【计算机视觉】24-Object Detection
文章目录
- 24-Object Detection
- 1. Introduction
- 2. Methods
- 2.1 Sliding Window
- 2.2 R-CNN: Region-Based CNN
- 2.3 Fast R-CNN
- 2.4 Faster R-CNN: Learnable Region Proposals
- 2.5 Results of objects detection
- 3. Summary
- Reference
24-Object Detection
1. Introduction
-
Task Definition
Input: Single RGB Image
Output: A set of detected objects;
For each object predict:
-
Category label (from fixed, known set of categories)
-
Bounding box(four numbers: x, y, width, height)
-
-
Challenges
- Multiple outputs: Need to output variable numbers of objects per image
- Multiple types of output: Need to predict ”what” (category label) as well as “where” (bounding box)
- Large images: Classification works at 224x224; need higher resolution for detection, often ~800x600
-
Detecting a single object
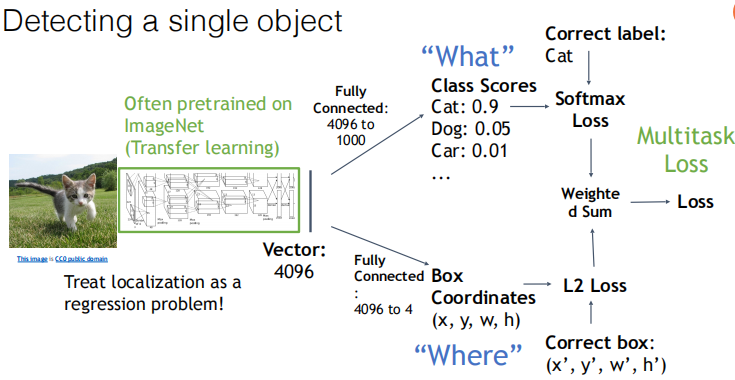
With two branches, outputting label, and box
Problem: Images can have more than one object! And if we use multiple single object detection, it will decrease the efficiency.
2. Methods
2.1 Sliding Window
Apply a CNN to many different crops of the image, CNN classifies each crop as an object or background:
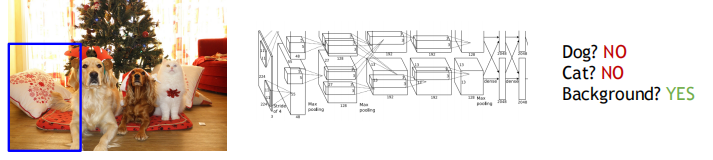
Problem: Need too many calculations
- Consider an image of size H*W and a box of size h*w
- Total possible boxes: ∑ h = 1 H ∑ w = 1 W ( W − w + 1 ) ( H − h + 1 ) = H ( H + 1 ) 2 W ( W + 1 ) 2 \sum_{h=1}^{H}\sum_{w=1}^{W}(W-w+1)(H-h+1)=\frac{H(H+1)}{2}\frac{W(W+1)}{2} ∑h=1H∑w=1W(W−w+1)(H−h+1)=2H(H+1)2W(W+1)
- 800 x 600 image has ~58M boxes! No way we can evaluate them all.
2.2 R-CNN: Region-Based CNN
-
Region Proposals(Selective Search)
Selective Search is a region proposal algorithm used in object detection. It is based on computing hierarchical grouping of similar regions based on color, texture, size and shape compatibility.
Selective Search starts by over-segmenting the image based on intensity of the pixels using a graph-based segmentation method by Felzenszwalb and Huttenlocher.
Selective Search algorithm takes these oversegments as initial input and performs the following steps
- Add all bounding boxes corresponding to segmented parts to the list of regional proposals
- Group adjacent segments based on similarity
- Go to step 1
At each iteration, larger segments are formed and added to the list of region proposals. Hence we create region proposals from smaller segments to larger segments in a bottom-up approach.
As for the calculation of similarity measures based on color, texture, size and shape compatibility, please refer to Selective Search for Object Detection (C++ / Python) | LearnOpenCV
-
Architecture of the network
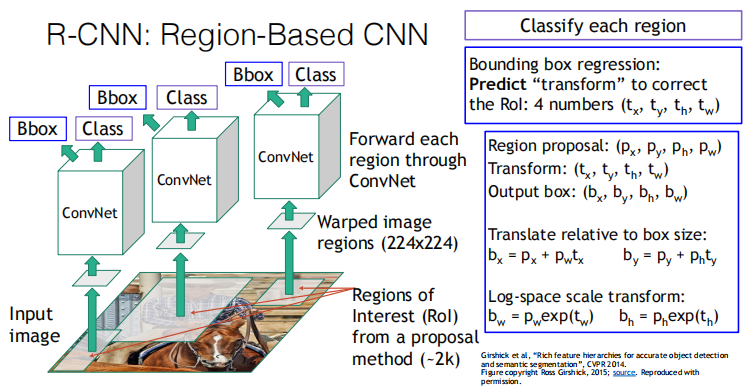
On two thousand selected regions, we narrow them down to the size required for classification, and after passing through the convolutional network, we output the category along with the box offset
-
Steps
- Run region proposal method to compute ~2000 region proposals
- Resize each region to 224x224 and run independently through CNN to predict class scores and bbox transform
- Use scores to select a subset of region proposals to output (Many choices here: threshold on background, or per-category? Or take top K proposals per image?)
- Compare with ground-truth boxes
-
Details(Focus on step3 and 4)
-
Intersection over Union (IoU)
I o U = Area of Intersection Area of Union IoU=\frac{\color{yellow}{\text{Area of Intersection}}}{\color{purple}{\text{Area of Union}}} IoU=Area of UnionArea of Intersection

