自动驾驶学习笔记(十三)——感知基础
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往:
《自动驾驶新人之旅》免费课程—> 传送门
《Apollo Beta宣讲和线下沙龙》免费报名—>传送门
文章目录
前言
传感器
测距原理
坐标系
标定
同步
融合
部署
总结
前言
见《自动驾驶学习笔记(八)——路线规划》
见《自动驾驶学习笔记(九)——车辆控制》
见《自动驾驶学习笔记(十)——Cyber通信》
见《自动驾驶学习笔记(十一)——高精地图》
见《自动驾驶学习笔记(十二)——定位技术》
传感器
相机、毫米波雷达、激光雷达和超声波雷达这几种传感器的性能对比如下图:

事件相机是近年出现的新型应用,事件相机只观测场景中的“运动”,确切地说是观察场景中的“亮度的变化”。event camera只会在有亮度变化时,输出对应pixel的亮度变化(1或0),具有响应快、动态范围宽、无motion blur等优势,其成像结果如下图所示:

测距原理
时间飞行法(TOF)是主流方案,通过脉冲在目标与雷达之间的飞行时间差计算距离。优势:原理简单,技术及产业链成熟探测距离长,响应快。劣势:计时器精确度要求高,易受环境影响雷达间串扰。
调频连续波法(FMCW)是主流替代方案,通过多普勒效应测量频率差。优势:信噪比高,分辨率高,速度信息,可编码,抗雷达互扰,功耗低,人眼安全。劣势:前沿技术,成熟方案少,产业链初期。

三角测量法,通过将光源与相机配对来捕获三维测量数据。优势:结构简单、测量速度快、具有实时处理能力、使用灵活、适应力强。劣势:在精度以及分辨率上仍然有不足。

坐标系
自动驾驶中各个坐标系的应用如下图所示:
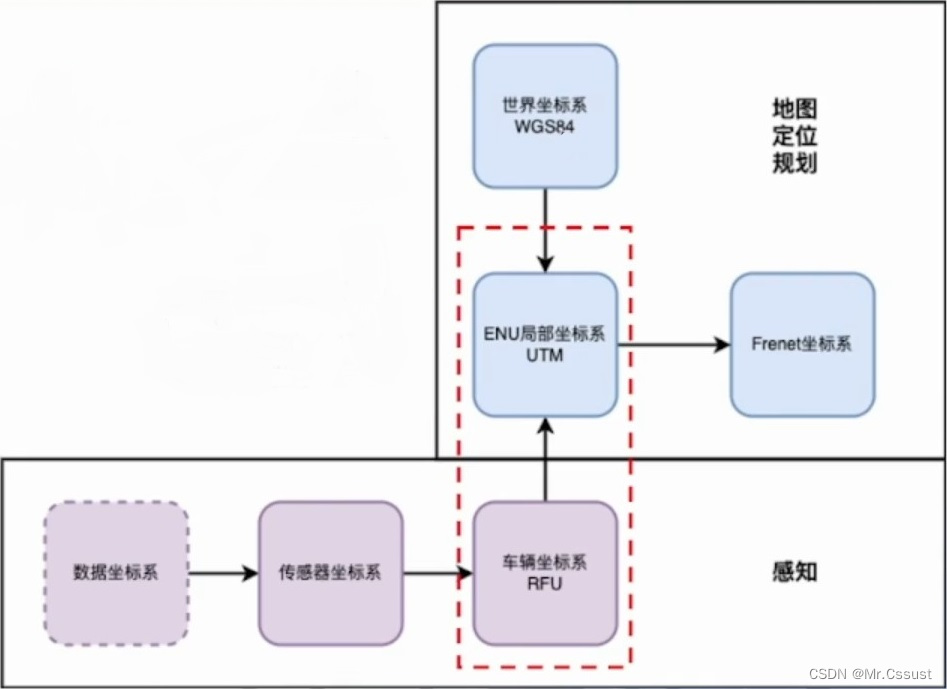
数据坐标系:根据传感器原理不同,每种传感器都会有自己的数据坐标系,如相机将三维世界中的坐标点映射到二维图像平面的像素坐标系。
传感器坐标系:以传感器为中心的三维笛卡尔坐标系。
车辆坐标系:Apollo中采用右-前-天定义。原点:后轴中心为坐标系中点。X:面向车辆前方,右手方向为正。Y:车辆前进方向为正。Z:垂直地面,车顶方向为正。

