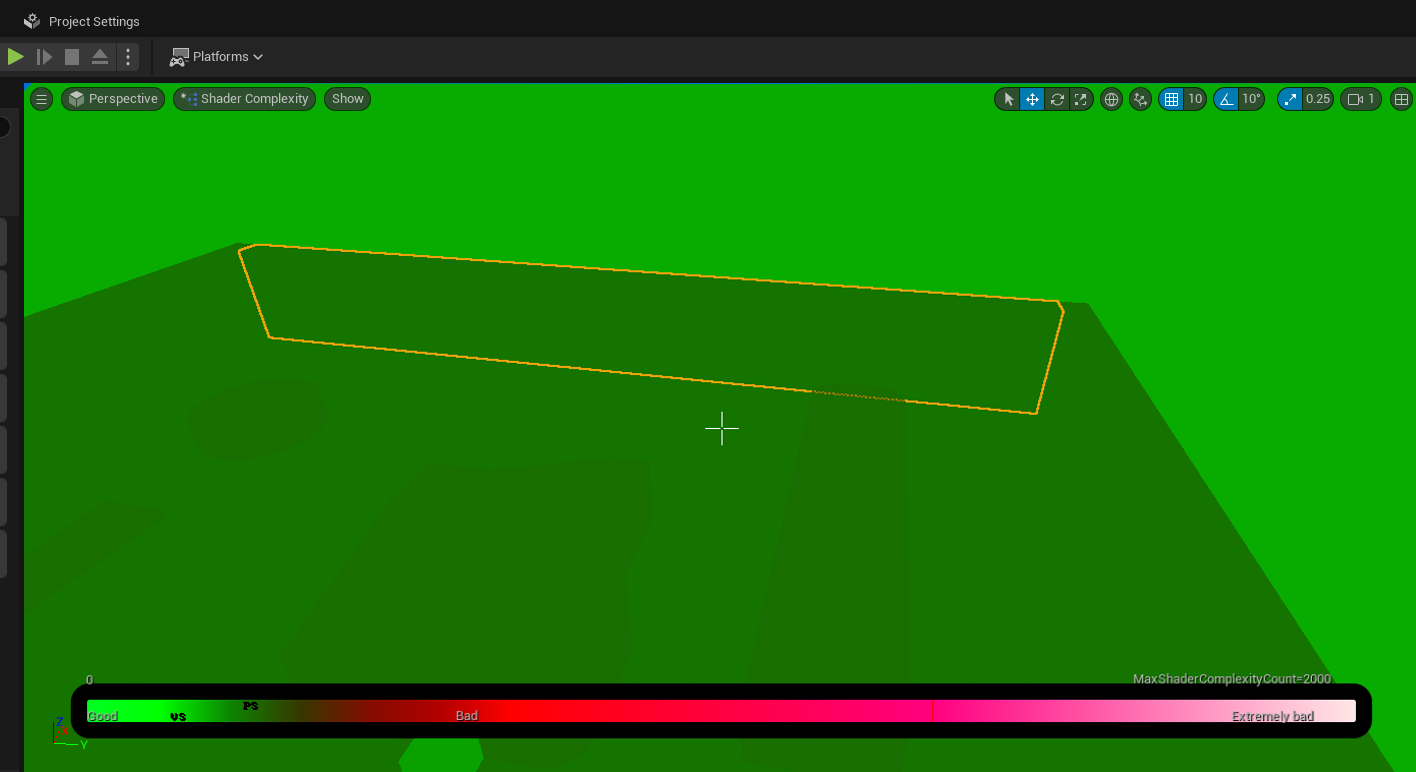
UE4 / UE5 内存与性能优化
性能优化 资源压缩粒子优化NavMeshGenerate Overlap EventGCMarkTime光照优化Shader优化卡的时间长LOD官方CPU、GPU Insights、stat cpu、 ue4 memory report、inter GPA 、RenderDOC、减少模型面数等 资源压缩 在图片资源上右键选择Size Map可以看到资源所占大小,…...

