C++ boost planner_cond_.wait(lock) 报错1225
1.如下程序段 boost unique_lock doesn’t own the mutex: Operation not permitted
问题:
其中makePlan是一个线程。这里的unlock导致错误这个报错 boost unique_lock doesn’t own the mutex: Operation not permitted
bool navigation::makePlan(){ //cv::namedWindow("Dynamic Image", cv::WINDOW_AUTOSIZE); // 创建一个窗口global_cost_map_ = planner_costmap_ros_->getCostmap();costs_ = global_cost_map_->getCharMap(); unsigned int cx = global_cost_map_->getSizeInCellsX(), cy = global_cost_map_->getSizeInCellsY();//xwidth y height//int x[9] = {748,1332,713,539,535,1424,1577,712,1007}; // x width cx//int y[9] = {cy-343,cy-312,cy-333,cy - 288,cy - 287,cy - 61,cy - 282,cy - 266,cy - 771};//y height cyint x[2] = {363,424};int y[2] = {cy - 694,cy - 1061};//int k =8;// 6;int k = 0;boost::unique_lock<boost::recursive_mutex> lock(planner_mutex_);while(1){ // while(!runner_){//std::cout << "plan thread enter waiting status!" << std::endl;planner_cond_.wait(lock);lock.unlock();// runner_ = true; // }//std::cout << "starting planning..." << std::endl;if(state_ == PLANNING) {global_cost_map_ = planner_costmap_ros_->getCostmap();costs_ = global_cost_map_->getCharMap(); unsigned int cx = global_cost_map_->getSizeInCellsX(), cy = global_cost_map_->getSizeInCellsY();convert_offset_ = 0.5;//lock.unlock();bool gotPlan = false;//navigation::makePlanner(start,goal,plan_result_cell_);//std::cout << "Planning Complete!" << std::endl;}}}
分析:
```cpp
boost::unique_lock<boost::recursive_mutex> lock(planner_mutex_);while (1) {planner_cond_.wait(lock); // 等待条件变量的通知并解锁互斥量// 在条件变量的通知下被唤醒后,获取到互斥量的所有权bool gotPlan = false;// 执行计划的操作// ...// 设置gotPlan为true或false表示是否成功获得计划lock.unlock(); // 在计划完成后解锁互斥量lock.lock(); // 重新上锁互斥量
}
在这个例子中,在while循环开始之前,我们创建了一个boost::unique_lock对象并传入互斥量。然后,我们在循环体内调用planner_cond_.wait(lock)等待条件变量的通知,并在等待之前释放锁。当收到条件变量的通知时,unique_lock对象会自动重新获取互斥量的所有权,然后我们继续执行计划的操作。
在计划完成后,我们首先调用unlock()解锁互斥量,然后重新使用lock()重新上锁互斥量,以便在下一次循环开始时可以正确地等待新的条件变量通知。
通过这种方式,我们保证了唤醒的线程可以获得互斥量的所有权,并避免在没有所有权的情况下解锁互斥量导致的错误。
```cppbool navigation::makePlan(){ //cv::namedWindow("Dynamic Image", cv::WINDOW_AUTOSIZE); // 创建一个窗口global_cost_map_ = planner_costmap_ros_->getCostmap();costs_ = global_cost_map_->getCharMap(); unsigned int cx = global_cost_map_->getSizeInCellsX(), cy = global_cost_map_->getSizeInCellsY();//xwidth y height//int x[9] = {748,1332,713,539,535,1424,1577,712,1007}; // x width cx//int y[9] = {cy-343,cy-312,cy-333,cy - 288,cy - 287,cy - 61,cy - 282,cy - 266,cy - 771};//y height cyint x[2] = {363,424};int y[2] = {cy - 694,cy - 1061};//int k =8;// 6;int k = 0;boost::unique_lock<boost::recursive_mutex> lock(planner_mutex_);while(1){ // while(!runner_){//std::cout << "plan thread enter waiting status!" << std::endl;planner_cond_.wait(lock);lock.unlock();// runner_ = true; // }//std::cout << "starting planning..." << std::endl;if(state_ == PLANNING) {global_cost_map_ = planner_costmap_ros_->getCostmap();costs_ = global_cost_map_->getCharMap(); unsigned int cx = global_cost_map_->getSizeInCellsX(), cy = global_cost_map_->getSizeInCellsY();convert_offset_ = 0.5;//lock.unlock();bool gotPlan = false;//navigation::makePlanner(start,goal,plan_result_cell_);//std::cout << "Planning Complete!" << std::endl;}lock.lock();//循环结束要上锁}}
2. 上述线程占用CPU资源较大,如何处理?
可能是因为程序中的循环没有适当的等待时间,导致CPU不断地执行循环代码。为了降低CPU占用率,您可以在循环中添加适当的等待时间。
具体在循环添加如下等待时间:
std::this_thread::sleep_for(std::chrono::milliseconds(100));3. C++ 报错 coredown如何解决?Aborted (core dumped)首先设置“
ulimit -c unlimited //将coredown文件设置不限制存储空间
重新执行问题程序,camke 编译后在build文件下
发生core dump之后,使用gdb查看core文件的内容, 以定位文件中引发core dump的行,在在Linux下,查看core文件中的出错堆栈信息有二种方式,使用:gdb -c core.pid program_name或gdb [program_name] [core.pid]可以进入gdb模式:
在进入gdb后输入where并回车,就可以指出是在哪一行被Down掉,在哪个函数内,由谁调用等等。
在进入gdb后输入 bt,用bt命令查看backtrace以检查发生程序运行到哪里,来定位core dump的文件->行。
那我们的文件下运行
gdb -c core navigation
然后再输入
where
Reference
1. Linux遇到Aborted (core dumped)
相关文章:
C++ boost planner_cond_.wait(lock) 报错1225
1.如下程序段 boost unique_lock doesn’t own the mutex: Operation not permitted 问题: 其中makePlan是一个线程。这里的unlock导致错误这个报错 boost unique_lock doesn’t own the mutex: Operation not permitted bool navigation::makePlan(){ //cv::named…...
LeetCode刷题--- 字母大小写全排列
个人主页:元清加油_【C】,【C语言】,【数据结构与算法】-CSDN博客 个人专栏 力扣递归算法题 http://t.csdnimg.cn/yUl2I 【C】 http://t.csdnimg.cn/6AbpV 数据结构与算法 http://t.csdnimg.cn/hKh2l 前言:这个专栏主要讲述递归递归、搜索与回…...
)
165. 小猫爬山(DFS之剪枝与优化)
165. 小猫爬山 - AcWing题库 翰翰和达达饲养了 N 只小猫,这天,小猫们要去爬山。 经历了千辛万苦,小猫们终于爬上了山顶,但是疲倦的它们再也不想徒步走下山了(呜咕>_<)。 翰翰和达达只好花钱让它们…...

