51爱心流水灯32灯炫酷代码
源代码摘自@远眺883的文章,大佬是30个灯的,感兴趣的铁汁们可以去看看哦~(已取得原作者的许可):基于STC89C51单片机设计的心形流水灯软件代码部分_单片机流水灯代码_远眺883的博客-CSDN博客
由于博主是个小菜鸡,所以有些地方改的不好的请多多包容。
修改方面:
调整了开头单个灯的旋转,并加快了旋转速度,并用appear函数无缝衔接后面的呼吸灯,中间基本没有什么太大的改动,个人觉得时间上比较长,于是缩短了循环的次数,最后的部分也稍微换了一下。
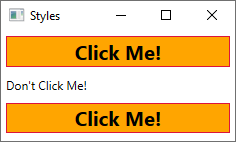
效果:
爱心流水灯(32灯)
源代码分享:
#include <REGX52.H>
#include <Intrins.h>//LED灯引脚,延逆时针定义
sbit LED1=P0^0; sbit LED2=P0^1; sbit LED3=P0^2; sbit LED4=P0^3; sbit LED5=P0^4; sbit LED6=P0^5; sbit LED7=P0^6; sbit LED8=P0^7;
sbit LED24=P2^7; sbit LED23=P2^6; sbit LED22=P2^5; sbit LED21=P2^4; sbit LED20=P2^3; sbit LED19=P2^2; sbit LED18=P2^1;
sbit LED17=P2^0; sbit LED32=P3^7;sbit LED31=P3^6;sbit LED30=P3^5; sbit LED29=P3^4; sbit LED28=P3^3; sbit LED27=P3^2; sbit LED26=P3^1; sbit LED25=P3^0;
sbit LED16=P1^7; sbit LED15=P1^6; sbit LED14=P1^5; sbit LED13=P1^4; sbit LED12=P1^3; sbit LED11=P1^2; sbit LED10=P1^1; sbit LED9=P1^0;int time = 0; //控制呼吸灯亮灯时间
int mode = 0; //呼吸灯模式(渐亮到渐暗)
int i, j; //循环变量//10us延时函数
void Delay(int us) //@12.000MHz
{while(us--){unsigned char i;_nop_();i = 2;while (--i);}
}//全开
void turn_on(void)
{LED9=1; LED10=1; LED11=1; LED12=1; LED13=1; LED14=1; LED15=1; LED16=1;LED25=1; LED26=1; LED27=1; LED28=1; LED29=1; LED30=1;LED31=1;LED32=1;LED17=1; LED18=1; LED19=1; LED20=1; LED21=1; LED22=1; LED23=1; LED24=1;LED8=1; LED7=1; LED6=1; LED5=1; LED4=1; LED3=1; LED2=1; LED1=1;
}//全关
void turn_off(void)
{LED9=0; LED10=0; LED11=0; LED12=0; LED13=0; LED14=0; LED15=0; LED16=0;LED25=0; LED26=0; LED27=0; LED28=0; LED29=0; LED30=0;LED31=0;LED32=0;LED17=0; LED18=0; LED19=0; LED20=0; LED21=0; LED22=0; LED23=0; LED24=0;LED8=0; LED7=0; LED6=0; LED5=0; LED4=0; LED3=0; LED2=0; LED1=0;
}//流水灯
void run_LED(void)
{//顺时针流水灯for(i = 0; i < 1; i++){LED9=1; Delay(2000);LED10=1; Delay(2000);LED11=1; Delay(2000);LED12=1; Delay(2000);LED13=1; Delay(2000);LED14=1; Delay(2000);LED15=1; Delay(2000);LED16=1; Delay(2000);LED25=1; Delay(2000);LED26=1; Delay(2000);LED27=1; Delay(2000);LED28=1; Delay(2000);LED29=1; Delay(2000);LED30=1; Delay(2000);LED31=1; Delay(2000);LED32=1; Delay(2000);LED17=1; Delay(2000);LED18=1; Delay(2000);LED19=1; Delay(2000);LED20=1; Delay(2000);LED21=1; Delay(2000);LED22=1; Delay(2000);LED23=1; Delay(2000);LED24=1; Delay(2000);LED8=1; Delay(2000);LED7=1; Delay(2000);LED6=1; Delay(2000);LED5=1; Delay(2000);LED4=1; Delay(2000);LED3=1; Delay(2000);LED2=1; Delay(2000);LED1=1; Delay(2000);LED9=0; Delay(2000);LED10=0; Delay(2000);LED11=0; Delay(2000);LED12=0; Delay(2000);LED13=0; Delay(2000);LED14=0; Delay(2000);LED15=0; Delay(2000);LED16=0; Delay(2000);LED25=0; Delay(2000);LED26=0; Delay(2000);LED27=0; Delay(2000);LED28=0; Delay(2000);LED29=0; Delay(2000);LED30=0; Delay(2000);LED31=0; Delay(2000);LED32=0; Delay(2000);LED17=0; Delay(2000);LED18=0; Delay(2000);LED19=0; Delay(2000);LED20=0; Delay(2000);LED21=0; Delay(2000);LED22=0; Delay(2000);LED23=0; Delay(2000);LED24=0; Delay(2000);LED8=0; Delay(2000);LED7=0; Delay(2000);LED6=0; Delay(2000);LED5=0; Delay(2000);LED4=0; Delay(2000);LED3=0; Delay(2000);LED2=0; Delay(2000);LED1=0; Delay(2000);}//逆时针流水灯for(i = 0; i < 1; i++){LED1=1; Delay(2000);LED2=1; Delay(2000);LED3=1; Delay(2000);LED4=1; Delay(2000);LED5=1; Delay(2000);LED6=1; Delay(2000);LED7=1; Delay(2000);LED8=1; Delay(2000);LED24=1; Delay(2000);LED23=1; Delay(2000);LED22=1; Delay(2000);LED21=1; Delay(2000);LED20=1; Delay(2000);LED19=1; Delay(2000);LED18=1; Delay(2000);LED17=1; Delay(2000);LED32=1; Delay(2000);LED31=1; Delay(2000);LED30=1; Delay(2000);LED29=1; Delay(2000);LED28=1; Delay(2000);LED27=1; Delay(2000);LED26=1; Delay(2000);LED25=1; Delay(2000);LED16=1; Delay(2000);LED15=1; Delay(2000);LED14=1; Delay(2000);LED13=1; Delay(2000);LED12=1; Delay(2000);LED11=1; Delay(2000);LED10=1; Delay(2000);LED9=1; Delay(2000);LED1=0; Delay(2000);LED2=0; Delay(2000);LED3=0; Delay(2000);LED4=0; Delay(2000);LED5=0; Delay(2000);LED6=0; Delay(2000);LED7=0; Delay(2000);LED8=0; Delay(2000);LED24=0; Delay(2000);LED23=0; Delay(2000);LED22=0; Delay(2000);LED21=0; Delay(2000);LED20=0; Delay(2000);LED19=0; Delay(2000);LED18=0; Delay(2000);LED17=0; Delay(2000);LED32=0; Delay(2000);LED31=0; Delay(2000);LED30=0; Delay(2000);LED29=0; Delay(2000);LED28=0; Delay(2000);LED27=0; Delay(2000);LED26=0; Delay(2000);LED25=0; Delay(2000);LED16=0; Delay(2000);LED15=0; Delay(2000);LED14=0; Delay(2000);LED13=0; Delay(2000);LED12=0; Delay(2000);LED11=0; Delay(2000);LED10=0; Delay(2000);LED9=0; Delay(2000);}
}void run_LED_2(void)