EUN坐标系的原点在地球表面,x和y轴在当地水平面内,分别指向东和北,z轴朝上,在局部范围不是很大的情况,比如几十km内,我们认为每一个原点的东北天坐标系是平行的。
UTM投影坐标系全称为“通用横轴墨卡托投影”UNIVERSAL TRANSVERSE MERCATOR PROJECTION,是种“等角横轴割圆柱投影”,圆柱割地球于南纬80度、北纬84度两条等高圈,投影后两条相割的经线上没有变形,而中央经线上长度比0.9996。该投影方法按经度分为60个带,每带6度,从西经180度起算。如下图所示为全球的UTM投影,北京所在的区域在第50个投影带上。每个投影带上的一个坐标(x,y,z)可以唯-地表示地球上一个点,高度使用WGS84坐标系统中的大地高度。
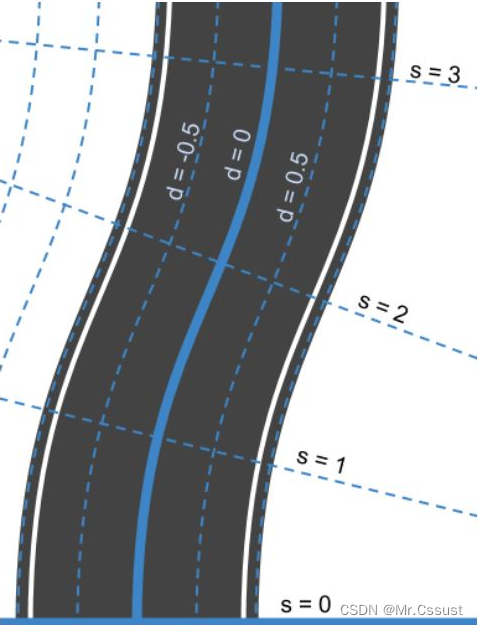
Frenet坐标系下,车辆运动可以分解为沿中心线运动和垂直于道路中心线运动两个部分。因此,我们可以使用变量 s和d描述车辆在道路上的位置。s坐标表示沿道路的距离(也称为纵向位移),d坐标表示道路上的左右位置(也称为横向位移)。
标定
传感器标定的目的即是把感知到的周围环境统一到车身坐标系下。
不同模型的传感器后造成不同的数据畸变,例如:小孔模型( Pinhole ),全向相机( Onknidirectional )。畸形的数据如下图所示:
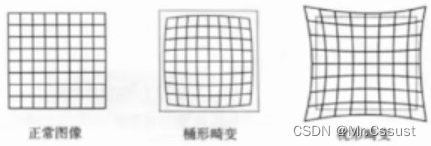
去畸变:校正光线在经过透镜边缘后发生弯折,造成的图像边缘弯曲。
内参标定:图像坐标系到相机坐标系的映射,供应商可提供,或者通过棋盘标定板测定
外参标定:传感器相对于车身或其他传感器坐标系的位姿Rt
同步
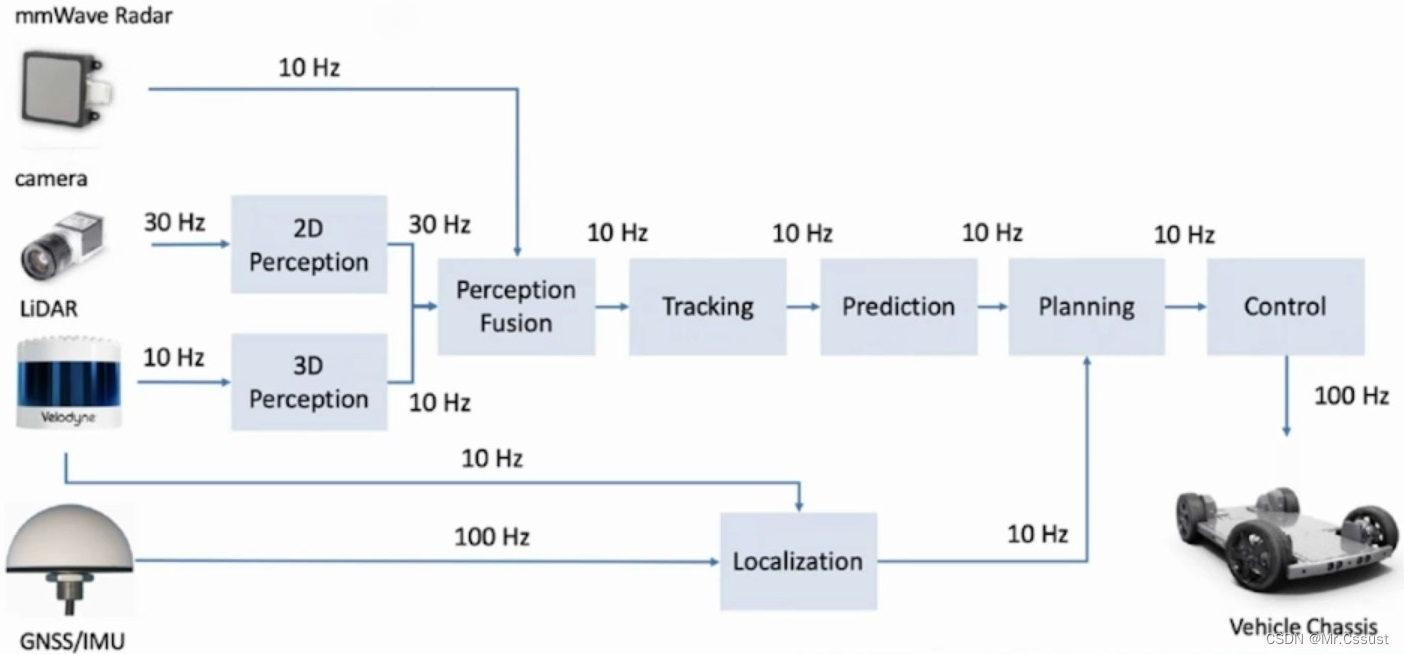
各个传感器采样的频率不一致,还需要同步到一个节拍上来使用,如下图所示:
融合
融合是将多传感器检测到的目标在时间和空何两个尺度上达成同一。
时间:每个传感器的频率不一致,如LiDAR是10Hz,Camera是30Hz,Radar是10Hz。
空间:各传感器的感知结果投影到车身坐标系。
融合的的策略有三种,如下图所示:

前融合:原始信号融合,一般用于同类传感器融合,原始信息不损失,计算量大,融合难度大。
特征融合:传感器信号进行独立特征提取后进行融合,最近比较流行BEV。
后融合:每种传感器独立进行感知检测,在结果层进行融合,原始信息损失较大,计算量小,难度低。
部署
不同的自动驾驶功能,应用的传感器部署方案如下图所示:
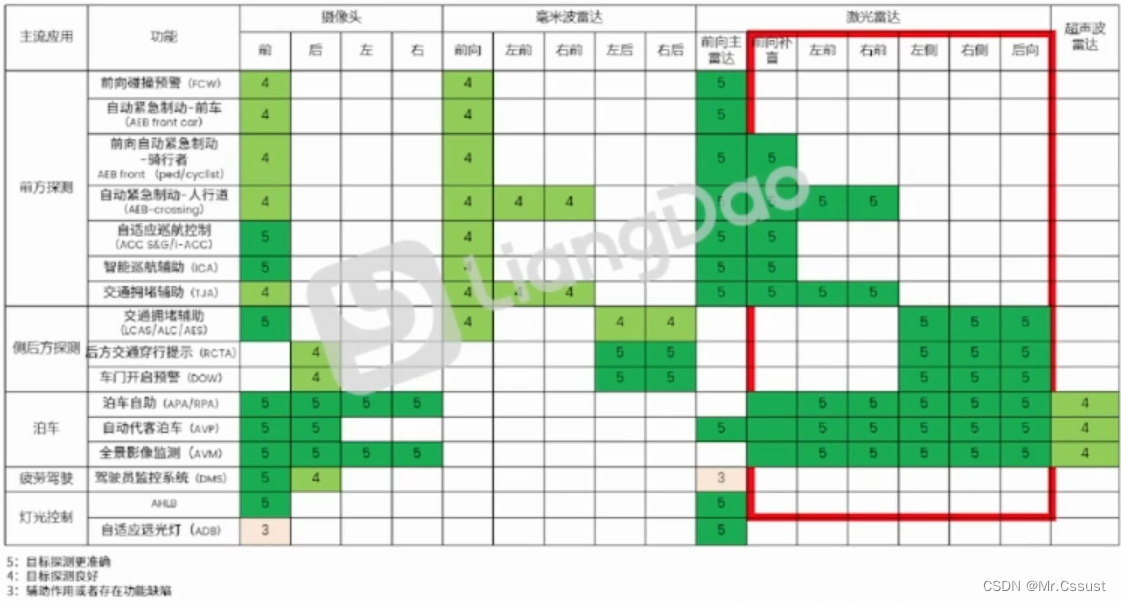
外资车企的感知部署方案:

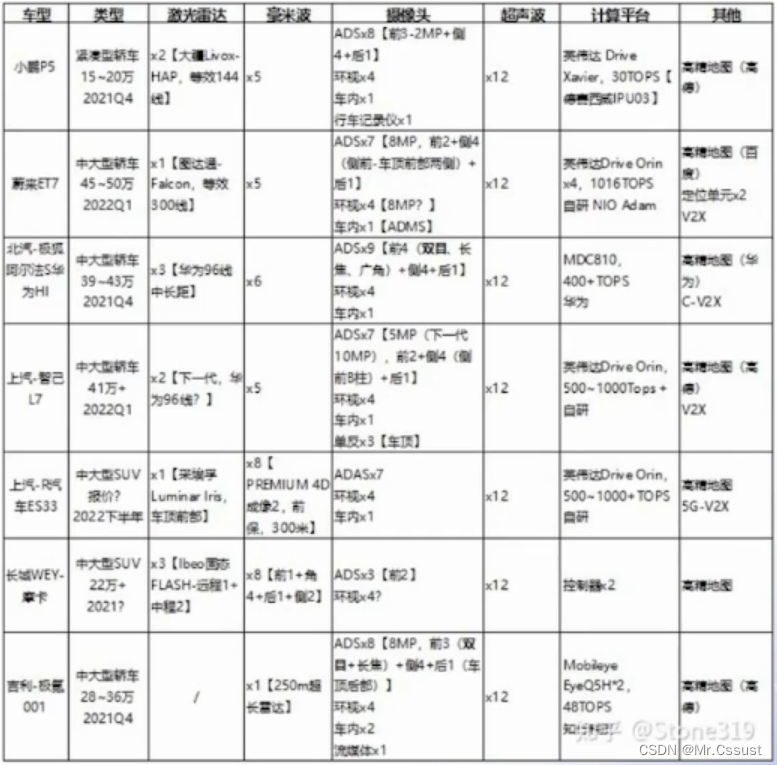
自主品牌车企的感知部署方案:
总结
以上就是本人在学习自动驾驶时,对所学课程的一些梳理和总结。后续还会分享另更多自动驾驶相关知识,欢迎评论区留言、点赞、收藏和关注,这些鼓励和支持都将成文本人持续分享的动力。
另外,如果有同在小伙伴,也正在学习或打算学习自动驾驶时,可以和我一同抱团学习,交流技术。
版权声明,原创文章,转载和引用请注明出处和链接,侵权必究!
文中部分图片来源自网络,若有侵权,联系立删。
相关文章:
自动驾驶学习笔记(十三)——感知基础
#Apollo开发者# 学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往: 《自动驾驶新人之旅》免费课程—> 传送门 《Apollo Beta宣讲和线下沙龙》免费报名—>传送门 文章目录 前言 传感器 测距原理 坐标系 标定 同…...
WLAN配置实验
本文记录了WLAN配置实践的过程,该操作在华为HCIA中属于相对较复杂的实验,记录过程备忘。这里不就WLAN原理解释,仅进行配置实践,可以作为学习原理时候的参考。本文使用华为ENSP进行仿真。实验拓扑图如下: 1.WLAN工作流程…...

java_web接收前端传的excel文件读取数据
#本次做一个将患者数据导入到某个模块的功能,前期集成的代码时不时出现异常,本次进行修改记录 //controller层/*** 导入患者数据*/RejectReplayRequestPostMapping("/importData")public Result<?> importData(HttpServletRequest req…...

在Vue开发中v-if指令和v-show指令的使用介绍和区别及使用场景
一、条件渲染 v-if v-if 指令用于条件性地渲染一块内容。这块内容只会在指令的表达式返回真值时才被渲染。 <h1 v-if"awesome">Vue is awesome!</h1>v-else 你也可以使用 v-else 为 v-if 添加一个“else 区块”。 <h1 v-if"awesome"&g…...

Power Query是啥
Power Query是一种用于数据获取、转换和整理的功能强大的工具,它是Microsoft Excel和Power BI中的一个组件。Power Query可以帮助用户从各种数据源中获取数据,并进行数据清洗、转换和整理,以便进一步分析和可视化。 使用Power Query…...

在k8s中部署nfs-client-provisioner
1、部署过程 1.1、环境依赖 在部署nfs-client-provisioner之前,需要先部署nfs服务。 因为,nfs-client-provisioner创建的pv都是要在nfs服务器中搭建的。 本示例中的nfs server的地址如下: [rootnode1 /]# showmount -e Export list for …...