【Linux系统基础】(6)在Linux上大数据NoSQL数据库HBase集群部署、分布式内存计算Spark环境及Flink环境部署详细教程
大数据NoSQL数据库HBase集群部署 简介 HBase 是一种分布式、可扩展、支持海量数据存储的 NoSQL 数据库。 和Redis一样,HBase是一款KeyValue型存储的数据库。 不过和Redis设计方向不同 Redis设计为少量数据,超快检索HBase设计为海量数据,…...
多维时序 | MATLAB实CNN-BiGRU-Mutilhead-Attention卷积网络结合双向门控循环单元网络融合多头注意力机制多变量时间序列预测
多维时序 | MATLAB实现CNN-BiGRU-Mutilhead-Attention卷积网络结合双向门控循环单元网络融合多头注意力机制多变量时间序列预测 目录 多维时序 | MATLAB实现CNN-BiGRU-Mutilhead-Attention卷积网络结合双向门控循环单元网络融合多头注意力机制多变量时间序列预测预测效果基本介…...

vs快捷键
ctrlMo 折叠代码块 ctrlML 打开代码块...

linux 内核时间计量方法
定时器中断由系统定时硬件以规律地间隔产生; 这个间隔在启动时由内核根据 HZ 值来编 程, HZ 是一个体系依赖的值, 在 <linux/param.h>中定义或者它所包含的一个子平台文 件中. 在发布的内核源码中的缺省值在真实硬件上从 50 到 1200 嘀哒每秒, 在软件模拟 器中往下到 24.…...
循环神经网络中的梯度消失或梯度爆炸问题产生原因分析(二)
上一篇中讨论了一般性的原则,这里我们具体讨论通过时间反向传播(backpropagation through time,BPTT)的细节。我们将展示目标函数对于所有模型参数的梯度计算方法。 出于简单的目的,我们以一个没有偏置参数的循环神经…...

