OpenCV极坐标变换函数warpPolar的使用
学更好的别人,
做更好的自己。
——《微卡智享》

本文长度为1702字,预计阅读4分钟
前言
前阵子在做方案时,得了几张骨钉的图片,骨科耗材批号效期管理一直是比较麻烦的,贴RFID标签成本太高,所以一般考虑还是OCR的识别比较好,因为本身骨钉的字符是按圆印上去的,直接截取图片进行OCR没法识别,需要经过图像处理后再识别,所以这篇就是学习一下OpenCV的极坐标变换函数。

实现效果

源图像
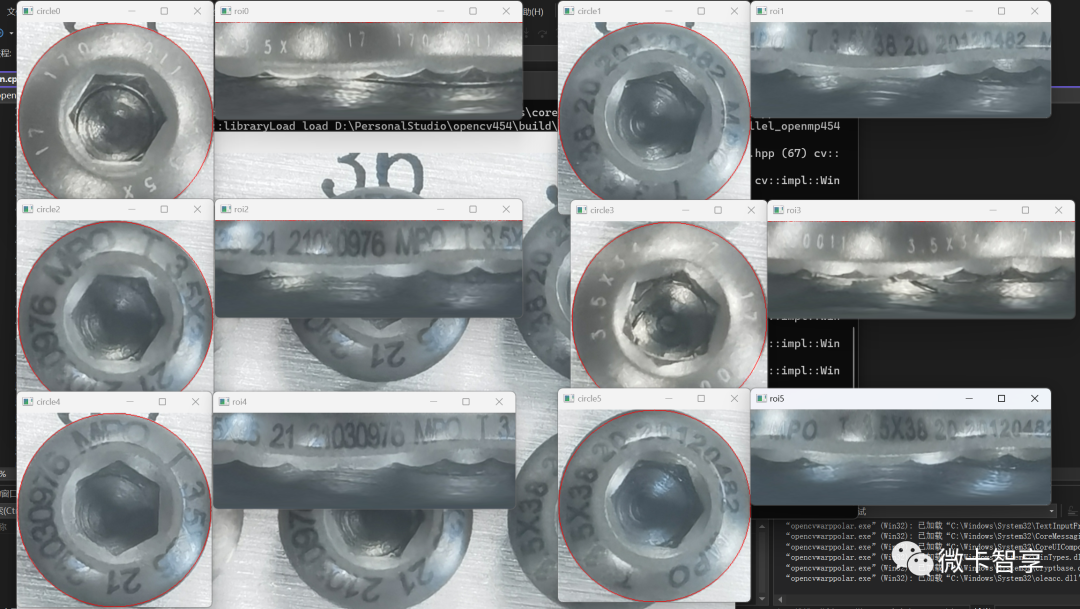 查找出骨钉后用极坐标变换生成的图像
查找出骨钉后用极坐标变换生成的图像
图像本来就是手机拍的,反光也比较厉害,所以本篇主要就是介绍极坐标变换,最后的OCR识别就不在这个范围内了。
极坐标变换函数
void cv::warpPolar(InputArray src, —原图像,单通道灰度图和三通道彩色图都可OutputArray dst, —输出图像,与原图像具有相同的数据类型和通道数Size dsize, —目标图像大小,如图不填这个值或dsize两个值中的某个值Point2f center, —极坐标变换时原点坐标double maxRadius, —极坐标系的极半径最大值int flags ) —插值方法与极坐标映射方法标志。方法之间通过“+”或者“|”号进行连接重点说明:
dsize:目标图像大小,Size(0,0)主要就是填写里面的width和height
-
当width和height两个值均<=0(默认),则目标图像将具有(几乎)相同的源边界圆面积
-
当width>0并且height <= 0,目标图像区域将与边界圆区域按比例缩放
-
当width和height都 > 0, 目标图像将具有给定的大小,因此边界圆的面积将缩放为dsize
flags:插值方法与极坐标映射方法标志
插值方法:图像缩放之后,肯定像素要进行重新计算的,就靠这个参数来指定重新计算像素的方式,一般分为:
-
INTER_NEAREST - 最邻近插值
-
INTER_LINEAR - 双线性插值,如果最后一个参数你不指定,默认使用这种方法
-
INTER_AREA -区域插值
-
INTER_CUBIC - 4x4像素邻域内的双立方插值
-
INTER_LANCZOS4 - 8x8像素邻域内的Lanczos插值
这个我们一般都默认为INTER_LINEAR - 双线性插值即可。
极坐标映射方法里面就三个,主要是极坐标变换、半对数极坐标变换和逆变换。
-
WARP_POLAR_LINEAR - 极坐标变换
-
WARP_POLAR_LOG - 半对数极坐标变换
-
WARP_INVERSE_MAP - 逆变换
核心来说其实就是两个极坐标变换和半对数极坐标变换,它们两个都是由圆变换为矩形,而逆变换就是针对两种变换由矩形再转为圆。逆变换在原来的flags后面用“+”连接即可。
warpPolar的起始位置和图像旋转角度
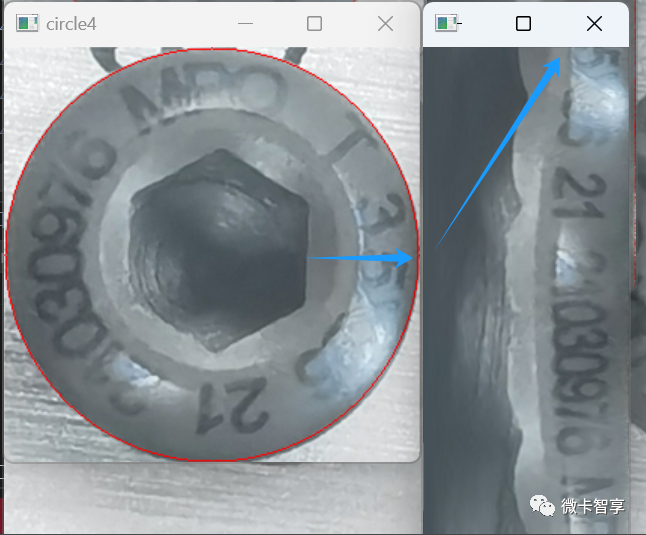
极坐标变换的起始位置默认就是3点钟的方向,上图中用蓝色箭头指的就是开始的位置,从3点钟方向顺时针来进行变换。
生成的矩形默认是向下垂直排列的,按我们自己的习惯肯定还需要将图像进行旋转,所以转换完后需要用rotate做一个图像的旋转。
代码如下:
//极坐标变换
//参数 flags=INTER_LINEAR 双线性插值
Mat warpPolarMat(Mat src, int flags = INTER_LINEAR + WARP_POLAR_LINEAR) {// 圆心坐标Point2f center = Point2f(src.cols / 2, src.rows / 2);// 圆的半径double maxRadius = min(center.y, center.x) - 1;// 圆的周长int circumference = maxRadius * 2 * 3.14;//输出图像Mat dst;// 极坐标变换, Size()表示OpenCV根据输入自行决定输出图像尺寸warpPolar(src, dst, Size(0, 0), center, maxRadius, flags);// 改变结果方向rotate(dst, dst, ROTATE_90_COUNTERCLOCKWISE);return dst;
}
实现思路及完整代码
| # | 实现步骤 |
|---|---|
| 1 | 图像简单处理(灰度图、中值滤波) |
| 2 | 霍夫圆检测获取到图像中的骨钉 |
| 3 | 将获取到的圆每个分别截取出来进行极坐标变换显示出来 |
完整代码
#include <iostream>
#include <opencv2/opencv.hpp>using namespace std;
