PaddleClas学习3——使用PPLCNet模型对车辆朝向进行识别(c++)
使用PPLCNet模型对车辆朝向进行识别
- 1 准备环境
- 2 准备模型
- 2.1 模型导出
- 2.2 修改配置文件
- 3 编译
- 3.1 使用CMake生成项目文件
- 3.2 编译
- 3.3 执行
- 3.4 添加后处理程序
- 3.4.1 postprocess.h
- 3.4.2 postprocess.cpp
- 3.4.3 在cls.h中添加函数声明
- 3.4.4 在cls.cpp中添加函数定义
- 3.4.5 在main.cpp中调用
- 4 模型预测
- 4.1 测试结果
- 4.2 与python预测结果对比
1 准备环境
参考上一篇:Windows PaddleSeg c++部署
2 准备模型
2.1 模型导出
对上一篇 使用PPLCNet模型对车辆朝向进行识别 训练得到模型进行转换。将该模型转为 inference 模型只需运行如下命令:
python tools\export_model.py -c .\ppcls\configs\PULC\vehicle_attribute\PPLCNet_x1_0.yaml -o Global.pretrained_model=output/PPLCNet_x1_0/best_model -o Global.save_inference_dir=./deploy/models/class_vehicle_attribute_infer
图2.1 训练得到的模型
图2.2 导出的模型
2.2 修改配置文件
deploy/configs/PULC/vehicle_attribute/inference_vehicle_attribute.yaml
修改Global下的infer_imgs和inference_model_dir。
Global:infer_imgs: "./images/PULC/vehicle_attribute/0002_c002_00030670_0.jpg"inference_model_dir: "./models/class_vehicle_attribute_infer"batch_size: 1use_gpu: Trueenable_mkldnn: Truecpu_num_threads: 10#benchmark: Falseenable_benchmark: Falseuse_fp16: Falseir_optim: Trueuse_tensorrt: Falsegpu_mem: 8000enable_profile: False
3 编译
工程整体目录结构如下:
G:/paddle/c++├── paddle_inference
G:/paddle├── PaddleClas-release-2.5
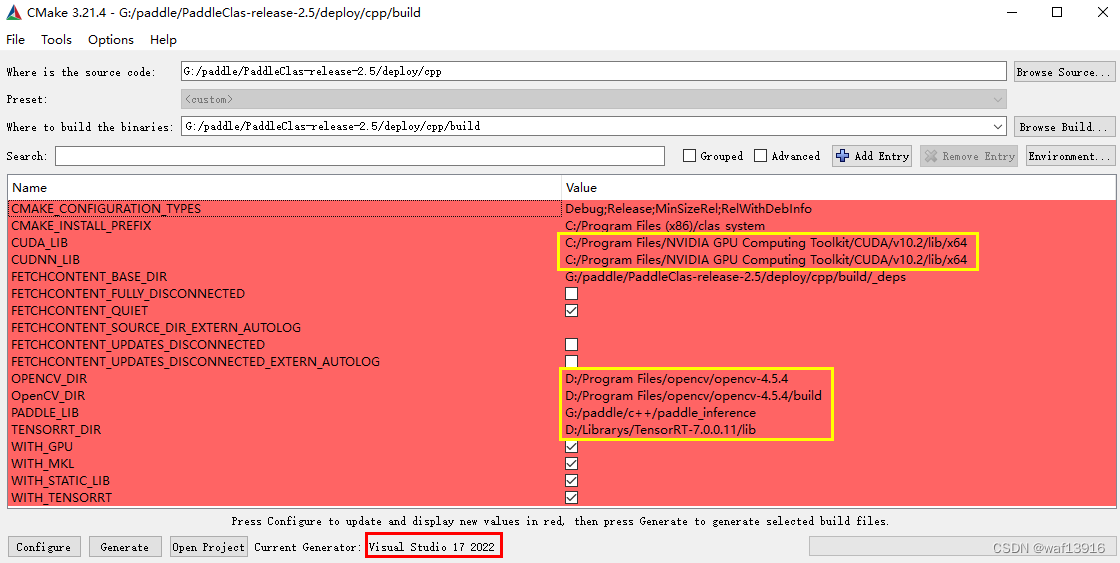
3.1 使用CMake生成项目文件
3.2 编译
用Visual Studio 2022打开cpp\build\clas_system.sln,将编译模式设置为Release,点击生成->生成解决方案,在cpp\build\Release文件夹内生成clas_system.exe。
3.3 执行
进入到build/Release目录下,将准备的模型和图片放到clas_system.exe同级目录,build/Release目录结构如下:
Release
├──clas_system.exe # 可执行文件
├──images # 测试图片├── PULC├── vehicle_attribute├── 0002_c002_00030670_0.jpg
├──configs # 配置文件├── PULC├── vehicle_attribute├── inference_vehicle_attribute.yaml
├──models # 推理用到的模型├── class_vehicle_attribute_infer├── inference.pdmodel # 预测模型的拓扑结构文件├── inference.pdiparams # 预测模型的权重文件└── inference.pdiparams.info # 参数额外信息,一般无需关注
├──*.dll # dll文件
3.4 添加后处理程序
3.4.1 postprocess.h
// postprocess.h
#include <iostream>
#include <vector>namespace PaddleClas {class VehicleAttribute {public:float color_threshold = 0.5;float type_threshold = 0.5;float direction_threshold = 0.5;std::vector<std::string> color_list = { "yellow", "orange", "green", "gray", "red", "blue", "white","golden", "brown", "black" };std::vector<std::string> type_list = { "sedan", "suv", "van", "hatchback", "mpv", "pickup", "bus","truck", "estate" };std::vector<std::string> direction_list = { "forward", "sideward", "backward" };std::string run(std::vector<float>& pred_data);};
}
3.4.2 postprocess.cpp
// postprocess.cpp#include "include/postprocess.h"
#include <string>
namespace PaddleClas {std::string VehicleAttribute::run(std::vector<float>& pred_data) {int color_num = 10;int type_num = 9;int direction_num = 3;int index_color = std::distance(&pred_data[0], std::max_element(&pred_data[0相关文章:
PaddleClas学习3——使用PPLCNet模型对车辆朝向进行识别(c++)
使用PPLCNet模型对车辆朝向进行识别 1 准备环境2 准备模型2.1 模型导出2.2 修改配置文件3 编译3.1 使用CMake生成项目文件3.2 编译3.3 执行3.4 添加后处理程序3.4.1 postprocess.h3.4.2 postprocess.cpp3.4.3 在cls.h中添加函数声明3.4.4 在cls.cpp中添加函数定义3.4.5 在main.…...
学习记录---kubernetes中备份和恢复etcd
一、简介 ETCD是kubernetes的重要组成部分,它主要用于存储kubernetes的所有元数据,我们在kubernetes中的所有资源(node、pod、deployment、service等),如果该组件出现问题,则可能会导致kubernetes无法使用、资源丢失等情况。因此…...

