【古月居《ros入门21讲》学习笔记】14_参数的使用与编程方法
目录
说明:
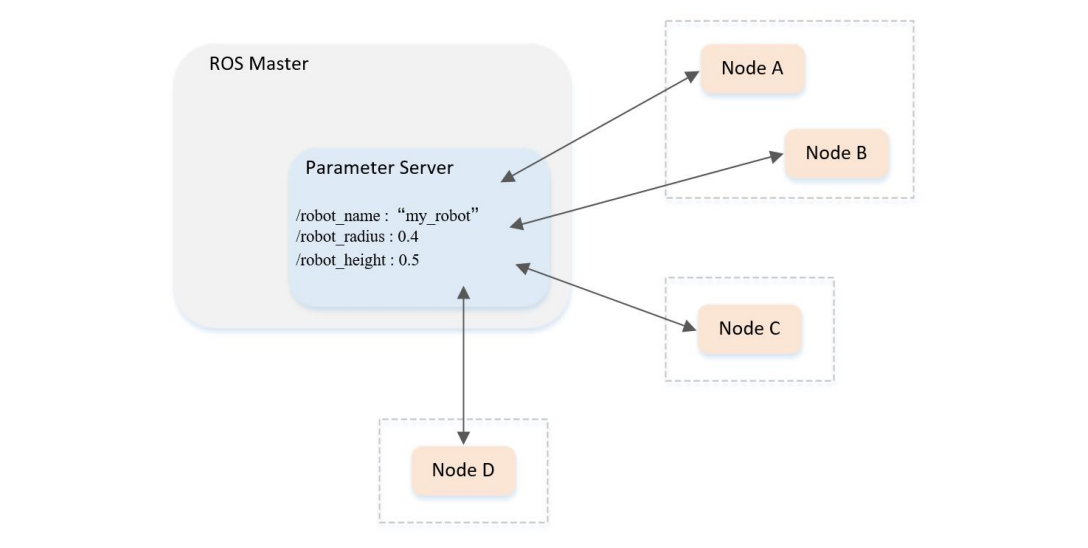
1. 参数模型(全局字典)
2. 实现过程(C++)
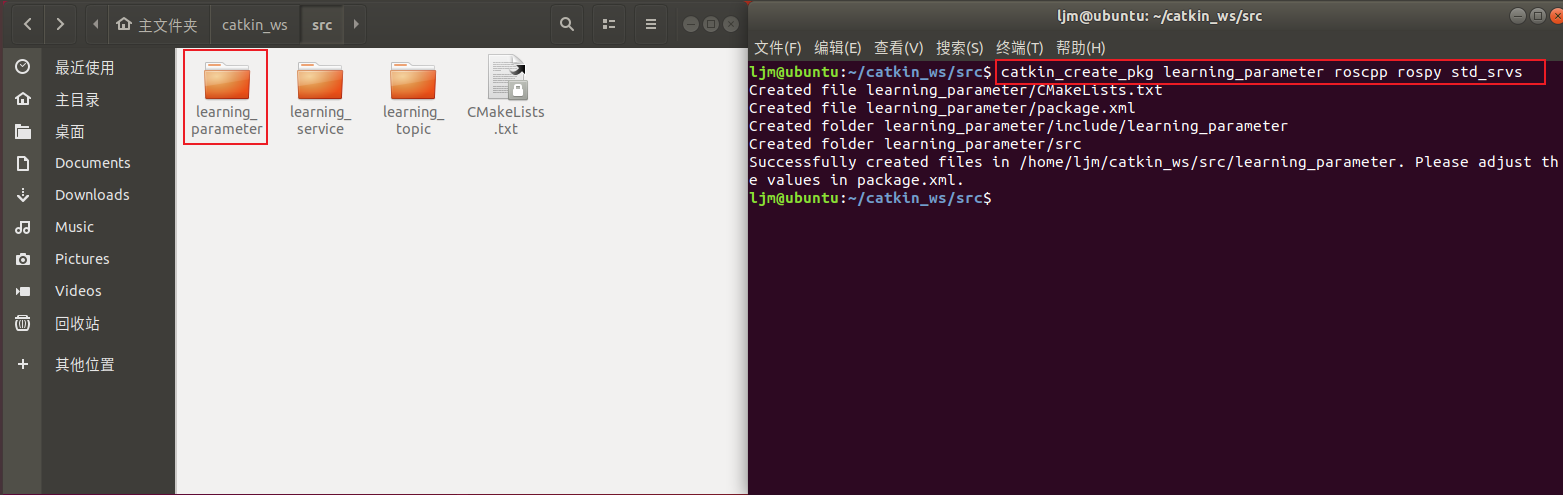
创建功能包
参数命令行的使用
YAML参数文件
rosparam命令
使用示例
编程方法(C++)
配置代码编译规则
编译并运行
编译
运行
3. 实现过程(Python)
编程方法(Python)
运行效果
说明:
1. 本系列学习笔记基于B站:古月居《ROS入门21讲》课程,且使用的Ubuntu与ROS系统版本与课程完全一致;
| 虚拟机版本 | Linux系统版本 | ROS系统版本 |
|---|---|---|
| VMware WorkStation Pro 16 | Ubuntu18.04 | Melodic |
2. 课程中的所有示例代码均已跑通,且对Pyhon版本的代码也都做了运行验证,并附带验证过程(错误均已修正);
3. 本节是整个笔记的第14节,对应视频课程的第16节,请自行对应学习;
4. 整个系列笔记基本已经完结,但部分章节仍需润色修改 ,后面会陆续发布,请大家持续关注, 创作不易,感谢支持!
1. 参数模型(全局字典)
2. 实现过程(C++)
创建功能包
cd ~/catkin_ws/src catkin_create_pkg learning_parameter roscpp rospy std_srvs
参数命令行的使用
YAML参数文件
rosparam命令
-
列出当前所有参数
rosparam list
-
显示某个参数值
rosparam get param_key
-
设置某个参数值
rosparam set param_key param_value
-
保存参数到文件
rosparam dump file_name
-
从文件读取参数
rosparam load file_name
-
删除参数
rosparam delete param_key
使用示例
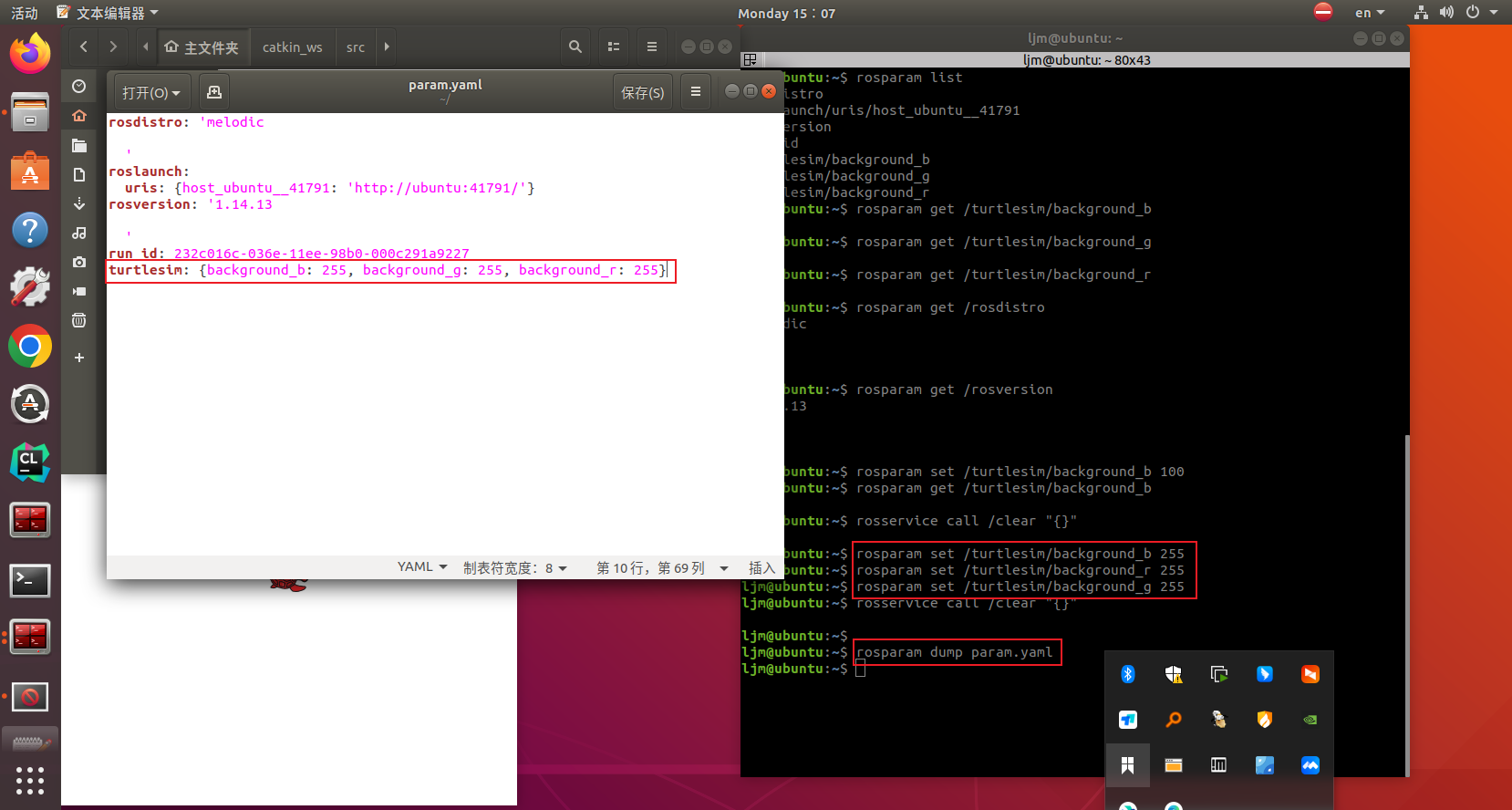
显示与设置某个参数
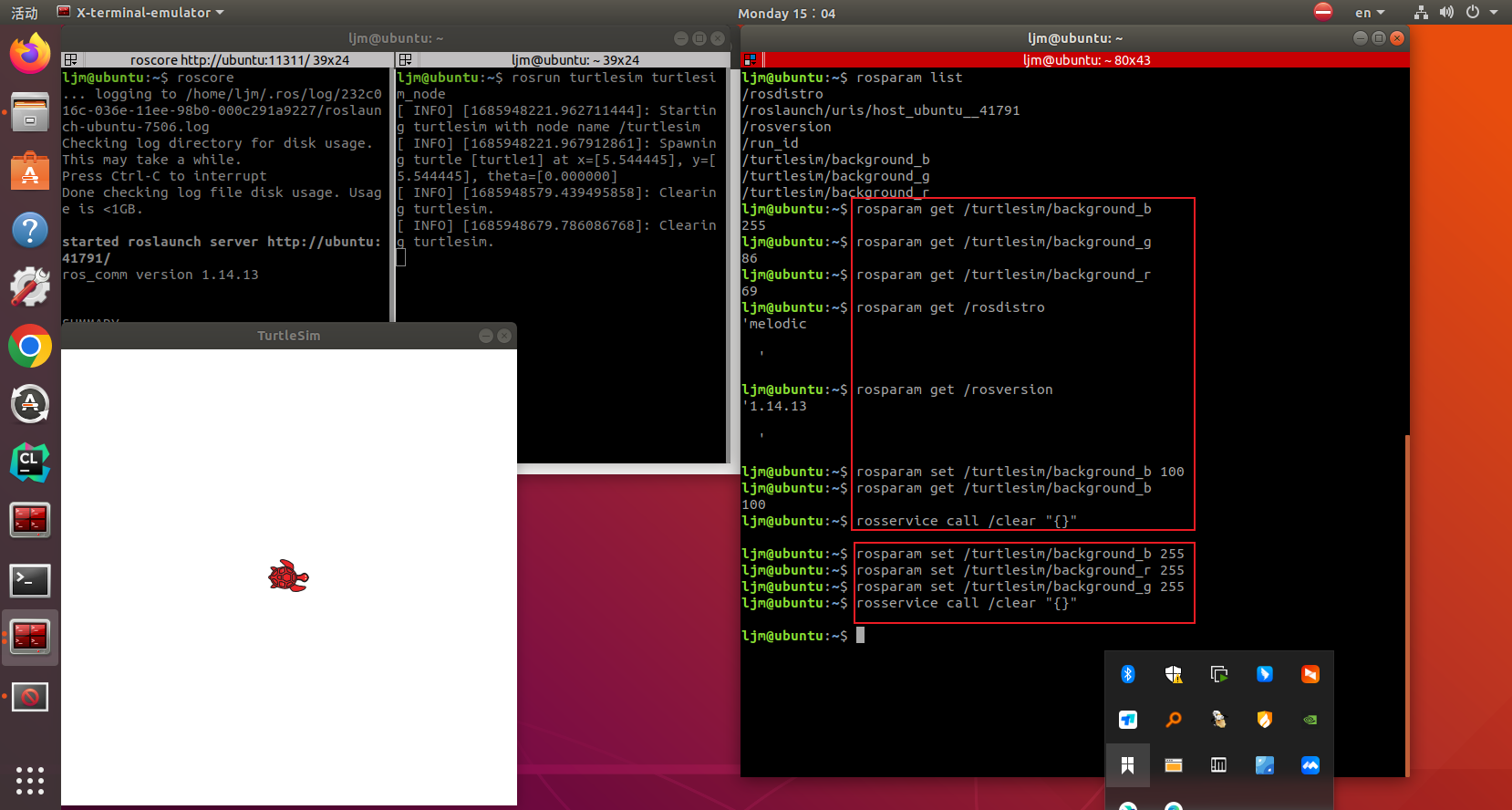
保存当前参数到某个文件(文件路径就在当前终端的工作路径)
