python图像二值化处理
目录
1、双峰法
2、P参数法
3、迭代法
4、OTSU法
图像的二值化处理是将图像上的像素点的灰度值设置为0或255,也就是将整个图像呈现出明显的只有黑和白的视觉效果。二值化是图像分割的一种最简单的方法,可以把灰度图像转换成二值图像。具体实现是将大于某个临界灰度值的像素灰度设为灰度极大值,把小于这个值的像素灰度设为灰度极小值,从而实现二值化。
根据阈值选取的不同,二值化的算法分为固定阈值和自适应阈值。常见的二值化方法有双峰法、P参数法、迭代法和OTSU法等。其中,双峰法是通过寻找直方图上的两个最高峰,将阈值选取在两个峰之间的最低处;P参数法是根据图像的直方图分布情况,动态地确定一个阈值;迭代法是通过多次迭代计算,逐渐逼近最佳的阈值;OTSU法则是通过最大化类间方差来确定最佳阈值。
1、双峰法
双峰法是一种简单的二值化处理方法,其基本思想是找到图像直方图中的两个最大值,并将阈值设定在这两个峰值之间的最低处。这种方法适用于背景和前景差异较大的图像。

import cv2
import numpy as np
def find_peaks(hist):# 找到直方图中的峰值peaks = []for i in range(1, len(hist) - 1):if hist[i] > hist[i - 1] and hist[i] > hist[i + 1]:peaks.append(i)# 返回前两个峰值(如果存在)if len(peaks) >= 2:return peaks[0], peaks[1]else:return None, None
# 读取图像并转换为灰度图像
image = cv2.imread(r'1.jpg', cv2.IMREAD_GRAYSCALE)
# 计算图像的直方图
hist, bins = np.histogram(image.ravel(), 256, [0, 256])
# 找到直方图中的两个峰值
peak1, peak2 = find_peaks(hist)
# 计算阈值,取两个峰值的平均值作为阈值
threshold = int((peak1 + peak2) / 2)
# 对图像进行二值化处理
binary_image = cv2.threshold(image, threshold, 255, cv2.THRESH_BINARY)[1]
# 显示二值化后的图像
cv2.imshow('Binary Image', binary_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
2、P参数法
P参数法是一种图像二值化处理方法,用于将灰度图像转换为二值图像。它基于图像的局部信息进行操作,具体步骤如下:
-
选择一个合适的阈值T(0 ≤ T ≤ 255)作为全局阈值。
-
对于图像中的每个像素点,计算其周围邻域内像素的均值和标准差。如果该像素的灰度值大于等于均值加上参数P乘以标准差,则将其设置为白色(255),否则设置为黑色(0)。
import cv2
import numpy as np
def p_thresholding(image, P):# 将图片转换为灰度图像gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 获取图像大小height, width = gray_image.shape
# 初始化输出二值图像binary_image = np.zeros((height, width), np.uint8)
for i in range(height):for j in range(width):# 计算像素的周围邻域内像素的均值和标准差neighborhood_mean = np.mean(gray_image[max(0, i-1):min(height, i+2), max(0, j-1):min(width, j+2)])neighborhood_std = np.std(gray_image[max(0, i-1):min(height, i+2), max(0, j-1):min(width, j+2)])
# 根据P参数法判断像素的二值化结果if gray_image[i, j] >= neighborhood_mean + P * neighborhood_std:binary_image[i, j] = 255else:binary_image[i, j] = 0
return binary_image