dotnet core程序部署到ubuntu
visual studio2022编译好的dotnet core程序,打开“程序包管理器控制台”,打包发布dotnet core,使用命令 dotnet publish -c Release -r ubuntu.22.04-x64打包会生成ubuntu22.04-x64文件夹,将这个文件夹传到ubuntu服务器,切换到ubu…...
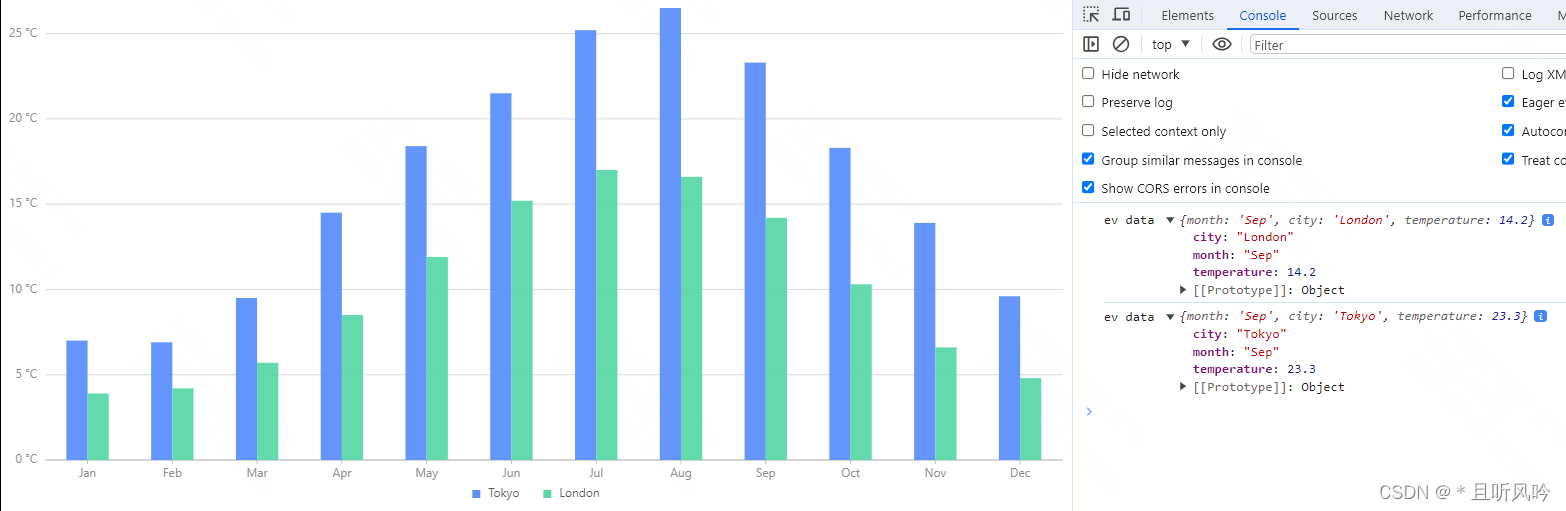
Antv/G2 柱状图添加自定义点击事件
<!DOCTYPE html> <html><head><meta charset"UTF-8"><title>柱状图点击事件</title></head><body><div id"container" /><script src"https://gw.alipayobjects.com/os/lib/antv/g2/4.2.8/…...
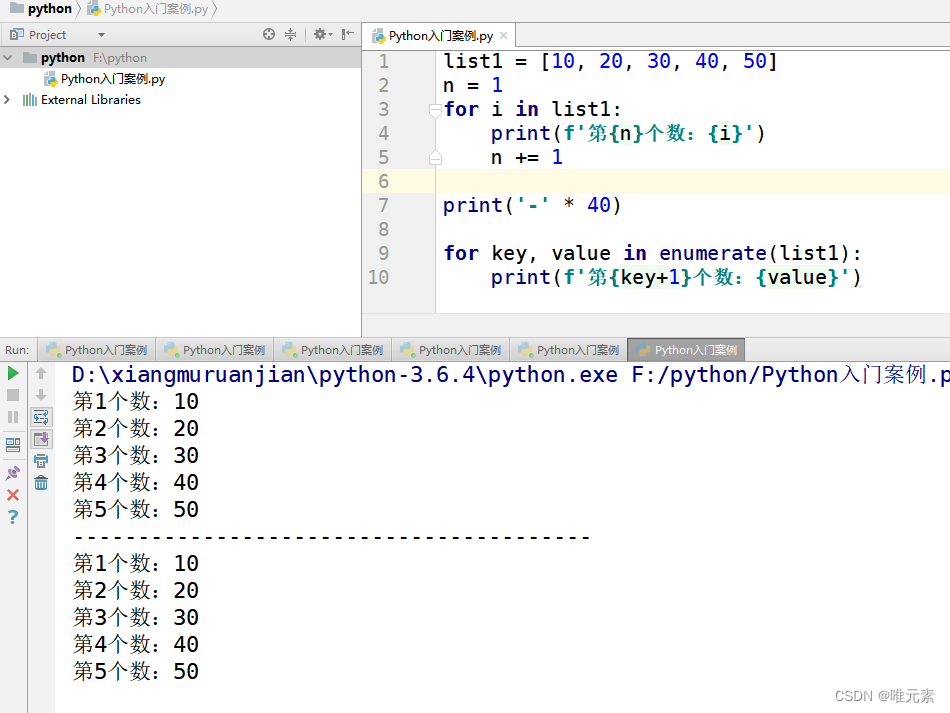
Python---数据序列中的公共方法
公共方法就是 支持大部分 数据 序列。 常见公共方法---简单 运算符描述支持的容器类型合并字符串、列表、元组* 复制字符串、列表、元组in元素是否存在字符串、列表、元组、字典not in元素是否不存在字符串、列表、元组、字典 案例: 合并 代码࿱…...
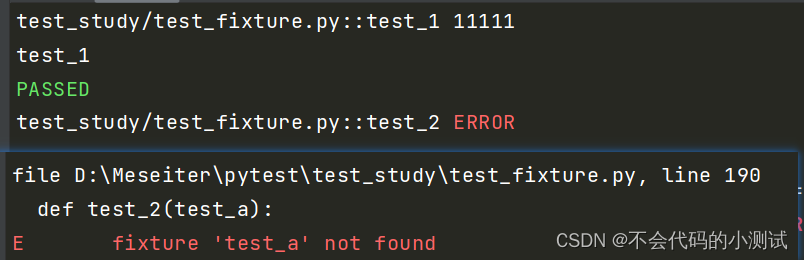