{//顺时针流水灯for(i = 0; i < 1; i++){LED9=1; Delay(2000);LED10=1; Delay(2000);LED11=1; Delay(2000);LED12=1; Delay(2000);LED13=1; Delay(2000);LED14=1; Delay(2000);LED15=1; Delay(2000);LED16=1; Delay(2000);LED25=1; Delay(2000);LED26=1; Delay(2000);LED27=1; Delay(2000);LED28=1; Delay(2000);LED29=1; Delay(2000);LED30=1; Delay(2000);LED31=1; Delay(2000);LED32=1; Delay(2000);LED17=1; Delay(2000);LED18=1; Delay(2000);LED19=1; Delay(2000);LED20=1; Delay(2000);LED21=1; Delay(2000);LED22=1; Delay(2000);LED23=1; Delay(2000);LED24=1; Delay(2000);LED8=1; Delay(2000);LED7=1; Delay(2000);LED6=1; Delay(2000);LED5=1; Delay(2000);LED4=1; Delay(2000);LED3=1; Delay(2000);LED2=1; Delay(2000);LED1=1; Delay(2000);LED9=0; Delay(2000);LED10=0; Delay(2000);LED11=0; Delay(2000);LED12=0; Delay(2000);LED13=0; Delay(2000);LED14=0; Delay(2000);LED15=0; Delay(2000);LED16=0; Delay(2000);LED25=0; Delay(2000);LED26=0; Delay(2000);LED27=0; Delay(2000);LED28=0; Delay(2000);LED29=0; Delay(2000);LED30=0; Delay(2000);LED31=0; Delay(2000);LED32=0; Delay(2000);LED17=0; Delay(2000);LED18=0; Delay(2000);LED19=0; Delay(2000);LED20=0; Delay(2000);LED21=0; Delay(2000);LED22=0; Delay(2000);LED23=0; Delay(2000);LED24=0; Delay(2000);LED8=0; Delay(2000);LED7=0; Delay(2000);LED6=0; Delay(2000);LED5=0; Delay(2000);LED4=0; Delay(2000);LED3=0; Delay(2000);LED2=0; Delay(2000);LED1=0; Delay(2000);//逆时针流水灯LED1=1; Delay(2000);LED2=1; Delay(2000);LED3=1; Delay(2000);LED4=1; Delay(2000);LED5=1; Delay(2000);LED6=1; Delay(2000);LED7=1; Delay(2000);LED8=1; Delay(2000);LED24=1; Delay(2000);LED23=1; Delay(2000);LED22=1; Delay(2000);LED21=1; Delay(2000);LED20=1; Delay(2000);LED19=1; Delay(2000);LED18=1; Delay(2000);LED17=1; Delay(2000);LED32=1; Delay(2000);LED31=1; Delay(2000);LED30=1; Delay(2000);LED29=1; Delay(2000);LED28=1; Delay(2000);LED27=1; Delay(2000);LED26=1; Delay(2000);LED25=1; Delay(2000);LED16=1; Delay(2000);LED15=1; Delay(2000);LED14=1; Delay(2000);LED13=1; Delay(2000);LED12=1; Delay(2000);LED11=1; Delay(2000);LED10=1; Delay(2000);LED9=1; Delay(2000);LED1=0; Delay(2000);LED2=0; Delay(2000);LED3=0; Delay(2000);LED4=0; Delay(2000);LED5=0; Delay(2000);LED6=0; Delay(2000);LED7=0; Delay(2000);LED8=0; Delay(2000);LED24=0; Delay(2000);LED23=0; Delay(2000);LED22=0; Delay(2000);LED21=0; Delay(2000);LED20=0; Delay(2000);LED19=0; Delay(2000);LED18=0; Delay(2000);LED17=0; Delay(2000);LED32=0; Delay(2000);LED31=0; Delay(2000);LED30=0; Delay(2000);LED29=0; Delay(2000);LED28=0; Delay(2000);LED27=0; Delay(2000);LED26=0; Delay(2000);LED25=0; Delay(2000);LED16=0; Delay(2000);LED15=0; Delay(2000);LED14=0; Delay(2000);LED13=0; Delay(2000);LED12=0; Delay(2000);LED11=0; Delay(2000);LED10=0; Delay(2000);LED9=0; Delay(2000);}
}//呼吸灯部分
void breathe_LED(void)
{for(i = 0; i < 300; i++){//全开turn_on();Delay(16 * time);//全关turn_off();Delay(16 * (50 - time));if(mode == 0) time++;else if(mode == 1)time--;if(time >= 50 || time <= 0){mode++;mode %= 2;}}
}//上下往返
void fall_rise_LED(void)
{for(i = 0; i < 2; i++){//初始时全关闭turn_off();Delay(10000);//从上至下LED9=1; LED1=1; Delay(2000);LED10=1; LED2=1; Delay(2000);LED11=1; LED3=1; Delay(2000);LED12=1; LED4=1; Delay(2000);LED13=1; LED5=1; Delay(2000);LED14=1; LED6=1; Delay(2000);LED15=1; LED7=1; Delay(2000);LED16=1; LED8=1; Delay(2000);LED25=1; LED24=1; Delay(2000);LED26=1; LED23=1; Delay(2000);LED27=1; LED22=1; Delay(2000);LED28=1; LED21=1; Delay(2000);LED29=1; LED20=1; Delay(2000);LED30=1; LED19=1; Delay(2000);LED31=1; LED18=1; Delay(2000);LED32=1; LED17=1; Delay(2000);LED17=1; LED16=1; Delay(2000);//闪烁两次for(j = 0; j < 2; j++){//全关turn_off();Delay(10000);//全开turn_on();Delay(10000);}//全关turn_off();//从上至下LED17=1; LED16=1; Delay(2000);LED32=1; LED17=1; Delay(2000);LED31=1; LED18=1; Delay(2000);LED30=1; LED19=1; Delay(2000);LED29=1; LED20=1; Delay(2000);LED28=1; LED21=1; Delay(2000);LED27=1; LED22=1; Delay(2000);LED26=1; LED23=1; Delay(2000);LED25=1; LED24=1; Delay(2000);LED16=1; LED8=1; Delay(2000);LED15=1; LED7=1; Delay(2000);LED14=1; LED6=1; Delay(2000);LED13=1; LED5=1; Delay(2000);LED12=1; LED4=1; Delay(2000);LED11=1; LED3=1; Delay(2000);LED10=1; LED2=1; Delay(2000);LED9=1; LED1=1; Delay(2000);for(j = 0; j < 2; j++){//全关turn_off();Delay(10000);//全开turn_on();Delay(10000);}}
}//满天星
void star_LED(void)
{for(i = 0; i < 15; i++){//正LED9=1; LED10=0; LED11=1; LED12=0; LED13=1; LED14=0; LED15=1; LED16=0;LED25=1; LED26=0; LED27=1; LED28=0; LED29=1; LED30=0;LED31=1;LED32=0;LED17=1; LED18=0; LED19=1; LED20=0; LED21=1; LED22=0; LED23=1; LED24=0;LED8=1; LED7=0; LED6=1; LED5=0; LED4=1; LED3=0; LED2=1; LED1=0;Delay(6000);//反LED9=0; LED10=1; LED11=0; LED12=1; LED13=0; LED14=1; LED15=0; LED16=1;LED25=0; LED26=1; LED27=0; LED28=1; LED29=0; LED30=1;LED31=0;LED32=1;LED17=0; LED18=1; LED19=0; LED20=1; LED21=0; LED22=1; LED23=0; LED24=1;LED8=0; LED7=1; LED6=0; LED5=1; LED4=0; LED3=1; LED2=0; LED1=1;Delay(6000);}
}//双线环绕
void chase_LED(void)