# 读取图像
image = cv2.imread(r'q.jpg')
# 设置参数P的值
P = 0.2
# 调用P参数法二值化函数
binary_image = p_thresholding(image, P)
# 显示原始图像和二值图像
cv2.imshow('Original Image', image)
cv2.imshow('Binary Image', binary_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
3、迭代法
基本原理很简单:
(1)选择灰度图的平均值作为初始阈值T0 ;
(2)计算小于等于T0的平均值T1, 和大于T0的平均值T2;
(3)新的阈值为T = (T1 + T2)/ 2;
(4)比较T和T0,若相等,则返回T,即为迭代阈值; 否则 T0 = T,重复(1)-(3)
import cv2
def iterative_thresholding(image, threshold=127):# 初始化二值化结果binary_image = image.copy()
# 迭代更新阈值prev_threshold = 0while threshold != prev_threshold:prev_threshold = threshold
# 计算两个区域的平均灰度值region1_mean = image[image <= threshold].mean()region2_mean = image[image > threshold].mean()
# 更新阈值threshold = (region1_mean + region2_mean) // 2
# 根据新的阈值进行二值化binary_image[image <= threshold] = 0binary_image[image > threshold] = 255
return binary_image
# 读取图像
image = cv2.imread(r'C:\Users\Downloads\q.jpg')
# 调用迭代法二值化函数
binary_image = iterative_thresholding(image)
# 显示结果
cv2.imshow('Binary Image', binary_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
4、OTSU法
最大类间方差是由日本学者大津(Nobuyuki Otsu)于1979年提出,是一种确定图像二值化分割阈值的算法。算法假设图像像素能够根据全局阈值,被分成背景[background]和目标[objects]两部分。然后,计算该最佳阈值来区分这两类像素,使得两类像素区分度最大。
从大津法的原理上来讲,该方法又称作最大类间方差法,因为按照大津法求得的阈值进行图像二值化分割后,前景与背景图像的类间方差最大。它被认为是图像分割中阈值选取的最佳算法,计算简单,不受图像亮度和对比度的影响,因此在数字图像处理上得到了广泛的应用。因方差是灰度分布均匀性的一种度量,背景和前景之间的类间方差越大,说明构成图像的两部分的差别越大,当部分前景错分为背景或部分背景错分为前景都会导致两部分差别变小。因此,使类间方差最大的分割意味着错分概率最小。
import cv2
# 读取图像并转换为灰度图像
image = cv2.imread(r'q.jpg', cv2.IMREAD_GRAYSCALE)
# 使用OTSU法计算最佳阈值
ret, binary_image = cv2.threshold(image, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)
# 显示二值化后的图像
cv2.imshow('Binary Image', binary_image)
cv2.waitKey(0)
cv2.destroyAllWindows()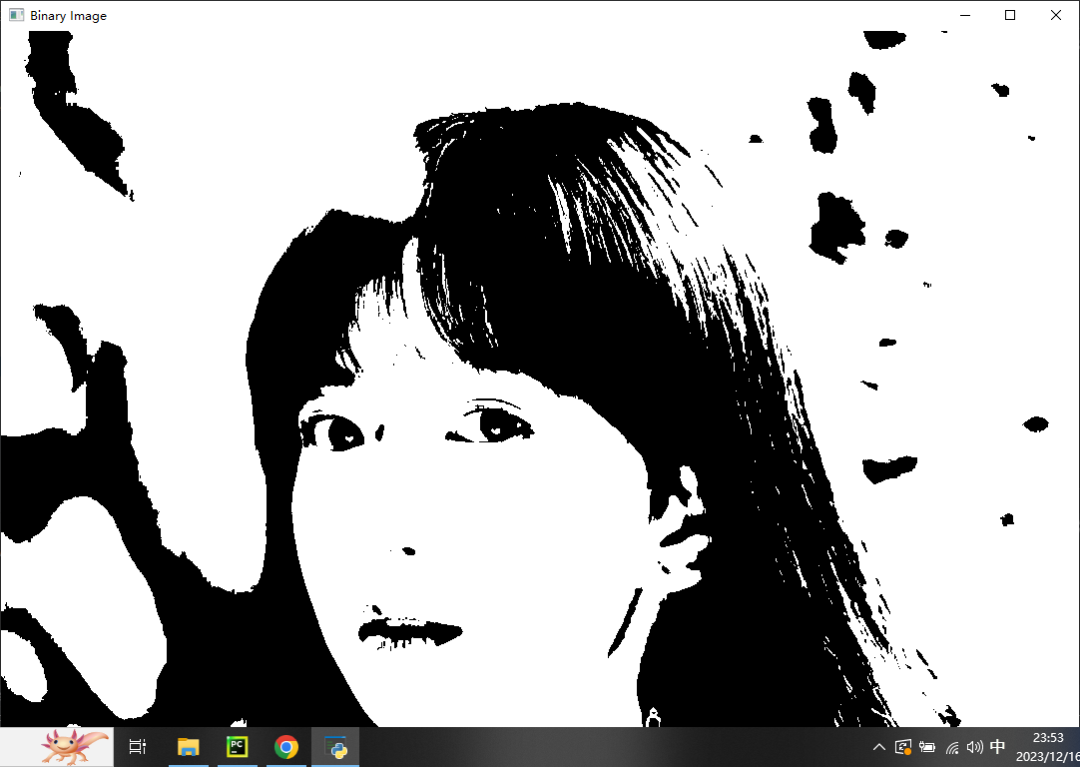
相关文章:
python图像二值化处理
目录 1、双峰法 2、P参数法 3、迭代法 4、OTSU法 图像的二值化处理是将图像上的像素点的灰度值设置为0或255,也就是将整个图像呈现出明显的只有黑和白的视觉效果。二值化是图像分割的一种最简单的方法,可以把灰度图像转换成二值图像。具体实现是将大…...