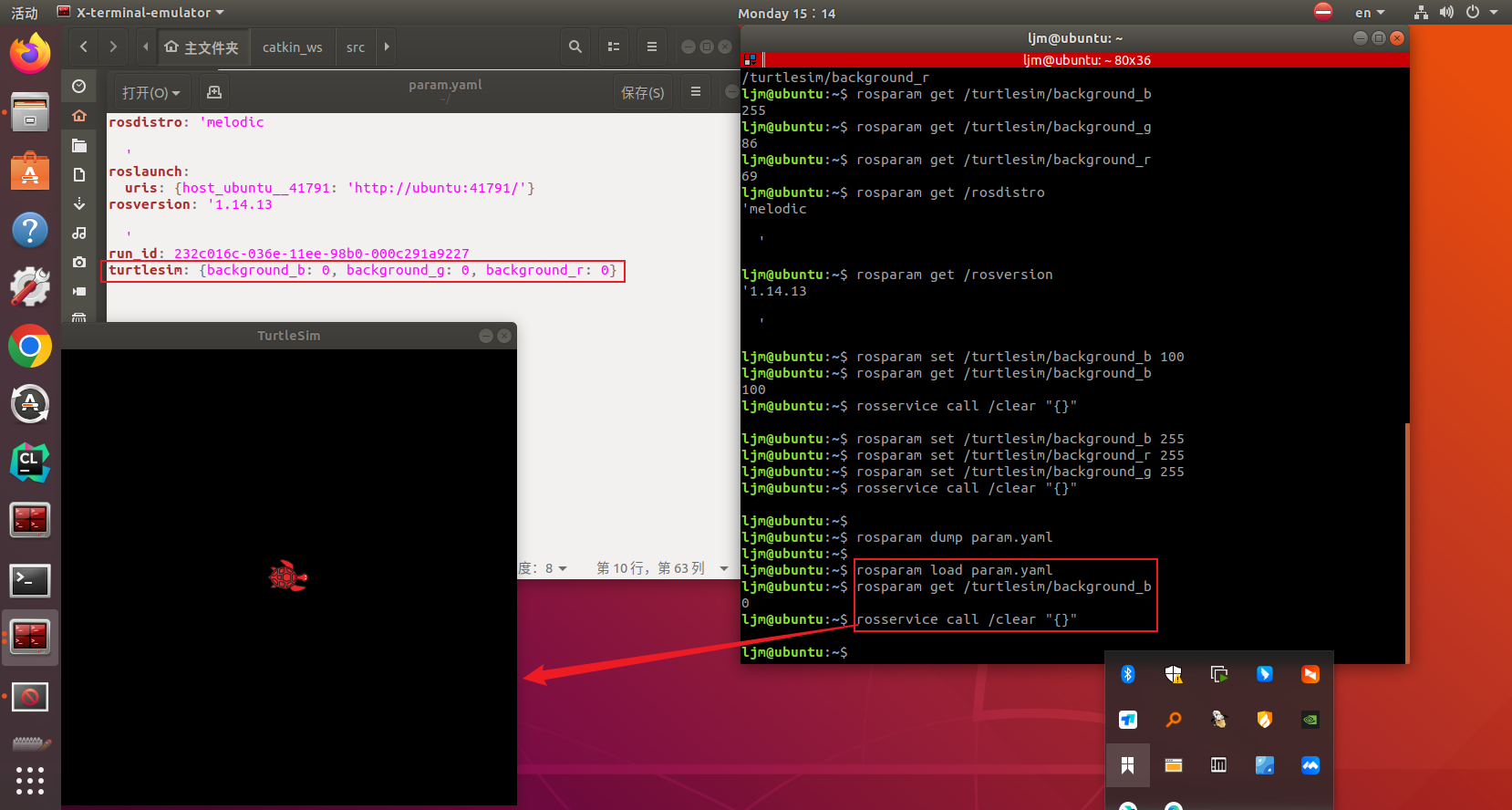
从文件中修改并读取参数
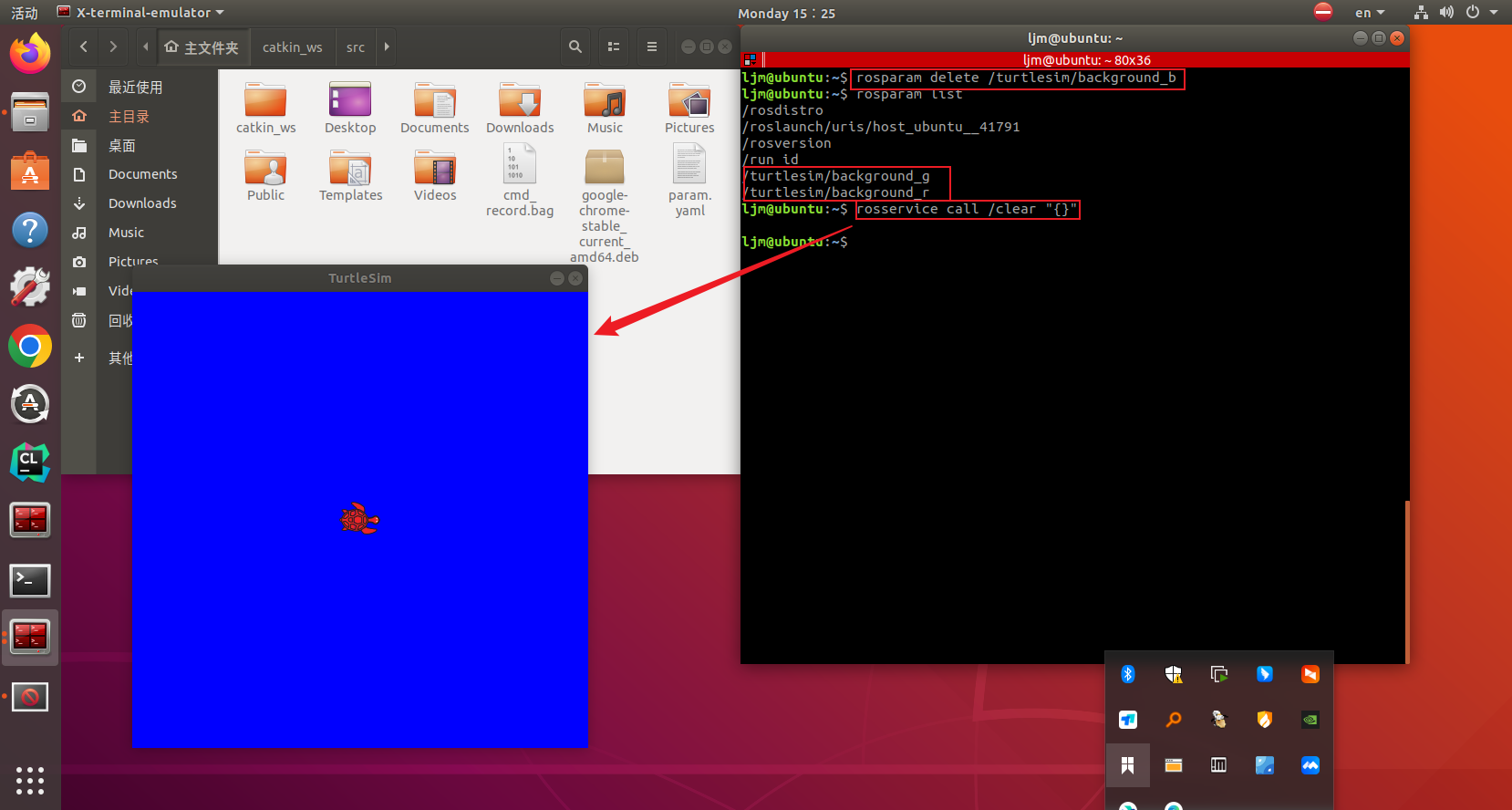
删除某个参数
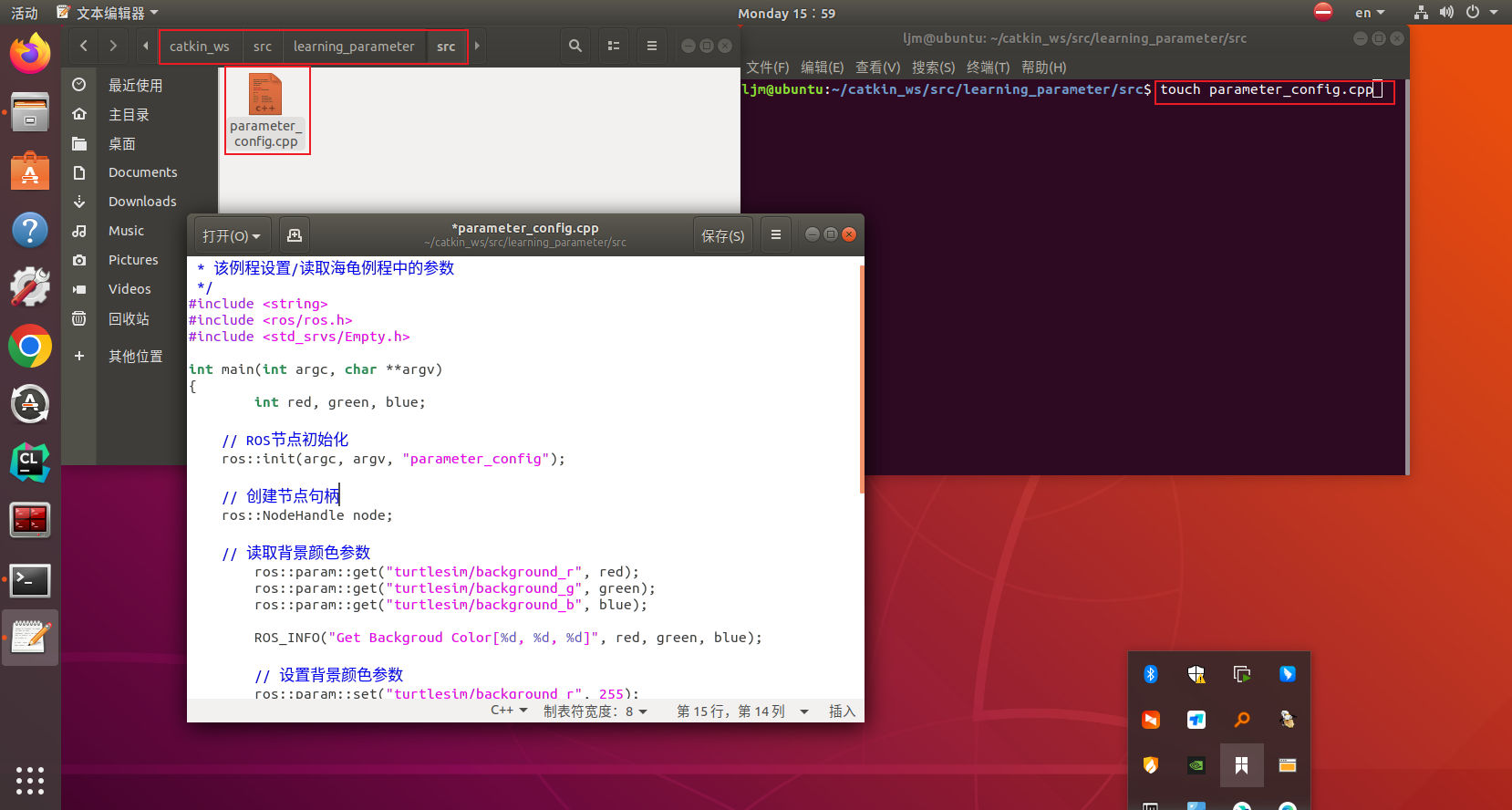
编程方法(C++)
cd ~/catkin_ws/src/learning_parameter/src touch parameter_config.cpp
-
初始化ROS节点;
-
get函数获取参数;
-
set函数设置参数
/*** 该例程设置/读取海龟例程中的参数*/
#include <string>
#include <ros/ros.h>
#include <std_srvs/Empty.h>
int main(int argc, char **argv)
{int red, green, blue;
// ROS节点初始化ros::init(argc, argv, "parameter_config");
// 创建节点句柄ros::NodeHandle node;
// 读取背景颜色参数ros::param::get("turtlesim/background_r", red);ros::param::get("turtlesim/background_g", green);ros::param::get("turtlesim/background_b", blue);
ROS_INFO("Get Backgroud Color[%d, %d, %d]", red, green, blue);
// 设置背景颜色参数ros::param::set("turtlesim/background_r", 255);ros::param::set("turtlesim/background_g", 255);ros::param::set("/background_b", 255);
ROS_INFO("Set Backgroud Color[255, 255, 255]");
// 读取背景颜色参数ros::param::get("turtlesim/background_r", red);ros::param::get("turtlesim/background_g", green);ros::param::get("turtlesim/background_b", blue);
