基于采样的自动驾驶规划算法 - PRM,RRT,RRT*,CL-RRT
本文将讲解PRM,RRT,RRT*自动驾驶规划算法原理,不正之处望读者指正
0 前言
机器人运动规划的基本任务:从开始位置到目标位置的运动
(1)如何躲避构型空间出现的障碍物
(2)如何满足机器人本身在机械、传感方面的速度、加速度等限制
基于采样的运动规划算法就是解决如何躲避构型空间出现的障碍物。
配置空间
机器人规划的配置空间概念:一个空间包含所有机器人自由度的机器人配置,描述为 C − s p a c e C-space C−space
机器人配置:表示对机器人上点的位置的描述
机器人自由度:规划的时候用最少的坐标数量去表示机器人配置
机器人配置空间:一个空间包含所有机器人自由度的机器人配置,描述为C-space
机器人的位姿在C-space中描述为一个点
机器人配置空间的意义:
在工作空间中进行规划,机器人有不同的形状和大小,需要根据不同的形状大小去做碰撞检测,是费时费力的。
在配置空间中做规划

机器人在C-space中表示一个点,障碍物做特殊的处理,把工作空间中的障碍物变成配置空间中的障碍物C-obstacle,这个工作是在运动规划前完成的,一次完成的工作。
障碍物按照机器人尺寸进行膨胀,上面机器人被设置成了一个点,只要点在障碍物外面,就不会发生碰撞
C-space = C-obstacle + C-free
经过配置空间的处理,路径规划变成了在C-free中找到起点到终点的路径寻找
1 概率路线图(PRM)

1.1 核心思想
(1)学习预处理阶段
- 在配置空间中随机采样足够密集的点
- 如果可以相互到达,连接附近的点
(2)查询搜索阶段
采用图搜索算法对G搜索,如果能找到起始点S到终点G的路线,存在可行路径
1.2 PRM主要步骤
(1)采样足够密集的点学习地图结构

(2)对采样的点碰撞检查,只保留在C-free中的采样点

(3)每个点通过直线连接到最近的邻居

(4)删除碰撞连接

(5)无碰撞连接被保留为边构造图

(6)添加起点s和终点g到Graph中

(7)利用图搜索算法A*/Dijstra在路线图里面搜索出一条最优路径

1.3 算法流程

PRM算法流程
1 learning-phase阶段:
V V V:构建的图的所有顶点的集合
E E E:图中所有边的集合
2 采样点个数为n
3 通过某种采样策略,不同分布得到采样点
4 以采样点为中心, r r r为半径,在这个圆范围内的邻居节点,把它记录到 U U U中
5 把采样点加入到顶点集 V V V中
6 遍历邻居节点集 U U U的每个节点
7-8 定义一些规则滤除一些节点和边
7 采样点 x r a n d x_{rand} xrand和已有的节点处在相同的邻接元素下,跳过
8 碰撞检测,检测 x r a n d x_{rand} xrand和 u u u是不是发生碰撞,如果Free,就把 x r a n d x_{rand} xrand和 u u u连成的边加入到 E E E中
9 重复n次之后,就得到了一个完整的图 G = ( V , E ) G = (V,E) G=(V,E)
最后应用图搜索算法在G上找到一条最优路径
sPRM算法与PRM算法的区别:
只要采样到某个节点,就把以r为半径圆里面所有的节点都进行一个连接,边比PRM多,搜索消耗的资源更大
选择节点之间的连接方式:
(1)k近邻PRM
选择采样点周围最近的k个邻居
U ← k N e a r e s t ( G = ( V , E ) , v , k ) U\gets kNearest(G=(V,E),v,k) U←kNearest(G=(V,E),v,k)
(2)有界维度PRM
就是以常规的PRM算法为基础,如果圆里面采样点过多,就找采样点的k个邻居取交集
U ← N e a r ( G , x r a n d , r ) ∩ k N e a r e s t ( G = ( V , E ) , v , k ) U\gets Near(G,x_{rand},r)\cap kNearest(G=(V,E),v,k) U←Near(G,xrand,r)∩kNearest(G=(V,E),v,k)
(3)可变半径PRM
把r为半径的圆作为采样节点个数n的函数,采样点较少情况下,r可以取大一点,采样点足够多的时候,r取小一点
PRM*算法流程
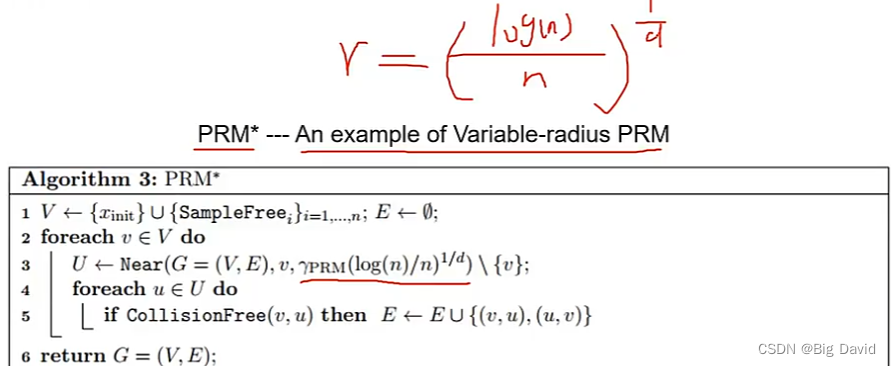
d d d:维度
n n n:采样节点个数
1.4 PRM算法的优点和缺点
优点:
概率完备性,如果运行时间足够长(或者采集足够多的点),如果有解一定是最优解
缺点:
(1)在整个状态空间上构造图,需要连接特定的开始和目标,可能浪费一些不必要的资源
(2)使用直线连接不符合车辆运动学约束
(3)抽样方法的完备性很弱,即使空间存在合理的路径,由于抽样参数的设置,也可能无法找到路径。因为随机抽样,所以该方法稳定性也不好,对于同样的问题,前后两次解不一样,在严格要求稳定性的场合不适用
采样点的数量和采样点存在通路的最大距离是路径规划成功的关键
2 RRT
2.1 RRT核心思想和特点
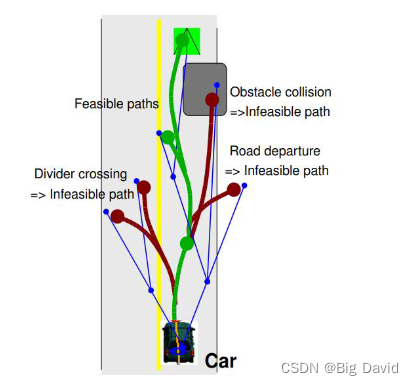
RRT是一种通过随机构建空间填充树来有效搜索非凸,高维空间的算法。
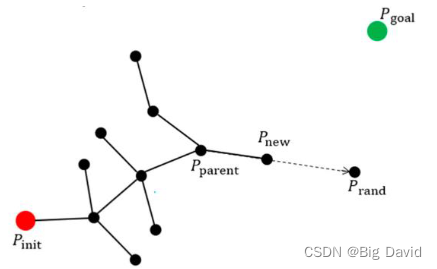
核心思想:RRT 算法首先将起点初始化为随机树的根节点,然后在机器人的可达空间中随机生成采样点,从树的根节点逐步向采样点扩展节点,节点和节点之间的连线构成了整个随机树,当某个节点与目标点的距离小于设定的阈值时,即可认为找到可行路径。