{LED9=0; LED18=0; Delay(2000);LED10=0; LED19=0; Delay(2000);LED11=0; LED20=0; Delay(2000);LED12=0; LED21=0; Delay(2000);LED13=0; LED22=0; Delay(2000);LED14=0; LED23=0; Delay(2000);LED15=0; LED24=0; Delay(2000);LED16=0; LED10=0; Delay(2000);LED25=0; LED9=0; Delay(2000);LED26=0; LED8=0; Delay(2000);LED27=0; LED7=0; Delay(2000);LED28=0; LED6=0; Delay(2000);LED29=0; LED5=0; Delay(2000);LED30=0; LED4=0; Delay(2000);LED31=0; LED3=0; Delay(2000);LED32=0; LED2=0; Delay(2000);LED17=0; LED1=0; Delay(2000);LED9=1; LED18=1; Delay(2000);LED10=1; LED19=1; Delay(2000);LED11=1; LED20=1; Delay(2000);LED12=1; LED21=1; Delay(2000);LED13=1; LED22=1; Delay(2000);LED14=1; LED23=1; Delay(2000);LED15=1; LED24=1; Delay(2000);LED16=1; LED10=1; Delay(2000);LED25=1; LED9=1; Delay(2000);LED26=1; LED8=1; Delay(2000);LED27=1; LED7=1; Delay(2000);LED28=1; LED6=1; Delay(2000);LED29=1; LED5=1; Delay(2000);LED30=1; LED4=1; Delay(2000);LED31=1; LED3=1; Delay(2000);LED32=1; LED2=1; Delay(2000);LED17=1; LED1=1; Delay(2000);Delay(12000);
}//反双线环绕
void chase_LED_reverse(void)
{LED17=0; LED1=0; Delay(2000);LED32=0; LED2=0; Delay(2000);LED31=0; LED3=0; Delay(2000);LED30=0; LED4=0; Delay(2000);LED29=0; LED5=0; Delay(2000);LED28=0; LED6=0; Delay(2000);LED27=0; LED7=0; Delay(2000);LED26=0; LED8=0; Delay(2000);LED25=0; LED9=0; Delay(2000);LED16=0; LED10=0; Delay(2000);LED15=0; LED24=0; Delay(2000);LED14=0; LED23=0; Delay(2000);LED13=0; LED22=0; Delay(2000);LED12=0; LED21=0; Delay(2000);LED11=0; LED20=0; Delay(2000);LED10=0; LED19=0; Delay(2000);LED9=0; LED18=0; Delay(2000);LED17=1; LED1=1; Delay(2000);LED32=1; LED2=1; Delay(2000);LED31=1; LED3=1; Delay(2000);LED30=1; LED4=1; Delay(2000);LED29=1; LED5=1; Delay(2000);LED28=1; LED6=1; Delay(2000);LED27=1; LED7=1; Delay(2000);LED26=1; LED8=1; Delay(2000);LED25=1; LED9=1; Delay(2000);LED16=1; LED10=1; Delay(2000);LED15=1; LED24=1; Delay(2000);LED14=1; LED23=1; Delay(2000);LED13=1; LED22=1; Delay(2000);LED12=1; LED21=1; Delay(2000);LED11=1; LED20=1; Delay(2000);LED10=1; LED19=1; Delay(2000);LED9=1; LED18=1; Delay(2000);Delay(12000);
}//双线往返环绕
void chase_LED_back(void)
{LED17=0; LED1=0; Delay(2000);LED32=0; LED2=0; Delay(2000);LED31=0; LED3=0; Delay(2000);LED30=0; LED4=0; Delay(2000);LED29=0; LED5=0; Delay(2000);LED28=0; LED6=0; Delay(2000);LED27=0; LED7=0; Delay(2000);LED26=0; LED8=0; Delay(2000);LED25=0; LED9=0; Delay(2000);LED16=0; LED10=0; Delay(2000);LED15=0; LED24=0; Delay(2000);LED14=0; LED23=0; Delay(2000);LED13=0; LED22=0; Delay(2000);LED12=0; LED21=0; Delay(2000);LED11=0; LED20=0; Delay(2000);LED10=0; LED19=0; Delay(2000);LED9=0; LED18=0; Delay(2000);LED9=1; LED18=1; Delay(2000);LED10=1; LED19=1; Delay(2000);LED11=1; LED20=1; Delay(2000);LED12=1; LED21=1; Delay(2000);LED13=1; LED22=1; Delay(2000);LED14=1; LED23=1; Delay(2000);LED15=1; LED24=1; Delay(2000);LED16=1; LED10=1; Delay(2000);LED25=1; LED9=1; Delay(2000);LED26=1; LED8=1; Delay(2000);LED27=1; LED7=1; Delay(2000);LED28=1; LED6=1; Delay(2000);LED29=1; LED5=1; Delay(2000);LED30=1; LED4=1; Delay(2000);LED31=1; LED3=1; Delay(2000);LED32=1; LED2=1; Delay(2000);LED17=1; LED1=1; Delay(2000);Delay(12000);
}//反双线往返环绕
void chase_LED_back_reverse(void)
{LED9=0; LED18=0; Delay(2000);LED10=0; LED19=0; Delay(2000);LED11=0; LED20=0; Delay(2000);LED12=0; LED21=0; Delay(2000);LED13=0; LED22=0; Delay(2000);LED14=0; LED23=0; Delay(2000);LED15=0; LED24=0; Delay(2000);LED16=0; LED10=0; Delay(2000);LED25=0; LED9=0; Delay(2000);LED26=0; LED8=0; Delay(2000);LED27=0; LED7=0; Delay(2000);LED28=0; LED6=0; Delay(2000);LED29=0; LED5=0; Delay(2000);LED30=0; LED4=0; Delay(2000);LED31=0; LED3=0; Delay(2000);LED32=0; LED2=0; Delay(2000);LED17=0; LED1=0; Delay(2000);LED17=1; LED1=1; Delay(2000);LED32=1; LED2=1; Delay(2000);LED31=1; LED3=1; Delay(2000);LED30=1; LED4=1; Delay(2000);LED29=1; LED5=1; Delay(2000);LED28=1; LED6=1; Delay(2000);LED27=1; LED7=1; Delay(2000);LED26=1; LED8=1; Delay(2000);LED25=1; LED9=1; Delay(2000);LED16=1; LED10=1; Delay(2000);LED15=1; LED24=1; Delay(2000);LED14=1; LED23=1; Delay(2000);LED13=1; LED22=1; Delay(2000);LED12=1; LED21=1; Delay(2000);LED11=1; LED20=1; Delay(2000);LED10=1; LED19=1; Delay(2000);LED9=1; LED18=1; Delay(2000);Delay(12000);
}//延时控制变量
int one_time = 1500;void one_LED(void)
{ if(one_time > 10){//单灯绕圈LED25=0; LED16=1; Delay(one_time);LED26=0; LED25=1; Delay(one_time);LED27=0; LED26=1; Delay(one_time);LED28=0; LED27=1; Delay(one_time);LED29=0; LED28=1; Delay(one_time);LED30=0; LED29=1; Delay(one_time);LED31=0; LED30=1; Delay(one_time);LED32=0; LED31=1; Delay(one_time);LED17=0; LED32=1; Delay(one_time);LED18=0; LED17=1; Delay(one_time);LED19=0; LED18=1; Delay(one_time);LED20=0; LED19=1; Delay(one_time);LED21=0; LED20=1; Delay(one_time);LED22=0; LED21=1; Delay(one_time);LED23=0; LED22=1; Delay(one_time);LED24=0; LED23=1; Delay(one_time);LED8=0; LED24=1; Delay(one_time);LED7=0; LED8=1; Delay(one_time);LED6=0; LED7=1; Delay(one_time);LED5=0; LED6=1; Delay(one_time);LED4=0; LED5=1; Delay(one_time);LED3=0; LED4=1; Delay(one_time);LED2=0; LED3=1; Delay(one_time);LED1=0; LED2=1; Delay(one_time); LED9=0; LED1=1; Delay(one_time);LED10=0; LED9=1; Delay(one_time);LED11=0; LED10=1; Delay(one_time);LED12=0; LED11=1; Delay(one_time);LED13=0; LED12=1; Delay(one_time);LED14=0; LED13=1; Delay(one_time);LED15=0; LED14=1; Delay(one_time);LED16=0; LED15=1; Delay(one_time);//反单灯绕圈LED16=1; LED15=0; Delay(one_time);LED15=1; LED14=0; Delay(one_time);LED14=1; LED13=0; Delay(one_time);LED13=1; LED12=0; Delay(one_time);LED12=1; LED11=0; Delay(one_time);LED11=1; LED10=0; Delay(one_time);LED10=1; LED9=0; Delay(one_time);LED9=1; LED1=0; Delay(one_time);LED1=1; LED2=0; Delay(one_time); LED2=1; LED3=0; Delay(one_time);LED3=1; LED4=0; Delay(one_time);LED4=1; LED5=0; Delay(one_time);LED5=1; LED6=0; Delay(one_time);LED6=1; LED7=0; Delay(one_time);LED7=1; LED8=0; Delay(one_time);LED8=1; LED24=0; Delay(one_time);LED24=1; LED23=0; Delay(one_time);LED23=1; LED22=0; Delay(one_time);LED22=1; LED21=0; Delay(one_time);LED21=1; LED20=0; Delay(one_time);LED20=1; LED18=0; Delay(one_time);LED18=1; LED17=0; Delay(one_time);LED17=1; LED32=0; Delay(one_time);LED32=1; LED31=0; Delay(one_time);LED31=1; LED30=0; Delay(one_time);LED30=1; LED29=0; Delay(one_time);LED29=1; LED28=0; Delay(one_time);LED28=1; LED27=0; Delay(one_time);LED27=1; LED26=0; Delay(one_time);LED26=1; LED25=0; Delay(one_time);LED25=1; LED16=0; Delay(one_time);}else{for(i = 1; i <= 29; i++){//全开turn_on();Delay(i*10);//全关turn_off();Delay((29 - i)*10);}}//当延时时间高于10*10us时if(one_time > 100){one_time -= 300; //延时每圈减300}//当延时在10以上以及100以下时else if(one_time > 10 && one_time <= 100){one_time -= 3; //延时每圈减3}//当延时在10以下或者100以上时else{one_time = 10; //延时10}
}
//从下往上依次亮灯
appear_LED(void)
{LED16=0;Delay(3000);LED15=0;LED25=0;Delay(3000);LED14=0;LED26=0;Delay(3000);LED13=0;LED27=0;Delay(3000);LED12=0;LED28=0;Delay(3000);LED11=0;LED29=0;Delay(3000);LED10=0;LED30=0;Delay(3000);LED9=0;LED31=0;Delay(3000);LED1=0;LED32=0;Delay(3000);LED2=0;LED17=0;Delay(3000);LED3=0;LED18=0;Delay(3000);LED4=0;LED19=0;Delay(3000);LED5=0;LED20=0;Delay(3000);LED6=0;LED21=0;Delay(3000);LED7=0;LED22=0;Delay(3000);LED8=0;LED23=0;Delay(3000);LED24=0;Delay(3000);}//竖向变换
void vertical_LED(void)
{//依次亮起两个灯LED9=1; LED1=1; LED27=0; LED22=0; Delay(5000);LED10=1; LED2=1; LED28=0; LED21=0; Delay(5000);LED11=1; LED3=1; LED29=0; LED20=0; Delay(5000);LED12=1; LED4=1; LED30=0; LED19=0; Delay(5000);LED13=1; LED5=1; LED17=0; LED18=0; Delay(5000);LED14=1; LED6=1; LED9=0; LED1=0; Delay(5000);LED15=1; LED7=1; LED10=0; LED2=0; Delay(5000);LED16=1; LED8=1; LED11=0; LED3=0; Delay(5000);LED25=1; LED24=1; LED12=0; LED4=0; Delay(5000);LED26=1; LED23=1; LED13=0; LED5=0; Delay(5000);LED27=1; LED22=1; LED14=0; LED6=0; Delay(5000);LED28=1; LED21=1; LED15=0; LED7=0; Delay(5000);LED29=1; LED20=1; LED16=0; LED8=0; Delay(5000);LED30=1; LED19=1; LED25=0; LED24=0; Delay(5000);LED31=1; LED18=1; LED26=0; LED23=0; Delay(5000);LED32=1; LED17=1; LED27=0; LED22=0; Delay(5000);
}void transverse_LED(void)
{//横向亮灯LED16=1;Delay(4000);LED15=1; LED8=1; LED25=1; Delay(4000);LED14=1; LED7=1; LED26=1; LED24=1; Delay(4000);LED13=1; LED6=1; LED27=1; LED23=1; Delay(4000);LED12=1; LED5=1; LED28=1; LED22=1; Delay(4000);LED11=1; LED4=1; LED29=1; LED21=1; Delay(4000);LED10=1; LED3=1; LED30=1; LED20=1; Delay(4000);LED9=1; LED2=1; LED31=1; LED19=1; Delay(4000);LED1=1; LED32=1; LED17=1;LED18=1; Delay(4000);Delay(20000);
}//反横向亮灯
void tran_LED(void)
{LED1=0; LED32=0; LED17=0;LED18=0; Delay(4000);LED9=0; LED2=0; LED31=0; LED19=0; Delay(4000);LED10=0; LED3=0; LED30=0; LED20=0; Delay(4000);LED11=0; LED4=0; LED29=0; LED21=0; Delay(4000);LED12=0; LED5=0; LED28=0; LED22=0; Delay(4000);LED13=0; LED6=0; LED27=0; LED23=0; Delay(4000);LED14=0; LED7=0; LED26=0; LED24=0; Delay(4000);LED15=0; LED8=0; LED25=0; Delay(4000);LED16=0;Delay(4000);Delay(20000);
}
void main()
{//全关turn_off();transverse_LED();tran_LED();turn_on;while(1){for(i = 0; i < 5; i++){//单灯循环one_LED();}appear_LED();//呼吸灯部分breathe_LED();turn_off();//流水灯部分run_LED();turn_off();run_LED_2();turn_off();//上下往返fall_rise_LED();turn_off();//满天星star_LED();turn_off();for(i = 0; i < 2; i++){//双线环绕往返正向chase_LED();//双线环绕往返反向chase_LED_reverse();}for(i = 0; i < 2; i++){//双线环绕chase_LED_back();//双线环绕反方向chase_LED_back_reverse();}turn_off();for(i = 0; i < 2; i++){//竖向闪灯vertical_LED();turn_off();}for(i = 0; i < 2; i++){//横向闪灯transverse_LED();tran_LED();if(i < 1){ //第2次不关灯turn_off();}}for(i = 0; i < 2; i++){//呼吸灯breathe_LED();}//将单灯循环延时变量恢复原值one_time = 1500;}
}
本篇博客就到此为止,谢谢大家的支持!
相关文章:
51爱心流水灯32灯炫酷代码
源代码摘自远眺883的文章,大佬是30个灯的,感兴趣的铁汁们可以去看看哦~(已取得原作者的许可):基于STC89C51单片机设计的心形流水灯软件代码部分_单片机流水灯代码_远眺883的博客-CSDN博客 由于博主是个小菜鸡ÿ…...
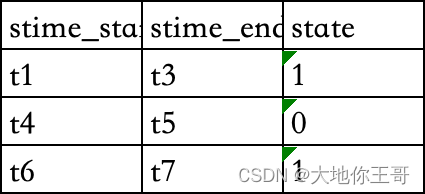
将不同时间点的登录状态记录转化为不同时间段的相同登录状态SQL求解
题目 有不同时间点的登录状态记录表state_log如下 请使用sql将其转化为如下表的不同时间段的相同登录状态记录 思路分析: 此类问题需要用到lag或lead函数取上下行对应的数据,然后对前后结果做比较打标签(0或1),再…...