从0开始python学习-33.夹具@pytest.fixture(scope=““,params=““,autouse=““,ids=““,name=““)
目录 1. 创建夹具 1.1 pytest方式 1.2 unittest方式 2. 使用夹具 2.1 通过参数引用 2.2 通过函数引用 3. 参数详解 3.1 scope:作用域 3.2 params-参数化 3.3 autouseTrue表示自动使用,默认为False 3.4 ids:设置变量名 3.5 name&am…...
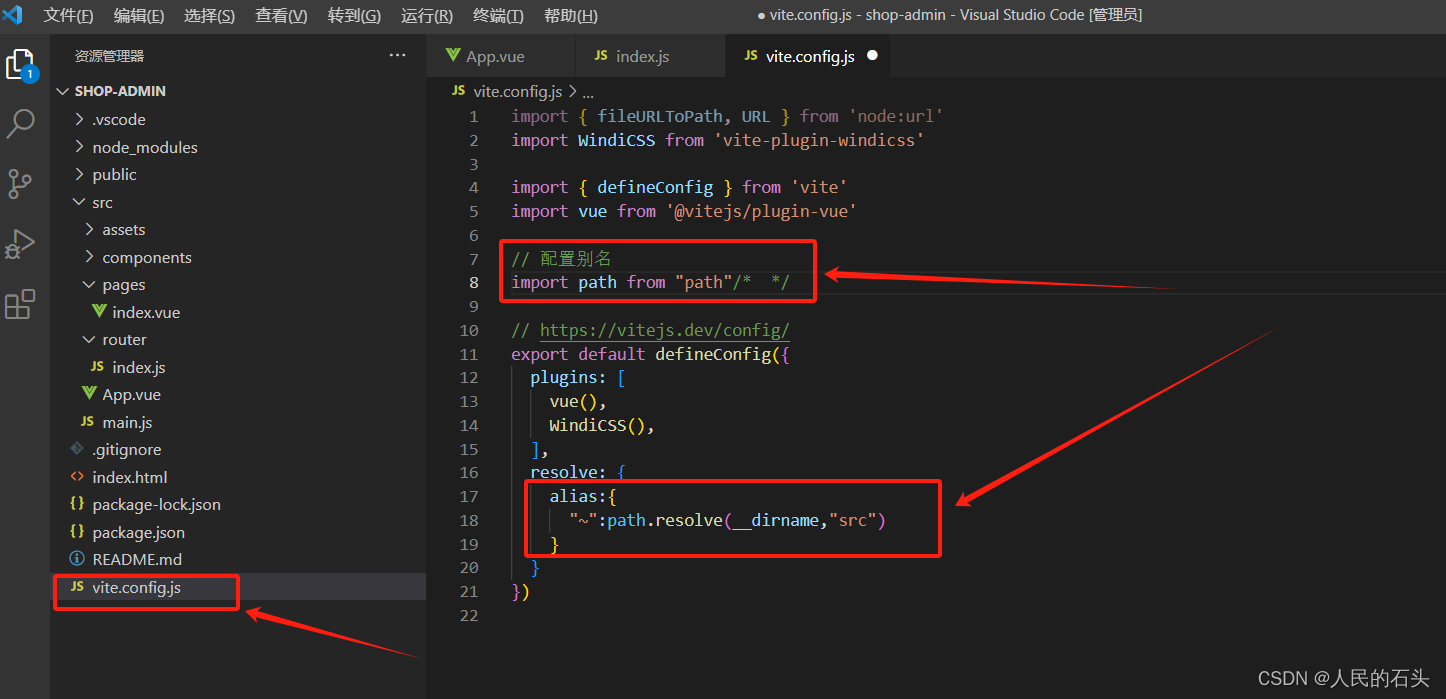
vue3别名配置(vite)
1、配置别名的优点: 在VUE项目中import导入文件时,可以写相对路径. 2、在vite.config.js中配置 a. 首先引入path import path from "path"/* */ b.在resolve添加别名,例如: alias:{"~":path.resolve(__di…...
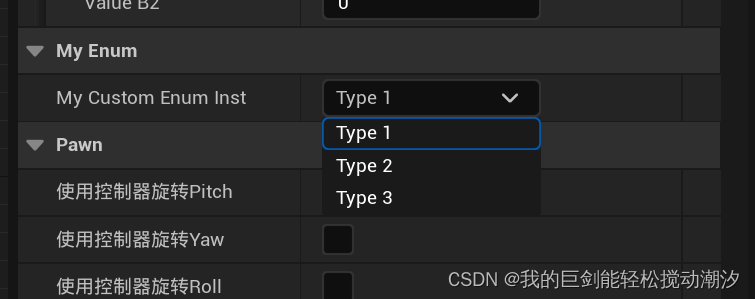
初学UE5 C++①
目录 游戏类 三种时间函数类型函数和提示类型 FName、FString、FText类型相互转化 数组容器 键值容器 集合容器 基本类型打印 UPROPERTY宏 函数 枚举 法1 法2 结构体 其他 蓝图生成时暴露 游戏类 1.创建所需项的类 2.创建游戏模式类,在该类上实现所需…...