RRT的特点就是能够快速有效地搜索高维空间,通过状态空间的随机采样点,把搜索导向空白区域,从而寻找到一条从起始点到目标点的规划路径,适合解决多自由度机器人在复杂环境下和动态环境中的路径规划
2.2 算法流程
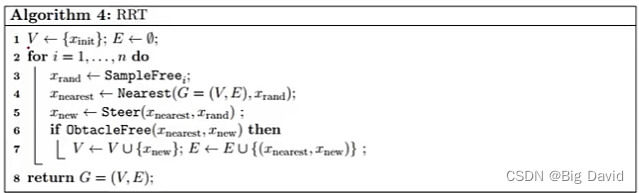
1 将 x i n i t x_{init} xinit加入到顶点集 V V V中
2 采样n次
3 随机采样得到 x r a n d x_{rand} xrand
4 图中距离 x r a n d x_{rand} xrand最近的节点 x n e a r e s t x_{nearest} xnearest
5 连接 x r a n d x_{rand} xrand和 x n e a r e s t x_{nearest} xnearest,之间的节点 x n e w x_{new} xnew
6-7 只有通过碰撞检测,才会把 x n e w x_{new} xnew加入顶点集 V V V,连接 x n e a r e s t x_{nearest} xnearest和 x n e w x_{new} xnew
2.3 RRT优缺点
优点:
(1)简单找到起点到终点的路径,比PRM更高效,该算法通过尽可能少地探索环境,来实现有效的单一路径规划,对未知环境适应能力强
(2)RRT 算法通过随机树向未观察的空间区域生长,并且不会回归到已经探索过的区域,这实现了对空间的快速探索
(3)搜索方法不是维持固定的栅格结构,而是在运行中构建随机树,通过随机树内部的节点的连接找到路径。
缺点:
(1)不满足概率完备性,只能连接最近的节点
(2)需要对输入空间进行离散化,采样次数太少,则生成的路径将表现出较差的性能,采样次数太多则会增加整个规划过程的计算量,降低路径规划的实时性
(3)RRT算法生成的路径存在冗余的节点,增加机器人实际运行中的路程
2.4 RRG
RRT的变体,具有概率完备性