正则表达式与SQL数据库教程
使用正则表达式通过用例查询 Postgres 数据库: 正则表达式(又名 Regex) 正则表达式是一个强大的工具,广泛用于模式匹配和文本操作。 几乎所有编程语言都支持它们,并且经常用于文本提取、搜索和匹配文本等用例。 正则…...
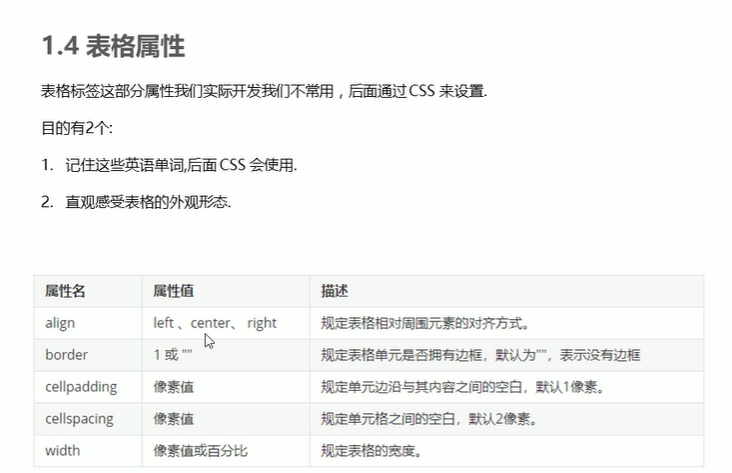
HTML_web扩展标签
1.表格标签 2.增强表头表现 4.表格属性(实际不常用) 结构标签: 合并单元格: 更多请查看主页...
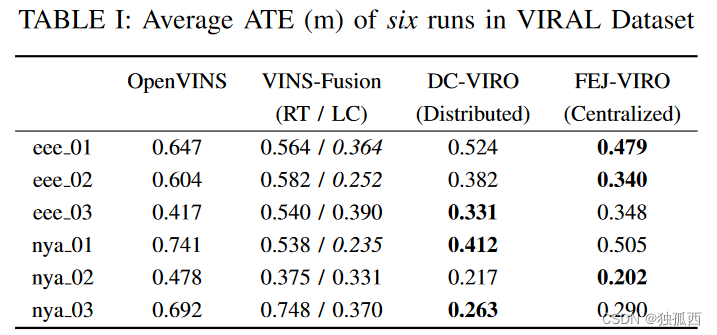
论文阅读:Distributed Initialization for VVIRO with Position-Unknown UWB Network
前言 Distributed Initialization for Visual-Inertial-Ranging Odometry with Position-Unknown UWB Network这篇论文是发表在ICRA 2023上的一篇文章,本文提出了一种基于位置未知UWB网络的一致性视觉惯性紧耦合优化测距算法( DC-VIRO )的分布式初始化方法。 对于…...
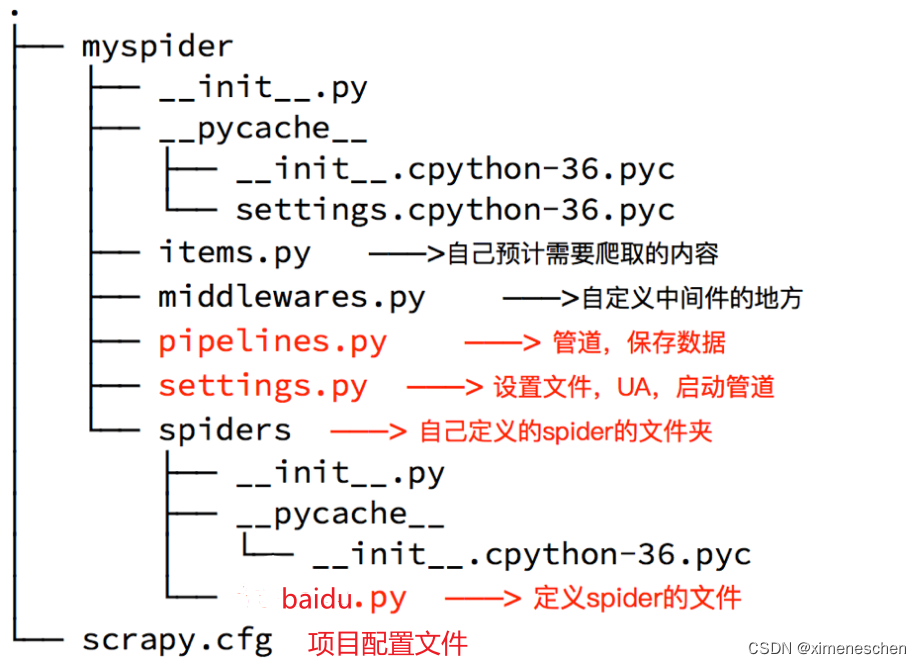
scrapy爬虫中间件和下载中间件的使用
一、关于中间件 之前文章说过,scrapy有两种中间件:爬虫中间件和下载中间件,他们的作用时间和位置都不一样,具体区别如下: 爬虫中间件(Spider Middleware) 作用: 爬虫中间件主要负…...
手敲单链表,简单了解其运行逻辑
1. 链表 1.1 结构组成 链表是一种物理存储结构上非连续存储结构,数据元素的逻辑顺序是通过链表中的引用链接次序实现的 。 链表的结构如下图所示,是由很多个节点相互通过引用来连接而成的;每一个节点由两部分组成,分别数据域&…...