using namespace cv;//显示窗口设置
//参数 img 显示的图像源,
// winname 显示的窗口名称,
// pointx 显示的坐标x
// pointy 显示的坐标y
void setshowwindow(Mat img, string winname, int pointx, int pointy)
{//设置显示窗口namedWindow(winname, WindowFlags::WINDOW_NORMAL);//设置图像显示大小resizeWindow(winname, img.size());//设置图像显示位置moveWindow(winname, pointx, pointy);
}//极坐标变换
//参数 flags=INTER_LINEAR 双线性插值
Mat warpPolarMat(Mat src, int flags = INTER_LINEAR + WARP_POLAR_LINEAR) {// 圆心坐标Point2f center = Point2f(src.cols / 2, src.rows / 2);// 圆的半径double maxRadius = min(center.y, center.x) - 1;// 圆的周长int circumference = maxRadius * 2 * 3.14;//输出图像Mat dst;// 极坐标变换, Size()表示OpenCV根据输入自行决定输出图像尺寸warpPolar(src, dst, Size(0, 0), center, maxRadius, flags);// 改变结果方向rotate(dst, dst, ROTATE_90_COUNTERCLOCKWISE);return dst;
}int main(int argc, char** argv) {//测试图片文件 string testfile = "E:/DCIM/imagetest/06.png";//读取图片Mat src = imread(testfile);//修改图片大小setshowwindow(src, "src", 50, 200);imshow("src", src);//灰度图Mat gray;cvtColor(src, gray, COLOR_BGR2GRAY);//中值滤波medianBlur(gray, gray, 9);//霍夫圆检测vector<Vec3f> circles;HoughCircles(gray, circles, HOUGH_GRADIENT, 1, 50, 100, 100);//绘制检测到的圆型for (size_t i = 0; i < circles.size(); ++i) {Vec3f item = circles[i];//绘制检测到的圆circle(src, Point(item[0], item[1]), item[2], Scalar(0, 0, 255));//根据圆点和半径生成矩形Rect rect = Rect(Point(item[0] - item[2], item[1] - item[2]), Point(item[0] + item[2], item[1] + item[2]));//截图到当前圆的图像Mat rectsrc = src(rect);//极坐标变换Mat rectdst, showmat;rectdst = warpPolarMat(rectsrc);//设置当前圆显示位置String title = "circle" + to_string(i);String title2 = "roi" + to_string(i);if ((i % 2) == 0) {setshowwindow(rectsrc, title, 50, rectsrc.rows * (i / 2) + 2);setshowwindow(rectdst, title2, 50 + rectsrc.cols + 2, rectsrc.rows * (i / 2) + 2);}else {setshowwindow(rectsrc, title, (rectsrc.rows + rectdst.rows) * 2 , rectsrc.rows * (i / 2) + (i % 2) + 2);setshowwindow(rectdst, title2, (rectsrc.rows + rectdst.rows) *2 + rectsrc.rows , rectsrc.rows * (i / 2) + (i % 2) + 2);}imshow(title, rectsrc);imshow(title2, rectdst);}waitKey();return 0;
}完