核心思想:
不要只连接 x n e w x_{new} xnew和 x n e a r e s t x_{nearest} xnearest
尝试连接到半径内的所有顶点
最后需要接入图搜索算法寻找一条最优路径,违背了RRT的初衷,没有把构造图和搜索步骤合二为一
2.5 基于运动学的RRT
区别在于5 使用基于运动学的方法来引导两个节点
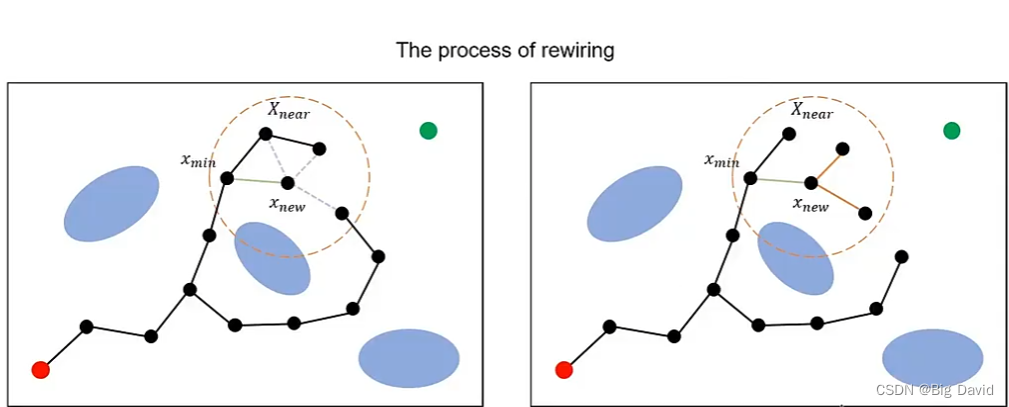
3 RRT*
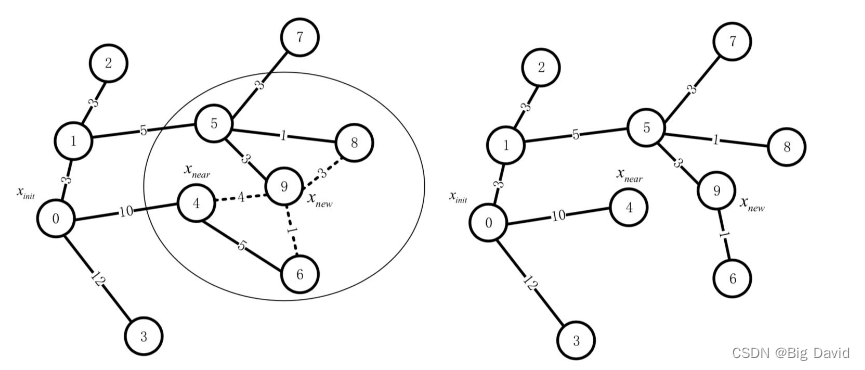
3.1 核心思想
(1)相比于RRG算法,维护树结构而不是图,会从图中删除多余的边
(2)相比于RRT算法,添加了“rewire"操作(每次采样到新的节点,会把以他为圆心,半径为r的圆内其他节点作为一个考量,对这些节点做一些修剪的操作)确保通过最小成本路径到达顶点
3.2 RRT*算法流程
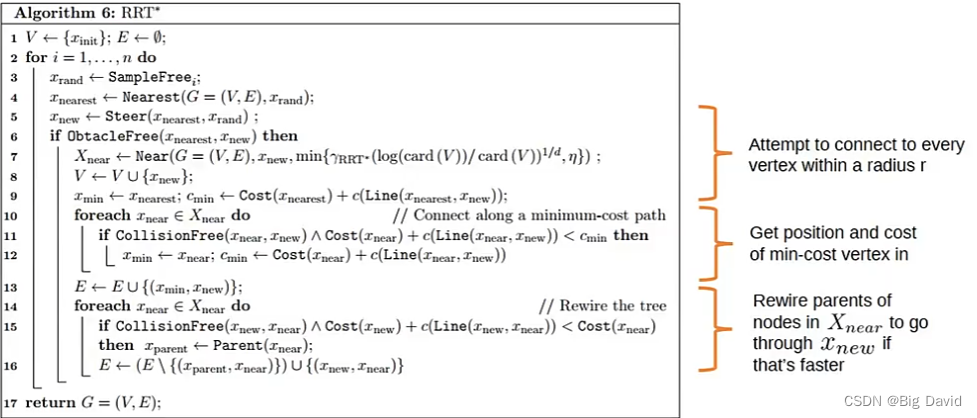
前半部分与RRT相同
后半部分
(1)连接以r为半径的圆的所有顶点,在集合中选择cost最小的去连接
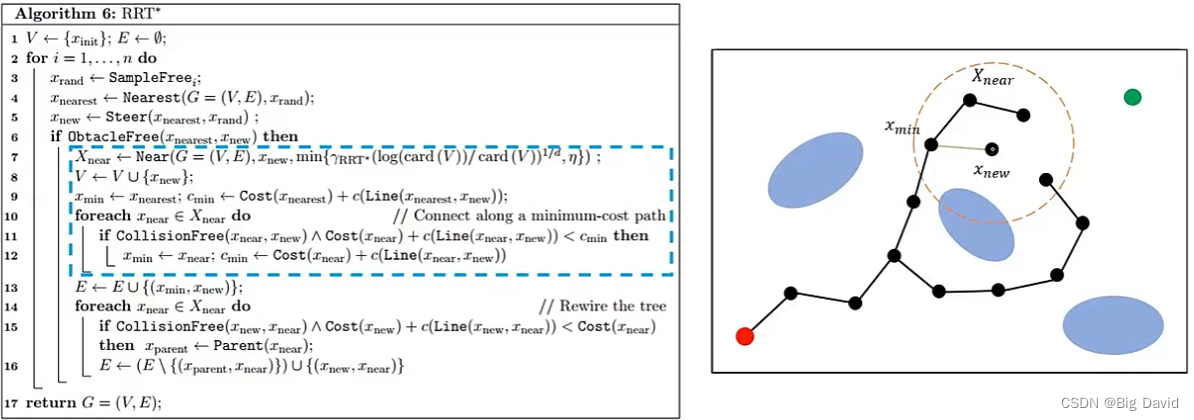