23.12.10日总结
周总结 这周三的晚自习,学姐讲了一下git的合作开发,还有懒加载,防抖,节流 答辩的时候问了几个问题: 为什么在js中0.10.2!0.3? 在js中进行属性运算时,会出现0.10.20.300000000000000004js遵循IEEE754标…...
持续集成交付CICD:通过API方式上传Nexus制品
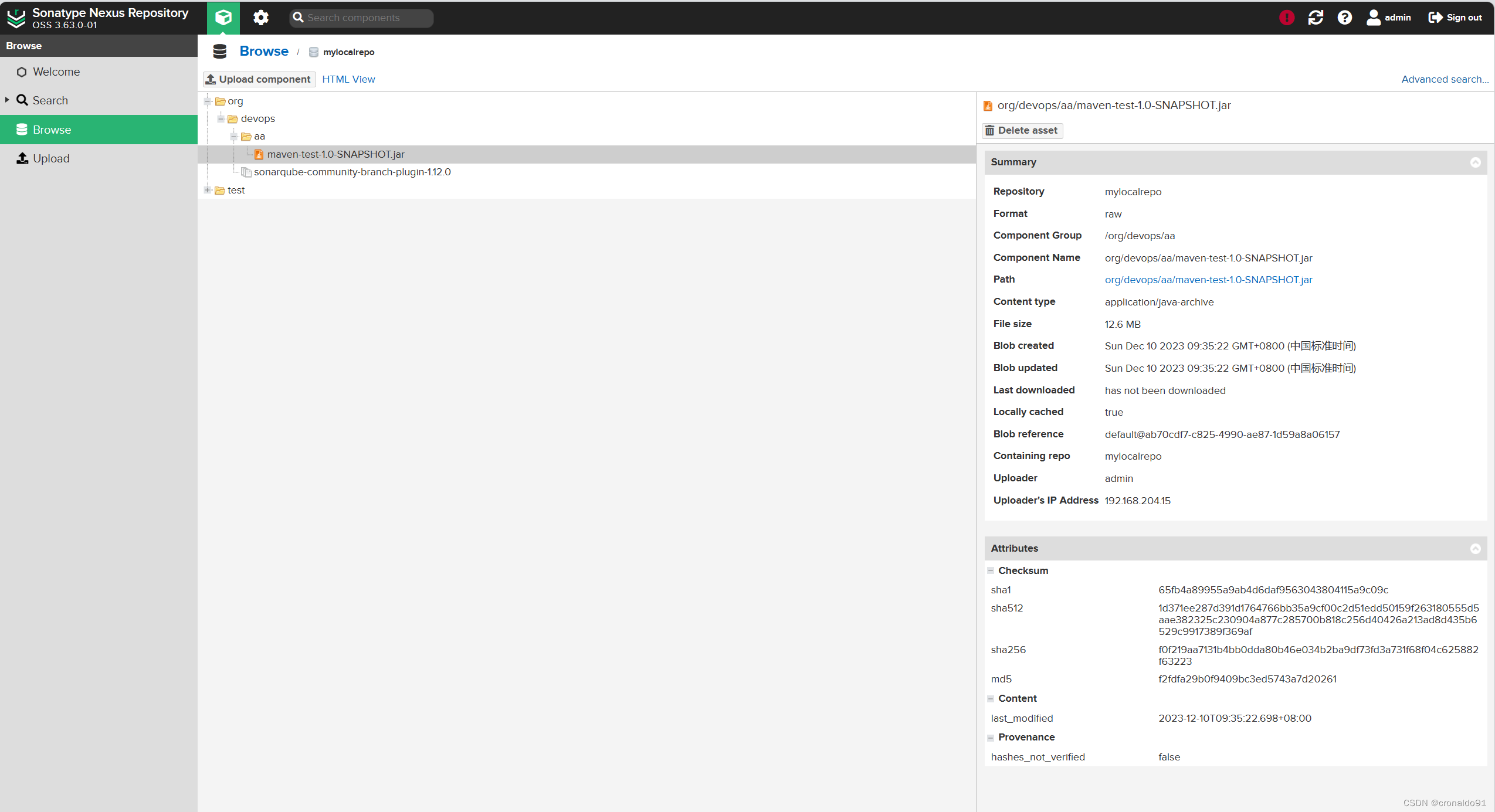
目录 一、实验 1.通过API方式上传Nexus制品 二、问题 1.如何通过API方式上传PNG图片 2.如何通过API方式上传tar.gz 与 ZIP文件 3.如何通过API方式上传Jar file文件 4.如何通过API方式上传制品(maven类型的制品)文件 5.如何下载制品 一、实验 1.通…...