ElasticSearch6.8.1 常见错误
1.vm.max_map_count max virtual memory areas vm.max_map_count [65530] is too low, increase to at least [262144] 1.1 修改 /etc/sysctl.conf 只添加最后vm值即可,sysctl -p /etc/sysctl.conf net.ipv4.conf.all.accept_redirects0 net.ipv4.tcp_tw_reuse1 n…...
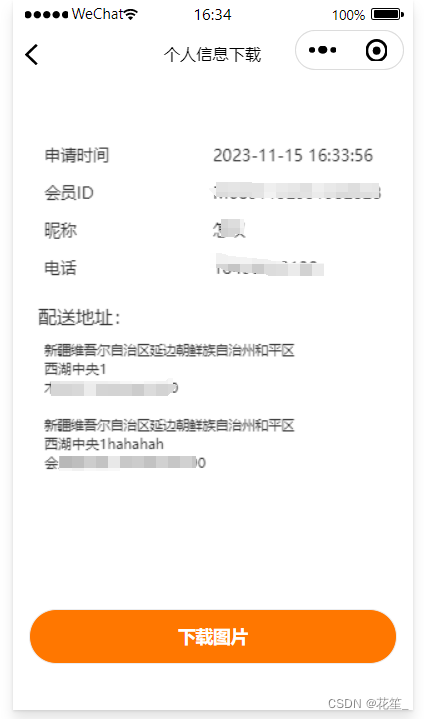
wx.canvasToTempFilePath生成图片保存到相册
微信小程序保存当前画布指定区域的内容导出生成指定大小的图片,记录一下 api:wx.canvasToTempFilePath 效果: 代码:wxml <canvas style"width: {{screenWidth}}px; height: {{canvasHeight}}px;" canvas-id"my…...