使用单例模式+观察者模式实现参数配置实时更新
使用vector存储观察者列表 #include <iostream> #include <vector> #include <functional> #include <algorithm>// 配置参数结构体 struct MyConfigStruct {int parameter1;std::string parameter2; };class Config { public:using Observer std::f…...

区块链实验室(28) - 拜占庭节点劫持区块链仿真
在以前的FISCO环境中仿真拜占庭节点攻击区块链网络。该环境共有100个节点,采用PBFT作为共识机制,节点编号分别为:Node0,Node,… ,Node99。这100个节点的前2010区块完全相同,自区块2011开始分叉。…...

聊聊AsyncHttpClient的ChannelPool
序 本文主要研究一下AsyncHttpClient的ChannelPool ChannelPool org/asynchttpclient/channel/ChannelPool.java public interface ChannelPool {/*** Add a channel to the pool** param channel an I/O channel* param partitionKey a key used to retrieve the cac…...
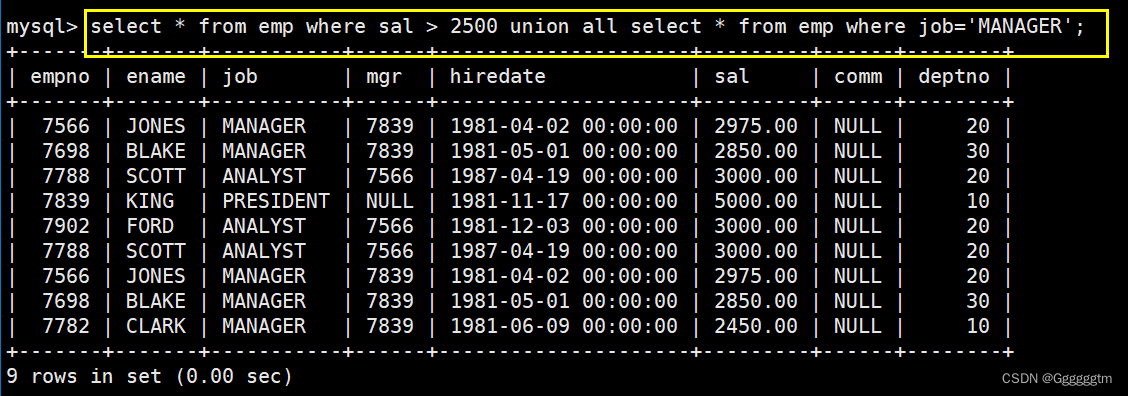
[MySQL] MySQL复合查询(多表查询、子查询)
前面我们学习了MySQL简单的单表查询。但是我们发现,在很多情况下单表查询并不能很好的满足我们的查询需求。本篇文章会重点讲解MySQL中的多表查询、子查询和一些复杂查询。希望本篇文章会对你有所帮助。 文章目录 一、基本查询回顾 二、多表查询 2、1 笛卡尔积 2、2…...