JWT signature does not match locally computed signature
1. 问题背景 最近在协助团队小盆友调试一个验签问题,结果还“节外生枝”了,原来不是签名过程的问题,是token的问题。 当你看到“JWT signature does not match locally computed signature. JWT validity cannot be asserted and should not…...
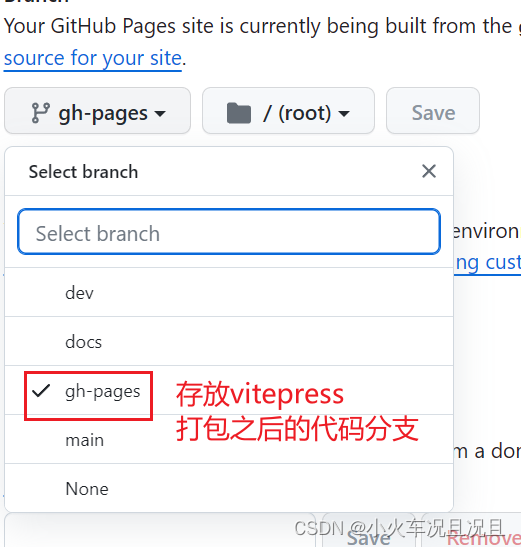
vitepress项目使用github的action自动部署到github-pages中,理论上可以通用所有
使用github的action自动部署到github-pages中 创建部署的deploy.yml文件,在项目的根目录下面 .github\workflows\deploy.yml 完整的代码:使用的是pnpm进行依赖安装。 name: 部署VitePresson:push:branches:- docs # 这段是在推送到 docs 分支时触发该…...

Python爬虫---解析---JSONPath
Xpath可以解析本地文件和服务器响应的文件,JSONPath只能解析本地文件 1. 安装jsonpath:pip install jsonpath 注意:需要安装在python解释器相同的位置,例如:D:\Program Files\Python3.11.4\Scripts 2. 使用步骤 2.1 导入&…...

路由器介绍和命令操作
先来回顾一下上次的内容: ip地址就是由32位二进制数组 二进位数就是只有数字0和1组成 网络位:类似于区号,表示区域作用 主机位:类似于号码,表示区域中编号 网络名称:网络位不变,主机位全为0 …...

Hadoop——分布式计算
一、分布式计算概述 1. 什么是计算、分布式计算? 计算:对数据进行处理,使用统计分析等手段得到需要的结果分布式计算:多台服务器协同工作,共同完成一个计算任务2. 分布式计算常见的2种工作模式分散->汇总 (MapReduce就是这种模式)将数据分片,多台服务器各自负责一…...

LaTeX引用参考文献 | Texstudio引用参考文献
图片版教程: 文字版教程: ref.bib里面写参考的文献,ref.bib和document.tex要挨着放,同一个目录里面. 解析一下bib文件格式:aboyeji2023effect是引用文献的关键字,需要在正文document.tex里面使用\cite指令…...

如何在Go中使用模板
引言 您是否需要以格式良好的输出、文本报告或HTML页面呈现一些数据?你可以使用Go模板来做到这一点。任何Go程序都可以使用text/template或html/template包(两者都包含在Go标准库中)来整齐地显示数据。 这两个包都允许你编写文本模板并将数据传递给它们,以按你喜欢的格式呈…...

云原生之深入解析基于FunctionGraph在Serverless领域的FinOps的探索和实践
一、背景 Serverless 精确到毫秒级的按用付费模式使得用户不再需要为资源的空闲时间付费。然而,对于给定的某个应用函数,由于影响其计费成本的因素并不唯一,使得用户对函数运行期间的总计费进行精确的事先估计变成了一项困难的工作。以传统云…...
电子电器架构(E/E)演化 —— 主流主机厂域集中架构概述
电子电器架构(E/E)演化 —— 主流主机厂域集中架构概述 我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。 老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师: 屏蔽力是信息过载时代一个人的特殊竞争力,任何消耗你的人和事,多看一眼都是你的不对。…...

Python常用的几个函数
print()函数:用于打印输出信息到控制台。 input()函数:用于从控制台获取用户输入。 len()函数:用于获取字符串、列表、元组、字典等对象的长度。 range()函数:用于生成一个整数序列,常用于循环中。 type()函数&…...
【Linux系统基础】(2)在Linux上部署MySQL、RabbitMQ、ElasticSearch等各类软件
实战章节:在Linux上部署各类软件 前言 为什么学习各类软件在Linux上的部署 在前面,我们学习了许多的Linux命令和高级技巧,这些知识点比较零散,同学们跟随着课程的内容进行练习虽然可以基础掌握这些命令和技巧的使用,…...
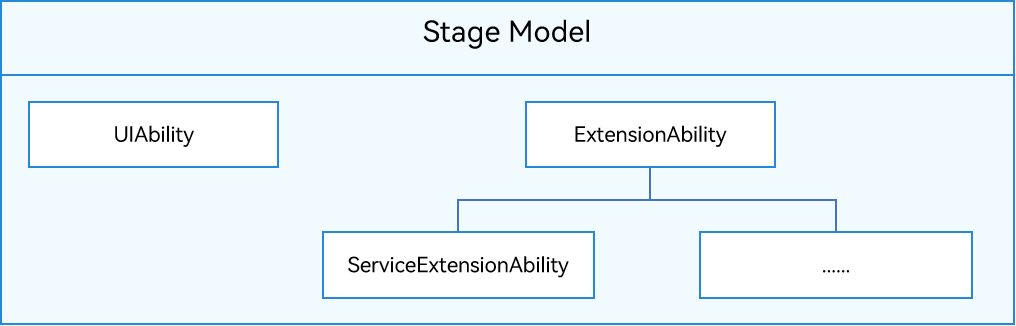
HarmonyOS4.0系统性深入开发01应用模型的构成要素
应用模型的构成要素 应用模型是HarmonyOS为开发者提供的应用程序所需能力的抽象提炼,它提供了应用程序必备的组件和运行机制。有了应用模型,开发者可以基于一套统一的模型进行应用开发,使应用开发更简单、高效。 HarmonyOS应用模型的构成要…...