ROS_INFO("Re-get Backgroud Color[%d, %d, %d]", red, green, blue);
// 调用服务,刷新背景颜色ros::service::waitForService("/clear");ros::ServiceClient clear_background = node.serviceClient<std_srvs::Empty>("/clear");std_srvs::Empty srv;clear_background.call(srv);sleep(1);
return 0;
}
配置代码编译规则
add_executable(parameter_config src/parameter_config.cpp)
target_link_libraries(parameter_config ${catkin_LIBRARIES})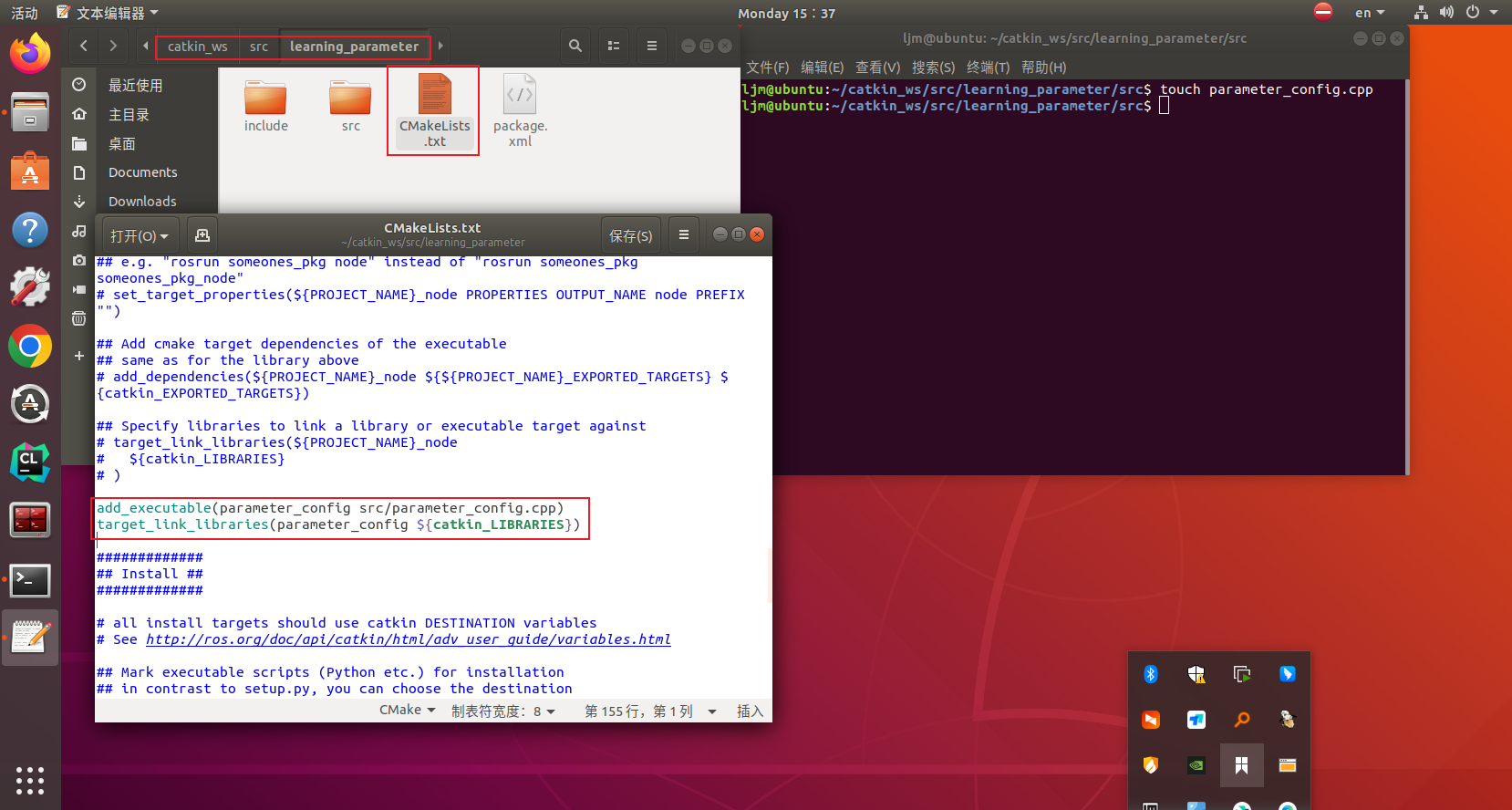
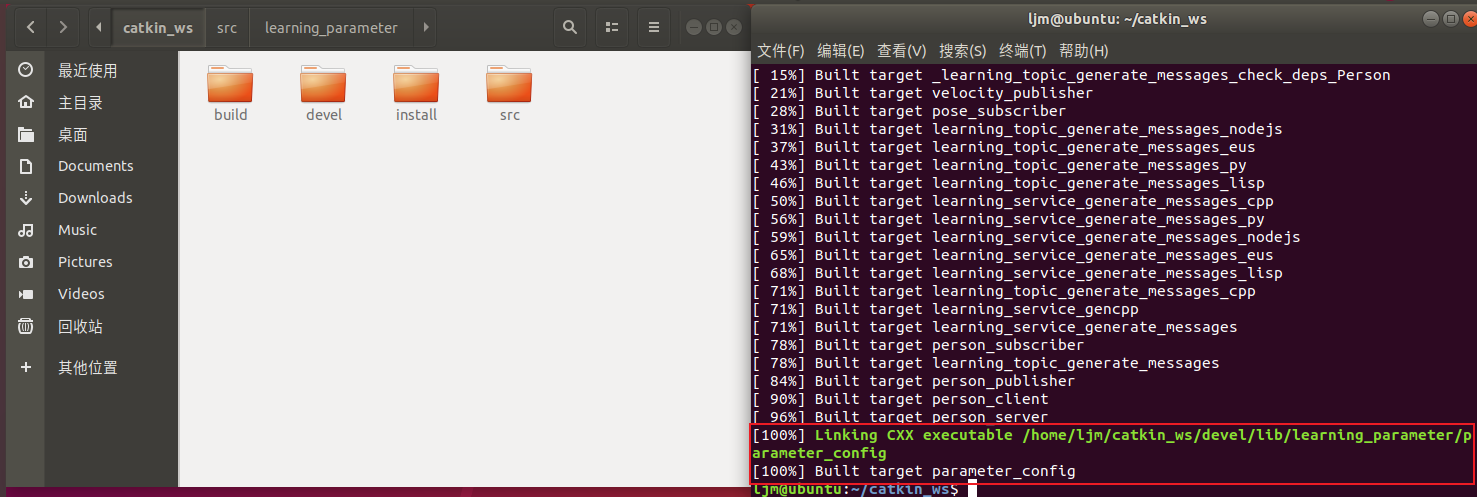
编译并运行
编译
cd ~/catkin_ws catkin_make source devel/setup.bash(如已配置 **.bashrc**文件,则此步不需要,配置方法在publisher的章节里)
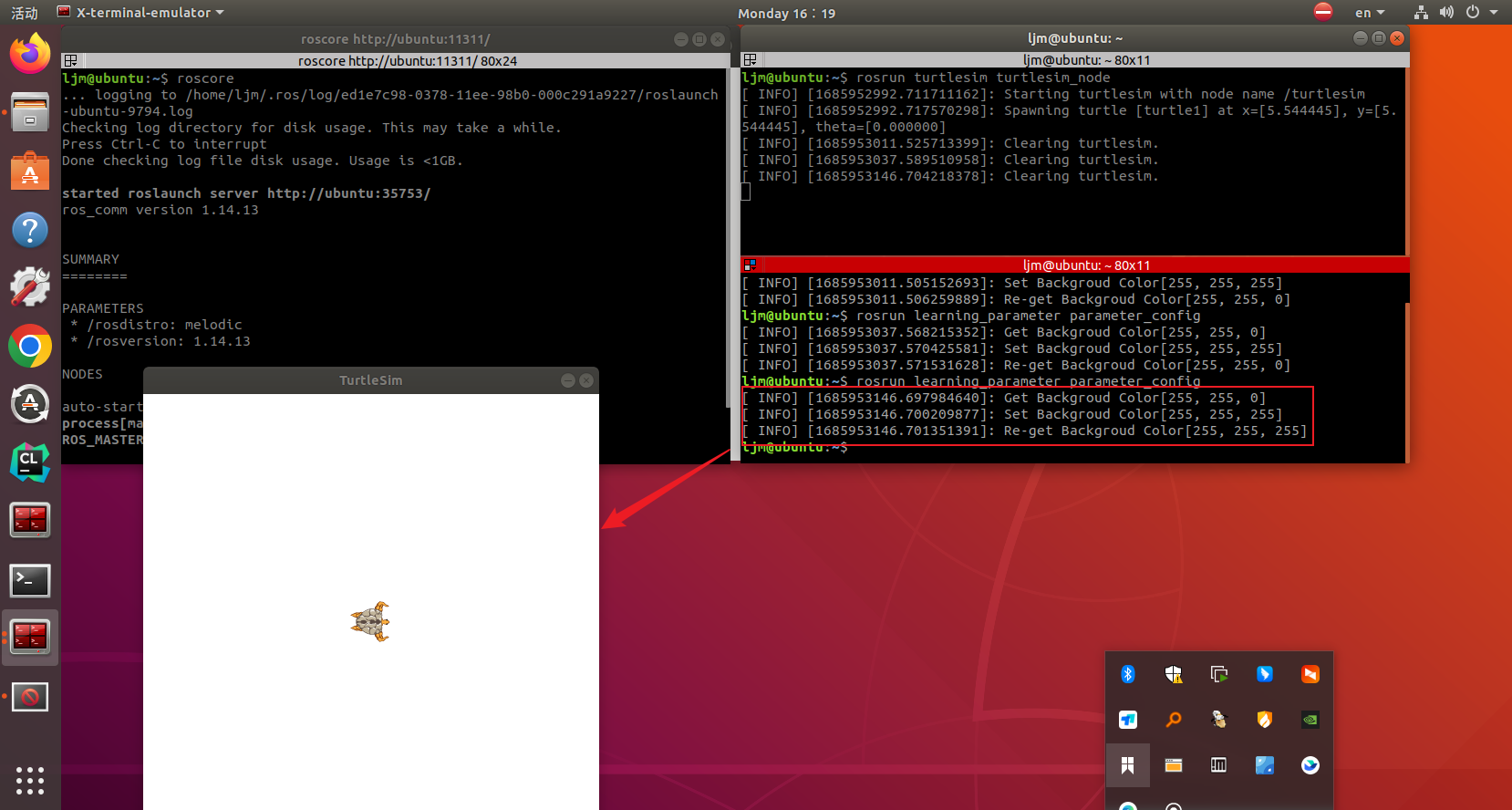
运行
roscore rosrun turtlesim turtlesim_node rosrun learning_parameter parameter_config
3. 实现过程(Python)
编程方法(Python)
cd ~/catkin_ws/src/learning_parameter mkdir scripts cd scripts touch parameter_config.py
#!/usr/bin/env python
# -*- coding: utf-8 -*-
# 该例程设置/读取海龟例程中的参数
import sys
import rospy
from std_srvs.srv import Empty
def parameter_config():# ROS节点初始化rospy.init_node('parameter_config', anonymous=True)