Redis RDB
基于内存的 Redis, 数据都是存储在内存中的。 那么如果重启的话, 数据就会丢失。 为了解决这个问题, Redis 提供了 2 种数据持久化的方案: RDB 和 AOF。 RDB 是 Redis 默认的持久化方案。当满足一定条件的时候, 会把当前内存中的数据写入磁盘, 生成一个快照文件 dump.rdb。Redi…...

Elasticsearch一些函数查询
1. 根据价格分组统计数量,每组区间为2000, filter_pathaggregations 设置查询结果只展示函数结果 也有date_histogram函数根据日期分组等等 GET order/_search?filter_pathaggregations {"aggs": {"hist_price": {"histogr…...
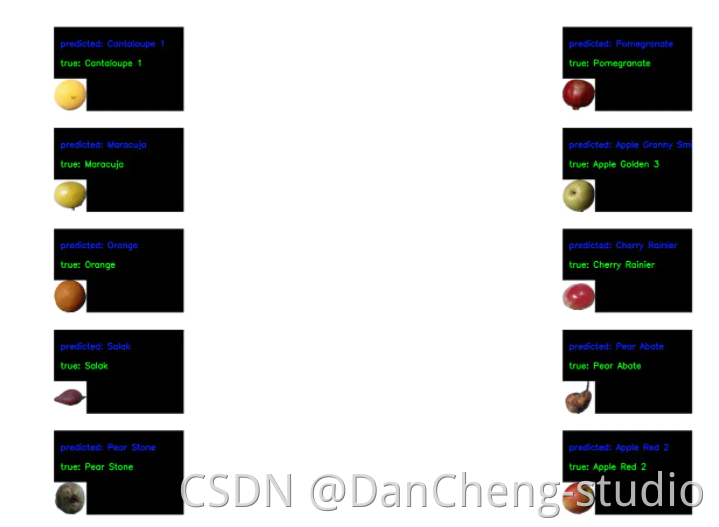
竞赛选题 : 题目:基于深度学习的水果识别 设计 开题 技术
1 前言 Hi,大家好,这里是丹成学长,今天做一个 基于深度学习的水果识别demo 这是一个较为新颖的竞赛课题方向,学长非常推荐! 🧿 更多资料, 项目分享: https://gitee.com/dancheng-senior/pos…...
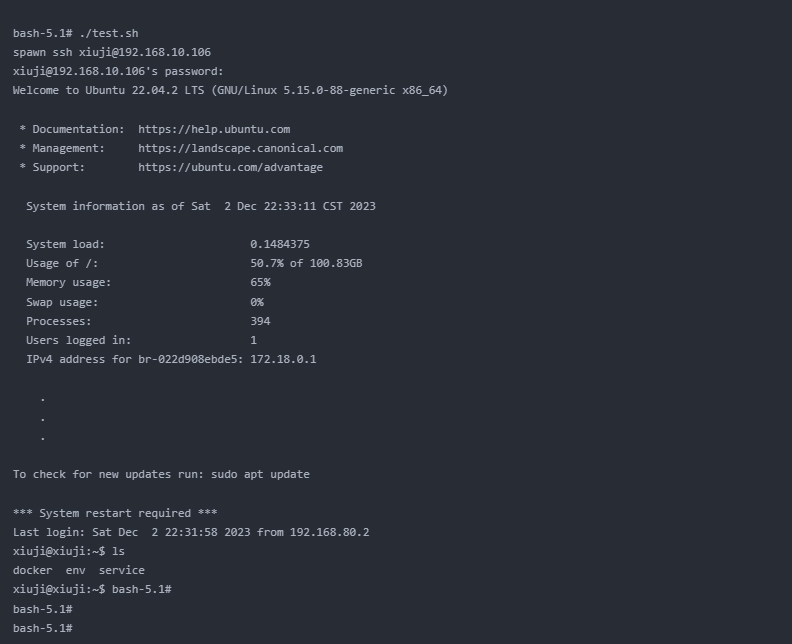
Linux expect命令详解
在Linux系统中,expect 是一款非常有用的工具,它允许用户自动化与需要用户输入进行交互的程序。本文将深入探讨expect命令的基本语法、使用方法以及一些最佳实践。 什么是Expect命令? expect 是一个用于自动化交互式进程的工具。它的主要功能…...