-
Non-Max Suppression (NMS)
-
Select next highest-scoring box
-
Eliminate lower-scoring boxes(Comparing the highest-scoring box to all the others ) with IoU > threshold (e.g. 0.7)
-
If any boxes remain, GOTO 1
Problem: NMS may eliminate ”good” boxes when objects are highly overlapping:
-
-

-
Mean Average Precision (mAP)

Use the gif to understand it(but I only have the final image):
 For example, the mAP in COCO dataset is 0.4.
For example, the mAP in COCO dataset is 0.4.
-
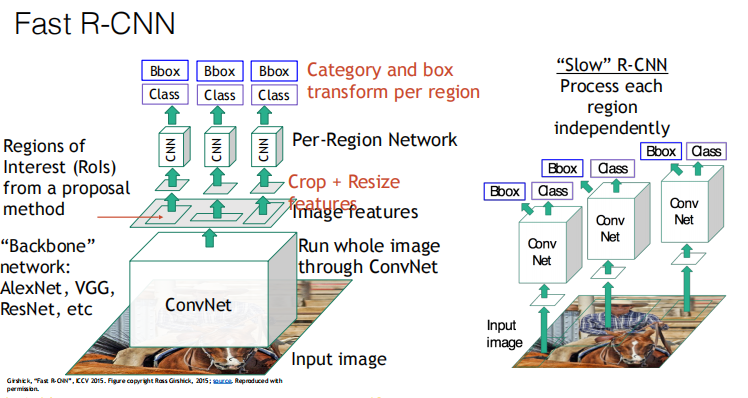
Problem: Very slow! Need to do ~2k forward passes for each image!
Solution: Run CNN before warping!
2.3 Fast R-CNN
-
Architecture:
-
Most of the computation happens in the backbone network; this saves work for overlapping region proposals
-
Per-Region network is relatively lightweight
-
-
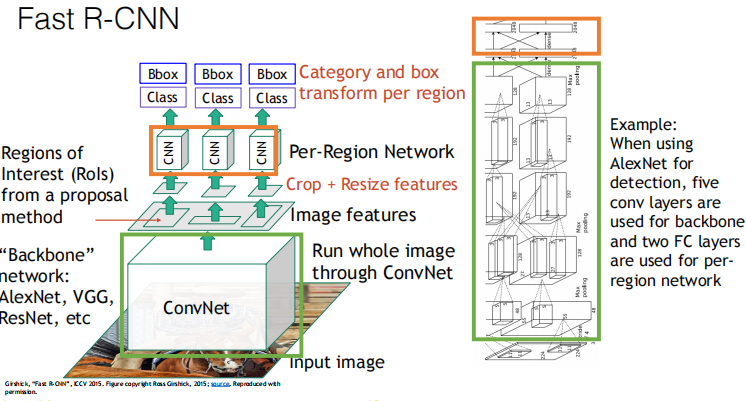
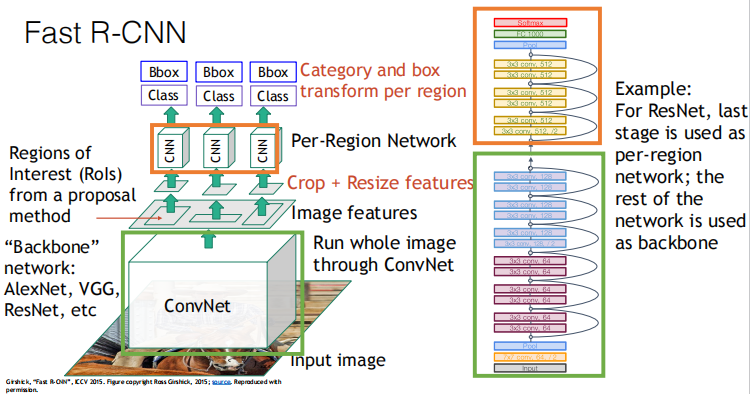
The concrete architecture in Alexnet and Resnet:
-
Details:
How to crop features?
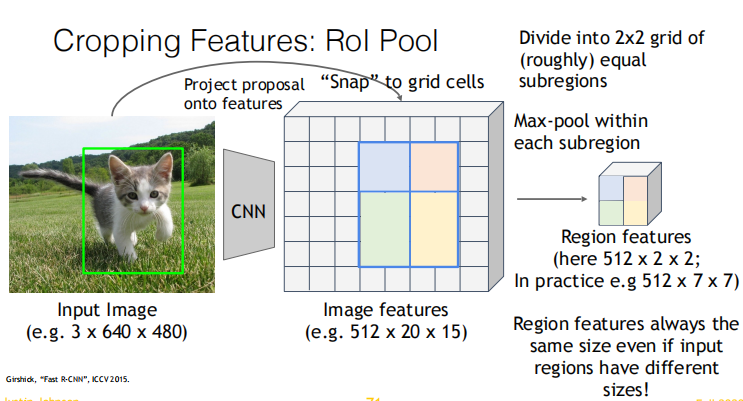
In this process, there are two errors:

如下图,假设输入图像经过一系列卷积层下采样32倍后输出的特征图大小为8x8,现有一 RoI 的左上角和右下角坐标(x, y 形式)分别为(0, 100) 和 (198, 224),映射至特征图上后坐标变为(0, 100 / 32)和(198 / 32,224 / 32),由于像素点是离散的,因此向下取整后最终坐标为(0, 3)和(6, 7),这里产生了第一次量化误差。
假设最终需要将 RoI 变为固定的2x2大小,那么将 RoI 平均划分为2x2个区域,每个区域长宽分别为 (6 - 0 + 1) / 2 和 (7 - 3 + 1) / 2 即 3.5 和 2.5,同样,由于像素点是离散的,因此有些区域的长取3,另一些取4,而有些区域的宽取2,另一些取3,这里产生了第二次量化误差。
-
RoI Align in Mask R-CNN

Notice: RoI Align needs to set a hyperparameter to represent the number of sampling points in each region, which is usually 4.
-
Speed

It has an enormous increase from R-CNN. But we can find that region proposals costs lots of time.
2.4 Faster R-CNN: Learnable Region Proposals
-
Architecture:
Insert Region Proposal Network (RPN) to predict proposals from feature

-
Details:
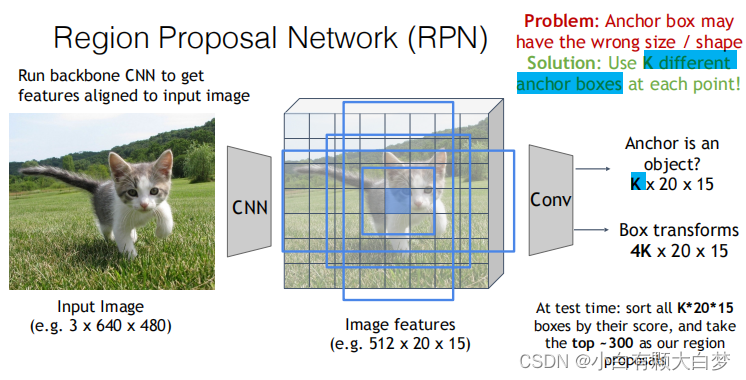
At each point, predict whether the corresponding anchor contains an object. And we use logistic regression to express the error. predict scores with conv layer
- Evaluation

-
Improvement
Faster R-CNN is a Two-stage object detector:

But we want to design the structure of end to end, eliminating the second stage. So we change the function of region proposal network to predict the class label.