# 读取背景颜色参数red = rospy.get_param('turtlesim/background_r')green = rospy.get_param('turtlesim/background_g')blue = rospy.get_param('turtlesim/background_b')
rospy.loginfo("Get Backgroud Color[%d, %d, %d]", red, green, blue)
# 设置背景颜色参数rospy.set_param("turtlesim/background_r", 255);rospy.set_param("turtlesim/background_g", 255);rospy.set_param("turtlesim/background_b", 100);
rospy.loginfo("Set Backgroud Color[255, 255, 100]");
# 读取背景颜色参数red = rospy.get_param('turtlesim/background_r')green = rospy.get_param('turtlesim/background_g')blue = rospy.get_param('turtlesim/background_b')
rospy.loginfo("Get Backgroud Color[%d, %d, %d]", red, green, blue)
# 发现/spawn服务后,创建一个服务客户端,连接名为/spawn的servicerospy.wait_for_service('/clear')try:clear_background = rospy.ServiceProxy('/clear', Empty)
# 请求服务调用,输入请求数据response = clear_background()return responseexcept rospy.ServiceException, e:print "Service call failed: %s"%e
if __name__ == "__main__":parameter_config()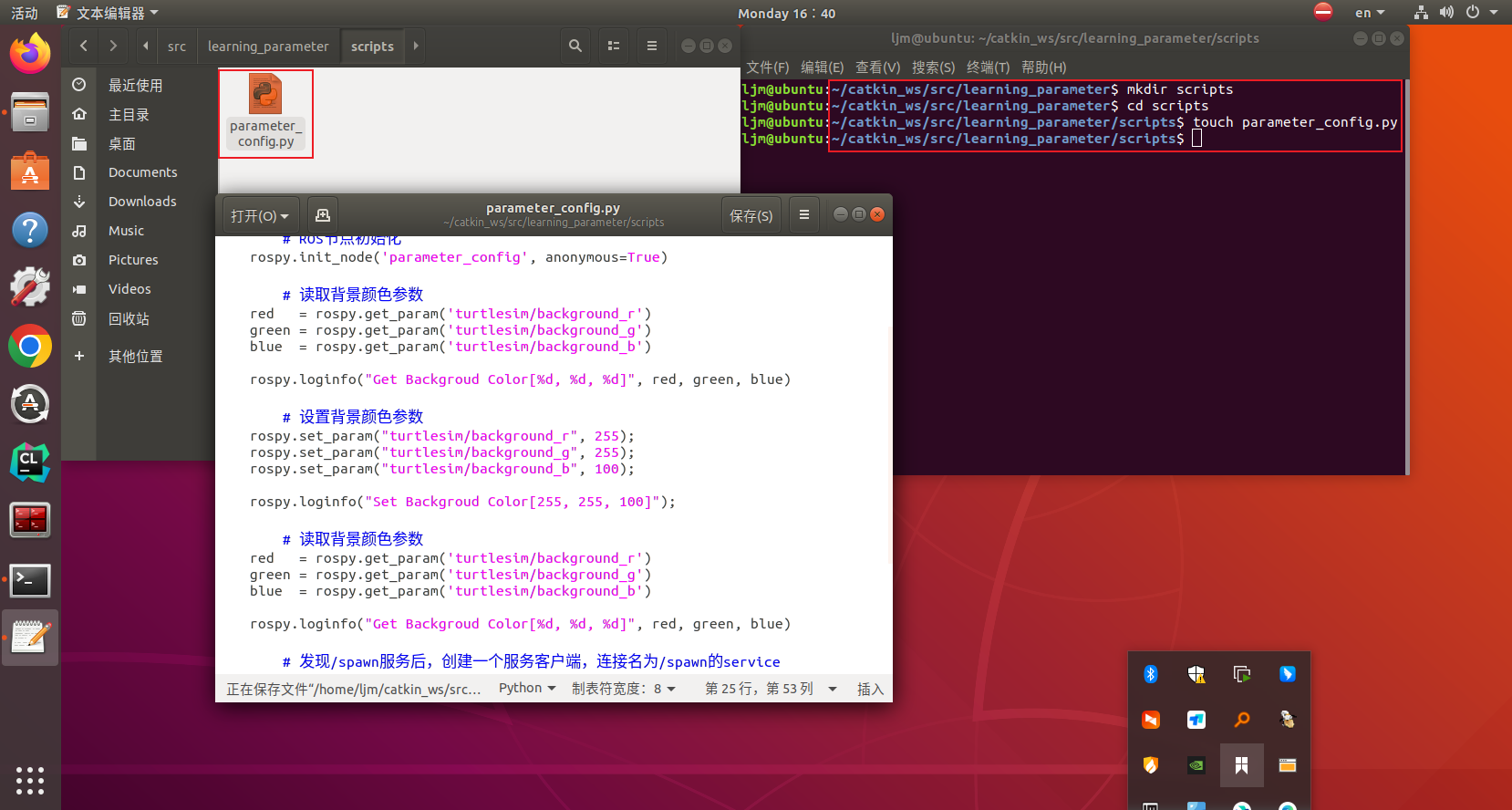
给parameter_config.py文件赋作为可执行文件权限,python文件不需要编译,直接运行即可。