HDU1276:士兵队列训练问题 ← STL queue
【题目来源】http://acm.hdu.edu.cn/showproblem.php?pid1276【题目描述】 某部队进行新兵队列训练,将新兵从一开始按顺序依次编号,并排成一行横队,训练的规则如下:从头开始一至二报数,凡报到二的出列,剩下…...

JS 读取excel文件内容 和 将json数据导出excel文件
一、实现将json数据导出为excel文件 1、通过原生js实现 核心方法: function JSONToExcelConvertor(JSONData, FileName, title, filter) {if (!JSONData)return;//转化json为objectvar arrData typeof JSONData ! object ? JSON.parse(JSONData) : JSONData;va…...
ASP.NET限流器的简单实现
一、滑动时间窗口 我为RateLimiter定义了如下这个简单的IRateLimiter接口,唯一的无参方法TryAcquire利用返回的布尔值确定当前是否超出设定的速率限制。我只提供的两种基于时间窗口的实现,如下所示的基于“滑动时间窗口”的实现类型SliddingWindowRateL…...

汇编语言循环左移和循环右移如何实现的,详细的比喻一下
汇编语言中的循环左移(ROL)和循环右移(ROR)是两种基本的位操作,通常用于低级编程任务,如加密、解密、数据处理等。我将使用一个详细的比喻来解释这两种操作,以使其更易于理解。 循环左移&#…...

ChromeDriver 各版本下载地址
chromedriver 115及115之后版本下载地址:https://googlechromelabs.github.io/chrome-for-testing/ chromedriver 115之前版本下载地址:http://chromedriver.storage.googleapis.com/index.html...

计算机网络之物理层
物理层 1. 物理层的基本概念 2.物理层下面的传输媒体 传输媒体可分为两类,一类是导引型传输媒体,另一类是非导引型传输媒体。 3.传输方式 3.1 串行传输和并行传输 串行传输:串行传输是指数据是一个比特依次发送的,因此在发送端…...

沉浸式航天vr科普馆VR太空主题馆展示
科普教育从小做起,现在我们的很多地方小孩子游乐体验不单单只有草坪玩耍体验,还有很多科普知识的体验馆和游玩馆。虽然现在我们还不能真实的上太空或者潜入海底,但是这些现在已经可以逼真的展示在我们面前。通过一种虚拟现实技术手段。人们带…...