Hadoop学习笔记(HDP)-Part.14 安装YARN+MR
目录 Part.01 关于HDP Part.02 核心组件原理 Part.03 资源规划 Part.04 基础环境配置 Part.05 Yum源配置 Part.06 安装OracleJDK Part.07 安装MySQL Part.08 部署Ambari集群 Part.09 安装OpenLDAP Part.10 创建集群 Part.11 安装Kerberos Part.12 安装HDFS Part.13 安装Ranger …...
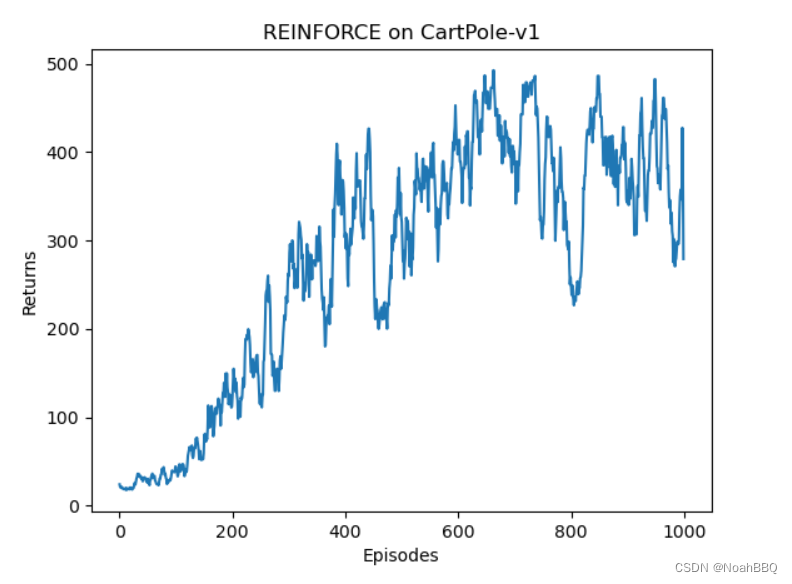
reinforce 跑 CartPole-v1
gym版本是0.26.1 CartPole-v1的详细信息,点链接里看就行了。 修改了下动手深度强化学习对应的代码。 然后这里 J ( θ ) J(\theta) J(θ)梯度上升更新的公式是用的不严谨的,这个和王树森书里讲的严谨公式有点区别。 代码 import gym import torch from …...
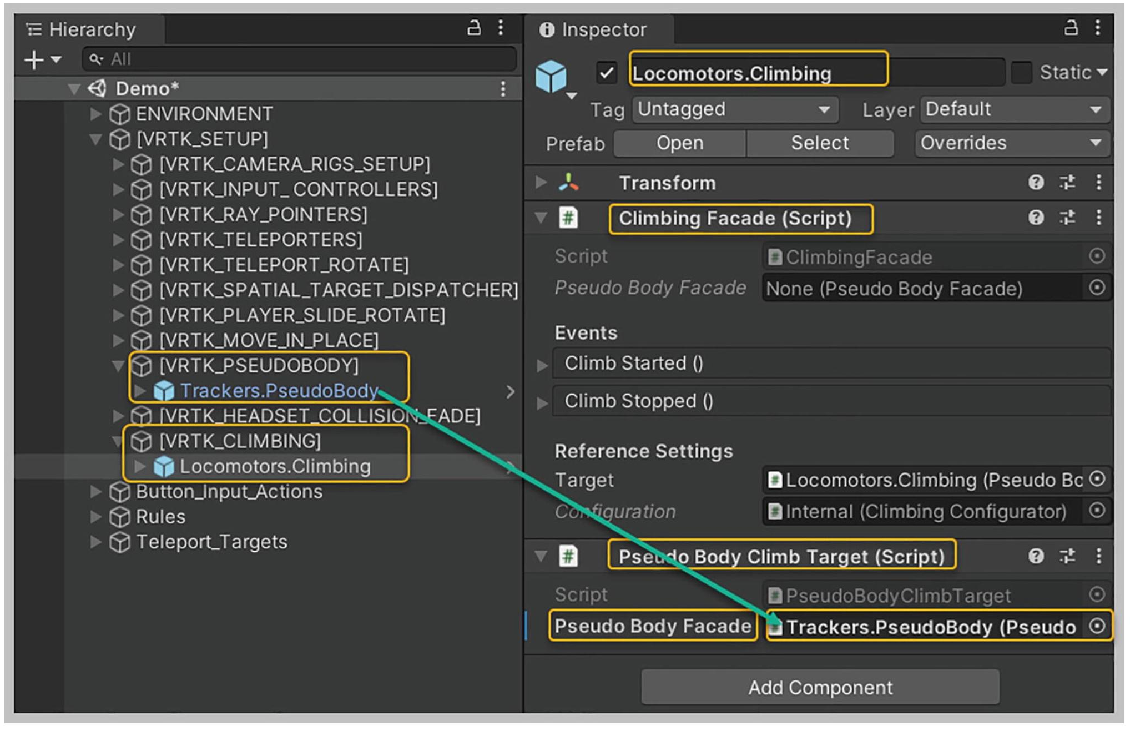
【VRTK】【VR开发】【Unity】13-攀爬
课程配套学习资源下载 https://download.csdn.net/download/weixin_41697242/88485426?spm=1001.2014.3001.5503 【概述】 VRTK提供两个预制件实现攀爬 Climbing Controller,用于控制Player的物理义体Climbable Interactable,用于设置可攀爬对象【设置Climbing Controller…...
)
华为OD机试真题-求幸存数之和-2023年OD统一考试(C卷)
题目描述: 给一个正整数列 nums,一个跳数 jump,及幸存数量 left。运算过程为:从索引为0的位置开始向后跳,中间跳过 J 个数字,命中索引为J1的数字,该数被敲出,并从该点起跳ÿ…...