ubuntu18编译Android8的Failed to contact Jack server问题
环境 ubuntu18.04 Android8.1.0 步骤 安装环境 apt install git-core apt install gnupg apt install flex apt install bison apt install gperf apt install build-essential apt install curl apt install libc6-dev apt install libssl-dev apt install libncurses5-dev:…...

FindSecBugs支持的检测规则
很多SAST集成了FindSecBugs这个开源工具,其好处是直接对Class文件进行检测,也就是直接检测二进制问题,可以直接检测war、jar,还是非常方便的。虽然误报率较高,但是这些检测出来的安全漏洞很多是安全从业人员耳熟能详的…...
【WPF.NET开发】WPF.NET桌面应用开发概述
本文内容 为何从 .NET Framework 升级使用 WPF 进行编程标记和代码隐藏输入和命令控件布局数据绑定图形和动画文本和版式自定义 WPF 应用 Windows Presentation Foundation (WPF) 是一个与分辨率无关的 UI 框架,使用基于矢量的呈现引擎,构建用于利用现…...
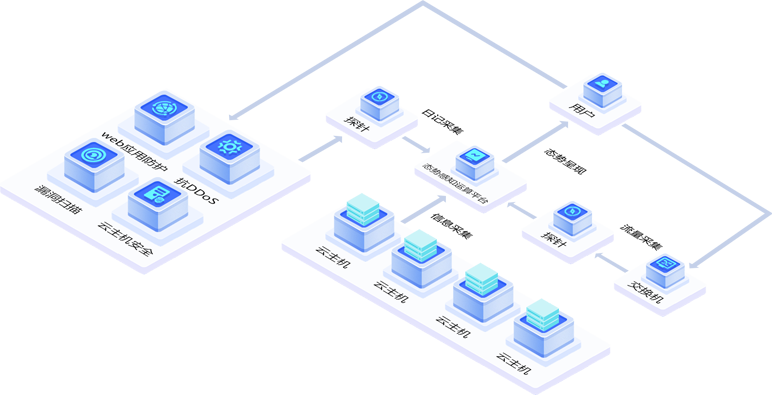
态势感知是什么
在当今高度信息化的时代,信息安全风险已经成为企业、政府和个人的重要关注点。为了有效应对这些风险,态势感知成为了一种日益重要的能力。态势感知是一种基于环境的、动态、整体地洞悉安全风险的能力,是以安全大数据为基础,从全局…...