往期精彩回顾
Android Aidl跨进程通讯(四)--接口回调,服务端向客户端发送数据
Android Aidl跨进程通讯(三)--进阶使用

Android Aidl跨进程通讯(二)--异常捕获处理
相关文章:
OpenCV极坐标变换函数warpPolar的使用
学更好的别人, 做更好的自己。 ——《微卡智享》 本文长度为1702字,预计阅读4分钟 前言 前阵子在做方案时,得了几张骨钉的图片,骨科耗材批号效期管理一直是比较麻烦的,贴RFID标签成本太高,所以一般考虑还是…...
类与接口常见面试题
抽象类和接口的对比 抽象类是用来捕捉子类的通用特性的。接口是抽象方法的集合。 从设计层面来说,抽象类是对类的抽象,是一种模板设计,接口是行为的抽象,是一种行为的规范。 相同点 接口和抽象类都不能实例化都位于继承的顶端…...
Windows mysql5.7 执行查询/开启/测试binlog---简易记录
前言:基于虚拟机mysql版本为5.7,增量备份测试那就要用到binlog… 简述:二进制日志(binnary log)以事件形式记录了对MySQL数据库执行更改的所有操作。 binlog是记录所有数据库表结构变更(例如CREATE、ALTER…...

文档安全加固:零容忍盗窃,如何有效预防重要信息外泄
文档安全保护不仅需要从源头着手,杜绝文档在使用和传播过程中产生的泄密风险,同时还需要对文档内容本身进行有效的保护。为了防范通过拷贝、截屏、拍照等手段盗窃重要文档内容信息的风险,迅软DSE加密软件提供了文档加密保护功能,能…...

前端如何设置模板参数
1.背景: 最近接到一个需求,在一个类似chatGpt的聊天工具中,要在对话框中设置模板,后端提供了很多模板参数,然后要求将后端返回的特殊字符转成按钮,编辑完成后在相应的位置拼接成字符串。 2.效果:…...