4.配置系统时钟思路及方法
前言: 比起之前用过的三星的猎户座4412芯片,STM32F4的系统时钟可以说是小巫见大巫,首先我们需要清晰时钟产生的原理:几乎大多数的芯片都是由晶振产生一个比较低频的频率,然后通过若干个PLL得到单片机能承受的频率&…...

使用openMVS库,在VS2022中启用c++17标准编译仍然报错
使用openMVS库,在VS2022中启用c17标准编译仍然报错 现象 项目中引用了某些开源库(例如openmvs2.1.0),编译时要求启用编译器对c17的支持。 没问题!大家都知道在下图所示的位置调整C语言标准: 但是&#…...
uniGUI之上传文件UniFileUploadButton
TUniFileUploadButton主要属性: Filter: 文件类型过滤,有图片image/* audio/* video/*三种过滤 MaxAllowedSize: 设置文件最大上传尺寸; Message:标题以及消息文本,可翻译成中文 TUniFileUploadButton控件 支持多…...

福德植保无人机工厂:创新科技与绿色农业的完美结合
亲爱的读者们,欢迎来到福德植保无人机工厂的世界。这里,科技与农业的完美结合为我们描绘出一幅未来农业的新篇章。福德植保无人机工厂作为行业的领军者,以其领先的无人机技术,创新的理念,为我们展示了一种全新的农业服…...

JsRpc技术服务搭建,最简单的JSRPC,Flask+undetected-chromedriver
只需10来行代码快速实现JSRpc,最简单的JSRPC 使用Flask和undetected-chromedriver快速实现JsRpc 推荐Python版本3.7.x及以上,需要pip安装 pip install Flask pip install undetected-chromedriver __author__ jiuLiang __email__ "jiuliangef…...

<优化接口设计的思路>:接口安全
前言 一、接口安全的方式 1. 身份认证,鉴别客户端 2. 请求过程鉴权,防止请求被篡改 3. 访问控制,即控制客户端对API的访问权限 前言 某家电商平台上,用户可以通过客户端发起购物请求,并对所选商品进行下…...
Gitee基础知识
目录 1-gitee 1.1gitee介绍 1.2git与gitee的关系 1.3在国内为什么选择Gitee 2-注册与创建远程仓库 2.1注册 2.2创建远程仓库 2.3配置ssh公钥 2.3.1公钥的生成方法: 2.3.2 在gitee中配置公钥 2.3.4验证公钥 3-添加与推送远程仓库master 3.1基本命令…...