[架构之路-256]:目标系统 - 设计方法 - 软件工程 - 软件设计 - 架构设计 - 软件系统不同层次的复用与软件系统向越来越复杂的方向聚合
目录 前言: 一、CPU寄存器级的复用:CPU寄存器 二、指令级复用:二进制指令 三、过程级复用:汇编语言 四、函数级复用:C语言 五、对象级复用:C, Java, Python 六、组件级复用 七、服务级复用 八、微…...

C++初学教程三
目录 一、运算符 一、自增自减运算符 二、位运算符 三、关系运算符...

雷达点云数据.pcd格式转.bin格式
雷达点云数据.pcd格式转.bin格式 注意,方法1原则上可行,但是本人没整好pypcd的环境 方法2是绝对可以的。 方法1 1 源码如下: def pcb2bin1(): # save as bin formatimport os# import pypcdfrom pypcd import pypcdimport numpy as np…...

Fiddler抓包测试
模拟弱网测试 操作:一、Rules - Customize Rules (快捷键CtrlR)弹出编辑器 二、接着CtrlF查找m_SimulateModem标志位 三、默认上传300ms,下载150ms 四、更改后,继续Rules - Performances - Simulate Modem Speeds勾上 …...

视频处理关键知识
1 引言 视频技术发展到现在已经有100多年的历史,虽然比照相技术历史时间短,但在过去很长一段时间之内都是最重要的媒体。由于互联网在新世纪的崛起,使得传统的媒体技术有了更好的发展平台,应运而生了新的多媒体技术。而多媒体技术…...

LeetCode435. Non-overlapping Intervals
文章目录 一、题目二、题解 一、题目 Given an array of intervals intervals where intervals[i] [starti, endi], return the minimum number of intervals you need to remove to make the rest of the intervals non-overlapping. Example 1: Input: intervals [[1,2]…...

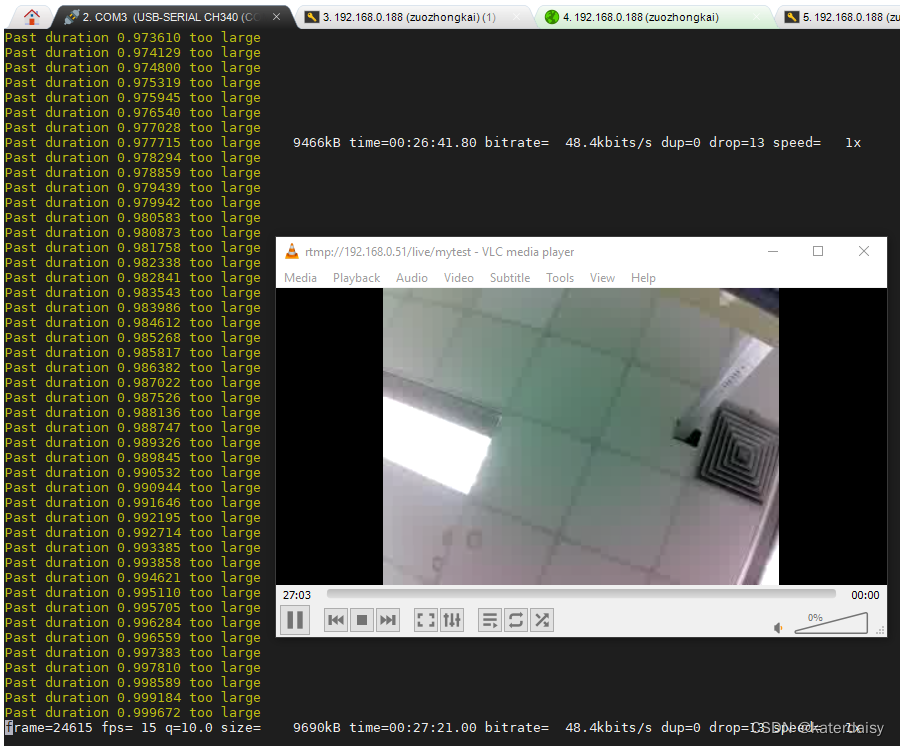
ffmpeg 实现多视频轨录制到同一个文件
引言 在视频录制中,有时会碰到这样一个需求,将不同摄像头的画面写入到一个视频文件,这个叫法很多,有的厂家叫合流模式,有的叫多画面多流模式。无论如何,它们的实质都是在一个视频文件上实现多路不同分辨率视…...

vue3中子组件调用父组件的方法
<script lang"ts" setup>前提 父组件: 子组件: const emit defineEmits([closeson]) 在子组件的方法中使用: emit(closeson)...

使用OkHttp上传本地图片及参数
下面以一个例子来讲解在项目中如何使用OKHttp来对本地图片做个最简单的上传功能,基本上无封装,只需要简单调用便可(对于OKHttp的引入不再单独做介绍)。 1:构建上传图片附带的参数(params) Map…...
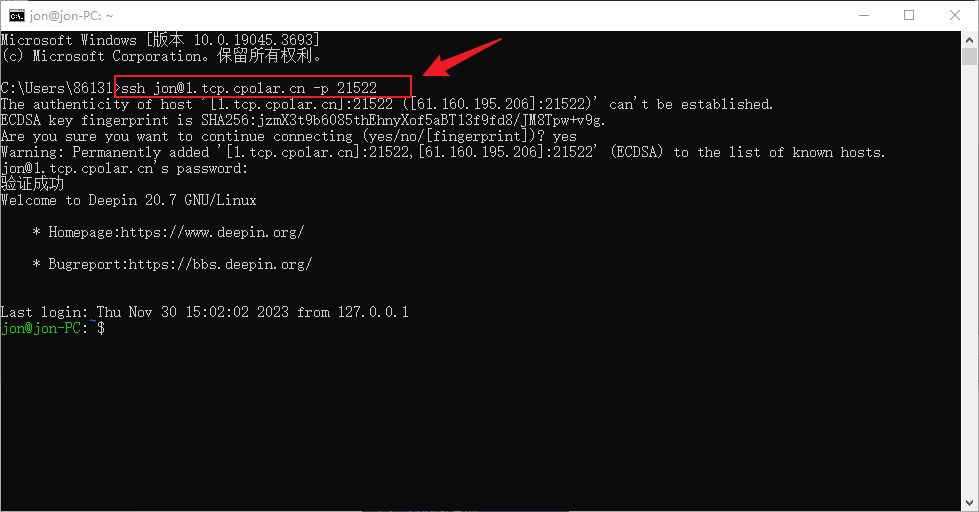
无公网IP环境如何SSH远程连接Deepin操作系统
文章目录 前言1. 开启SSH服务2. Deppin安装Cpolar3. 配置ssh公网地址4. 公网远程SSH连接5. 固定连接SSH公网地址6. SSH固定地址连接测试 前言 Deepin操作系统是一个基于Debian的Linux操作系统,专注于使用者对日常办公、学习、生活和娱乐的操作体验的极致࿰…...
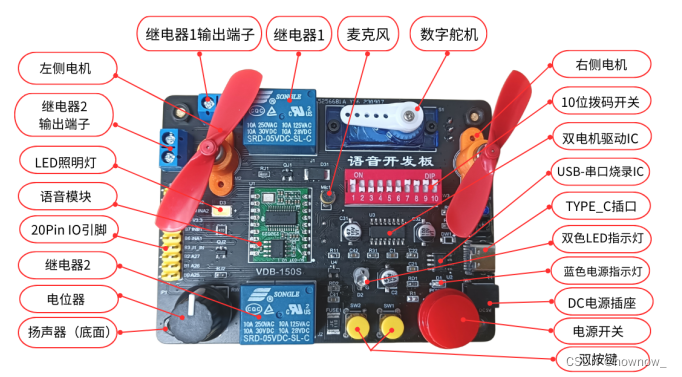
不会代码(零基础)学语音开发(语音控制板载双继电器)
继电器的用途可广了,这个语音控制用处也特别广。继电器,它实际上是一种“自动开关”,用小电流去控制大电流运作,在电路中起着自动调节、安全保护、转换电路等作用。 在日常生活中,你插入汽车钥匙,车辆可以…...
在imx6ull中加入ov5640模块
本来觉得是一件很简单的事情但是走了很多的弯路,记录一下调试过程。 先使用正点原子提供的出厂内核把摄像头影像调试出来,然后cat /dev/video1,看一下video1牵扯到哪些模块,可以看到需要ov5640_camera.ko和 mx6s_capture.ko这两个…...
Kafka中的auto-offset-reset配置
Kafka这个服务在启动时会依赖于Zookeeper,Kafka相关的部分数据也会存储在Zookeeper中。如果kafka或者Zookeeper中存在脏数据的话(即错误数据),这个时候虽然生产者可以正常生产消息,但是消费者会出现无法正常消费消息的…...