python pyaudio实时读取音频数据并展示波形图
python pyaudio实时读取音频数据并展示波形图 下面代码可以驱动电脑接受声音数据,并实时展示音波图: import numpy as np import matplotlib.pyplot as plt import matplotlib.animation as animation import pyaudio import wave import os import op…...

【算法系列篇】递归、搜索和回溯(二)
文章目录 前言1. 两两交换链表中的节点1.1 题目要求1.2 做题思路1.3 代码实现 2. Pow(X,N)2.1 题目要求2.2 做题思路2.3 代码实现 3. 计算布尔二叉树的值3.1 题目要求3.2 做题思路3.3 代码实现 4. 求根节点到叶结点数字之和4.1 题目要求4.2 做题思路4.3 代码实现 前言 前面为大…...

Ubuntu下安装SDL
源码下载地址(SDL version 2.0.14):https://www.libsdl.org/release/SDL2-2.0.14.tar.gz 将源码包拷贝到系统里 使用命令解压 tar -zxvf SDL2-2.0.14.tar.gz 解压得到文件夹 SDL2-2.0.14 进入文件夹 执行命令 ./configure 执行命令 make…...

创建vue项目:vue脚手架安装、vue-cli安装,vue ui界面创建vue工程(vue2/vue3),安装vue、搭建vue项目开发环境(保姆级教程二)
今天讲解 Windows 如何利用脚手架创建 vue 工程,以及 vue ui 图形化界面搭建 vue 开发环境,这是这个系列的第二章,有什么问题请留言,请点赞收藏!!! 文章目录 1、安装vue-cli脚手架2、vue ui创建…...
【3】密评-物理和环境安全测评
0x01 依据 GB/T 39786 -2021《信息安全技术 信息系统密码应用基本要求》针对等保三级系统要求: 物理和环境层面: a)宜采用密码技术进行物理访问身份鉴别,保证重要区域进入人员身份的真实性; b)宜采用密码技术保证电子门…...

笨爸爸工房,我们在校园|“小鲁班”,铸未来
为了响应国家号召,将劳动教育课程真正实现融入校园生活,笨爸爸工房已与洛阳市西下池小学、洛阳市第一实验小学西工校区、洛阳市西工区第二实验小学、洛阳第二外国语学校(兰溪校区)、洛阳市睿源幼儿园,这4所学校及1家幼…...

RPC 集群,gRPC 广播和组播
一、集群抽象:cluster 它是指我们在调用远程的时候,尝试解决: 1、failover:即引入重试功能,但是重试的时候会换一个新节点 2、failfast: 立刻失败,不需要重试 3、广播:将请求发送到所有的节点上 4、组…...
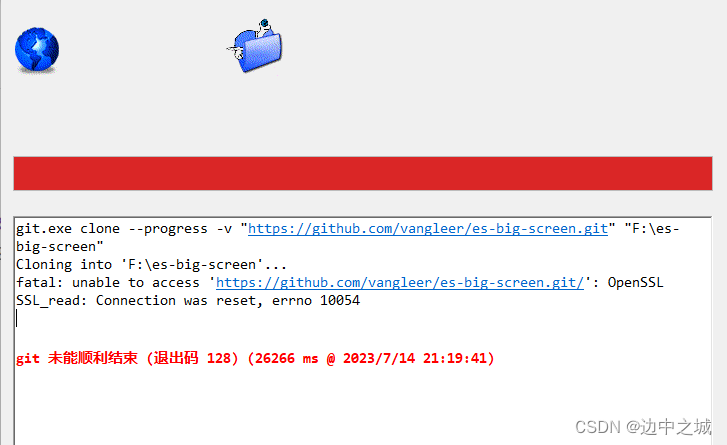
OpenSSL SSL_read: Connection was reset, errno 10054
fatal: unable to access ‘https://github.com/vangleer/es-big-screen.git/’: OpenSSL SSL_read: Connection was reset, errno 10054 解决方法:git config --global http.sslVerify “false” 参考链接: https://github.com/Kong/insomnia/issues/2…...