网络空间搜索引擎- FOFA的使用技巧总结
简介 FOFA是一款网络空间测绘的搜索引擎,旨在帮助用户以搜索的方式查找公网上的互联网资产。 FOFA的查询方式类似于谷歌或百度,用户可以输入关键词来匹配包含该关键词的数据。不同的是,这些数据不仅包括像谷歌或百度一样的网页,还…...
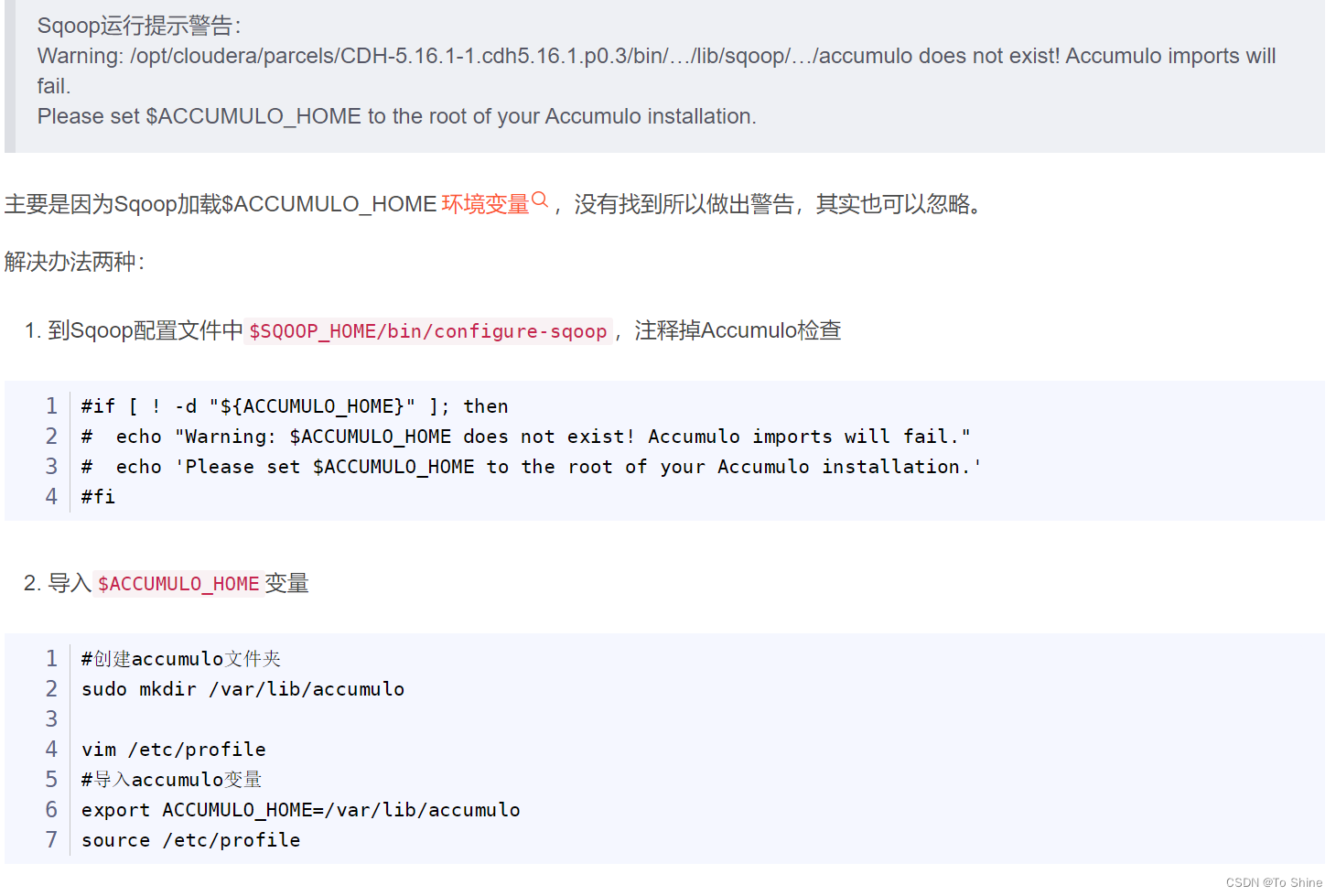
用户行为分析遇到的问题-ubantu16,hadoop3.1.3
用户行为分析传送门 我的版本 ubantu16 hadoop 3.1.3 habse 2.2.2 hive3.1.3 zookeeper3.8.3 sqoop 1.46/1.47 我sqoop把MySQL数据往hbase导数据时候有问题 重磅:大数据课程实验案例:网站用户行为分析(免费共享) 用户行为分析-小…...
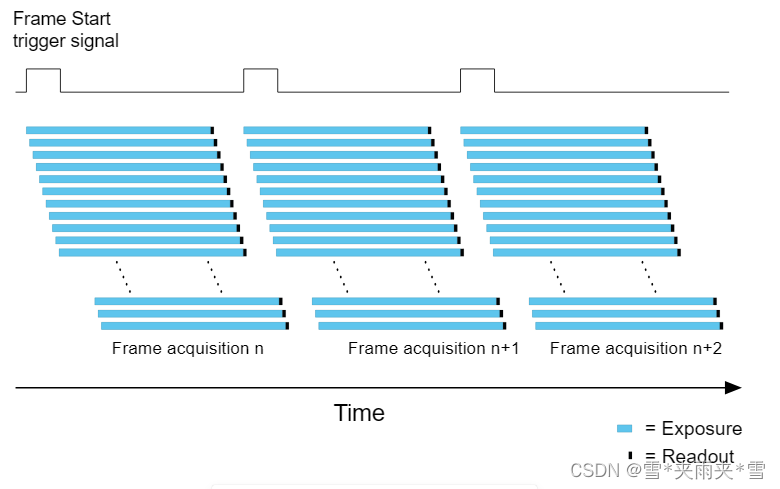
camera曝光时间
曝光和传感器读数 相机上的图像采集过程由两个不同的部分组成。第一部分是曝光。曝光完成后,第二步就是从传感器的寄存器中读取数据并传输(readout)。 曝光:曝光是图像传感器进行感光的一个过程,相机曝光时间…...