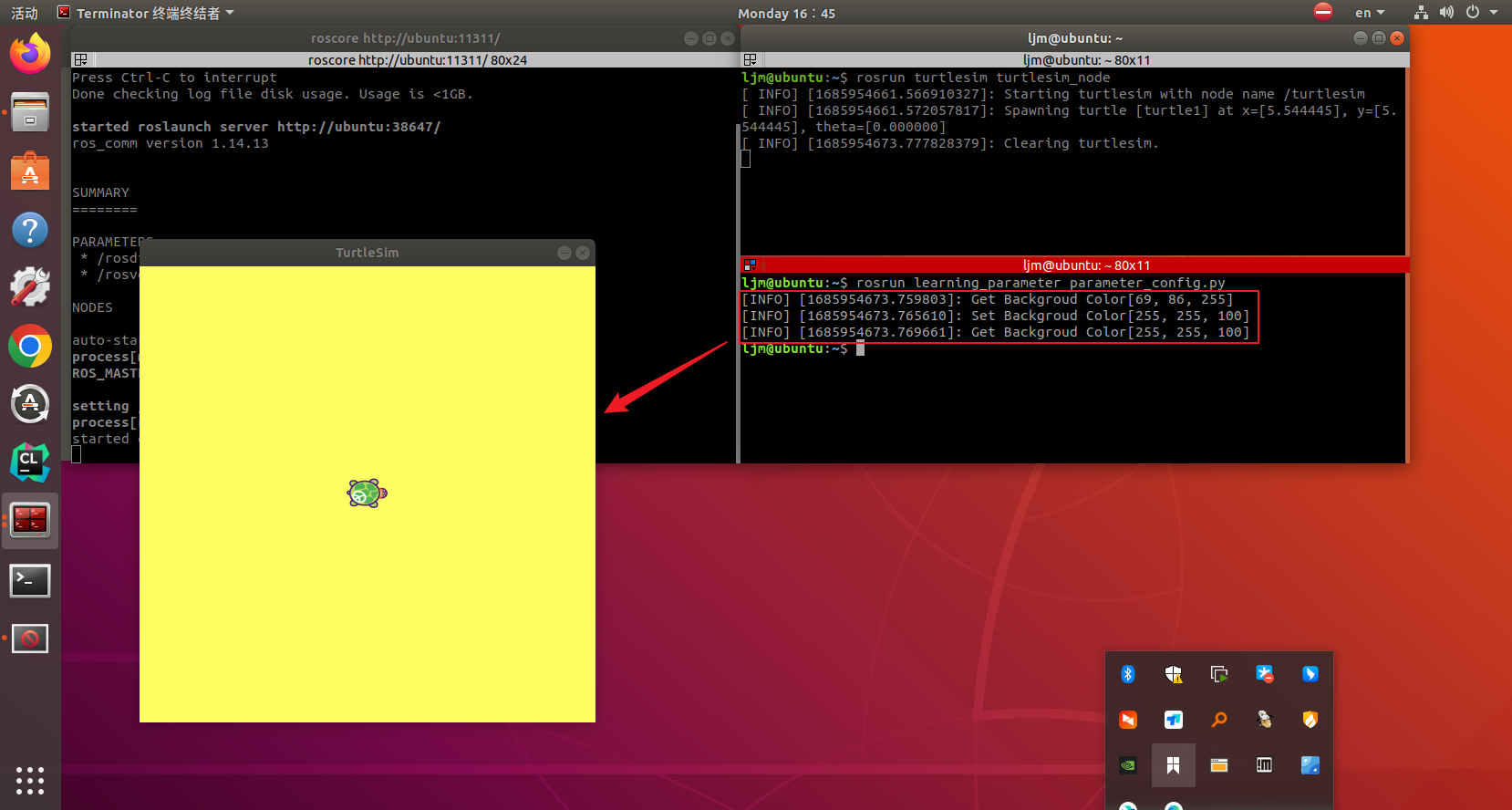
运行效果
roscore rosrun turtlesim turtlesim_node rosrun learning_parameter parameter_config.py
相关文章:
【古月居《ros入门21讲》学习笔记】14_参数的使用与编程方法
目录 说明: 1. 参数模型(全局字典) 2. 实现过程(C) 创建功能包 参数命令行的使用 YAML参数文件 rosparam命令 使用示例 编程方法(C) 配置代码编译规则 编译并运行 编译 运行 3. 实…...