2.5 Results of objects detection

- Two-stage method (Faster R-CNN) gets the best accuracy but are slower.
- Single-stage methods (SSD) are much faster but don’t perform as well
- Bigger backbones improve performance, but are slower
- Diminishing returns for slower methods

These results are a few years old …since then GPUs have gotten faster, and we’ve improved performance with many tricks:
- Train longer!
- Multiscale backbone: Feature
Pyramid Networks - Better backbone: ResNeXt
- Single-Stage methods have improved
- Very big models work better
- Test-time augmentation pushes
numbers up - Big ensembles, more data, etc
3. Summary

Reference
[1] RoI Pooling 系列方法介绍(文末附源码) - 知乎 (zhihu.com)
[2] Selective Search for Object Detection (C++ / Python) | LearnOpenCV
相关文章:
【计算机视觉】24-Object Detection
文章目录 24-Object Detection1. Introduction2. Methods2.1 Sliding Window2.2 R-CNN: Region-Based CNN2.3 Fast R-CNN2.4 Faster R-CNN: Learnable Region Proposals2.5 Results of objects detection 3. SummaryReference 24-Object Detection 1. Introduction Task Defin…...

【mac 解决eclipse意外退出】
打开eclipse时提示报错信息应用程序"Eclipse.app"无法打开(这里忘了截图就不上图了)。 点击 “好” 的按钮后会弹出发送报告的弹窗 终端输入:sudo codesign --force --deep --sign - /Applications/Eclipse.app/ 就可以解决了...

mysql innodb buffer pool缓冲池命中率和命中了哪些表?—— 筑梦之路
环境说明 mysql 5.7及以上 公式 # InnoDB缓冲区缓存的命中率计算公式100 * (1 - (innodb_buffer_pool_reads/innodb_buffer_pool_read_requests ))注意: 对于具有大型缓冲池的系统,既要关注该比率,也要关注OS页面读写速率的变化可以更好地跟踪差异。s…...
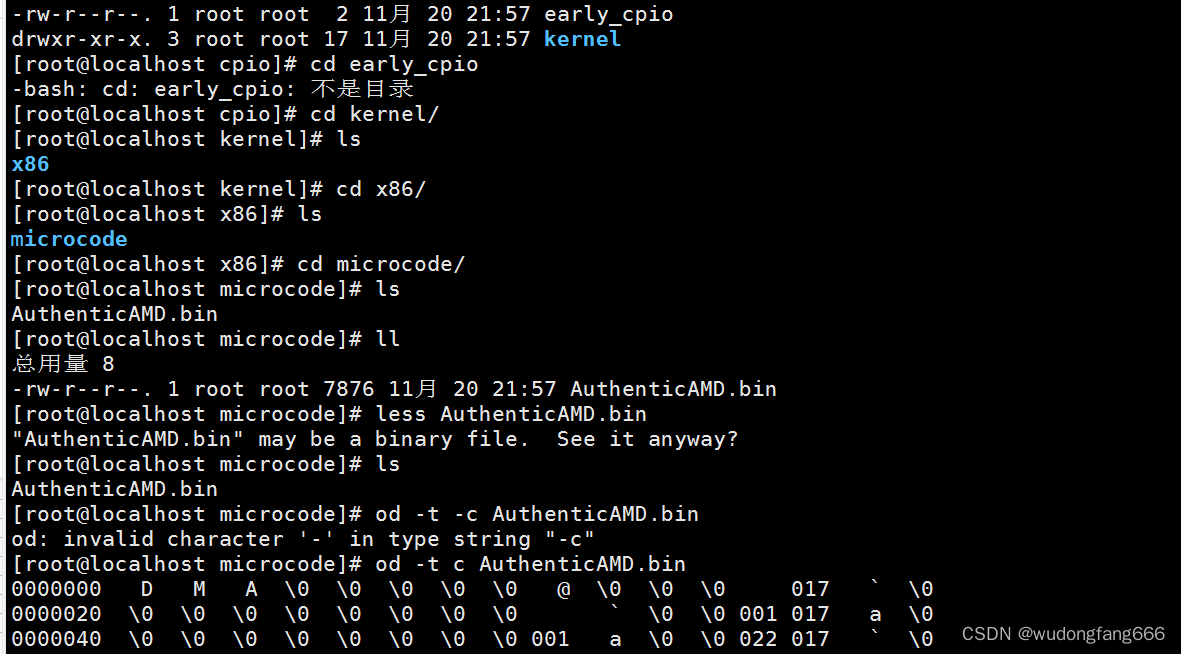
牛掰的dd命令,cpi0配合find备份(不会主动备份),od查看
dd if设备1或文件 of设备2或文件 blocknsize countn 还原就是把设备1,2调过来 这里想到dump的还原是命令restore,想起来就写一下,省的总忘记 可以针对整块磁盘进行复制,对于新创建的分区,也不用格式化,可以直接…...