AI电话机器人能否代替人工?优缺点介绍
AI电话机器人是一种基于人工智能技术的自动语音系统,它可以模拟人类的语音交互,执行客服、销售、调查等任务。随着人工智能的发展,AI电话机器人的功能越来越强大,它们在某些领域已经能够替代人工执行任务。那么,AI电话…...
如何用Zotero PDF Translate插件高效阅读外文文献:一站式终极指南
如何用Zotero PDF Translate插件高效阅读外文文献:一站式终极指南 【免费下载链接】zotero-pdf-translate Translate PDF, EPub, webpage, metadata, annotations, notes to the target language. Support 20 translate services. 项目地址: https://gitcode.com/…...

构建高可用在线机器学习推理系统:分层回退架构设计与金融风控实践
1. 项目概述与核心挑战在金融科技领域,尤其是在线支付和信贷审批场景,机器学习模型已经从后台的分析工具,演变为实时业务决策的核心引擎。想象一下,当用户点击“确认支付”的瞬间,一个复杂的风控模型必须在几百毫秒内&…...

VisualGGPK2终极指南:如何轻松编辑《流放之路》游戏资源文件
VisualGGPK2终极指南:如何轻松编辑《流放之路》游戏资源文件 【免费下载链接】VisualGGPK2 Library for Content.ggpk of PathOfExile (Rewrite of libggpk) 项目地址: https://gitcode.com/gh_mirrors/vi/VisualGGPK2 VisualGGPK2是一款专为《流放之路》玩家…...

qmcdump:三步解锁QQ音乐加密文件,让您的音乐收藏重获自由
qmcdump:三步解锁QQ音乐加密文件,让您的音乐收藏重获自由 【免费下载链接】qmcdump 一个简单的QQ音乐解码(qmcflac/qmc0/qmc3 转 flac/mp3),仅为个人学习参考用。 项目地址: https://gitcode.com/gh_mirrors/qm/qmcd…...

免费视频字幕提取终极指南:3分钟快速提取多语言硬字幕
免费视频字幕提取终极指南:3分钟快速提取多语言硬字幕 【免费下载链接】video-subtitle-extractor 视频硬字幕提取,生成srt文件。无需申请第三方API,本地实现文本识别。基于深度学习的视频字幕提取框架,包含字幕区域检测、字幕内容…...

R3nzSkin Failed to find pattern 根本原因与实战修复指南
1. 这不是“找不到特征码”的报错,而是皮肤加载器在向你发出求救信号“Failed to find pattern”——当你第一次在R3nzSkin控制台里看到这行红色报错时,大概率会本能地以为:“哦,又一个特征码匹配失败”,然后下意识去改…...

煎饼果仔 夏天妹妹 90 天 AI 变现落地计划
配套固化核心 Skills+ 标准化Workflow,分阶段落地,兼顾口碑与长效收益 一、阶段总规划 表格 周期 阶段核心目标 变现侧重 AI 能力沉淀 1-30 天 资产梳理 + 模型训练,搭建生产底座 现有商单 + 单片付费增收 风格 LoRA、声纹、剧本模型、素材资产库 31-60 天 AI 量产内容 + …...

Keras图像分类混淆矩阵实战:从原理到调优的完整指南
1. 项目概述:为什么我们需要为Keras图像生成器定制混淆矩阵?在深度学习图像分类项目的尾声,当你看着训练集上的准确率曲线一路高歌猛进,而验证集上的损失也平稳下降时,很容易产生一种“模型已成”的错觉。然而…...

DLSS Swapper终极指南:免费开源的DLSS文件智能管理工具
DLSS Swapper终极指南:免费开源的DLSS文件智能管理工具 【免费下载链接】dlss-swapper 项目地址: https://gitcode.com/GitHub_Trending/dl/dlss-swapper 你是否曾经遇到过这样的困扰:你心爱的游戏明明支持DLSS技术,但游戏自带的DLSS…...

从博弈论到可解释AI:Shapley值及其交互指数的原理与应用
1. 从博弈论到可解释AI:理解Shapley值的核心思想在机器学习模型日益复杂的今天,理解一个模型为何做出某个预测,其重要性不亚于模型本身的性能。想象一下,你训练了一个精准的房价预测模型,当它判断某套房子价值500万时&…...