06 使用v-model实现双向数据绑定
概述 Vue achieves two-way data binding by creating a dedicated directive that watches a data property within your Vue component. The v-model directive triggers data updates when the target data property is modified on the UI. Vue 通过创建一个专用指令来观…...
【C++11特性篇】C++11中新增的initializer_list——初始化的小利器(2)
前言 大家好吖,欢迎来到 YY 滴C11系列 ,热烈欢迎! 本章主要内容面向接触过C的老铁 主要内容含: 欢迎订阅 YY滴C专栏!更多干货持续更新!以下是传送门! 目录 一.探究std::initializer_list是什么…...
计算机网络传输层(期末、考研)
计算机网络总复习链接🔗 目录 传输层的功能端口UDP协议UDP数据报UDP的首部格式UDP校验 TCP协议(必考)TCP报文段TCP连接的建立TCP连接的释放TCP的可靠传输TCP的流量控制零窗口探测报文段 TCP的拥塞控制慢开始和拥塞控制快重传和快恢复 TCP和U…...
【STM32入门】4.1中断基本知识
1.中断概览 在开展红外传感器遮挡计次的实验之前,有必要系统性的了解“中断”的基本知识. 中断是指:在主程序运行过程中,出现了特定的中断触发条件(中断源),使得CPU暂停当前正在运行的程序,转…...
HCIA-H12-811题目解析(3)
1、【单选题】 以下关于路由器的描述,说法错误的是? 2、【单选题】某网络工程师在输入命令行时提示如下信息:Error:Unrecognized command foun at position.对于该提示信息说法正确的是? 3、【单选题】如下图所示的网络…...

【异步绘制】UIView刷新原理 与 异步绘制
快捷目录 壹、 iOS界面刷新机制贰、浅谈UIView的刷新与绘制概述一.UIView 与 CALayer1. UIView 与 CALayer的关系2. CALayer的一些常用属性contents属性contentGravity属性contentsScale属性maskToBounds属性contentsRect属性 二.View的布局与显示1.图像显示原理2.布局layoutSu…...

[ERROR] ocp-server-ce-py_script_start_check-4.2.1 RuntimeError: ‘tenant_name‘
Oceanbase 安装成功后关闭OCP,在重新启动时报错 使用OBD 启动OCP报如下错误 [adminobd ~]$ obd cluster start ocp Get local repositories ok Search plugins ok Open ssh connection ok Load cluster param plugin ok Check before start ocp-server x [ERROR] …...
模拟实验中经常遇到的问题和常用技巧
简介 最近在进行新文章的数值模拟阶段。上一次已经跟读者们分享了模拟实验的大致流程,见:数值模拟流程记录和分享 。 本文是在前提下,汇总了小编在模拟实验中经常遇到的问题和常用技巧。 文章目录 简介1. 隐藏输出结果自动创建文件夹保存多…...
 ——模版语法1)
微信小程序(二) ——模版语法1
文章目录 wxml模板语法拼接字符数据绑定 wxml模板语法 拼接字符 <image src"{{test1src}}" mode""/>数据绑定 在data中定义数据,吧数据定义到data对象中在wxml中使用数据不论是绑定内容还是属性都是用 {{}} 语法 动态绑定内容 *声明…...
牛客小白月赛83 解题报告
题目链接: https://ac.nowcoder.com/acm/contest/72041#question A题 解题思路 签到 代码 #include <bits/stdc.h> using namespace std;int main() {int a, b, c, d, e;cin >> a >> b >> c >> d >> e;int A, B, C, D…...

蓝桥杯专题-真题版含答案-【三角螺旋阵】【干支记年法】【异或加密法】【金字塔】
Unity3D特效百例案例项目实战源码Android-Unity实战问题汇总游戏脚本-辅助自动化Android控件全解手册再战Android系列Scratch编程案例软考全系列Unity3D学习专栏蓝桥系列ChatGPT和AIGC 👉关于作者 专注于Android/Unity和各种游戏开发技巧,以及各种资源分…...
)
鸿蒙篇——初次使用鸿蒙原生编译器DevEcoStudio创建一个鸿蒙原生应用遇到的坑--汇总(持续更新)
前言:欢迎各位鸿蒙初学者、开发者来本帖交流讨论,包含各位遇到的问题、鸿蒙的bug、解决方法等等,我会收集有效的内容更新到本文章中。 背景:2023年12月13日,使用DevEcoStudio 4.0.0.600版本,项目的compileS…...

细胞培养之一二三:哺乳动物细胞培养污染问题和解决方案
一、哺乳动物细胞污染是什么[1]? 污染通常是指在细胞培养基中存在不需要的微生物、不需要的哺乳动物细胞和各种生化或化学物质,从而影响所需哺乳动物细胞的生理和生长。由于微生物在包括人体特定部位在内的环境中无处不在,而且它们的繁殖速度…...