pip list 和 conda list的区别
PS : 网上说conda activate了之后就可以随意pip了 可以conda和pip混用 但是安全起见还是尽量用pip 这样就算activate了,进入base虚拟环境了 conda与pip的区别 来源 Conda和pip通常被认为几乎完全相同。虽然这两个工具的某些功能重叠,但它们设计用于不…...
多目标应用:基于多目标灰狼优化算法MOGWO求解微电网多目标优化调度(MATLAB代码)
一、微网系统运行优化模型 微电网优化模型介绍: 微电网多目标优化调度模型简介_IT猿手的博客-CSDN博客 二、多目标灰狼优化算法MOGWO 多目标灰狼优化算法MOGWO简介: 三、多目标灰狼优化算法MOGWO求解微电网多目标优化调度 (1)…...
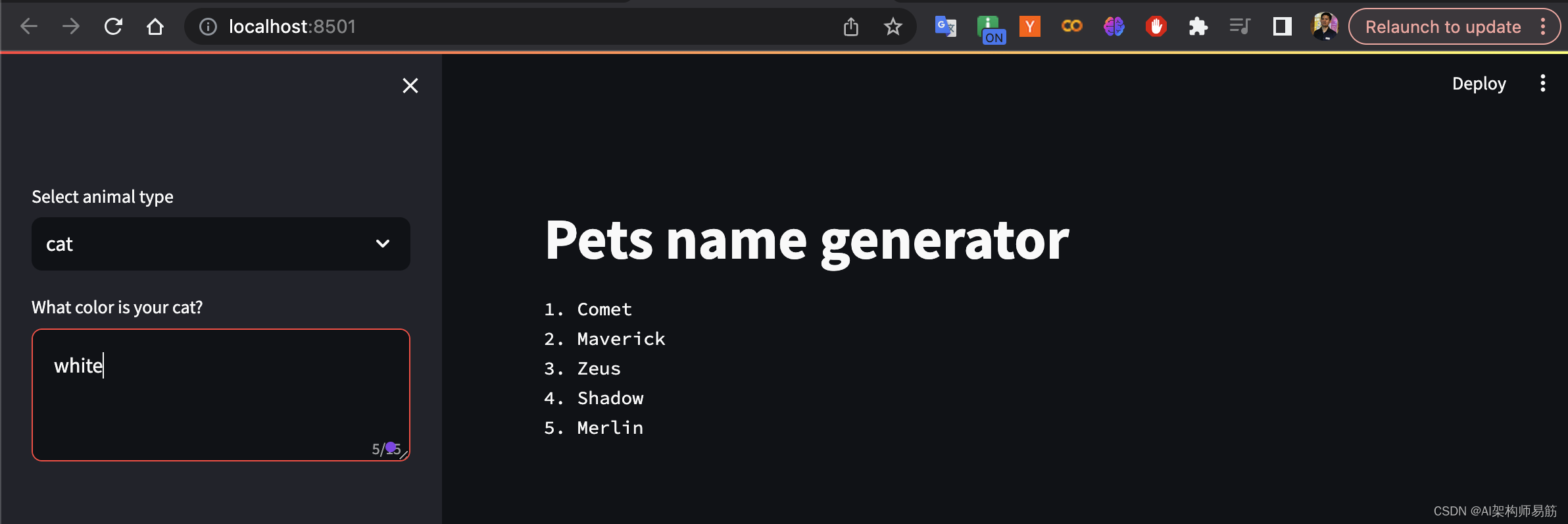
LangChain 2模块化prompt template并用streamlit生成网站 实现给动物取名字
上一节实现了 LangChain 实现给动物取名字, 实际上每次给不同的动物取名字,还得修改源代码,这周就用模块化template来实现。 1. 添加promptTemplate from langchain.llms import OpenAI # 导入Langchain库中的OpenAI模块 from langchain.p…...

linux nas
挂载到本地 mkdir -p /mnt/mountnasdir mount -t nfs 192.168.62:/cnas_id10086_vol10010_dev/ /mnt/mountnasdir...