Vue 项目中使用 debugger 在 chrome 谷歌浏览器中失效以及 console.log 指向去了 vue.js 代码
问题 今天在代码里面输出 console.log 信息直接指向了 vue.js,并且代码里面写了 debgger 也不生效 解决 f12 找到浏览器的这个设置图标 找到这个 ignore list 的 custom exclusion rules 取消掉 /node_modules/|/bower_components/ 这样就正常了...
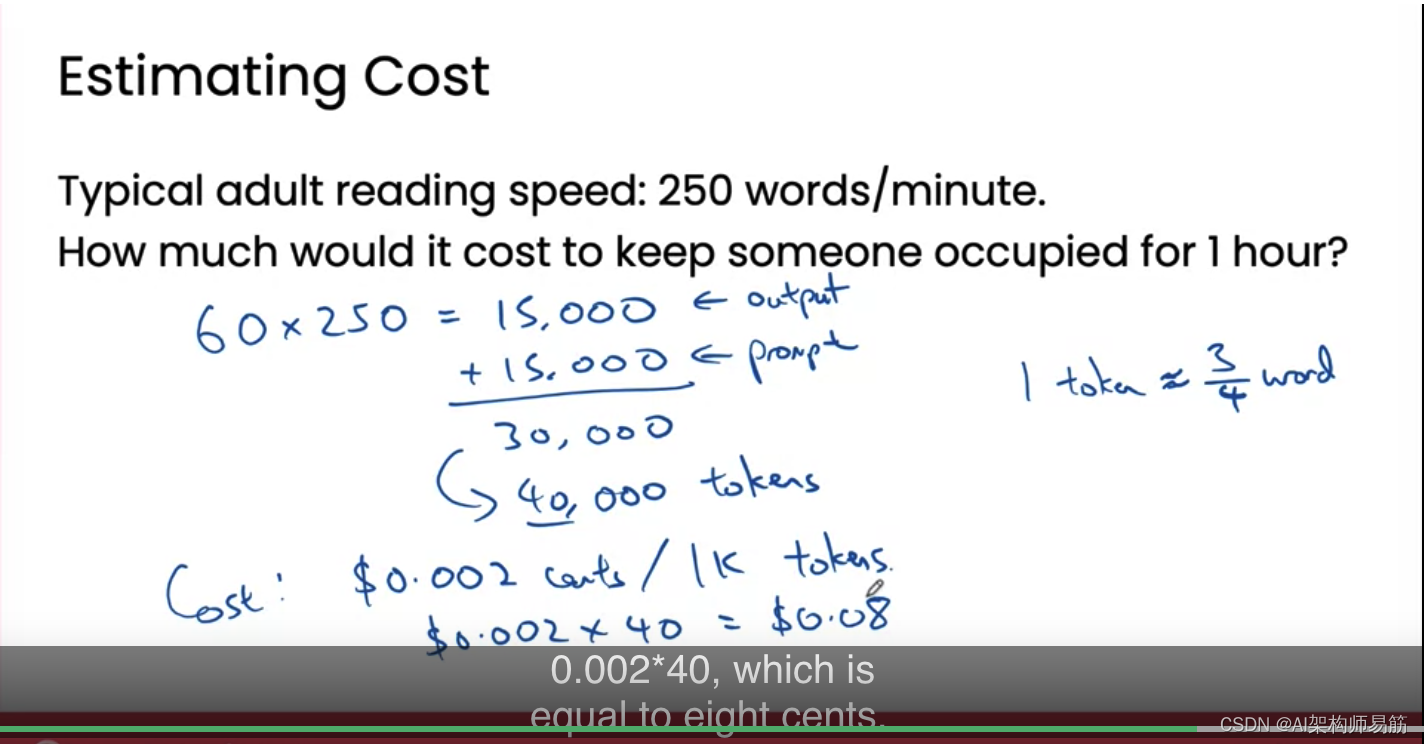
翻译: ChatGPT Token消耗粗略计算英文就是除以四分之三
在这个视频中,我想带你快速浏览一些例子,以建立对在软件应用中使用大型语言模型的实际成本的直观感受。让我们来看看。这是一些示例价格,用于从不同的大型语言模型获取提示和回应,这些模型对开发者可用。即,如果你在你…...