《Linux C编程实战》笔记:文件属性操作函数
获取文件属性 stat函数 在shell下直接使用ls就可以获得文件属性,但是在程序里应该怎么获得呢? #include<sys/types.h> #include <sys/stat.h> #include <unistd.h> int stat(const char *file_name,struct stat *buf); int fstat(i…...

linux中的网络知识
网络 认识基本网络网络划分计算机网络分为LAN、MAN、WAN公网ip和私网ip 传输介质单位换算客户端和服务端 OSI模型osi七层模型TCP/IP:传输控制协议簇HTTP协议简介UDP协议介绍物理地址:mac地址,全球唯一,mac由6段16进制数组成,每段有…...

接入taotoken服务后stm32设备端api调用量的可视化分析
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 接入taotoken服务后stm32设备端api调用量的可视化分析 1. 背景与需求 在嵌入式AI应用开发中,将大模型能力集成到STM32…...

多物流机器人任务调度与路径规划【附程序】
✨ 长期致力于物流机器人、任务调度、路径规划、沙猫群算法研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)栅格-拓扑双层地图建模与任务分配…...
)
PyTorch/TensorFlow深度学习环境搭建:在Windows10上一步到位搞定CUDA和cuDNN(避坑合集)
PyTorch/TensorFlow深度学习环境搭建:在Windows10上一步到位搞定CUDA和cuDNN(避坑合集) 刚入坑深度学习的开发者,最头疼的莫过于环境配置。明明按照教程一步步安装了PyTorch或TensorFlow,却在代码运行时看到CUDA不可用…...

工作10年才明白,这些被忽略的编程基础,才是升职加薪的关键
文章目录前言一、代码规范:不是“处女座洁癖”,是AI时代的“保命符”二、函数式编程:你以为“写SpringBoot用不上”,其实AI Agent全靠它三、命令行与系统模块:别让“IDE一键运行”,毁了你的生产效率四、经典…...

arp-scan:穿透防火墙的局域网设备发现利器,为什么它比传统扫描工具更有效?
arp-scan:穿透防火墙的局域网设备发现利器,为什么它比传统扫描工具更有效? 【免费下载链接】arp-scan The ARP Scanner 项目地址: https://gitcode.com/gh_mirrors/ar/arp-scan 在复杂的网络环境中,快速准确地发现局域网内…...

从无人机悬停到电机调速:深入浅出聊聊‘稳定裕度’到底在保证什么?
从无人机悬停到电机调速:稳定裕度如何守护工程系统的安全边界 当无人机在强风中突然失控摇摆,或是工业机械臂在高速运动时出现震颤,这些现象背后往往隐藏着一个关键控制参数——稳定裕度。对于工程师而言,它不仅是教科书上的数学概…...

使用taotoken cli工具一键配置ubuntu开发环境中的多工具密钥
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 使用taotoken cli工具一键配置ubuntu开发环境中的多工具密钥 在开发环境中接入多个大模型工具时,手动配置每个工具的AP…...

3个核心功能解密:PT-Plugin-Plus如何实现PT站点种子下载效率提升
3个核心功能解密:PT-Plugin-Plus如何实现PT站点种子下载效率提升 【免费下载链接】PT-Plugin-Plus PT 助手 Plus,为 Microsoft Edge、Google Chrome、Firefox 浏览器插件(Web Extensions),主要用于辅助下载 PT 站的种子…...
)
蓝桥杯嵌入式备赛:手把手教你用STM32G4的ADC读取光敏电阻(国信长天扩展板)
蓝桥杯嵌入式竞赛实战:STM32G4光敏电阻精准采集与优化策略 在蓝桥杯嵌入式竞赛中,环境光检测是高频考点之一。国信长天扩展板上的光敏电阻模块看似简单,但要在竞赛中稳定发挥,需要深入理解硬件电路设计原理、掌握ADC采集的优化技巧…...

DownKyi终极指南:简单快速获取B站8K超高清视频的完整解决方案
DownKyi终极指南:简单快速获取B站8K超高清视频的完整解决方案 【免费下载链接】downkyi 哔哩下载姬downkyi,哔哩哔哩网站视频下载工具,支持批量下载,支持8K、HDR、杜比视界,提供工具箱(音视频提取、去水印等…...