控制您的音乐、视频等媒体内容
跨多个 Chrome 标签页播放音乐或声音 在计算机上打开 Chrome 。在标签页中播放音乐、视频或其他任何有声内容。您可以停留在该标签页上,也可以转到别处。要控制声音,请在右上角点击“媒体控件”图标 。您可暂停播放、转到下一首歌曲/下一个视频…...
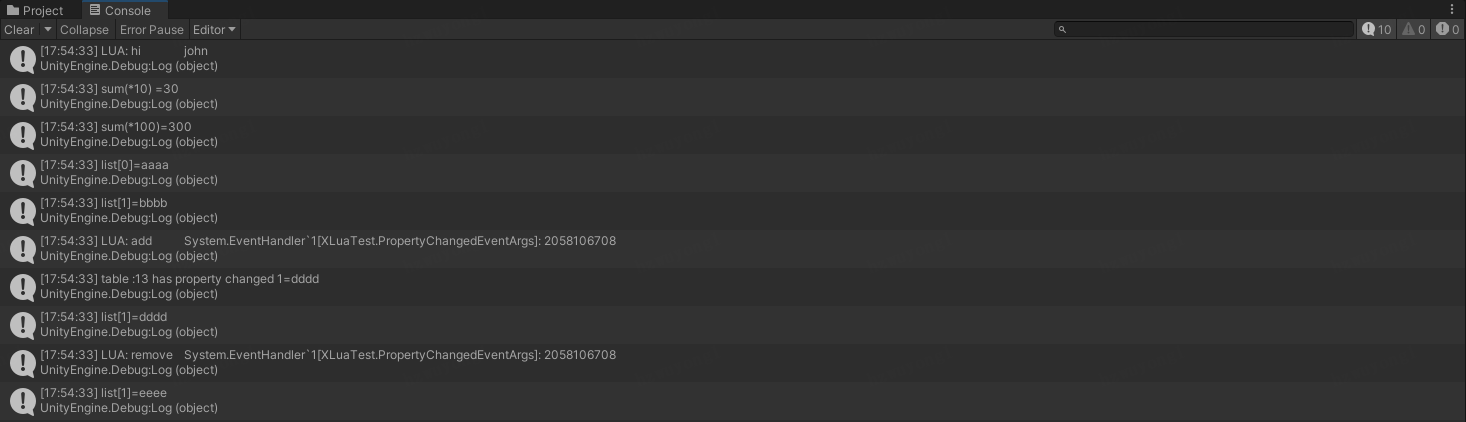
xlua源码分析(三)C#访问lua的映射
xlua源码分析(三)C#访问lua的映射 上一节我们主要分析了lua call C#的无wrap实现。同时我们在第一节里提到过,C#使用LuaTable类持有lua层的table,以及使用Action委托持有lua层的function。而在xlua的官方文档中,推荐使…...

2023 极术通讯-汽车“新四化”路上,需要一片安全山海
导读:极术社区推出极术通讯,引入行业媒体和技术社区、咨询机构优质内容,定期分享产业技术趋势与市场应用热点。 芯方向 【Armv9】-动态TrustZone技术的介绍 动态 TrustZone 是提供多租户安全媒体 pipeline 的绝佳工具。完全不受操作系统、虚…...

Spring Boot接口设计规范
接口参数处理及统一结果响应 1、接口参数处理 1、普通参数接收 这种参数接收方式是比较常见的,由于是GET请求方式,所以在传参时直接在路径后拼接参数和参数值即可。 例如:localhost:8080/api/product/list?key1value1&key2value2 /…...

美创科技与南京大数据安全技术有限公司达成战略合作
近日,美创科技与南京大数据安全技术有限公司正式签署战略合作协议,优势力量共享、共拓共创共赢。 美创科技CEO柳遵梁、副总裁罗亮亮、副总裁王利强,南京大数据安全技术有限公司总经理潘杰、市场总监刘莉莎、销售总监王皓月、技术总监薛松等出…...

2.4路由日志管理
2.4路由/日志管理 一、静态路由和动态路由 路由器在转发数据时,需要现在路由表中查找相应的路由,有三种途径 (1)直连路由:路由器自动添加和自己直连的路由 (2)静态路由:管理员手动…...