(2)得到了 x n e a r x_{near} xnear,依次遍历每一个节点,判断累计成本最小的,将 x n e a r x_{near} xnear标记为 x m i n x_{min} xmin:保证 x n e w x_{new} xnew本身的最优性
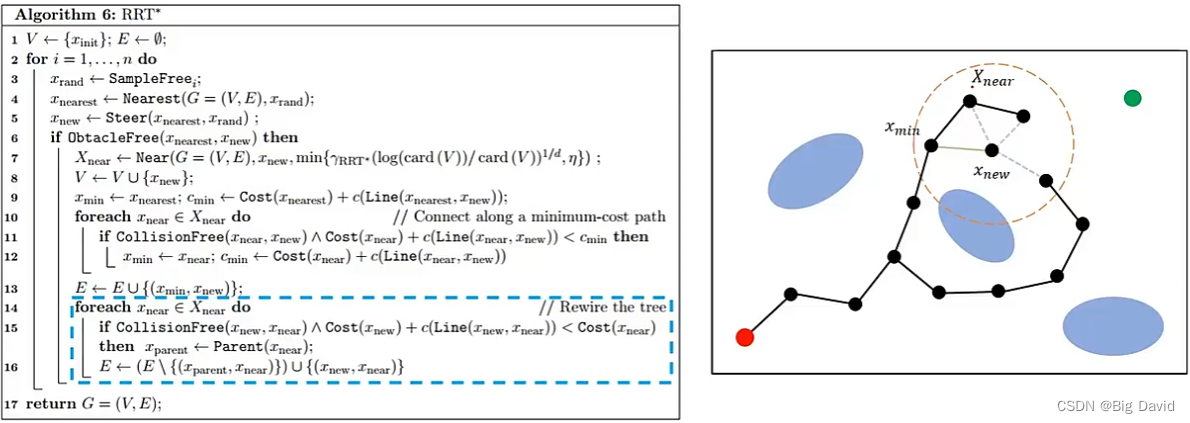
(3)对树做修剪:每次采样到 x n e w x_{new} xnew之后,周围其他节点都会做一次检查,判断是否能找到cost最小的路径
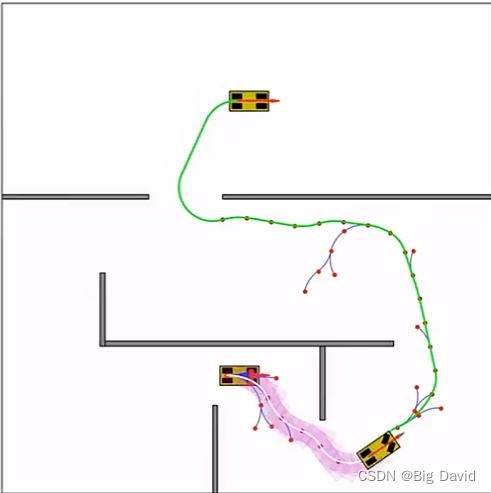
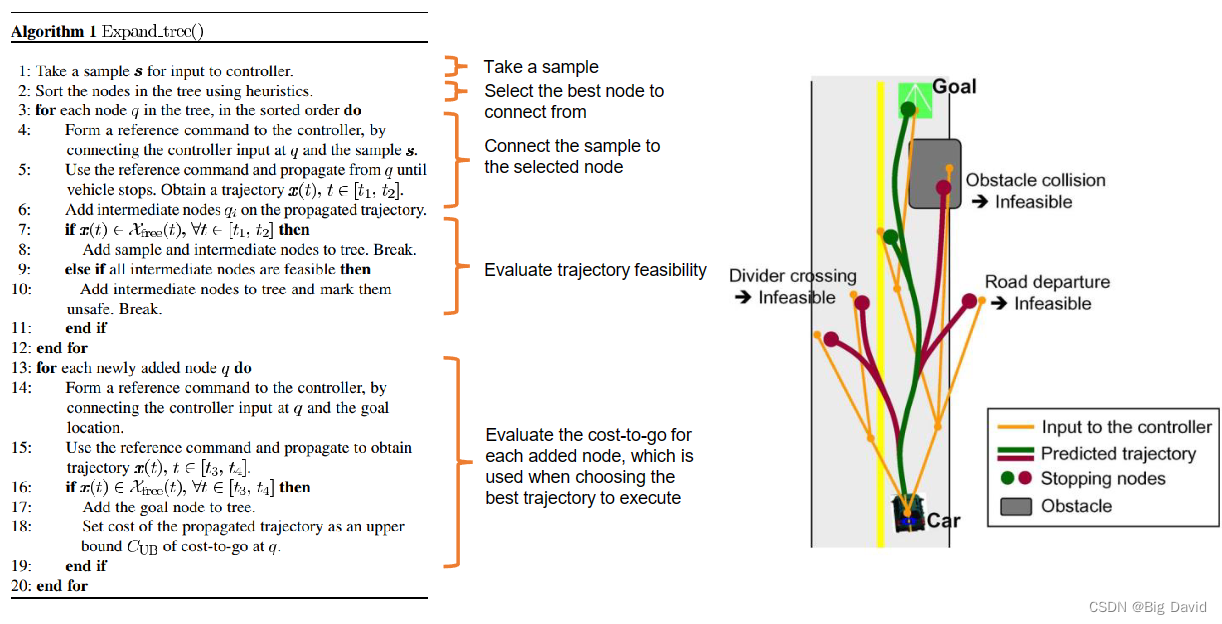
4 CL-RRT
核心思想:
(1)相比于对车辆输入进行采样的标准的RRT,CL-RRT对控制器的输入进行采样
(2)通过前向模拟得到动态可行轨迹
(3)对于城市场景,优化算法策略:采样策略、节点选择策略
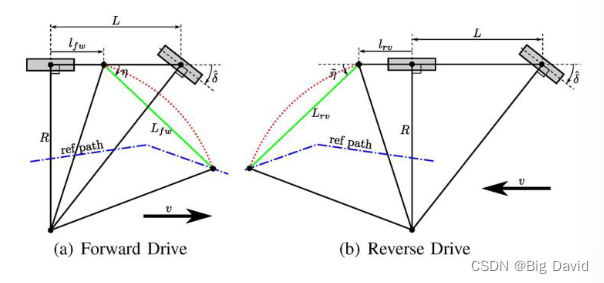
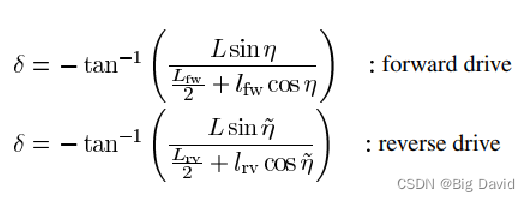
转向控制器:Pure-Pursuit Controller
速度控制器:PI Controller