VTube Studio API架构解析:构建下一代虚拟主播交互生态的核心技术
VTube Studio API架构解析:构建下一代虚拟主播交互生态的核心技术 【免费下载链接】VTubeStudio VTube Studio API Development Page 项目地址: https://gitcode.com/gh_mirrors/vt/VTubeStudio 探索虚拟主播技术生态的核心构建模块,VTube Studio…...

STM32 HAL库设计解析:从GPIO到外设的面向对象编程实践
1. 项目概述:从寄存器操作到HAL API的思维跃迁如果你是从标准外设库(SPL)或者更早的寄存器直接操作时代过来的STM32开发者,第一次接触HAL库时,可能会觉得有点“绕”。为什么一个简单的引脚翻转,不再是对GPI…...

第一章-09-相应类型-HTML格式
1.响应类型设置方式2.装饰器中指定响应类3.响应 HTML 格式设置响应类为 HTMLResponse,当前接口即可返回 HTML 内容...

FPGA新手避坑指南:用Vivado IP核搞定AXI总线,从看懂波形开始
FPGA新手避坑指南:用Vivado IP核搞定AXI总线,从看懂波形开始 第一次在Vivado中看到AXI总线波形时,我盯着屏幕上跳动的信号线完全摸不着头脑。VALID和READY信号像在玩捉迷藏,突发传输的时序如同天书——这大概是每个FPGA初学者都会…...
)
Vue2项目里,用lodash的debounce给搜索框‘降降温’(附完整代码和常见坑点)
Vue2实战:用lodash的debounce优化搜索框性能与避坑指南 搜索框是Web应用中最高频的交互组件之一,但处理不当可能成为性能黑洞。当用户快速输入"vue"、"react"等关键词时,传统实现会为每个字符触发搜索请求,导…...
)
别再乱写Flash了!W25Q128JV SPI Flash寿命管理与日志记录实战(附STM32代码)
W25Q128JV SPI Flash寿命优化与高可靠日志系统设计实战 在嵌入式设备开发中,数据持久化存储是确保设备可靠运行的关键环节。W25Q128JV作为128Mbit容量的SPI Flash存储器,凭借其高性价比和易用性,成为众多嵌入式项目的首选。然而,许…...

STM32驱动MAX31855测温模块:从SPI时序到代码实现的保姆级避坑指南
STM32驱动MAX31855测温模块:从SPI时序到代码实现的保姆级避坑指南 在嵌入式开发领域,精确的温度测量往往是项目成败的关键。MAX31855作为一款集成冷端补偿的热电偶数字转换器,凭借其2℃的高精度和-200℃至700℃的宽测温范围,成为工…...

从零构建智能体工作流引擎:核心架构、实现与生产级实践
1. 项目概述:从零构建一个智能体工作流引擎最近在GitHub上看到一个名为agentkit的项目,来自BCG X的官方仓库。这个标题立刻引起了我的兴趣,因为它直指当前AI应用开发中的一个核心痛点:如何高效、可靠地编排和管理多个AI智能体&…...

安卓位置伪装的终极指南:3步掌握应用级虚拟定位
安卓位置伪装的终极指南:3步掌握应用级虚拟定位 【免费下载链接】FakeLocation Xposed module to mock locations per app. 项目地址: https://gitcode.com/gh_mirrors/fak/FakeLocation 你是否曾因社交软件暴露真实位置而感到不安?是否需要在不同…...

qmc-decoder:专业QMC音频文件解密转换工具
qmc-decoder:专业QMC音频文件解密转换工具 【免费下载链接】qmc-decoder Fastest & best convert qmc 2 mp3 | flac tools 项目地址: https://gitcode.com/gh_mirrors/qm/qmc-decoder qmc-decoder是一款高效、专业的QMC音频文件解密转换工具,…...