【线性代数】期末速通!
1. 行列式的性质 1.1 求一个行列式的值 特殊地,对角线左下全为0,结果为对角线乘积。行 r 列 c 1.2 性质 某行(列)加上或减去另一行(列)的几倍,行列式不变某行(列)乘 …...

速盾网络:业务卓越,数字安全的领先者
在数字时代的浪潮中,业务成功需要强大的数字基石。速盾网络以其出色的CDN加速、高防IP、SDK游戏盾和抗DDoS攻击等业务,成为业界领先的数字安全保障者,为您的业务提供全方位的支持与保护。 CDN加速:业务飞跃的翅膀 速盾网络以全球…...
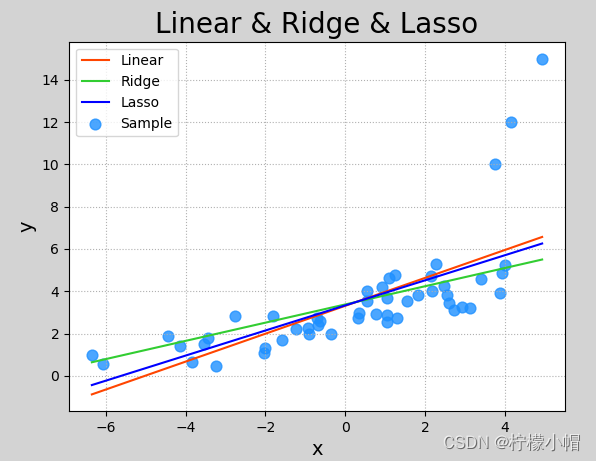
Python 全栈体系【四阶】(七)
第四章 机器学习 六、多项式回归 1. 什么是多项式回归 线性回归适用于数据呈线性分布的回归问题。如果数据样本呈明显非线性分布,线性回归模型就不再适用(下图左),而采用多项式回归可能更好(下图右)。例…...

智能优化算法应用:基于蛾群算法3D无线传感器网络(WSN)覆盖优化 - 附代码
智能优化算法应用:基于蛾群算法3D无线传感器网络(WSN)覆盖优化 - 附代码 文章目录 智能优化算法应用:基于蛾群算法3D无线传感器网络(WSN)覆盖优化 - 附代码1.无线传感网络节点模型2.覆盖数学模型及分析3.蛾群算法4.实验参数设定5.算法结果6.参考文献7.MA…...

Tekton 克隆 git 仓库
Tekton 克隆 git仓库 介绍如何使用 Tektonhub 官方 git-clone task 克隆 github 上的源码到本地。 git-clone task yaml文件下载地址:https://hub.tekton.dev/tekton/task/git-clone 查看git-clone task yaml内容: 点击Install,选择一种…...

高通平台开发系列讲解(AI篇)SNPE工作流程介绍
文章目录 一、转换网络模型二、量化2.1、选择量化或非量化模型2.2、使用离线TensorFlow或Caffe模型2.3、使用非量化DLC初始化SNPE2.4、使用量化DLC初始化SNPE三、准备输入数据四、运行加载网络沉淀、分享、成长,让自己和他人都能有所收获!😄 📢本篇章主要介绍SNPE模型工作…...