Webpack 懒加载
文章目录 前言懒加载示例后言 前言 hello world欢迎来到前端的新世界 😜当前文章系列专栏:webpack 🐱👓博主在前端领域还有很多知识和技术需要掌握,正在不断努力填补技术短板。(如果出现错误,感谢大家指出…...
深度遍历DFS(括号生成,二叉树所有路径)
正整数 n 代表生成括号的对数,请设计一个函数,用于能够生成所有可能的并且 有效的 括号组合。 示例 1: 输入:n 3 输出:["((()))","(()())","(())()","()(())","()()(…...

Rational Arithmetic
📑打牌 : da pai ge的个人主页 🌤️个人专栏 : da pai ge的博客专栏 ☁️宝剑锋从磨砺出,梅花香自苦寒来 ☁️有理数运算 实现对两个有理数的…...
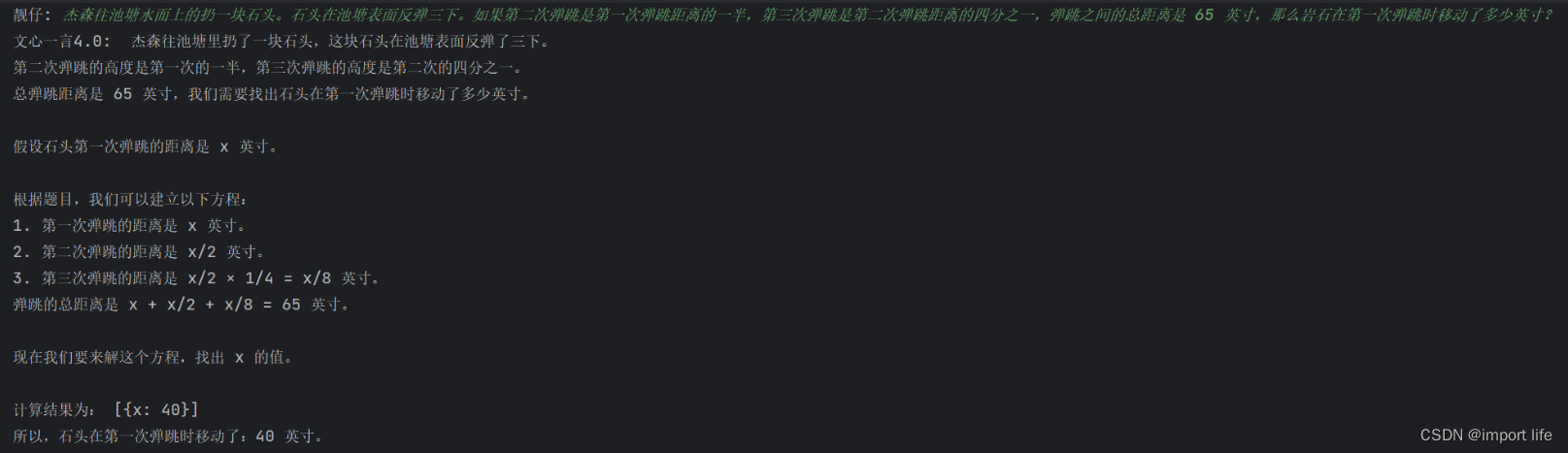
文心一言4.0(ERNIE-Bot-4)申请方法及简单调用代码示例
10月17日过后,估计很多人会看到类似的新闻,如图: 我看到这则新闻也是觉得非常感兴趣,于是本着“百闻不如一见”的实事求是的态度检索如何申请,没想到还真找到了ERNIE-Bot-4(俗称:文心一言4.0&a…...