采样策略:

n r 、 n θ n_r、n_\theta nr、nθ:具有高斯分布的随机变量
σ r \sigma_r σr:径向标准差
σ θ \sigma_\theta σθ:圆周方向标准差
根据车辆位置和道路规则改变这些参数
Node选择策略:
(1)RRT试图将样本连接到树中最近的节点,当RRT应用于转弯能力有限的车辆时,需要进行拓展
(2)CL-RRT算法使用节点和采样点之间的Dubins路径长度作为距离度量
Reeds-Shepp曲线和Dubins曲线
相关文章:
基于采样的自动驾驶规划算法 - PRM,RRT,RRT*,CL-RRT
本文将讲解PRM,RRT,RRT*自动驾驶规划算法原理,不正之处望读者指正 0 前言 机器人运动规划的基本任务:从开始位置到目标位置的运动 (1)如何躲避构型空间出现的障碍物 (2)如何满足机器…...
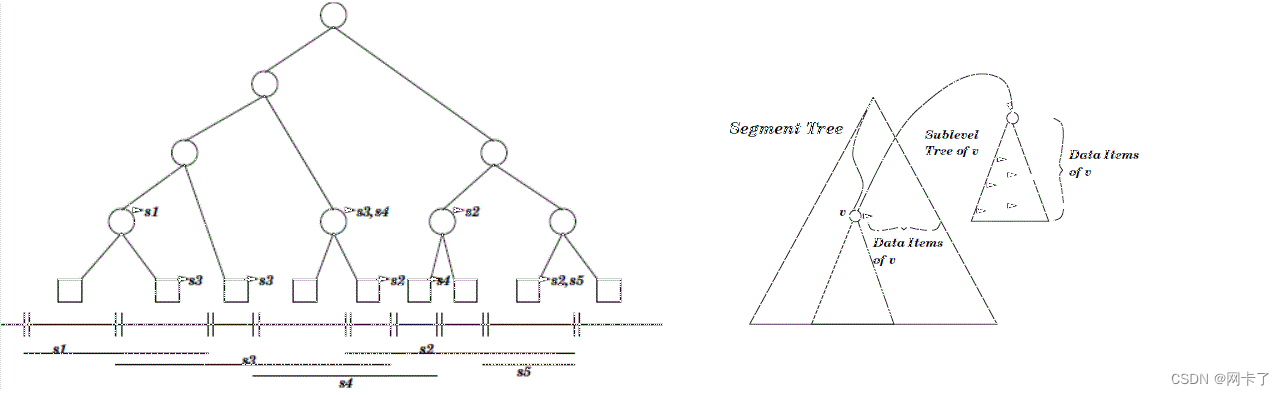
CGAL的D维范围树和线段树
范围树和线段树是两种数据结构,用于高效地处理和查询数据。 范围树(Range Tree)是一种二叉树,它通过递归地将每个节点分割成两个子节点来存储一个点集。每个节点表示一个范围,并且存储该范围内所有点的最小和最大值。范…...
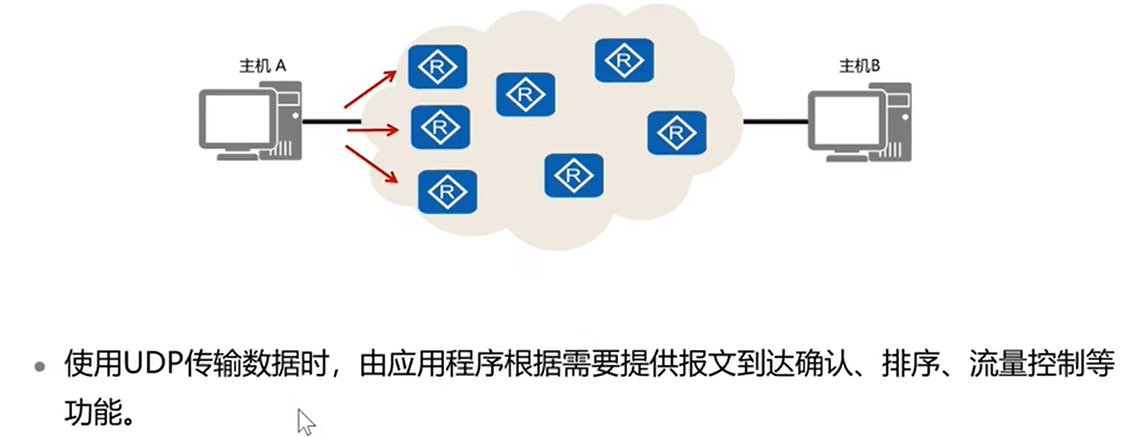
005.HCIA 传输层
传输层定义了主机应用程序之间端到端的连通性。传输层中最为常见的两个协议分别是传输控制协议TCP (Transmission Control Protocol)和用户数据包协议UDP (User Datagram Protocol)。 1、相关概念 a. 传输层的端口 端口范围:0-65535 知名端口:0-1023&…...
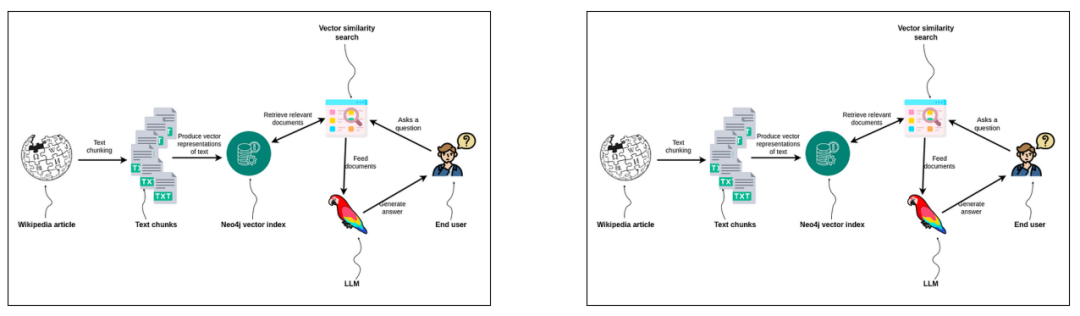
LLM之RAG实战(八)| 使用Neo4j和LlamaIndex实现多模态RAG
人工智能和大型语言模型领域正在迅速发展。一年前,没有人使用LLM来提高生产力。时至今日,很难想象我们大多数人或多或少都在使用LLM提供服务,从个人助手到文生图场景。由于大量的研究和兴趣,LLM每天都在变得越来越好、越来越聪明。…...
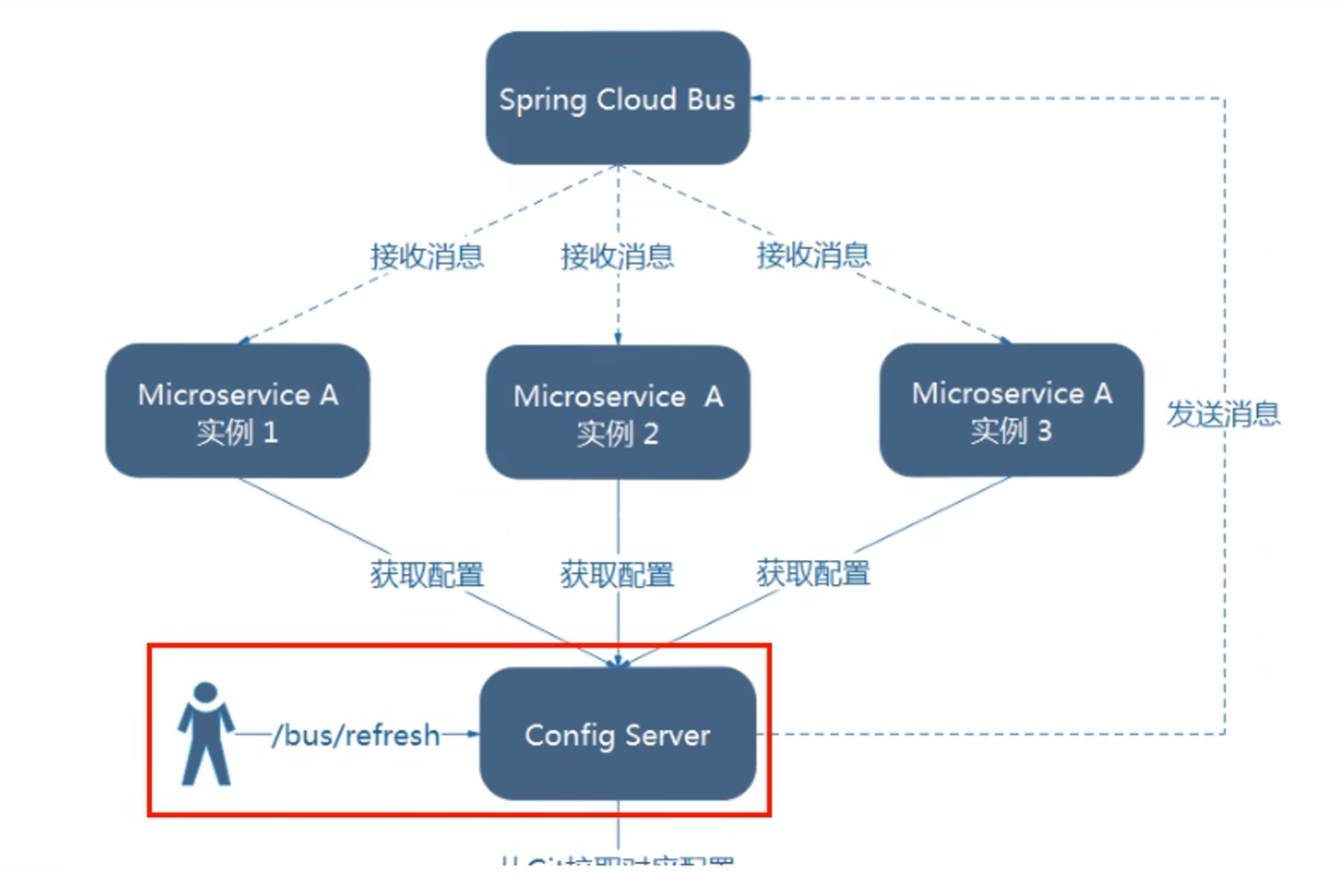
【SpringCloud笔记】(10)消息总线之Bus
Bus 前言 戳我了解Config 学习Config中我们遇到了一个问题: 当我们修改了GitHub上配置文件内容,微服务需要配置动态刷新并且需要手动向客户端发送post请求刷新微服务之后才能获取到GitHub修改过后的内容 假如有多个微服务客户端3355/3366/3377…等等…...

超酷的爬虫可视化界面
大家好,本文主要介绍使用tkinter获取本地文件夹、设置文本、创建按钮下拉框和对界面进行布局。 1.导入tkinter库 导入tkinter的库,可以使用ttkbootstrap美化生成的界面 ttkbootstrap官网地址:https://ttkbootstrap.readthedocs.io/en/late…...
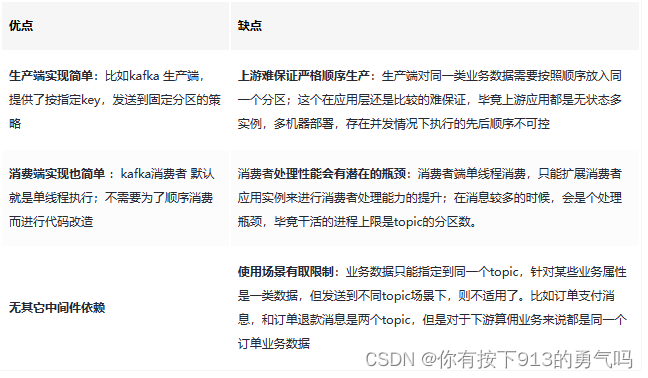
【kafka消息里会有乱序消费的情况吗?如果有,是怎么解决的?】
文章目录 什么是消息乱序消费了?顺序生产,顺序存储,顺序消费如何解决乱序数据库乐观锁是怎么解决这个乱序问题吗 保证消息顺序消费两种方案固定分区方案乐观锁实现方案 前几天刷着视频看见评论区有大佬问了这个问题:你们的kafka消…...