归并排序详解:递归实现+非递归实现(图文详解+代码)
文章目录 归并排序1.递归实现2.非递归实现3.海量数据的排序问题 归并排序 时间复杂度:O ( N * logzN ) 每一层都是N,有log2N层空间复杂度:O(N),每个区间都会申请内存,最后申请的数组大小和array大小相同稳定…...
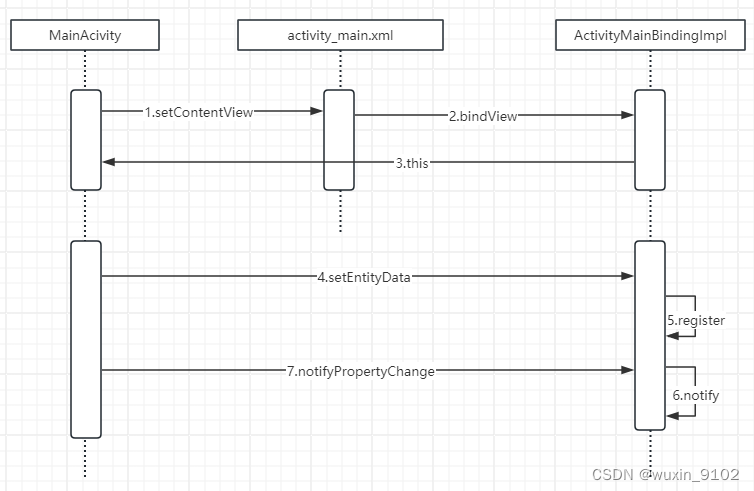
DataBinding原理
1、MainActivity首先使用DataBindingUtil.setContentView设置布局文件activity_main.xml。 2、随后,经过一系列函数调用,ActivityMainBindingImpl对象最终会实例化,并与activity_main.xml进行绑定。 3、实例化后的ActivityMainBindingImpl对象…...
docker更换国内源
docker更换国内源 1、编辑Docker配置文件 在终端中执行以下命令,编辑Docker配置文件: vi /etc/docker/daemon.json2、添加更新源 在打开的配置文件中,添加以下内容: {"registry-mirrors": ["https://hub-mirror…...
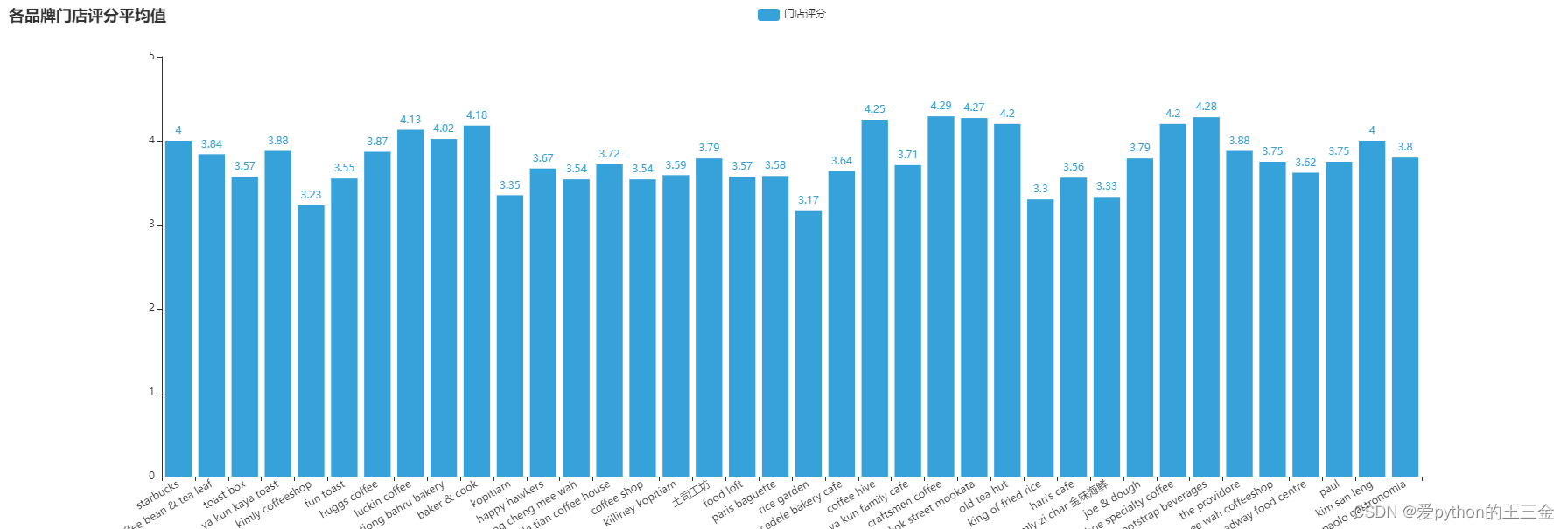
【咖啡品牌分析】Google Maps数据采集咖啡市场数据分析区域分析热度分布分析数据抓取瑞幸星巴克
引言 咖啡作为一种受欢迎的饮品,已经成为我们生活中不可或缺的一部分。随着国内外咖啡品牌的涌入,新加坡咖啡市场愈加多元化和竞争激烈。 本文对新加坡咖啡市场进行了全面的品牌门店数占比分析,聚焦于热门品牌的地理分布、投资价值等。通过…...
【Java】异常处理(一)
🌺个人主页:Dawn黎明开始 🎀系列专栏:Java ⭐每日一句:什么都不做,才会来不及 📢欢迎大家:关注🔍点赞👍评论📝收藏⭐️ 文章目录 📋前…...
【高级程序设计】Week2-4Week3-1 JavaScript
一、Javascript 1. What is JS 定义A scripting language used for client-side web development.作用 an implementation of the ECMAScript standard defines the syntax/characteristics of the language and a basic set of commonly used objects such as Number, Date …...