年终好价节买什么好?这些数码好物闭眼入
大家是不是都没听说过好价节?直截了当地说,这其实就是原先的双十二购物狂欢节,只不过给它起了个新名字。不过,今年毕竟是首次改名,因此淘宝年终好价节的各种优惠,仍然是我们值得期待的!作为年前…...

webpack对项目进行优化
对项目进行优化是提高性能和效率的关键,以下是一些实用的Webpack优化技巧: 代码拆分(Code Splitting):将代码拆分为多个小块,按需加载。通过配置splitChunks插件,可以将公共代码提取到单独的文件…...

Python edge-tts库全部声音模型一览表
下面是edge-tts的声音模型,zh-CN为中文语音模型 Name: af-ZA-AdriNeural Gender: Female Name: af-ZA-WillemNeural Gender: Male Name: am-ET-AmehaNeural Gender: Male Name: am-ET-MekdesNeural Gender: Female Name: ar-AE-FatimaNeural Gender: Female N…...

网络编程相关面试题
目录 1.请解释一下什么是TCP协议的三次握手?2.TCP协议使用什么机制确保数据包的顺序和完整性?3.什么是UDP协议?它与TCP协议有什么不同?4.请解释一下什么是IP地址?为什么需要它?5.请解释一下什么是端口&…...

TCP_NODELAY与TCP通信效率
最近做tcp通信速度测试:主要流程如下所示: //client: while() { send data... recv data... //阻塞 }//server: while() { recv data... send data... } 当每次send数据量较小时,速度极慢!而send数据量较大时速度尚可。两者速度…...
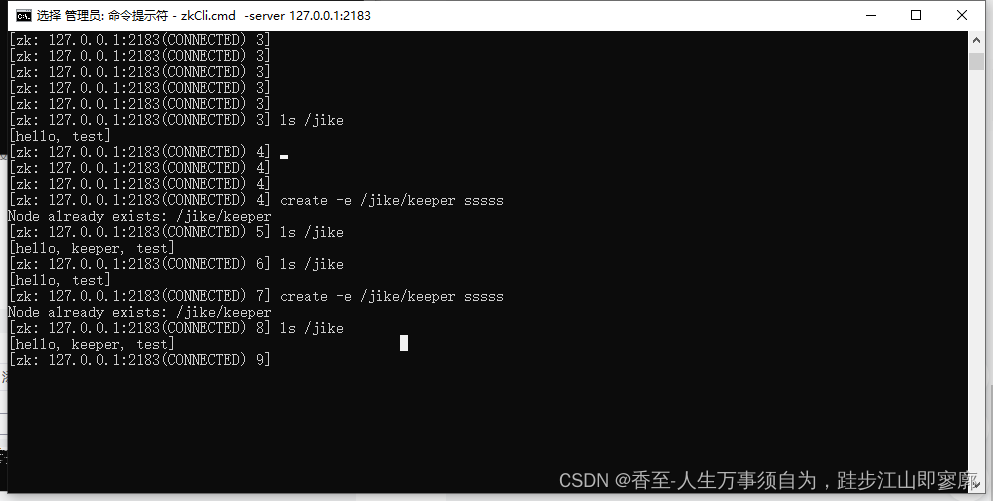
ZooKeeper的分布式锁---客户端命令行测试(实操课程)
本系列是zookeeper相关的实操课程,课程测试环环相扣,请按照顺序阅读测试来学习zookeeper。阅读本文之前,请先阅读----zookeeper 单机伪集群搭建简单记录(实操课程系列)。 阅读本文之前,请先阅读…...

工业4.0时代:图像识别驱动制造业智能生产的未来
在数字化革命的大潮中,工业4.0的到来标志着制造业将迎来全新的智能化时代。其中,图像识别技术作为一项核心技术,正引领着制造业实现了前所未有的智能生产。本文将深入探讨工业4.0时代下,图像识别是如何驱动制造业实现智能生产&…...
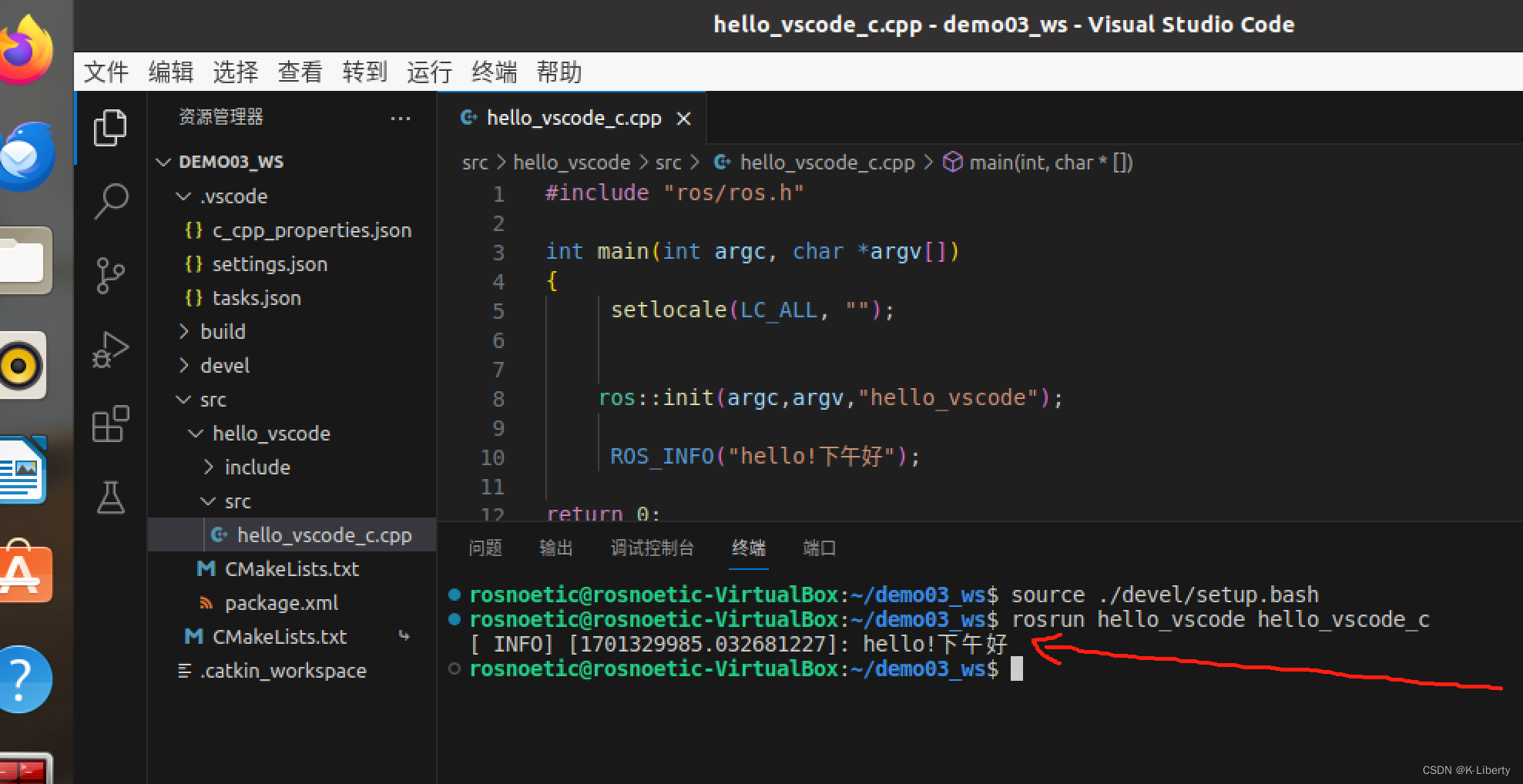
ROS vscode使用基本配置
1、创建ros工作空间 2、启动 vscode 3、vscode 中编译 ros ctrl shift B 调用编译,选择:catkin_make:build 修改.vscode/tasks.json 文件 4、 创建 ROS 功能包 选定 src ---> create catkin package 依次设置包名、添加依赖 5、C 实现 在功能包的 src 下…...