【PID精讲12】基于MATLAB和Simulink的仿真教程
文章目录 写在前面一、基于Simulink的仿真1. 新建Simulink模型2. 保存Simulink模型3. 建模4. 运行二、基于MATLAB的仿真1. 编码2. 运行3. 调整曲线格式4. 导出图窗写在前面 第11讲介绍的连续系统的数字PID仿真是基于 Matlab的 M 语言实现的,对于初学者或者工程应用人员来说,…...

手机无人直播:解放直播的新方式
现如今,随着科技的迅猛发展,手机已经成为我们生活中不可或缺的一部分。除了通讯、娱乐等功能外,手机还能够通过直播功能将我们的生活实时分享给他人。而针对传统的直播方式,使用手机进行无人直播成为了一种全新的选择。 手机无人…...
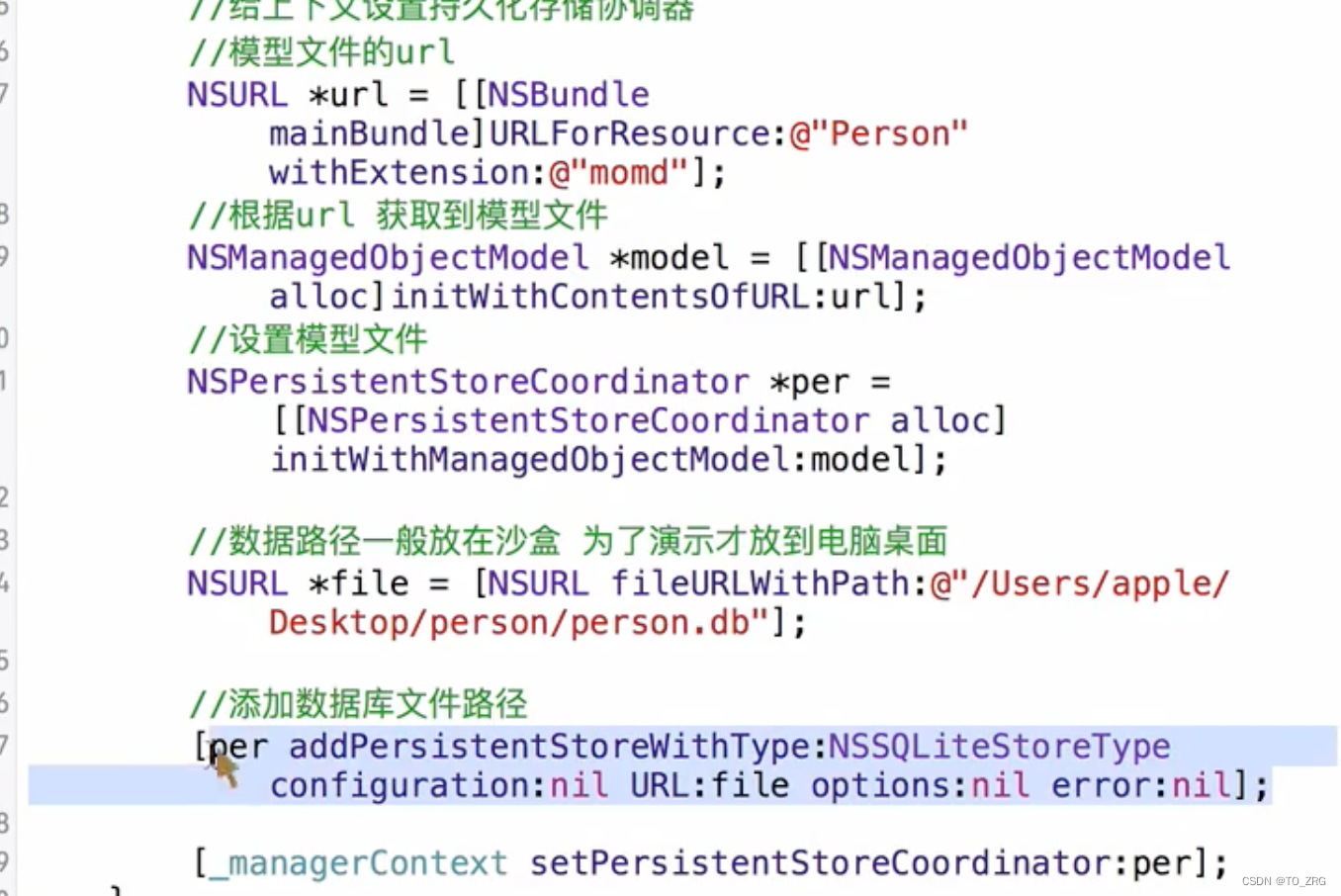
ios 之 数据库、地理位置、应用内跳转、推送、制作静态库、CoreData
第一节:数据库 常见的API SQLite提供了一系列的API函数,用于执行各种数据库相关的操作。以下是一些常用的SQLite API函数及其简要说明:1. sqlite3_initialize:- 初始化SQLite库。通常在开始使用SQLite之前调用,但如果没有调用&a…...

Django(三)
1.快速上手 确保app已注册 【settings.py】 编写URL和视图函数对应关系 【urls.py】 编写视图函数 【views.py】 启动django项目 命令行启动python manage.py runserverPycharm启动 1.1 再写一个页面 2. templates模板 2.1 静态文件 2.1.1 static目录 2.1.2 引用静态…...
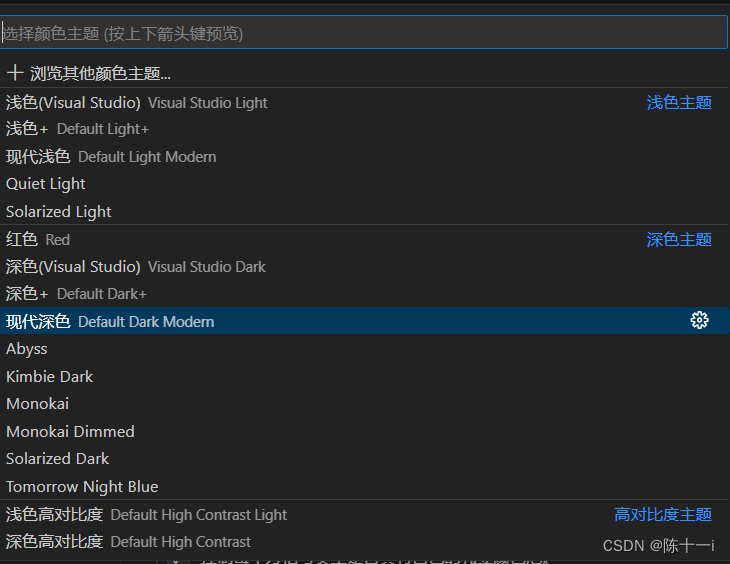
vscode括号颜色突然变成白色的了,怎么解决
更新版本后发现vscode的各种括号都变成了白色,由于分色括号已经使用习惯,突然变成白色非常不舒服,尝试多次后,为大家提供一下几种解决方式,希望能帮到同样受到此种困惑的你: 第一种: 首先打开…...