丙级管道井防火门:规范要求、参数标准与工程应用要点
高层建筑消防体系中,管道井、电缆井属于贯穿整栋建筑的竖向竖井,是火势垂直蔓延的高危通道。根据《建筑设计防火规范》及新版《建筑防火通用规范》要求,建筑各类竖向管道井、强弱电井的检查检修门,必须统一采用丙级防火门…...

Perseus:5分钟解锁碧蓝航线全皮肤的神奇补丁
Perseus:5分钟解锁碧蓝航线全皮肤的神奇补丁 【免费下载链接】Perseus Azur Lane scripts patcher. 项目地址: https://gitcode.com/gh_mirrors/pers/Perseus 还在为碧蓝航线中那些精美皮肤需要付费而烦恼吗?想免费体验所有舰娘的不同外观吗&…...

Udemy课程下载器:如何高效离线学习Udemy课程内容?
Udemy课程下载器:如何高效离线学习Udemy课程内容? 【免费下载链接】udemy-downloader-gui A desktop application for downloading Udemy Courses 项目地址: https://gitcode.com/gh_mirrors/ud/udemy-downloader-gui 想要随时随地学习Udemy课程却…...

技术人如何找到自己的“甜蜜点”?一个四象限模型帮你定位
在软件测试这条“越走越深”的路上,每个从业者早晚都会撞上一堵墙——技能焦虑。自动化框架层出不穷,性能工具日新月异,安全左移、精准测试、AI 辅助……每一样看起来都很重要,每一样又都学不完。于是有人拼命考证,有人…...

Unity组件化通信三层次:事件、接口与消息总线实战
1. 这不是“写个脚本就完事”的游戏逻辑——为什么90%的Unity新手在交互设计上栽在第一步你有没有试过这样写:PlayerController里直接调用EnemyHealth.TakeDamage(10),EnemyAI里又反过来调用PlayerStats.GetHealth()?代码跑通了,测…...

3个核心优势:MultiHighlight如何成为你的智能代码分析工具?
3个核心优势:MultiHighlight如何成为你的智能代码分析工具? 【免费下载链接】MultiHighlight Jetbrains IDE plugin: highlight identifiers with custom colors 🎨💡 项目地址: https://gitcode.com/gh_mirrors/mu/MultiHighli…...
)
2026实测|5款AI论文写作软件深度对比(含降重/AIGC检测/价格)
根据2026年最新的实测数据,我为你整理了一份好用的AI论文写作软件清单,按适用场景分类,你可以根据自己的需求快速匹配。 📊 核心工具速览对比 工具名称核心优势最佳适用场景价格参考推荐指数PaperRed中文全流程、降重合规、文献真…...

显卡驱动清理终极指南:Display Driver Uninstaller专业使用教程
显卡驱动清理终极指南:Display Driver Uninstaller专业使用教程 【免费下载链接】display-drivers-uninstaller Display Driver Uninstaller (DDU) a driver removal utility / cleaner utility 项目地址: https://gitcode.com/gh_mirrors/di/display-drivers-uni…...

Sub-Zero性能优化:7个技巧让你的Plex字幕运行如飞
Sub-Zero性能优化:7个技巧让你的Plex字幕运行如飞 【免费下载链接】Sub-Zero.bundle Subtitles for Plex, as good you would expect them to be. 项目地址: https://gitcode.com/gh_mirrors/su/Sub-Zero.bundle Sub-Zero是Plex媒体服务器最强大的字幕插件之…...

Sunshine游戏串流服务器:如何5分钟内搭建私人云游戏平台?
Sunshine游戏串流服务器:如何5分钟内搭建私人云游戏平台? 【免费下载链接】Sunshine Self-hosted game stream host for Moonlight. 项目地址: https://gitcode.com/GitHub_Trending/su/Sunshine 想象一下,将你的高性能游戏PC变成一个…...