Android、ESP32、ESP8266的mqtt通信
Android activity_main <?xml version"1.0" encoding"utf-8"?> <LinearLayout xmlns:android"http://schemas.android.com/apk/res/android"xmlns:app"http://schemas.android.com/apk/res-auto"xmlns:tools"http:/…...

Hive安装与配置
你需要掌握: 1.Hive的基本安装; 2.Mysql的安装与设置; 3.Hive 的配置。 注意:Hive的安装与配置建立在Hadoop已安装配置好的情况下。 hadopp安装与配置 Hive 的基本安装 从 官网 下载Hive二进制包,下载好放在/op…...

vuejs: 解决浏览器切换页面后setInterval计时器停止执行的问题
setInterval定时器是基于当前页面的,如果切换到其他页面,定时器会被暂停。这是浏览器的一种优化措施,以减少不必要的性能消耗。 如果需要在切换页面后继续执行定时器,可以使用Web Worker,它是在后台运行的程序…...

基于Web邮箱的邮件系统
题目: 基于web的邮件收发系统设计与实现 摘 要 计算机的应用已经越来越广泛,它从产生到完善已经差不多有50年左右的历史,更新换代速度非常快,在人们生活、工作中都发挥了不可替代的作用,几乎所有行业都离不开它,已经成…...
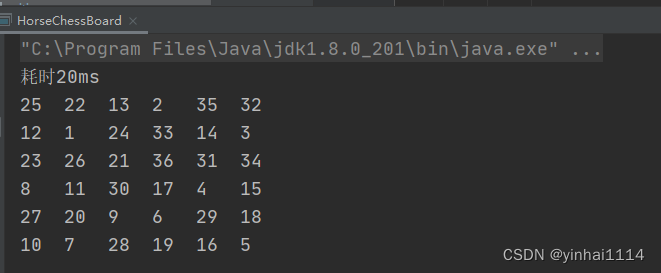
【Java学习笔记】75 - 算法优化入门 - 马踏棋盘问题
一、意义 1.算法是程序的灵魂,为什么有些程序可以在海量数据计算时,依然保持高速计算? 2.拿老韩实际工作经历来说,在Unix下开发服务器程序,功能是要支持上千万人同时在线,在上线前, 做内测,一…...
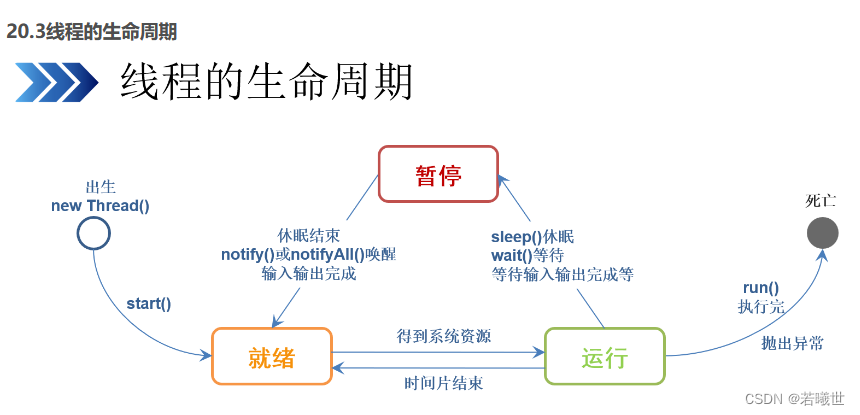
第二十章 多线程
20.2创建线程 20.2.1继承Thread类 Thread类是Java.lang包中的一个类,从这个类中实例化的对象代表线程,程序员启动一个新线程需要建议Thread实例。 public class ThreadTest extedns Thread{} run方法格式: public void run(){} 20.1让线程循…...

vue2使用npm依赖包导出xlsx文件
1.下载依赖npm i xlsx 2.在根目录utils新建mergeXlxs.js /****/ import { utils, writeFile } from "xlsx";export default function mergeHeader(headers, data, datamerges, defaultTitle) {const ws utils.book_new();utils.sheet_add_aoa(ws, headers);//这里…...

量子随机数生成器技术演进与多分布实时生成方案
1. 量子随机数生成器的技术演进与核心挑战量子随机数生成器(QRNG)作为现代密码学和科学计算的基础工具,其发展历程经历了从单一功能到多用途集成的技术跃迁。传统QRNG通常基于单一量子现象(如光子到达时间、真空涨落或激光相位噪声…...
)
山东大学软件学院项目实训-基于语言大模型的智能居家养老健康守护系统-个人博客(五)
智能健康陪诊与个性化干预 Agent 的设计与实现 前言 在基于语言大模型的智能居家养老系统中,我主要负责面向老人端的两个核心 AI Agent 的构建:健康陪诊 Agent 与 健康干预 Agent。前者作为首页全科问答入口提供 24 小时健康咨询服务,后者深度…...

[Python] Python中自带模块级的单例模式-不需要定义单例类
Python中的单例场景 一般一些需要在模块中全局维护的变量(变量修改范围在模块内);简单方式是构建一个全局变量,然后不符合编码规范:1.线程安全与并发问题;2.测试隔离困难;3.缺乏多实例/多租户支…...

Magica Cloth 2:Unity DOTS 布料模拟的架构级重构
1. 为什么 Magica Cloth 2 不是“又一个布料插件”,而是 Unity 实时模拟范式的切换点Magica Cloth 2 这个名字在 Unity 资源商店里看起来平平无奇,和“Advanced Cloth”“Realistic Fabric”这类命名逻辑一致。但如果你真把它当成传统 SkinnedMeshRender…...
)
别再只会用cp了!用dd命令给硬盘做‘全身体检’和‘克隆手术’(附实战命令)
别再只会用cp了!用dd命令给硬盘做‘全身体检’和‘克隆手术’(附实战命令)在Linux系统管理中,文件复制是最基础的操作之一。大多数用户习惯使用cp命令完成日常的文件复制任务,但当面对磁盘级操作时,cp就显得…...

ARM SME架构下BFloat16矩阵运算优化实践
1. ARM SME架构与BFloat16计算概述在当今高性能计算领域,特别是机器学习和人工智能应用中,计算效率和内存带宽利用率成为了关键瓶颈。ARMv9架构引入的SME(Scalable Matrix Extension)扩展正是针对这一需求而设计,其中B…...

XLASSO:高维稀疏建模在极端事件尾部预测中的原理与实践
1. 项目概述:当极端事件遇见高维稀疏性在金融风险管理、气候极端事件预测或是网络流量异常检测中,我们常常面临一个共同的挑战:如何基于有限的历史极端观测数据,对未来可能发生的、更为罕见的“黑天鹅”事件做出可靠预测ÿ…...

AI Agent Harness Engineering 生态系统:基础设施、工具与应用层
AI Agent Harness Engineering 生态系统全解:基础设施、工具链与生产级应用落地 一、引言 钩子 你有没有过这样的经历:花了3天时间调好了一个支持多工具调用的AI Agent Demo,演示的时候能自动查订单、退运费、生成工单,效果惊艳到老板当场拍板要上线。结果真到生产环境跑…...

如何快速获取全网无损音乐:洛雪音乐音源完整使用指南
如何快速获取全网无损音乐:洛雪音乐音源完整使用指南 【免费下载链接】lxmusic- lxmusic(洛雪音乐)全网最新最全音源 项目地址: https://gitcode.com/gh_mirrors/lx/lxmusic- 你是否经常遇到这样的困境:深夜想听一首歌,却发现版权分散…...

Hindsight与金融AI集成:交易决策记忆和分析的终极指南
Hindsight与金融AI集成:交易决策记忆和分析的终极指南 【免费下载链接】hindsight Hindsight: Agent Memory That Learns 项目地址: https://gitcode.com/GitHub_Trending/hindsight2/hindsight Hindsight是一个革命性的智能体记忆系统,专门设计用…...