测试服务器带宽(ubuntu)
apt install python3 python3-pippip3 install speedtest-clispeestest-cli...
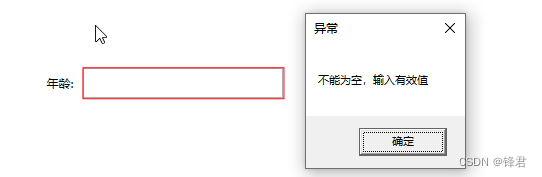
【WPF】使用Behavior以及ValidationRule实现表单校验
文章目录 使用ValidationRule实现检测用户输入EmptyValidationRule 非空校验TextBox设置非空校验TextBox设置非空校验并显示校验提示 结语 使用ValidationRule实现检测用户输入 EmptyValidationRule是TextBox内容是否为空校验,TextBox的Binding属性设置ValidationRu…...
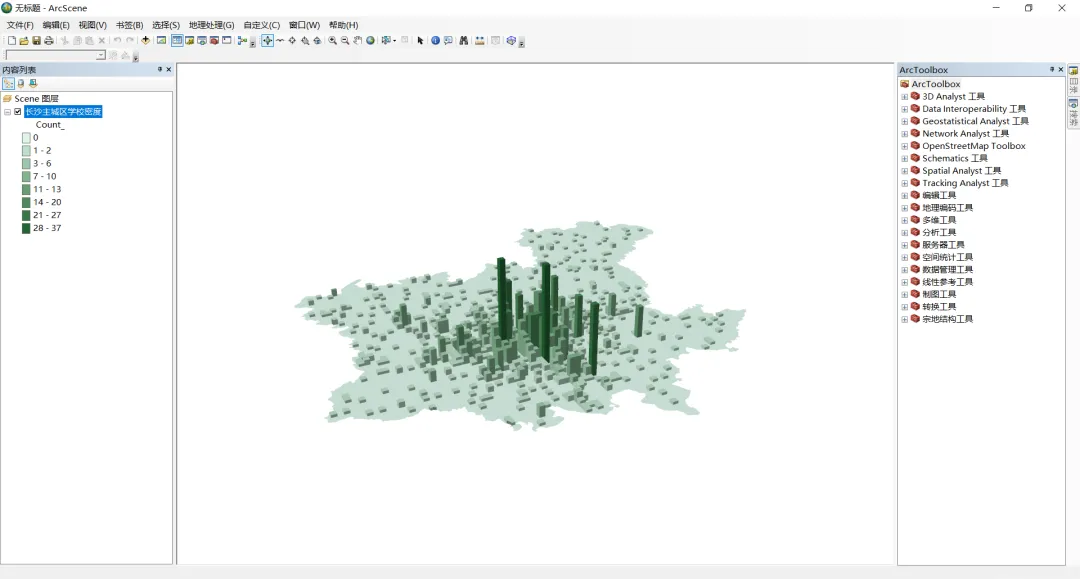
ArcGIS渔网的多种用法
在ArcGIS中有一个渔网工具,顾名思义,可以用来创建包含由矩形像元所组成网络的要素类。不太起眼,但它的用途却有很多,今天跟大家分享一篇关于渔网的多种用途。 1.马赛克地图制作 2.基于网格的设施密度统计制作马赛克地图 准备材…...

C++ 中使用 std::map 的一个示例
std::map 是一个容器,可以用来存储键值对,其中键是唯一的,每个键都映射到一个值 #include <iostream> #include <map>int main() {// 声明了一个 std::map<std::string, int> 类型的变量 myMap,它可以将字符串…...

python虚拟环境及其在项目实践中的应用
文章目录 1.问题的提出1.什么是python虚拟环境2.如何创建2.1第1步-为共享同一虚拟环境的项目创建共同的父目录2.2第2步-在父目录下创建虚拟python环境2.3在父目录下创建各个项目文件夹 1.问题的提出 假设我正在开发若干python项目,这里假定项目名分别为Project1&am…...
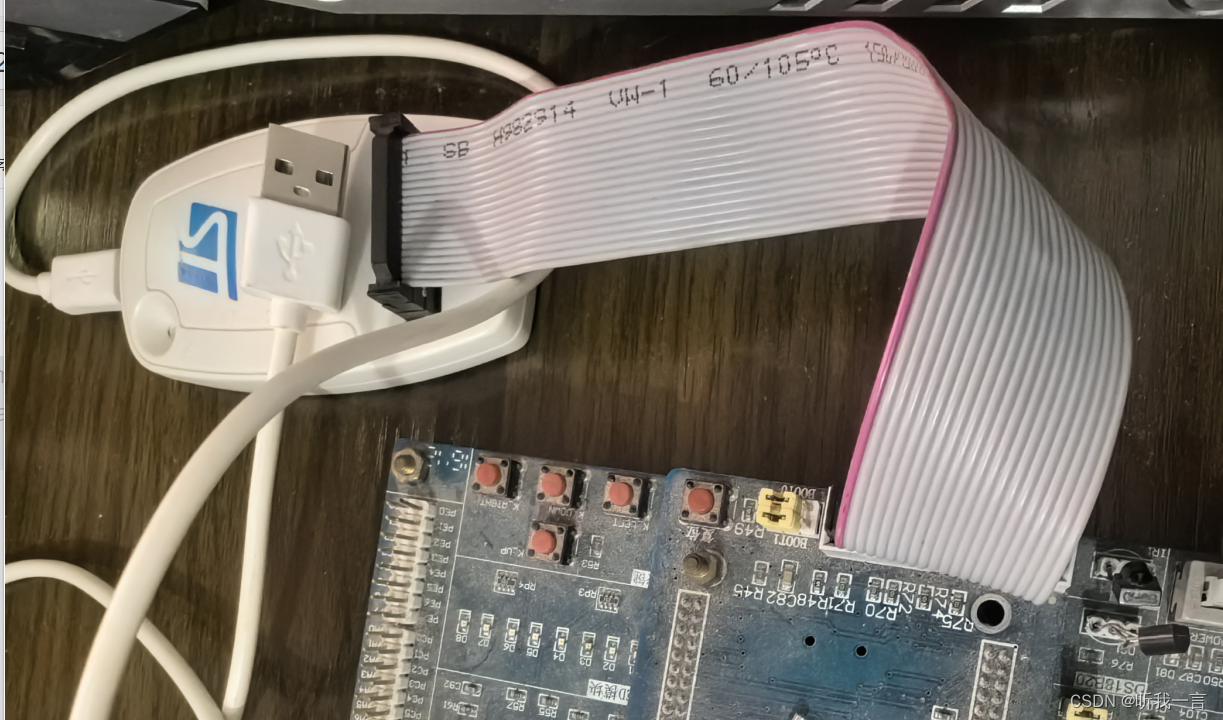
普中STM32-PZ6806L开发板(烧录方式)
前言 有两种方式, 串口烧录和STLink方式烧录;串口烧录 步骤 开发板USB转串口CH340驱动板接线到USB连接PC使用自带工具普中自动下载软件.exe烧录程序到开发板 ST Link方式 这种方式需要另外进行供电, 我买的如下,当年用于调试STM8的,也可…...
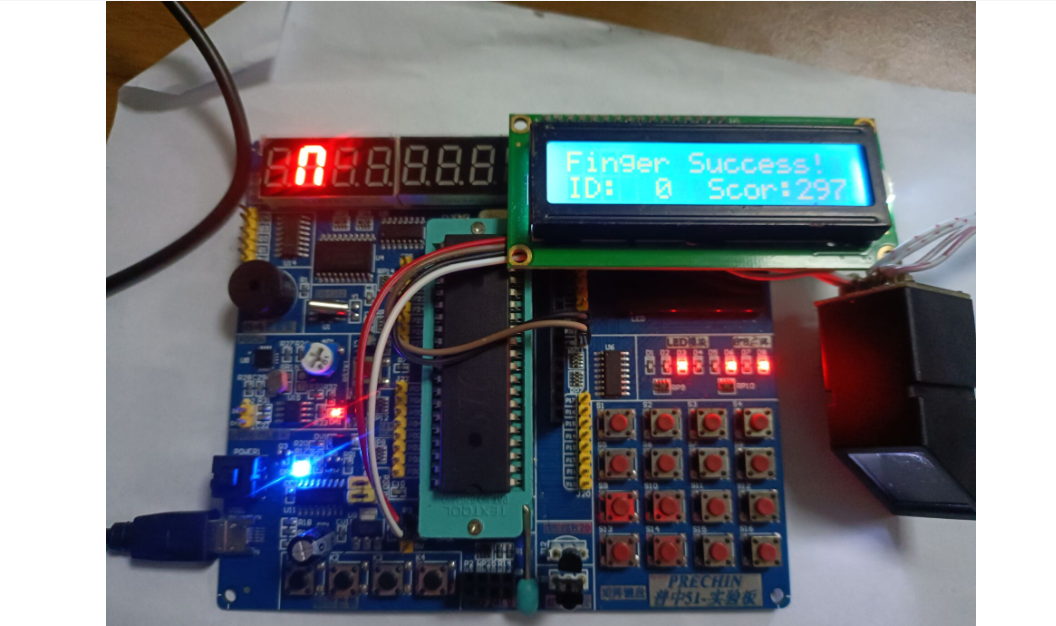
基于单片机设计的指纹锁(读取、录入、验证指纹)
一、前言 指纹识别技术是一种常见的生物识别技术,利用每个人指纹的唯一性进行身份认证。相比于传统的密码锁或者钥匙锁,指纹锁具有更高的安全性和便利性,以及防止钥匙丢失或密码泄露的优势。 基于单片机设计的指纹锁项目是利用STC89C52作为…...
HarmonyOS - 基础组件绘制
文章目录 所有组件开发 tipsBlankTextImageTextInputButtonLoadingProgress 本文改编自:<HarmonyOS第一课>从简单的页面开始 https://developer.huawei.com/consumer/cn/training/course/slightMooc/C101667360160710997 所有组件 在 macOS 上,组…...