Spring MVC常用的注解, Controller注解的作用,RequestMapping注解的作用 @ResponseBody注解的作用
文章目录 Spring MVC常用的注解和注解的相关作用Controller注解的作用RequestMapping注解的作用ResponseBody注解的作用PathVariable和RequestParam的区别 Spring MVC常用的注解和注解的相关作用 RequestMapping:用于处理请求 url 映射的注解,可用于类或…...

「Verilog学习笔记」自动贩售机1
专栏前言 本专栏的内容主要是记录本人学习Verilog过程中的一些知识点,刷题网站用的是牛客网 自动贩售机中可能存在的几种金额:0,0.5,1,1.5,2,2.5,3。然后直接将其作为状态机的几种状…...

【大模型】更强的 ChatGLM3-6B 来了,开源可商用
【大模型】更强的 ChatGLM3-6B 来了,开源可商用 简介ChatGLM3-6B 环境配置环境搭建安装依赖 代码及模型权重拉取拉取 ChatGLM3-6B拉取 ChatGLM3-6B 模型权重及代码 终端测试网页测试安装 gradio加载模型并启动服务 参考 简介 ChatGLM3-6B ChatGLM3-6B 是 ChatGLM …...
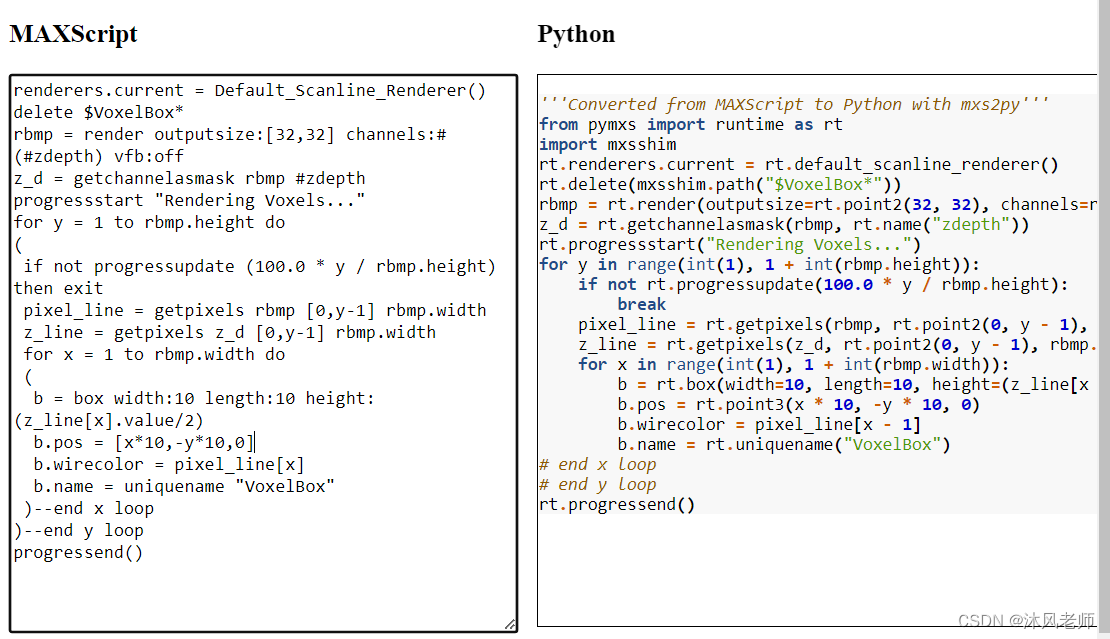
Maxscript到Python转换工具教程
Maxscript到Python转换器教程 Maxscript到Python转换器采用MAXScript程序,将其解析为语法树,然后从语法树中生成等效的Python代码。通过提供python的自动翻译,帮助python程序员理解maxscript示例。 【项目状况】 将正确解析最正确的maxcript…...

Spark_日期参数解析参数-spark.sql.legacy.timeParserPolicy
在Apache Spark中,spark.sql.legacy.timeParserPolicy是一个配置选项,它控制着时间和日期解析策略。此选项主要影响如何解析日期和时间字符串。 在Spark 3.0之前的版本中,日期和时间解析使用java.text.SimpleDateFormat,它在解析…...

OpenAI GPT Image 2文字准确率95%,企业视觉硬核生产力4大核心升级与商业落地路径
GPT Image 2的4大核心升级能力1. 文字渲染准确率接近95%,多语言直出即用过去用AI生图,最头疼的就是文字。写个中文标题,十次有八次是乱码,英文稍微长一点也会出错。而GPT Image 2的文字渲染准确率做到了接近95%,支持中…...
:高级检索架构(解决分块不合理问题))
工业级大模型学习之路012:RAG 零基础入门教程(第七篇):高级检索架构(解决分块不合理问题)
一、为什么分块是 RAG 的 "原罪"1.1 固定大小分块的三大致命缺陷现在使用的固定大小分块(如 512token / 块)是最简单也是最常用的分块方法,但它存在三个无法解决的根本性问题,这也是 90% 的 RAG 系统回答质量差的根源。…...

HPM5361EVK深度测评:480MHz RISC-V MCU性能、外设与低功耗实战
1. 项目概述与核心价值拿到一块新的开发板,尤其是基于RISC-V这类新兴架构的MCU开发板,很多工程师的第一反应往往是:跑个分,点个灯。这没错,但如果我们止步于此,就错过了深入理解一块芯片和其生态潜力的机会…...

杰理之主机插拔U盘,从机较高概率出现无声情况【篇】
switch节点初始丢数据时后续节点状态错误导致时间戳异常问题(对应rx无声)...

开源AI代码助手本地化部署:从Cursor10x看私有化编程助手实践
1. 项目概述:当AI代码助手遇上开源社区如果你是一名开发者,最近可能频繁听到一个词:Cursor。这款集成了强大AI能力的代码编辑器,正以惊人的速度改变着许多人的编程习惯。它不再仅仅是一个文本编辑器,更像是一个能理解你…...

鸿蒙页面代码构建:基于 HarmonyOS 6.0 的跨端开发实战
鸿蒙页面代码构建:基于 HarmonyOS 6.0 的跨端开发实战 前言 随着移动互联网和物联网的深度融合,应用开发正在从单一平台走向跨端、多终端协作的时代。华为鸿蒙操作系统(HarmonyOS)自诞生以来,一直致力于为开发者提供统…...

HTML图片怎么在Firefox中调试对齐_Firefox开发者工具调图方法.txt
连接数爆满主因是线程卡住而非数量多,应重点关注SHOW FULL PROCESSLIST中State非Sleep且Time>60秒的阻塞线程,优先排查应用端连接未释放、监控脚本高频查询及本地进程异常连接。直接看 SHOW PROCESSLIST 里哪些线程在“卡住”连接数爆满&…...
在SI仿真中的正确建模姿势)
从“白点”到模型:用通俗语言拆解玻纤布(如1078)在SI仿真中的正确建模姿势
从“白点”到模型:信号完整性仿真中的玻纤布建模实战指南 在高速PCB设计领域,信号完整性(SI)工程师常常需要面对一个看似微小却影响深远的问题:那些在显微镜下呈现为"白点"的玻璃纤维束,究竟应该…...

独立开发者利用Taotoken Token Plan套餐实现个人项目的长期成本规划
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 独立开发者利用Taotoken Token Plan套餐实现个人项目的长期成本规划 对于独立开发者或小型工作室而言,运营多个集成大语…...

ARM PMU性能监控单元原理与编程实践
1. ARM PMU性能监控基础架构解析 性能监控单元(Performance Monitoring Unit, PMU)是现代处理器微架构中的关键组件,它通过硬件计数器实现对处理器运行时行为的精确测量。在ARMv8/v9架构中,PMU的设计遵循了高度模块化和可扩展的原则,能够支持…...