TCP/IP_整理起因
先分享一个初级的问题;有个客户现场,终端设备使用客户网络更新很慢,使用手机热点更新速度符合预期;网络部署情况如下: 前期花费了很大的精力进行问题排查对比,怀疑是客户网络问题(其他的客户现…...

多维子集和问题:NP难问题的算法与应用解析
1. 多维子集和问题概述多维子集和问题(Multi-dimensional Subset Sum Problem)是计算复杂度理论中的经典NP难问题。简单来说,它要求在给定的n维向量集合中,找出一个子集,使得该子集中所有向量在每一维上的和恰好等于目标向量对应的分量。这个…...

机械臂时间冲击最优轨迹规划【附代码】
✨ 长期致力于串联机械臂、时间-冲击最优、轨迹规划、多目标粒子群算法、非支配排序遗传算法研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)构建基于…...

容器化技术实战:从Docker到Kubernetes的体系化学习路径
1. 项目概述:一个容器化时代的“瑞士军刀”训练营 如果你正在或即将踏入容器化技术领域,无论是刚接触Docker的新手,还是想系统梳理Kubernetes的开发者,又或者是需要为团队进行技术培训的架构师,那么“jpetazzo/contai…...

【Midjourney极简艺术风格终极指南】:20年视觉设计专家亲授3大构图法则、5类禁用提示词与1套可复用Prompt模板
更多请点击: https://intelliparadigm.com 第一章:极简艺术风格的本质与Midjourney适配原理 极简艺术风格并非简单地“减少元素”,而是通过精准的留白、克制的色彩、几何化的形态与高度凝练的视觉语法,实现信息密度与情绪张力的平…...

开源流程编排引擎FlowCue:基于DAG与事件驱动的自动化工作流实践
1. 项目概述:FlowCue是什么,以及它为何值得关注如果你是一名开发者,尤其是经常和API、数据流、自动化任务打交道的后端或全栈工程师,那么你肯定对“流程编排”这个概念不陌生。简单来说,就是把一系列独立的操作&#x…...

AI如何学习科学品味:从多模态特征到科研评估系统构建
1. 项目概述:当AI开始学习“科学品味” 最近在GitHub上看到一个挺有意思的项目,叫“AI-Can-Learn-Scientific-Taste”。光看名字,你可能觉得这又是一个关于AI模型训练或者科学计算的常规项目。但点进去仔细琢磨,你会发现它的野心远…...

CircuitPython嵌入式开发实战:从GPIO到音频输出的完整指南
1. CircuitPython嵌入式开发入门:从GPIO到音频的实战指南如果你刚拿到一块Adafruit的开发板,刷好了CircuitPython,看着板子上那些密密麻麻的引脚,是不是既兴奋又有点无从下手?别担心,几乎所有嵌入式开发者都…...

2026年十大最佳地区搜索排名优化工具:权威榜单赋能企业高效增长
本文全面梳理了2026年十大主流地区搜索排名优化工具的核心功能与应用价值,旨在为本地企业提供客观、实用的选型参考。通过对各工具地域关键词布局、多平台同步能力及实时数据监控等关键模块的解析,结合具体参数指标与套餐定价,系统呈现不同场…...

2026年好用的图片去水印工具有哪些?图片去水印工具推荐盘点
2026年好用的图片去水印工具有哪些?图片去水印工具推荐盘点 说实话,水印虽然能保护原创,但有时候我们也需要对自己拍摄或拥有版权的图片进行处理。比如拍了张好看的图,却被平台的logo挡住了关键部分;或者想要把多个平…...

Chrome QRCode插件终极指南:如何在3分钟内实现跨设备无缝内容同步
Chrome QRCode插件终极指南:如何在3分钟内实现跨设备无缝内容同步 【免费下载链接】chrome-qrcode :zap: A Chrome plugin to Genrate QRCode of URL / Text, or Decode the QRcode in website. 一个Chrome浏览器插件,用于生成当前URL或者选中内容的二维…...