2026论文写作工具红黑榜:一键生成论文工具怎么选?一篇讲透:
2026年论文写作工具红黑榜出炉,红榜优先选千笔AI、ThouPen、豆包,适配国内学术规范;黑榜避开低质免费工具、无真实引用平台、过度依赖全文生成的工具。选择时建议按需求匹配三维模型:需求匹配度 - 数据可信度 - 成本承受力。一、红…...

STM32F103C6T6模拟SPI驱动ADS1220:从硬件连接到代码调试的完整避坑指南
STM32F103C6T6模拟SPI驱动ADS1220:从硬件连接到代码调试的完整避坑指南 在嵌入式开发领域,高精度数据采集一直是工程师们面临的挑战之一。TI公司的ADS1220作为一款24位Δ-Σ模数转换器,以其出色的噪声性能和灵活的配置选项,成为许…...
)
校园便利|基于java+vue的校园便利平台(源码+数据库+文档)
校园便利平台 基于SprinBootvue的校园便利平台 一、前言 二、系统设计 三、系统功能设计 系统前台实现 系统首页功能 用户后台管理功能 管理员功能实现 四、数据库设计 五、核心代码 六、论文参考 七、最新计算机毕设选题推荐 八、源码获取: 博主介绍…...

Layerdivider:AI智能分层工具完整指南 - 快速将单张图片转为分层PSD
Layerdivider:AI智能分层工具完整指南 - 快速将单张图片转为分层PSD 【免费下载链接】layerdivider A tool to divide a single illustration into a layered structure. 项目地址: https://gitcode.com/gh_mirrors/la/layerdivider Layerdivider是一个革命性…...

VisualTFT自定义圆形进度条:Canvas绘图与嵌入式GUI开发实践
1. 项目概述与核心价值最近在做一个工业HMI的项目,客户要求在设备启动自检的界面上,用一个圆环形的进度条来展示自检进度,而不是传统的长条状进度条。他们觉得圆环看起来更“高级”,也更符合他们产品的整体UI风格。接到这个需求&a…...

嵌入式开发为何首选C语言?深入解析其核心优势与实战应用
1. 项目概述:嵌入式世界的“通用语”如果你刚踏入嵌入式开发的大门,或者正从其他编程领域转过来,可能会有一个疑问:为什么满世界都在用C语言?从你手上那块小小的单片机,到家里的智能路由器,再到…...

龙芯LS2K PMON启动全景:从mainbus到U盘识别
【龙芯LS2K PMON终极干货】整机设备启动全景图:从 mainbus 开机到 U 盘识别全流程 大家好,本篇是PMON/BSD内核设备模型大结局。 我将把你所有文件: mainbus、localbus、pci、pcibr、pcilotg、lotg、dwc2、usb、ioconf.c、cfdata 全部串成一张从开机上电到U盘识别的终极全景…...

如何快速安装elan:Lean版本管理器的完整指南
如何快速安装elan:Lean版本管理器的完整指南 【免费下载链接】elan The Lean version manager 项目地址: https://gitcode.com/gh_mirrors/el/elan elan是一个专门为Lean定理证明器设计的版本管理工具,它能让你轻松管理多个Lean安装版本。无论你是…...
)
告别串口助手:用Python脚本实现YMODEM协议自动升级嵌入式固件(附源码)
告别串口助手:用Python脚本实现YMODEM协议自动升级嵌入式固件(附源码) 在嵌入式设备量产测试和远程维护场景中,传统的手动串口工具操作已成为效率瓶颈。每次固件升级都需要人工介入,不仅耗时费力,还容易因…...

如何在浏览器中零安装查看SQLite数据库?完全指南
如何在浏览器中零安装查看SQLite数据库?完全指南 【免费下载链接】sqlite-viewer View SQLite file online 项目地址: https://gitcode.com/gh_mirrors/sq/sqlite-viewer 你是否曾遇到过这样的情况:收到一个SQLite数据库文件需要快速查看…...