YoloV8改进策略:ASF-YOLO,结合了空间和尺度特征在小目标和密集目标场景有效涨点
摘要 本文提出了一种新型的Attentional Scale Sequence Fusion based You Only Look Once (YOLO)框架(ASF-YOLO),该框架结合了空间和尺度特征,以实现准确且快速的细胞实例分割。该框架建立在YOLO分割框架之上,采用Scale Sequence Feature Fusion (SSFF)模块增强网络的多尺…...

codex出现Reconnecting和stream disconnected before completion:stream closed before response.complete解决方案
大家好,我是爱编程的喵喵。双985硕士毕业,现担任全栈工程师一职,热衷于将数据思维应用到工作与生活中。从事机器学习以及相关的前后端开发工作。曾在阿里云、科大讯飞、CCF等比赛获得多次Top名次。现为CSDN博客专家、人工智能领域优质创作者。喜欢通过博客创作的方式对所学的…...

使用Nodejs和Taotoken快速构建一个支持多模型切换的聊天服务
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 使用Node.js和Taotoken快速构建一个支持多模型切换的聊天服务 基础教程类,面向全栈或后端开发者,教程将引导…...
)
Unity3D LineRenderer 从入门到精通:手把手教你绘制炫酷动态轨迹(附完整C#脚本)
Unity3D LineRenderer 动态轨迹绘制实战指南 在游戏开发中,动态轨迹效果是提升视觉体验的重要元素之一。无论是魔法技能的飞行路径、赛车游戏的轮胎痕迹,还是数据可视化中的动态连线,流畅且富有表现力的线条渲染都能显著增强场景的沉浸感。Un…...

工业多串口通信实战:基于EM9170的8串口方案设计与优化
1. 项目概述:为什么8串口在今天依然重要?在物联网、工业自动化、智能楼宇这些领域里摸爬滚打久了,你会发现一个有趣的现象:那些看似“古老”的通信接口,生命力往往比我们想象的要顽强得多。串口,或者说RS-2…...

弱引用TWeakObjectPtr原理
弱引用的原理:从通用思路到 UE TWeakObjectPtr 原理总结: !!#ff0000 UE 的 GC 体系有一张全局对象表 GUObjectArray,弱引用存了一个索引,以及这个物体创建时的序列号,简单来说是不是弱引用先拿着索引去序列号找一下&am…...

对比直接使用官方API体验Taotoken在用量透明上的优势
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 对比直接使用官方API体验Taotoken在用量透明上的优势 在集成大模型能力到实际项目时,开发者通常会面临一个共同的挑战&…...
仿真)
学Simulink——光伏储能系统双向DC-AC逆变器恒功率控制(PQ控制)仿真
目录 手把手教你学Simulink——光伏储能系统双向DC-AC逆变器恒功率控制(PQ控制)仿真 一、背景与挑战 1.1 为什么 PQ 控制?光伏与储能的“任务本质” 1.2 核心痛点与设计目标 二、系统架构与核心控制推导 2.1 整体架构:功率指令 → 电流跟踪 → 电网注入 2.2 核心数学…...

Defender Control:Windows Defender 终极控制指南 - 如何永久禁用Windows安全防护
Defender Control:Windows Defender 终极控制指南 - 如何永久禁用Windows安全防护 【免费下载链接】defender-control An open-source windows defender manager. Now you can disable windows defender permanently. 项目地址: https://gitcode.com/gh_mirrors/…...

低温预警!固化慢、易开裂……密封胶冬季施工手册
低温预警!固化慢、易开裂……密封胶冬季施工手册 硅酮耐候密封胶主要作用是保障幕墙的气密性、水密性。其出现问题,可能会导致耐候密封失效,从而造成幕墙漏水漏气,影响幕墙的正常使用。耐候密封胶由于考虑到现场施工,几乎都是单组分硅酮密封胶产品。进入冬季,气候变化明…...

5分钟快速上手:使用res-downloader实现视频号批量下载的终极指南
5分钟快速上手:使用res-downloader实现视频号批量下载的终极指南 【免费下载链接】res-downloader 视频号、小程序、抖音、快手、小红书、直播流、m3u8、酷狗、QQ音乐等常见网络资源下载! 项目地址: https://gitcode.com/GitHub_Trending/re/res-downloader …...