Photoshop图层批量导出终极指南:如何快速将图层导出为独立文件
Photoshop图层批量导出终极指南:如何快速将图层导出为独立文件 【免费下载链接】Photoshop-Export-Layers-to-Files-Fast This script allows you to export your layers as individual files at a speed much faster than the built-in script from Adobe. 项目地…...
)
ModusToolbox 3.1.0 保姆级安装与配置指南(Windows版,含GitHub访问加速方案)
ModusToolbox 3.1.0 高效安装与深度配置实战(Windows环境) 对于嵌入式开发者而言,英飞凌的ModusToolbox无疑是一把打开物联网世界的金钥匙。然而,当这把钥匙遇到网络访问的铜墙铁壁时,许多开发者的热情往往被消磨在无尽…...

PIC24F Curiosity开发板实战:从MCC配置到低功耗设计
1. 项目概述与核心价值最近在做一个需要兼顾低功耗和实时控制的小型嵌入式项目,选型时又一次把目光投向了Microchip的PIC24F系列MCU。说实话,对于很多从8位机过渡过来的工程师,或者在校学生、创客爱好者来说,直接上手一款16位单片…...
)
手把手教你用MP1470芯片设计一个12V转5V的DCDC降压模块(附完整原理图与PCB布局避坑指南)
手把手教你用MP1470芯片设计一个12V转5V的DCDC降压模块(附完整原理图与PCB布局避坑指南) 在嵌入式系统开发中,稳定可靠的电源设计往往是项目成功的关键前提。当我们需要为STM32、ESP32等微控制器或各类传感器供电时,如何将常见的1…...
)
给Hadoop初学者的环境搭建备忘录:为什么你的JDK配置总在重启后‘消失’?(Linux基础解惑)
Hadoop环境搭建中的Linux系统原理:为什么你的配置总在重启后"消失"? 很多Hadoop初学者在搭建开发环境时,都会遇到一个令人困惑的问题:明明按照教程一步步配置好了JDK和Hadoop,为什么重启后环境变量就"消…...

全域矩阵系统的底层逻辑:从流量分散到流量聚合的技术解法
矩阵运营最大的坑,不是做不起来,是做着做着就散了。账号在A平台火了,B平台没动静;今天发了20条,明天只剩3条能坚持——问题的本质不是能力不够,是缺乏一套把分散流量聚合起来的全域矩阵系统架构。一、全域流…...

BiliTools:重新定义B站内容消费的技术解决方案
BiliTools:重新定义B站内容消费的技术解决方案 【免费下载链接】BiliTools A cross-platform bilibili toolbox. 跨平台哔哩哔哩工具箱,支持下载视频、番剧等等各类资源 项目地址: https://gitcode.com/GitHub_Trending/bilit/BiliTools 你是否曾…...

垂直搜索选型避坑指南,为什么83%的企业在DeepSeek V2.1升级后节省了67%标注成本?
更多请点击: https://codechina.net 第一章:垂直搜索选型避坑指南,为什么83%的企业在DeepSeek V2.1升级后节省了67%标注成本? 垂直搜索系统选型绝非简单替换关键词引擎——它直击领域知识建模、语义对齐与标注闭环三大痛点。Deep…...

订阅Token Plan套餐如何在实际开发中有效控制大模型调用成本
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 订阅Token Plan套餐如何在实际开发中有效控制大模型调用成本 对于开发团队而言,将大模型能力集成到自动化流程或内部工…...

CTF新手必看:一张图里藏了啥?手把手教你用010 Editor秒解BUUCTF图片隐写题
CTF新手入门:从图片隐写题中快速提取Flag的实战指南 当你第一次接触CTF比赛中的图片隐写题时,可能会感到无从下手。那些看似普通的图片背后,往往藏着关键的Flag信息。本文将带你一步步破解BUUCTF平台上的典型图片隐写题,使用010 E…...